
Abstract
The present study investigates the free vibration analysis of functionally graded material (FGM) beam which is rectangular in cross section with linearly varying thickness along its axis with the help of finite element formulation. This formulation of finite element is developed based on the Timoshenko beam theory which we called as first-order shear deformation theory. In the present analysis of the beam with linearly varying thickness, the beam element has five nodes and thirteen degrees of freedom. Properties of the material used in this beam element are varying continuously according to the power law along the thickness direction. Governing equations used for the formulation of present work are derived from Lagrange’s equations. The natural frequency of beam is calculated using different boundary conditions, exponents of power law, depth to span ratios, and tapered ratios. The present beam element is accurately demonstrated by comparing the results with the available data of publications for constant thickness and for variable thickness, and some results are new and can be further considered for future researches.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
Functionally graded materials (FGMs) have superior composites of continuous spatial variables formed with the help of two or more material constituents. These materials are used to build a mixture of two or more constituents whose particles have nearly similar form and dimensions (ceramic powder, plasma particles, etc.). These materials have excellent properties such as high temperature, creep, and fatigue resistance. Therefore, these materials are extensively used in many engineering applications, i.e., aerospace, civil, and mechanical engineering, etc. The increasing demand for these materials is because of their good mechanical behavior in various applications.
When we compare the researches of plates and shells, the work on FGM beams are very less and very few data are available. Free vibration problems of functionally graded beams (FGB) were solved by different analytical and numerical approaches using different beam theories. Among many analytical works, some may be mentioned in this context. In the last of the twentieth century, many researchers have done their works on free vibration analysis of FGM beams with different boundary conditions and loading conditions [1,2,3,4,5]. In the area of sandwiched beams, Frostig et al. [6] investigated the higher-order theory for sandwiched beams behavior with transverse core and they investigated that how the shear is transferred from the core to the skin. Later on, Sankar et al. [7] obtained the solution for elasticity problem using FG beams with simply supported conditions exposed to transverse loading of sinusoidal behavior and the modulus of elasticity varies along the thickness in the exponential manner, and Sankar found when the loaded side of the beam is softer as compared to homogeneous beam, the concentration of stresses are less, and vice versa when the harder side is loaded.
In the field of thermal stress, Xiang and Yang [8] examined the frequencies of thermally pre-stressed, laminated FG beam with variable thickness using the first-order beam theory and the method of differential quadrature. This analysis shows that if the layers of FGM are thicker with a lesser fractional index of volume in the laminated beam, structure shows the effective increases in natural frequencies and decrease in the amplitude of vibration. And after the analysis of Xiang and Yang, characteristics of free vibration and the behavior of dynamic analysis of a FG beam with simply supported ends under a concentrated moving harmonic load are studied by Simsek and Kocaturk [9]. In this study, Lagrange’s equations are used for deriving the equation of motion under the assumptions of beam theory given by Euler–Bernoulli. This analysis says that the different material distribution effect, moving harmonic load velocity, and the dynamic responses of excitation frequency on the FG beam show very vital role in the dynamic response of the FG beam. Later on, Li et al. [10] investigated the FG beams by taking into account the effects of shear deformation and deriving a single governing equation for the static and dynamic behaviors of FG beams. The results obtained from the analysis are coinciding with the standard elasticity solutions. In the analysis of mode shape and fundamental frequencies of FGM beams, Alshorbagy et al. [11] studied the free vibration features and dynamic response of a functionally graded beam for various distributions of material using FEM. The obtained results have shown that the distributed variation of material along the axial direction and the ratio of slenderness have not executed any effect on the fundamental frequencies or mode shapes but as the power exponent increases the natural frequencies also increases. Alshorbagy et al. [12] also examined the dynamic behavior of FGM thick beam by analyzing the effect of temperature.
In the area of isotropic and functionally graded (FG) sandwich beams, Nguyen et al. [13] proposed a new higher-order shear deformation theory for buckling and free vibration analysis. This study shows a new hyperbolic variation of shear stress in transverse direction, and the results obtained from this theory show outstanding promise with those derived from former studies. After that, Kahya et al. [14] studied multi-layered shear deformable beam element for dynamic analysis of laminated composite beams subjected to moving load. In this investigation, results show very significant responsive evaluation of the stacking lamina of the laminated beams. After two years, Kahya et al. [15] also examined one more result on the model of finite element for vibration and buckling analysis of FGM beam based on first-order shear deformation theory using a five-noded beam element with ten degrees of freedom.
Recently, Banerjee et al. [16] investigated the free vibration of FGBs by applying the dynamic stiffness method in this analysis properties of the material alter continuously over the thickness according to the variation of power law. After that, Armagan et al. [17] analyzed free vibration behavior of two-directional FG beams subjected to different boundary conditions by using the shear deformation theory of third order where the properties of materials of the beam vary exponentially in length as well as thickness directions. In the area of nonlinear free and forced vibrations, Sinir and Gultekin [18] have done his analysis on non-uniform cross-sectional beam of axially functionally graded material with Euler–Bernoulli theory. The beam has immovable boundary conditions, which leads to mid-plane stretching because of vibrations and the frequency-response curves that show the effect of these nonlinear correction terms on natural frequency by the unstable regions. And very recently, Chen et al. [19] investigated the vibration problem of axially functionally FGM beam and parabolically varying thickness in 3D by isogeometric analysis in conjunction with 3D theory.
From the available works of literature, it has been seen that most of the works have been done using different beam elements for the fundamental frequency only. In the present work, a beam element with five nodes having thirteen degrees of freedom is used for the analysis of free vibration of the functionally graded beams with a variable thickness along its length. In this work, the first-order shear deformation theory has been taken into account for finite element formulation.
2 Theory and Formulation
The purpose of this study is to develop an exact finite element model with the help of shear deformation theory of first order for free vibration analysis of functionally graded beams (FGB) with variable thickness. The properties of materials in the beam vary continuously through the direction of thickness according to the formulation of power law.
2.1 Material Properties
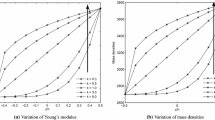
The beam proposed here is an isotropic, non-homogeneous elastic beam having its length l and cross section is \( b \times h_{g} \) which is rectangular in shape where the thickness of the beam is varying linearly along its length as shown in Fig. 1 and \( h_{g} \) is the thickness at Gauss’s point. The beam is constituted with a mixture of two materials such as ceramic and metal, the position of these materials is at its top and bottom surfaces, respectively. Hooke’s law is obeyed by the material. Power law rule governs the variation of material properties along with the thickness as follows.

Variable thickness cross section of beam element
where k is the non-negative exponent of the power law, \( P_{\text{m}} \) and \( P_{\text{c}} \) are the equivalent properties of the metal and ceramic ingredients, e.g., Young’s modulus E, Poisson Ratio \( \nu \), and mass density \( \rho \), respectively.
2.2 Finite Element Formulation
Figure 2 shows the five-node beam element with thirteen degrees of freedom with each node having three degrees of freedom except the mid node. And only the mid node has one degree of freedom.

Beam element with five nodes and thirteen degrees of freedom
Displacement field equation according to the first-order shear deformation theory is as follows:
where u is axial displacement, w is transverse displacement, and \( \phi \) is the total bending rotation of the cross section at any point on the neutral axis.
From Eq. (1), the relationship of strain–displacement is as follows:
where \( \varepsilon_{xx} \) and \( \gamma_{xz} \) are the normal and shear strains, respectively, and Eq. (2) can be rewritten as:
where
where \( \left\{ \delta \right\}^{\text{T}} = \left\{ {u_{1 } w_{1 } \phi_{1} u_{2} w_{2} \phi_{2} w_{3} u_{4} w_{4} \phi_{4} u_{5} w_{5} \phi_{5} } \right\} \)
and “x” represents the derivative with respect to x.
The shape functions in \( \left[ B \right] \) are as follows:
where \( \xi = \frac{x}{L} \) and \( 2L \) is the element length.
The thickness of the beam varying linearly from one end as shown in Fig. 1, the variation of thickness at any distance “x” from one end \( \left( {x = 0} \right) \) is given by
Or,\( t_{x} = t_{0} \left[ {1 + \left( {1 - \frac{x}{l}} \right)\delta } \right] \), where \( \delta = \frac{{t_{1} - t_{0} }}{{t_{0} }} \) (tapered ratio), \( t_{0} \) is the thickness at one end \( \left( {x = l} \right) \) and \( t_{1} \) at the other end \( \left( {x = 0} \right) \), and x is measured from the end where the thickness is \( t_{1} \).
The element stiffness matrix can be written using the principle of virtual work as follows:
where \( \left[ B \right] = \frac{1}{J}\frac{{{\text{d}}[N] }}{{{\text{d}}\xi }} \) or \( \frac{{{\text{d}}N_{i} }}{{{\text{d}}x}} = \frac{{{\text{d}}N_{i} }}{{{\text{d}}\xi }} \times \frac{{{\text{d}}\xi }}{{{\text{d}}x}} \).
Again, on considering the beam element used in the present analysis we get,
where \( N_{1x} = 1/2\left( { - \xi + \xi^{2} } \right) \)), \( N_{3x} = (1 - \xi^{2} \)), and \( N_{5x} = 1/2\left( {\xi + \xi^{2} } \right) \). Total length of the beam element is \( 2L \). The abscissa of the nodes of the beam elements \( x_{1} \), \( x_{3} , \) and \( x_{5 } \) for geometric interpolation is as follows:
On putting the above values of \( x_{1} \), \( x_{3} \), and \( x_{5 } \) in Eq. (7) we get J as follows
Total length of the beam element is \( 2L \). Hence,\( x_{5} - x_{1} = 2{\text{L}} \) or
Therefore, using Eqs. (6), (7), and (8), the elemental stiffness matrix can be given as
The rigidity matrix \( \left[ D \right] \) is given as:
where \( A_{0} \), \( A_{1} ,A_{2} \), and \( B_{0} \) can be expressed as follows:
It has been assumed that mechanical property of Young’s modulus is varying along with the thickness of the beam element. This Young’s modulus variation along the thickness of the beam is governed by the power law which is as follows:
where \( \nu \) is taken as constant for the functionally graded material.
Therefore, putting the above relationship in the expression \( \left[ {A_{0} ,A_{1} ,A_{2} } \right] \) and \( B_{0} \) and taking the integration over the whole thickness of the beam, \( A_{0} ,A_{1} ,A_{2} , \) and \( B_{0} \) are obtained as:
where \( h_{g} \) is the total thickness of the beam at Gauss points of integration. Similarly, the element mass matrix can be written as
where \( I_{0} \),\( I_{1} , \) and \( I_{2} \) can be expressed as follows:
It has been assumed that densities are varying along with the thickness in the present beam element. This variation of density along the beam thickness is governed by power law which is as follows:
Combining Eqs. (12), (13), and (14) and taking integral over the thickness of the beam \( I_{0} , I_{1} , \;{\text{and}}\;I_{2} \) are expressed as follows:
Gauss quadrature method is used to find the element stiffness and mass matrices from Eqs. (9) and (12) numerically, and the Gauss quadrature order used is four.
By assembling the element stiffness and mass matrices, following Eigenvalue equation is obtained:
where \( \left[ K \right]_{\text{g}} \) and \( \left[ M \right]_{\text{g}} \) are the global stiffness and global mass matrices, \( \omega \) is the natural frequency, and \( \left\{\Delta \right\} \) is the corresponding mode shape. Equation (16) is solved by using the simultaneous iteration technique by Corr and Jennings [20] to obtain the natural frequencies of the beam.
3 Results and Discussion
In the present analysis, formulation of finite element model is used based on the shear deformation theory of the first order for the study of free vibration analysis of functionally graded beams with linearly varying thickness along its length.
The study of convergent is approved for the present beam element. Table 1 shows the normalized fundamental frequencies \( \left( {\overline{\omega }_{n} = \frac{{\omega_{n} l^{2} }}{{h_{0} }}\sqrt {\frac{{\rho_{m} }}{{E_{m} }}} } \right) \) of FGBs with various boundary conditions for their different values, where the length of beam is l and the thickness is \( h_{0} \) at \( x = l \). For the comparison of present work with those of Kahya [15] and Nguyen [13], the material used in this FG beam is aluminum (Al) as metal and alumina (Al2O3) as ceramic for which \( Em = 70\;{\text{GPa}} \), \( \rho_{\text{m}} = 2702\;{\text{kg}}/{\text{m}}^{3} \), \( \nu_{\text{m}} = 0.3 \), \( Ec = 380\;{\text{GPa}} \), \( \rho_{\text{c}} = 3960\;{\text{kg}}/{\text{m}}^{3} \), and \( \nu_{\text{c}} = 0.3 \). Boundary conditions for this analysis are assumed to be clamped-clamped (C–C), hinged-hinged (H–H), and clamped-free (C–F). For calculation, the shear-correction factor is taken as \( K = 5\left( {1 + \nu } \right)/\left( {6 + 5\nu } \right) \) from the work of Kahya [15] where \( \upsilon \) is Poisson’s ratio. In all of the following calculations, rectangular cross-sectional beam having different length-to-thickness ratio \( \left( {l/h_{0} } \right) \) ranging from 5 to 100 and different values of power law exponent \( \left( k \right) \) varying from 0 to 10 has been considered. The normalized fundamental frequencies for different values of power law exponent, boundary conditions, and different tapered ratios \( \left( {\delta = 0, 0.25, 0.50, 0.75, 1.0} \right) \) obtained from the present analysis are shown in Table 3. For the value of \( \delta = 0 \), it has been experiential that, the obtained results are very close 0.8–1.2% less than the available published results by Simsek [4], Nguyen [13] and Kahya [15] as shown in Table 2 and the results are shown graphically in Fig. 3. From Fig. 3, it is observed that the results obtained from the present analysis are very close to the results obtained by Kahya [15] because I have taken 15 elements for my present analysis. From the results, it also observed that only 15 elements (shown in Tables as P15) are sufficient for the desired accuracy of the obtained results compared to the other published results by Kahya [15] and Nguyan [13]. In Table 2, the fundamental natural frequencies are presented with available results of Simsek [4], Nguyen [13], and Kahya [15] \( \left( {{\text{for}}\;\delta = 0} \right) \) which gives very accurate results. And all the results with different tapered ratio except \( \delta = 0 \) are presented in Table 3 as new results and may be used for future reference for research work in this field. In Fig. 4, it has been observed that the fundamental natural frequencies of the beam increase with increasing the tapered ratio for different values of \( \left( {l/h_{0} } \right) \), keeping power law exponent \( \left( k \right) \) as constant. Again, it has been observed that keeping \( \left( {l/h_{0} } \right) \) and \( \delta \) constant, the normalized natural frequencies decrease when the power law exponent \( \left( k \right) \) increases as shown in Fig. 3. It may be further concluded that in all cases, the normalized natural frequencies are higher for C–C beams than those for C–F and H–H beams as shown in Fig. 5. It has been observed form Fig. 6 that the effect of the taper ratios on the first, third, and sixth normalized frequencies are not significant. But second, fourth, and fifth normalized frequencies are increasing with the increase in taper ratios.

Plot between normalized fundamental frequency v/s power law exponent for the present element with an earlier research paper for L/h = 5, δ = 0 and C–C boundary condition

Plot between normalized fundamental frequency v/s tapered ratio for k = 1, C–C boundary condition and different values of L/h

Plot between normalized fundamental frequency v/s tapered ratio for L/h = 5, K = 1 and different boundary conditions

Plot between normalized natural frequency v/s tapered ratio for L/h = 5, k = 0 and different mode shapes
Different boundary conditions are defined as follows:
For C–C: At \( x = 0 \), \( u = w = \phi = 0 \); \( {\text{At}} x = 2l, u = w = \phi = 0 \)
For H–H: At \( x = 0, w = 0; {\text{At }}\,x = 2l, w = 0 \) and
For C–F: At \( x = 0, u = w = \phi = 0 \).
4 Conclusion
In the present analysis, a five-node beam element with thirteen degrees of freedom is used to study the free vibration analysis of beam made of functionally graded material with linearly varying thickness under different boundary conditions for different values of power law exponent \( \left( k \right) \) and different length to thickness ratios. From the present analysis, it is observed that the performance of the present element is excellent and this element can be utilized for the analysis of critical buckling of FG beams as well as composite beams or functionally graded composite beams. It is also observed that maximum frequencies are obtained for C–C beams as expected than the others. It may also be seen that the power law exponent, length-to-thickness ratio, and the tapered ratio have a significant effect on fundamental frequencies.
References
Chakraborty A, Gopalakrishnan S, Reddy JN (2003) A new beam finite element for the analysis of functionally graded materials. Int J Mech Sci 45:17–22
Aydogdu M, Taskin V (2007) Free vibration analysis of functionally graded beams with simply supported edges. Mater Des 28(5):1651–1656
Sina SA, Navazi HM, Haddadpour H (2009) An analytical method for free vibration analysis of functionally graded beams. Mater Des 30(3):741–747
Şimşek M (2010) Fundamental frequency analysis of functionally graded beams by using different higher-order beam theories. Nucl Eng Des 240(4):697–705
Lee JW, Lee JY (2017) Free vibration analysis of functionally graded Bernoulli-Euler beams using an exact transfer matrix expression. Int J Mech Sci 122:1–17
Frostig Y, Baruch M, Vilnay O, Sheinman I (1992) High-order theory for sandwich-beam behaviour with transversely flexible core. J Eng Mech 118(5):1026–1043
Sankar BV (2001) An elasticity solution for functionally graded beam. Compos Sci Technol 61:689–696
Xiang HJ, Yang J (2008) Free and forced vibration of a laminated FGM Timoshenko beam of variable thickness under heat conduction. Compos B Eng 39:292–303
Şimşek M, Kocatürk T (2009) Free and forced vibration of a functionally graded beam subjected to a concentrated moving harmonic load. Compos Struct 90:465–473
Li XF, Wang BL, Han JC (2010) A higher-order theory for static and dynamic analyses of functionally graded beams. Arch Appl Mech 80:1197–1212
Alshorbagy AE, Eltaher MA, Mahmud FF (2011) Free vibration characteristics of a functionally graded beam by finite element method. Appl Math Model 35(1):412–425
Alshorbagy AE (2013) Temperature effects on the vibration characteristics of a functionally graded thick beam. Ain Shams Eng J 4:455–464
Nguyen T-K et al (2015) Vibration and buckling analysis of functionally graded sandwich beams by a new higher-order shear deformation theory. Compos B Eng 76:273–285
Kahya V (2012) Dynamic analysis of laminated composite beams under moving loads using finite element method. Nucl Eng Des 243:41–48
Kahya V, Turan M (2017) Finite element model for vibration and buckling of functionally graded beams based on the first-order shear deformation theory. Compos B Eng 109:108–115
Banerjee JR, Ananthapuvirajah A (2018) Free vibration of functionally graded beams and frameworks using the dynamic stiffness method. J Sound Vib 422:34–47
Karmanli A (2018) Free vibration analysis of two directional functionally graded beams using a third-order shear deformation theory. Compos Struct 189:127–136
Sinir S, Gultekin B (2018) Nonlinear free and forced vibration analyses of axially functionally graded Euler-Bernoulli beams with non-uniform cross-section. Compos B Eng 148:123–131
Chen M, Jin G, Zhang Y, Niu F, Liu Z (2019) Three-dimensional vibration analysis of beam with axial functionally graded materials and variable thickness. Compos Struct 207:304–322
Corr RB, Jennings A (1976) A simultaneous iteration algorithm for symmetric Eigen value problems. Int J Numer Meth Eng 10(3):647–663
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2021 Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Jain, R., Manna, M.C. (2021). Free Vibration Analysis of Functionally Graded Beam with Linearly Varying Thickness. In: Akinlabi, E., Ramkumar, P., Selvaraj, M. (eds) Trends in Mechanical and Biomedical Design. Lecture Notes in Mechanical Engineering. Springer, Singapore. https://doi.org/10.1007/978-981-15-4488-0_75
Download citation
DOI: https://doi.org/10.1007/978-981-15-4488-0_75
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-15-4487-3
Online ISBN: 978-981-15-4488-0
eBook Packages: EngineeringEngineering (R0)