
Abstract
This paper investigates the robust adaptive sliding mode control problem for a class of nonlinear uncertain neutral Markovian jump systems. In this study, the system state is unmeasurable and the upper norm bounds of the nonlinear functions are unavailable. An observer-based adaptive sliding mode controller is synthesized to render the resulting error system stochastically stable with a prescribed disturbance attenuation level. Finally, a numerical example is exploited to demonstrate the effectiveness of the control scheme.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
In practice, unpredictable structural changes may occur unexpectedly due to repairs of sudden environment disturbances, random failures, etc. [11, 39, 46, 47]. The use of neutral Markovian jump systems (MJSs) consisting of Markovian parameters is one of the appropriate ways to describe and model these types of dynamical systems. MJSs refer to a class of hybrid systems with multiple system modes where each mode corresponds to a deterministic subsystem, and the mode switching is dominated by a Markov process [25]. In the past few years, stochastic stability, stochastic stabilization, \(H_{\infty }\) filtering and \(H_{\infty }\) control of neutral MJSs have been investigated [5, 6, 9, 18, 23, 24, 30, 34, 41, 43, 44]. In [9], the authors investigated \(H_{\infty }\) sliding mode control (SMC) for uncertain stochastic systems with input nonlinearity and Markovian switching. In [43], the authors considered the stability analysis of neutral MJSs with both time-varying delay and partially unknown transition probabilities, but they did not include the parameter uncertainties, unknown nonlinearity or \(H_{\infty }\) performance. In [23], the authors investigated the problem of \(H_{\infty }\) control and passive filter design for Markovian jump impulsive networked control systems with uncertainties and random packet dropouts . The effects of nonlinearity, time delay and SMC control strategy, however, have not been considered.
Because of its robustness against model uncertainties, parameter variations and external disturbances, SMC has been proven to be an effective control algorithm for a variety of both linear and nonlinear systems [1–4, 7, 8, 29, 31, 40, 42, 48, 49]. To mention a few, in [4], the authors investigated the problem of SMC for stochastic MJSs with possible actuator degradation. Besides, \(H_{\infty }\) SMC has also been widely studied in [17, 38]. In particular, the authors presented a sliding mode controller for uncertain time-delay systems with \(H_{\infty }\) performance in [17] . Extensive attention has been paid to the observer-based SMC problem [17, 28, 45]. The authors in [28] proposed an SMC scheme based on the state estimation to stabilize a series of Itô stochastic time-delay systems. The SMC problem was considered by [33] in the case of Markovian jump linear systems with parameter uncertainties and disturbances. It appears, however, that the issue of SMC with \(H_{\infty }\) performance for uncertain neutral MJSs with unmeasured states and unknown nonlinearity has still not been adequately researched and this is the motivation for the study.
In this paper, we investigate the robust adaptive SMC problem for uncertain neutral MJSs with unmeasured states and unknown nonlinearity. In this design, the upper bounds of the nonlinear term are unknown and the parameter uncertainties are norm-bounded. An appropriate integral sliding mode surface is constructed such that the resultant sliding motion equation system is stochastically stable. The designed observer-based adaptive sliding mode controller can adapt the unknown upper bounds of nonlinearity, and then the reachability of system state trajectories and error trajectories can be satisfied. A sufficient condition of stochastic stability of the closed-loop system can be achieved by using the technique of linear matrix inequality (LMI). Finally, a numerical example is shown to validate the effectiveness of the proposed control scheme.
The organization of this paper is given as follows. The main problems are formulated in Sect. 2. In Sect. 3, an observer with \(H_{\infty }\) performance and integral sliding mode surface is presented and Sect. 4 presents an adaptive sliding mode controller. Section 5 presents a numerical example to prove the feasibility of the mentioned method, and Sect. 6 concludes this paper.
Notations: The superscript “T” represents the matrix transposition. \(\mathbb {R}^{n}\) shows the n -dimensional Euclidean space. A matrix \(X>0\) means that X is real symmetric and positive definite. \(\left\| \cdot \right\| _{1}\) and \( \left\| \cdot \right\| \) refer to the 1-norm and usual Euclidean vector norm, respectively. The notation (\(\varOmega ,\mathcal {F},\mathcal {P}\)) denotes the probability space. \(\varOmega \), \(\mathcal {F}\) and \(\mathcal {P}\) represent the sample space, \(\sigma \)-algebra of subsets of the sample space and probability measure on \(\mathcal {F}\), respectively. \(L_{2}[0,\infty ) \) stands for the space of square integral vector functions. \(\mathbf {E}\{\cdot \}\) indicates the mathematical expectation operator on the given probability \(\mathcal {P}\). The symbol “\(*\)” denotes a term induced by symmetry.
2 Problem Formulation
Let \(\{r_{t},\) \(t\ge 0\}\) be a right-continuous Markov process taking values in the finite discrete space \(S=\{1,2,\ldots ,s\}\) with generator \( \varPi =(\pi _{ij})\) (i, \(j\in S)\) given by
where \(\bigtriangleup t>0\) and \(\lim _{\bigtriangleup t\rightarrow 0}\frac{ o(\bigtriangleup t)}{\bigtriangleup t}=0.\) \(\pi _{ij}\) is the transition rate from mode i to j if \(i\ne j\) and \(\pi _{ii}=-\sum _{j\ne i}\pi _{ij}\). Consider a class of uncertain neutral MJSs with nonlinearity on a complete probability (\(\varOmega ,\mathcal {F},\mathcal {P}\)) as follows:
where \(x(t)\in \mathbb {R}^{n}\) denotes the state vector, \(u(t)\in \mathbb {R}^{m}\) denotes control input, \(y(t)\in \mathbb {R}^{p}\) denotes measured output, \( f(x,t)\in \mathbb {R}^{m}\) and \(d(t)\in \mathbb {R}^{m}\) indicate nonlinearity and external disturbance, respectively. \(\phi (t,r_{0})\) is an initial vector-valued continuous function, which is defined in the interval \(\left[ - \bar{d},0\right] \). \(A(r_{t})\in \mathbb {R}^{n\times n},\) \(A_{d}(r_{t})\in \mathbb {R}^{n\times n},\) \(B\in \mathbb {R}^{n\times m},\) \(C(r_{t})\in \mathbb { R}^{p\times n}\) and \(D\in \mathbb {R}^{n\times n}\) are constant system matrices with appropriate dimensions. \(\bigtriangleup A(r_{t},t)\) and \( \bigtriangleup A_{d}(r_{t},t)\) are parameter uncertainties. \(\tau \) and d denote the constant time delay. Besides, \(\bar{d}=\max \{\tau ,d\}\) and the input matrix B has full column rank in this paper. For notional simplicity, when the uncertain neutral MJSs operate in the i-th mode, system (2) can be rewritten as
where \(A(r_{t})\), \(\bigtriangleup A(r_{t},t)\), \(A_{d}(r_{t})\), \( \bigtriangleup A_{d}(r_{t},t)\) and \(C(r_{t})\) are denoted by \(A_{i}\), \( \bigtriangleup A_{i}(t)\), \(A_{di}\), \(\bigtriangleup A_{di}(t)\) and \(C_{i}\), respectively.
In the following, we define the two operators as follows:
We assume that the admissible uncertainties
where \(M_{i}\), \(N_{i}\) and \(N_{di}\) are the real constant matrices with appropriate dimensions, and \(F_{i}(t)\) is an unknown time-varying matrix function satisfying
The following definitions, assumption and lemmas are necessary in this paper.
Definition 1
[26] Let \(V(x(t), r_{t}, t\ge 0)=V(x(t), i)\) be a stochastic positive functional candidate, which has twice differentiable on x(t). Define its infinitesimal operator \(\mathcal {L}V(x(t), i)\) as
Definition 2
[33] For the closed-loop system with \(u(t)=0\), the equilibrium point 0 is stochastically stable, if for any x(0) and \(i\in S\)
Assumption 1
The nonlinear function f(x, t) satisfies
where \(\alpha >0\) and \(\beta >0\) are unknown constants.
Lemma 1
[10] (Schur complement) Let symmetric matrices W, R and S with appropriate dimensions, then \(R<0\), \(W-S^{T}R^{-1}S<0\) is equivalent to
Lemma 2
[10] Let \(E\in \mathbb {R} ^{n}\), \(G\in \mathbb {R} ^{n}\) and a positive scalar \(\varepsilon .\) Then we have \(E^{T}G+G^{T}E\le \varepsilon G^{T}G+\varepsilon ^{-1}E^{T}E.\)
3 Observer-Based Sliding Mode Control
In practice, the bounds of the nonlinearity are generally not available. This means that the two unknown constant parameters \(\alpha \) and \( \beta \) are estimated by \(\hat{\alpha }(t)\) and \(\hat{\beta }(t)\), respectively. The estimation error of each parameter is defined as \(\tilde{ \alpha }(t)=\hat{\alpha }(t)-\alpha \), \(\tilde{\beta }(t)=\hat{\beta }(t)-\beta \) , respectively. Our purpose is to design a state observer to estimate unmeasured state components for the uncertain neutral MJSs (3) such that the resultant closed-loop system is stochastically stable despite the presence of uncertainties, Markovian switching and external disturbance.
3.1 Observer Design
In this subsection, we design a state observer of the controlled plant (3),
where \(L_{i}\in \mathbb {R} ^{n\times p}\) is the observer gain to be designed and \(\hat{x}(t)\) represents the estimation of x(t). The robust control term \(u_{s}(t)\) is designed to remove the impact of the unknown nonlinear term. In the following derivations, assume \(S_{e}(t)=B^{T}X_{i}\mathcal {D}\left( e_{t}\right) \). Besides, it is assumed that the positive symmetric matrix \(X_{i}\) satisfies the constraint
The robust control term \(u_{s}(t)\) is designed as
with the adaptive laws
where \(\epsilon \) is a small positive constant, \(c_{\alpha }\) and \( c_{\beta }\) are positive constants chosen by the designer. Define the error \( e(t)=x(t)-\hat{x}(t),\) and then the estimation error dynamics is derived from (3) subtracting (9) as:
where \(y_{e}(t)\) denotes the output of the error system. Now we introduce the \(H_{\infty }\) performance index as follows:
The performance \(J<0\) is converted into the following condition:
3.2 Sliding Mode Surface Design
Define the integral sliding mode surface in the state-estimate space as follows:
where \(F\in \mathbb {R} ^{m\times n}\) is a given constant matrix and \(K_{i}\in \mathbb {R} ^{m\times n}\) is a coefficient matrix, which is designed such that \( A_{i}+BK_{i}\) is Hurwitz and FB is positive definite symmetric matrix and nonsingular.
Remark 1
Note that the linear term \(F\hat{x}(t)\) is continuous in integral sliding mode surface (16). Moreover, although \(F(A_{i} + BK_{i})\) is switching in different mode i, the integral term \(F\int _{0}^{t}(A_{i}+BK_{i})x(s)ds\) is still continuous in the jump point. Then, the pre-defined integral sliding mode surface is continuous when the uncertain neutral MJSs states switch.
To obtain the sliding mode dynamics of system (3), we utilize the equivalent control method in the following. Taking the derivative of S(t), we have
From \(\dot{S}(t)=0\), we obtain the following equivalent control law
Substituting the equivalent control law (18) into observer (9 ), the sliding mode dynamics can be obtained as follows:
where \(\bar{B}=I-B(FB)^{-1}F\). Thus, the stochastic stability of the overall closed-loop system composed of (13) and (19) will be analyzed in the following theorem.
3.3 Analysis of Stochastic Stability
A sufficient condition of stochastic stability of the resulting closed-loop system composed of (13) and (19) with Markovian parameters, and a disturbance attenuation level is given in the following theorem.
Theorem 1
Consider the overall closed-loop system composed of estimation error dynamics (13) and sliding mode dynamics (19), given a scalar \(\gamma >0\), the integral sliding mode surface is given by (16). If there exist matrices \(X_{i}\in \mathbb {R} ^{n\times n}>0\), \(P_{1}\in \mathbb {R}^{n\times n}>0,\) \(P_{2}\in \mathbb {R} ^{n\times n}>0\), \(Q_{1}\in \mathbb {R}^{n\times n}>0\), \(Q_{2}\in \mathbb {R} ^{n\times n}>0\), \(Y_{i}\in \mathbb {R}^{n\times p}\) and scalars \(\varepsilon _{il}\) \((l=1,2,3,4)\) for any \(i\in S\) such that the following LMIs and equality constraint hold,
where
Moreover, the observer gain can be obtained as
and then the system (3) with Markovian parameters is stochastically stable under observer (9) and integral sliding mode surface (16) with a disturbance attenuation level \( \gamma .\)
Proof
Choose the Lyapunov functional of each subsystem as follows:
Then, based on Definition 1, we take the time derivative of Lyapunov functional \(V_{1}(i,t)\) along the trajectories of sliding mode dynamics and state error dynamics with \(d(t)=0\) as follows:
Using Lemma 2 and Assumption 1, it follows from (24) that
Substituting (25)–(30) into (24), one can obtain:
where \(\eta ^{T}(t)=\left[ \begin{array}{cccccc} \mathcal {D}^{T}\left( e_{t}\right)&e^{T}(t-\tau )&e^{T}(t-d)&\mathcal { \bar{D}}^{T}\left( \hat{x}_{t}\right)&\hat{x}^{T}(t-\tau )&\hat{x} ^{T}(t-d) \end{array} \right] ^{T}\), and
where
It can be seen that LMIs (20) are obtained if the condition \(\varPhi _{i}<0\) holds by Lemma 1. Then \(\mathcal {L}{V}_{1}(i,t)<0\) for \(\forall \eta (t)\ne 0\). The resulting closed-loop system with \(d(t)=0\) is stochastically stable by the above proof.
In the following, we will demonstrate that the uncertain neutral MJSs (3) with Markovian parameters are stochastically stable under the observer (9) and the integral sliding mode surface (16) with a disturbance attenuation level \(\gamma ,\) that is to say, external disturbance \(d(t)\ne 0.\) Then, the stochastic Lyapunov functional \({V} _{1}(i,t)\) as in (23). Thus
According to the above proof and \(\mathbf {E}{V}_{1}(i,t)=\mathbf {E} \int _{0}^{\infty }\mathcal {L}{V}_{1}(i,t)dt>0\), for \(d(t)\in L_{2}[0,\infty ) \), the system performance J can be converted into
where \(\xi ^{T}(t)=\Big [ \mathcal {D}^{T}\left( e_{t}\right) \, e^{T}(t-\tau ) \, e^{T}(t-d) \, \mathcal { \bar{D}}^{T}\left( \hat{x}_{t}\right) \, \hat{x}^{T}(t-\tau ) \, \hat{x} ^{T}(t-d) \, d^{T}(t) \Big ] ^{T}.\)
By utilizing Lemma 1 and LMIs (20), it is straightforward that \(\varXi _{i}<0,\) which implies that \(J<0\). Thus, it results in
Notice that the linear equality condition (21) is equivalent to
We introduce the condition
where \(\sigma >0\) is a parameter to be designed. Then, by Lemma 1, we have
Hence, the observer-based adaptive SMC problem is changed to the following minimization problem:
Then the resulting closed-loop system composed of (13) and (19) is stochastically stable with a disturbance attenuation level \(\gamma \). This completes the proof.
Remark 2
It should be noted that (36) is a minimization problem with linear objective and LMIs constraints, and it admits a global infimum. Then, the observed-based adaptive SMC problem can be solved if this infimum equals zero.
4 Adaptive Sliding Mode Controller Design
In this section, an adaptive SMC law will be designed to guarantee the reachability of state trajectories of the system (3) such that it can start sliding motion. The state trajectories of system (3) can be driven onto the designed integral sliding mode surface \(S(t)=0\) in finite time.
Theorem 2
For any \(i\in S\), suppose that there exists positive definite symmetric matrix \(X_{i}\) such that Theorem 1 holds, thus, the reachability of state trajectories of the uncertain neutral MJSs (3) can be guaranteed by synthesizing the following adaptive SMC law
where the above two adaptive gains are designed as in (12), \(l_{i}\) is a small positive constant and \(\delta _{i}(t)\) satisfies
The synthesized adaptive SMC law (37) can not only drive the state trajectories of the uncertain neutral MJSs (3) onto the integral sliding mode surface (16) but also keep them on the integral sliding mode surface for all subsequent time.
Proof
Choose the following Lyapunov functional
Then, along with the solution to sliding mode dynamics (19), we have
Substituting (37) into (39), we have
Noting that \(S^{T}(t)\hbox {sgn}(S_{e}(t))\le \left\| S(t)\right\| _{1}.\) Then, (40) can be simplified as
Therefore, (39) can be transformed to the following form
Define \(\varTheta _{i}=\left\| (FB)^{-1}FL_{i}C_{i}\right\| ,\) then it can be shown from (41) that,
Thus, we have
From (42), it is straightforward that \(\mathcal {L}V_{2}(t)\le -l_{i}\left\| S(t)\right\| ^{2}<0\) (\(\forall \left\| S(t)\right\| \ne 0\)). Therefore, the state trajectories of the uncertain neutral MJSs (3) can be attained onto the integral sliding mode surface S(t) under the adaptive SMC law (37) in finite time. The proof is finished.
Remark 3
When the system is in mode i, the system state trajectories will be attracted to the i-th integral sliding mode surface (16) due to the fact that the system switching method is determined by a Markov process. If system mode i \((i\ne j)\) switches to another mode j before the system state trajectories reach the i-th sliding mode surface, then the system state still can be attracted to the j-th integral sliding mode surface since the integral sliding mode surface is always continuous (see Remark 1), which implies that the system state will be driven onto any sliding mode function. Thus, when the system state reaches onto the defined integral sliding mode surface, the state will reach within one sliding mode surface all the subsequent time.
If \(D=0\), the uncertain neutral MJSs (3) with Markovian switching parameters and unknown nonlinear function become uncertain time-delay systems such that state observer, state estimation error dynamics and sliding mode dynamics have the same forms as (9), (13) and (19) with \(D=0\), respectively, for the uncertain time-delay systems. So, based on Theorem 2, we have the following result for the uncertain time-delay systems.
The overall closed-loop uncertain time-delay MJSs (i.e., system 9 and 13 with \(D=0\)) are stochastically stable with a disturbance attenuation level \(\gamma ,\) if there exist \( X_{i}>0\), \(P_{2}>0\), \(Q_{2}>0\) and scalars \(\varepsilon _{il}\) \((l=1,2,3,4)\) for any \(i\in S\) such that the following LMIs and equality constraint hold,
where
Moreover, the state observer gain can be then obtained by \( L_{i}=X_{i}^{-1}Y_{i}\).
Proof
The proof of this corollary is very similar to the techniques used in Theorem 1. It is omitted.
Remark 4
It is noted that there are few results on the robust adaptive SMC of networked systems, fuzzy systems and switched systems with Markovian parameters. Besides, the proposed approaches in this paper can be also applied to the networked systems, fuzzy systems and switched systems with Markovian parameters which have been studied in [12–16, 19–22, 27, 32, 35–37, 50, 51]. Thus, in future work, it is worth studying the research topic.
5 A Numerical Example
In this section, a numerical example is provided to demonstrate the feasibility of the presented method. The parameter matrices of uncertain neutral MJSs (2) with two subsystems are given as follows:
We select the coefficient matrices \(K_{1}\) and \(K_{2}\) as
The time-varying matrix function \(F_{i}(t)\) \((i=1,2),\) the nonlinear function f(x, t) and the external disturbance d(t) of two subsystems are given, respectively, as follows:
Then the constant matrix F and probabilities transition matrix \(\varPi ,\) respectively, are given as
The initial states of original system (2) and state observer (9), respectively, are set as \(x(t)=\left[ \begin{array}{c@{\quad }c@{\quad }c} 0.5&-0.5&0.2 \end{array} \right] ^{T}\) and \(\hat{x}(t)=\left[ \begin{array}{c@{\quad }c@{\quad }c} 0.2&-0.1&0.1 \end{array} \right] ^{T}\) for \(t\in [-4,0]\). The parameters of the adaptive laws are selected as \(\hat{\alpha }(0)=0.027\) and \(\hat{\beta }(0)=0.012,\) and \( c_{\alpha }=0.75\), \(c_{\beta }=2.5.\) The adaptive SMC law is designed in (37) with \(l_{1}=0.85,\) \(l_{2}=0.80,\) and \(\epsilon =1.\) The constant time delays \(\tau \) and d are chosen as \(\tau =4\) and \(d=2.5\), respectively. The minimum disturbance attenuation \(\gamma =1.3256.\) To restrain the control signals from chattering, we replace \(\hbox {sgn}(S(t))\) and \( \hbox {sgn}(S_{e}(t))\) with \(\frac{S(t)}{\left\| S(t)\right\| +0.02}\) and \(\frac{S_{e}(t)}{\left\| S_{e}(t)\right\| +0.02},\) respectively. By solving the LMIs in (36), we have

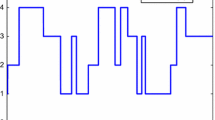
Trajectory of r(t)

State estimation error e(t)

State estimation responses of the uncertain neutral MJSs

The trajectory of integral sliding mode surface S(t)

Estimation \(\hat{\alpha }(t)\)

Estimation \(\hat{\beta }(t)\)
Besides, the integral sliding mode function can be computed as
The simulation results are provided in Figs. 1, 2, 3, 4, 5 and 6. Figure 1 shows the switching signal r(t), and Fig. 2 plots the state responses of the error estimation system under adaptive SMC law (37). The state estimation responses and the integral sliding mode surface are shown in Figs. 3, 4. Figures 5, 6 depict the estimated values \(\hat{\alpha }(t)\) and \(\hat{\beta }(t)\), respectively. It can be seen from Figs. 5, 6 that \(\hat{ \alpha }(t)\) and \(\hat{\beta }(t)\) are bounded and the trajectories of e(t) are convergent, which can demonstrate the validity of the proposed method.
6 Conclusion
The problem of robust adaptive SMC for uncertain neutral MJSs with unknown nonlinearity and unmeasured states has been investigated in this paper. The upper bounds of the nonlinear term are unknown for control design in this study. An appropriate integral sliding mode surface has been constructed such that the reduced-order equivalent sliding motion can adjust the effect of the chattering phenomenon in the plant. A sufficient condition of stochastic stability of the overall closed-loop system can be achieved in terms of LMIs based on SMC strategy. Finally, a numerical example has illustrated the effectiveness of the proposed scheme.
References
M. Basin, A. Ferreira, L. Fridman, Sliding mode identification and control for linear uncertain stochastic systems. Int. J. Syst. Sci. 38(11), 861–869 (2007)
M. Basin, J. Rodriguez-Gonzalez, L. Fridman, P. Acosta, Integral sliding mode design for robust filtering and control of linear stochastic time-delay systems. Int. J. Robust Nonlinear 15(9), 407–421 (2005)
M. Basin, P. Rodriguez-Ramirez, Sliding mode filter design for nonlinear polynomial systems with unmeasured states. Inf. Sci. 204, 82–91 (2012)
B. Chen, Y. Niu, Y. Zou, Adaptive sliding mode control for stochastic Markovian jumping systems with actuator degradation. Automatica 49(6), 1748–1754 (2013)
Y. Chen, W.X. Zheng, Exponential \({H}_{\infty }\) filtering for stochastic Markovian jump systems with time delays. Int. J. Robust Nonlinear 24(4), 625–643 (2014)
Y. Chen, W.X. Zheng, \({L}_{2}-{L}_{\infty }\) filtering for stochastic Markovian jump delay systems with nonlinear perturbations. Signal Process. 109, 154–164 (2015)
S. Di Gennaro, J. Rivera Dominguez, M.A. Meza, Sensorless high order sliding mode control of induction motors with core loss. IEEE Trans. Ind. Electron. 61(6), 2678–2689 (2014)
S. Ding, J. Wang, W.X. Zheng, Second-order sliding mode control for nonlinear uncertain systems bounded by positive functions. IEEE Trans. Ind. Electron. 62(9), 5899–5909 (2015)
Y. Kao, W. Li, C. Wang, Nonfragile observer-based \(H_{\infty }\) sliding mode control for Itô stochastic systems with Markovian switching. Int. J. Robust Nonlinear 24(15), 2035–2047 (2014)
Y. Kao, J. Xie, C. Wang, H.R. Karimi, A sliding mode approach to \(H_{\infty }\) non-fragile observer-based control design for uncertain Markovian neutral-type stochastic systems. Automatica 52, 218–226 (2015)
H.R. Karimi, A sliding mode approach to \( H_{\infty }\) synchronization of master-slave time-delay systems with Markovian jumping parameters and nonlinear uncertainties. J. Franklin Inst. 349(4), 1480–1496 (2012)
H. Li, S. Yin, Y. Pan, H.K. Lam. Model reduction for interval type-2 Takagi-Sugeno fuzzy systems, Automatica. doi:10.1016/j.automatica.2015.08.020
H. Li, C. Wu, P. Shi, Y. Gao. Control of nonlinear networked systems with packet dropouts: interval type-2 fuzzy model-based approach, IEEE Trans. Cybern. doi:10.1109/TCYB.2014.2371814
H. Li, C. Wu, L Wu, L., & Lam, H. K. Filtering of interval type-2 fuzzy systems with intermittent measurements, IEEE Trans. Cybern. doi:10.1109/TCYB.2015.2413134
H. Li, X. Sun, L. Wu, H.K. Lam. State and output feedback control of a class of fuzzy systems with mismatched membership functions, IEEE Trans. Fuzzy Syst. doi:10.1109/TFUZZ.2014.2387876
H. Li, Y. Pan, Q. Zhou, Filter design for interval type-2 fuzzy systems with D stability constraints under a unified frame. IEEE Trans. Fuzzy Syst. 23(3), 719–725 (2015)
L. Liu, Z. Han, W. Li, \(H_{\infty }\) non-fragile observer-based sliding mode control for uncertain time-delay systems. J. Franklin Inst. 347(2), 567–576 (2010)
M. Liu, P. Shi, L. Zhang, X. Zhao, Fault-tolerant control for nonlinear Markovian jump systems via proportional and derivative sliding mode observer technique. IEEE Trans. Circuits Syst. I Reg. Papers 58(11), 2755–2764 (2011)
Y.-J. Liu, L. Tang, S. Tong, C. Chen, Adaptive NN controller design for a class of nonlinear MIMO discrete-time systems. IEEE Trans. Neural Netw. Learn. Syst. 26(5), 1007–1018 (2014)
Y.-J. Liu, S. Tong, C. Chen, Adaptive fuzzy control via observer design for uncertain nonlinear systems with unmodeled dynamics. IEEE Trans. Fuzzy Syst. 21(2), 275–288 (2013)
R. Lu, Y. Xu, A. Xue, J. Zheng, Networked control with state reset and quantized measurements: observer-based case. IEEE Trans. Ind. Electron. 60(11), 5206–5213 (2013)
R. Lu, F. Wu, A. Xue, Networked control with reset quantized state based on Bernoulli processing. IEEE Trans. Ind. Electron. 61(9), 4838–4846 (2014)
K. Mathiyalagan, J.H. Park, R. Sakthivel, S.M. Anthoni, Robust mixed \(H_{\infty }\) and passive filtering for networked Markov jump systems with impulses. Signal Process. 101, 162–173 (2014)
K. Mathiyalagan, R. Sakthivel, J.H. Park, Robust reliable control for neutral-type nonlinear systems with time-varying delays. Rep. Math. Phys. 74(2), 181–203 (2014)
X. Mao, Exponential stability of stochastic delay interval systems with Markovian switching. IEEE Trans. Automat. Control 47(10), 1604–1612 (2002)
S.P. Meyn, R.L. Tweedie, Markov Chains and Stochastic Stability (Cambridge University Press, Cambridge, 2009)
J. Napoles, A.J. Watson, J.J. Padilla, J. Leon, L.G. Franquelo, P.W. Wheeler, M.A. Aguirre, Selective harmonic mitigation technique for cascaded H-bridge converters with nonequal DC link voltages. IEEE Trans. Ind. Electron. 60(5), 1963–1971 (2013)
Y. Niu, D.W.C. Ho, Robust observer design for It ô stochastic time-delay systems via sliding mode control. Syst. Control. Lett. 55(10), 781–793 (2006)
Y. Niu, D.W.C. Ho, J. Lam, Robust integral sliding mode control for uncertain stochastic systems with time-varying delay. Automatica 41(5), 873–880 (2005)
R. Rakkiyappan, Q. Zhu, A. Chandrasekar, Stability of stochastic neural networks of neutral type with Markovian jumping parameters: a delay-fractioning approach. J. Franklin Inst. 351(3), 1553–1570 (2014)
Y.-H. Roh, J.-H. Oh, Robust stabilization of uncertain input-delay systems by sliding mode control with delay compensation. Automatica 35(11), 1861–1865 (1999)
E. Romero-Cadaval, G. Spagnuolo, Franquelo L. Garcia, C.-A. Ramos-Paja, T. Suntio, W.M. Xiao, Grid-connected photovoltaic generation plants: components and operation. IEEE Ind. Electron. Mag. 7(3), 6–20 (2013)
P. Shi, Y. Xia, G. Liu, D. Rees, On designing of sliding-mode control for stochastic jump systems. IEEE Trans. Automat. Control 51(1), 97–103 (2006)
R. Sakthivel, R. Raja, S.M. Anthoni, Exponential stability for delayed stochastic bidirectional associative memory neural networks with Markovian jumping and impulses. J. Optim. Theory. Appl. 150(1), 166–187 (2011)
S. Tong, Y. Li, Adaptive fuzzy output feedback tracking backstepping control of strict-feedback nonlinear systems with unknown dead zones. IEEE Trans. Fuzzy Syst. 20(1), 168–180 (2012)
S. Tong, S.-S. Sui, Y. Li. Fuzzy adaptive output feedback control of MIMO nonlinear systems with partial tracking errors constrained, IEEE Trans. Fuzzy Syst. doi:10.1109/TFUZZ.2014.2327987
T. Wang, H. Gao, J. Qiu, A combined adaptive neural network and nonlinear model predictive control for multirate networked industrial process control, IEEE Trans. Neural Netw. Learn. Syst. (2015). doi:10.1109/TNNLS.2015.2411671
L. Wu, C. Wang, H. Gao, L. Zhang, Sliding mode \(H_{\infty }\) control for a class of uncertain nonlinear state-delayed systems. J. Syst. Eng. Electron. 17(3), 576–585 (2006)
L. Wu, X. Yao, W.X. Zheng, Generalized \({H} _2\) fault detection for two-dimensional Markovian jump systems. Automatica 48(8), 1741–1750 (2012)
L. Wu, X. Su, P. Shi, Sliding mode control with bounded \(L_{2}\) gain performance of Markovian jump singular time-delay systems. Automatica 48(8), 1929–1933 (2012)
L. Wu, P. Shi, H. Gao, C. Wang, \(H_{\infty }\) filtering for 2D Markovian jump systems. Automatica 44(7), 1849–1858 (2008)
L. Wu, D.W.C. Ho, W.L. Chun, Sliding mode control of switched hybrid systems with stochastic perturbation. Syst. Control. Lett. 60(8), 531–539 (2011)
L. Xiong, J. Tian, X. Liu, Stability analysis for neutral Markovian jump systems with partially unknown transition probabilities. J. Franklin Inst. 349(6), 2193–2214 (2012)
S. Xu, J. Lam, X. Mao, Delay-dependent \( H_{\infty } \) control and filtering for uncertain Markovian jump systems with time-varying delays. IEEE Trans. Circuits Syst. I Reg. Papers. 54(9), 2070–2077 (2007)
H. Yang, Y. Xia, P. Shi, Observer-based sliding mode control for a class of discrete systems via delta operator approach. J. Franklin Inst. 347(7), 1199–1213 (2010)
J. Yu, M. Tan, J. Chen, Jianwei Zhang, A survey on CPG-inspired control models and system implementation. IEEE Trans. Neural Netw. Learn. Syst. 25(3), 441–456 (2014)
J. Yu, R. Ding, Q. Yang, M. Tan, W. Wang, J. Zhang, On a bio-inspired amphibious robot capable of multimodal motion. IEEE/ASME Trans. Mech. 17(5), 847–856 (2012)
L. Zhang, H. Gao, Asynchronously switched control of switched linear systems with average dwell time. Automatica 46(5), 953–958 (2010)
L. Zhang, P. Shi, \(l_{2}-l_{\infty }\) Model reduction for switched LPV systems with average dwell time. IEEE Trans. Automat. Control 53(10), 2443–2448 (2008)
X. Zhao, P. Shi, X. Zheng, L. Zhang, Adaptive tracking control for switched stochastic nonlinear systems with unknown actuator dead-zone. Automatica 60, 193–200 (2015)
X. Zhao, X. Zheng, B. Niu, L. Liu, Adaptive tracking control for a class of uncertain switched nonlinear systems. Automatica 52, 185–191 (2015)
Acknowledgments
This work was partially supported by the National Natural Science Foundation of China (61473096, 61573070), the Program for New Century Excellent Talents in University (NCET-13-0170, NCET-13-0696), the Program for Liaoning Innovative Research Team in University (LT2013023), the Program for Liaoning Excellent Talents in University (LR2013053, LJQ20141126) and the Special Chinese National Postdoctoral Science Foundation (2015T80262). The authors wish to gratefully acknowledge the help of Dr. Madeleine Strong Cincotta in the final language editing of this paper.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Yao, D., Liu, M., Li, H. et al. Robust Adaptive Sliding Mode Control for Nonlinear Uncertain Neutral Markovian Jump Systems. Circuits Syst Signal Process 35, 2741–2761 (2016). https://doi.org/10.1007/s00034-015-0171-9
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00034-015-0171-9