
Abstract
Objectives of the paper are to (i) develop a new hyperchaotic system having hidden attractors and (ii) to show the applications using the new system in the form of secure communication. New system proposed in the paper has a stable equilibrium, hence considered under the class of the hidden attractors dynamical system. Dynamical characteristics of the novel system is confirmed using some numerical means like phase portrait, Poincaré map and Lyapunov spectrum plot. The applications of the new system are shown by encrypting and decrypting a sinusoidal signal and sound wave. Secure communication is achieved by designing a proportional integral (PI) based sliding mode control (SMC). MATLAB simulation results validate and ensure that the objectives are satisfied.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others
Keywords
1 Introduction
Available dynamical characteristic chaotic systems are classified into two clusters. The reported systems with (i) hidden attractors or (ii) self-excited attractors [1,2,3,4,5,6,7,8] are the two main cluster. Finding and advancement of the systems with hidden attractors is more challenging as compared to the other part. This is because in hidden attractors the knowledge of location of equilibrium point does not help in creation of the attractors [1,2,3,4,5,6,7,8]. Lorenz [9], Chen [10], Lu [11], chaotic system and systems in [12,13,14,15,16,17] are the types of self-excited attractors. Systems having stable equilibrium point [18, 19] or no equilibrium point [20, 21] are the main types of hidden attractors. Newly the chaotic/hyperchaotic systems with infinite equilibria also belong to the choice of the hidden attractors [22,23,24,25,26,27]. The study of the chaotic/hyperchaotic systems having such nature is significant. This is so because in such system unexpected and undesired behaviours can be observed [6, 28, 29].
Hidden attractors are seen in various types of chaotic/hyperchaotic system as discussed in the literature [30, 31]. Dynamical systems with stable equilibrium point hidden attractors are comparatively less available in the literature as compared with no equilibrium point system of hidden attractors. We know that the hyperchaotic systems are more complex as compared with the chaotic systems [24, 32]. Thus, development of hyperchaotic system is more important. The available dynamical system (chaotic/hyperchaotic) systems having stable nature of equilibria are given in the Table 1. Table 1 reflects that hyperchaotic systems having stable nature of the equilibrium points are very few in the literature. It is noted from the available literature and the Table 1 that there is still some scope for developing the system with stable equilibria. Considering the above discussion, this paper needs to report a new hyperchaotic system. The important feature in the new system is that it has a stable equilibrium point.
The remaining paper goes like this. Section 2 presents the dynamics of the proposed new system having hyperchaotic behaviour and stable equilibria. Numerical analysis of the reported system is discussed in Sect. 3. Application of the new system is discussed in the Sect. 4 of the paper. Results and discussion of the application is presented in Sect. 5 of the paper. And in the last the paper is concluded in the Sect. 6 of the paper.
2 A New Dynamical Hyperchaotic System Having Stable Nature of Equilibrium Point
In the present section, the dynamics of a new system is presented which is considered in the work. The new proposed system is developed from the Lorenz-stenflo system [19] by using state feedback control. The dynamics of the reporting system is presented in (1).
In system (1), \( a, b, c, d, e \) are the parameters and \( x_{1} , x_{2} , x_{3} , x_{4} \) are considered as the state. The system in (1) is obtained from the Lorenz-stenflo system using state feedback control and perturbing one term.
The system in (1) is invariant when \( \left( {x_{1} , x_{2} , x_{3} , x_{4} } \right) \to \left( { - x_{1} , - x_{2} , x_{3} , - x_{4} } \right) \). Therefore, the proposed system dynamics has regularity around the \( x_{3} \) axis.
The new hyperchaotic system proposed in the paper is a dissipative dynamical system. This is proved by finding the divergence of the new system and is given in (2).
It is seen from (2) that the divergence is negative because \( a, c, d \) are the positive constants. Thus the volume in the phase space of the new system decays exponentially with the rate \( \left( {a + c + d} \right) \). Therefore it may be said that there can be attractors in system (1).
Equilibrium point of the new considered system is found out by putting the derivate of each state variable to zero. The system in (1) has only equilibrium point at \( E = \left( {0,\, 0, \, - \frac{d}{4},\,0} \right). \) Eigenvalues of the new system is found out using the Jacobian matrix given in (3).
Table 2 presents the eigenvalues of the system given in (1). It is specious from Table 2 that the new system has all the eigenvalues with stable nature. Thus, the new system may have hidden attractors.
3 Dynamical Analysis of System (1)
Dynamical behaviour of the considered new proposed system is shown in the present section using some of the numerical method.
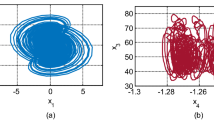
The new system has hyperchaotic behaviour with \( a = 35,\, b = 30, \,c = 17, \,d = 0.78,\, e = 14 \). Finite-time LEs for these sets of parameters are \( L_{i} = \left( {1.014,\, 0.218, \,0,\, - 19.686 } \right). \) Hyperchaotic attractors of the new system with \( a = 35,\, b = 30, \,c = 17, \,d = 0.78, \,e = 14 \) are revealed in Fig. 1. Poincaré map across \( x_{1} = 0 \) plane of the new system is presented in Fig. 2. The dynamical behaviour/characteristics of the new system is investigated by plotting the finite-time Lyapunov spectrum (LS). The finite-time LS is plotted by finding the Lyapunov exponents with the fixed initial conditions \( x\left( 0 \right) = \left( {0.2,\, 0.1, \,5, \,0.1} \right)^{T} \) and observation time T = 20,000 time unit. The LEs are calculated by the method of Wolf et al. algorithm [51] in MATLAB simulation environment. The finite-time Lyapunov spectrum with varying e keeping other parameter fixed in Fig. 3. Presence of the two positive natures of the Lyapunov exponents in Fig. 3 indicates the existence of hyperchaotic behaviour in the new system.

Hyperchaotic attractors with \( a = 35,\, b = 30,\, c = 17,\, d = 0.78, \,e = 14 \) for system (1)

Poincaré map across \( x_{1} = 0 \) in: a \( x_{2} - x_{3} \) plane and b \( x_{3} - x_{4} \) plane of the new system

Finite time LS with \( a = 35, \,b = 30, \,c = 17,\, d = 0.78 \) and \( x\left( 0 \right) = \left( {0.2, 0.1, 5, 0.1} \right)^{T} \) for the new system
4 Secure Communication Using the System in (1)
Here, an application using the new proposed system is illustrated. The application is shown in the field of secure communication by masking and retrieving of information signals.
In last decade chaotic/hyperchaotic systems are commonly being applied for secure communication [52,53,54]. The chaotic signals are being used in various ways in the secure communication. One common way is for encryption and decryption of a message signal. The main reason for this is that chaotic signals have apparently noise like nature and unpredictable behaviour [52,53,54,55].
In the paper the secure communication using the new system in (1) is presented by considering as like the system acting as a master and system acting like as a slave system. Suppose the system acting like as a master and the system acting like as a slave system are given in (4) and (5), respectively
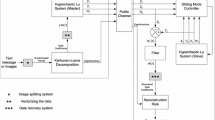
where \( m = x_{1} + s \) and s is the message signal and \( u_{1} ,\, u_{2} ,\,u_{3} \) control inputs which are needed to be designed. Here, the message (m) is added with state \( x_{1} \). When the system acting like a master (4) has states synchronised with the system acting like the system as a slave (5) systems i.e., \( y_{i} = x_{i} \), then at the receiver end the message signal \( \tilde{s} \) is retrieved as \( \tilde{s} = m - y \approx s \). Here it is considered that the SNR of the message signal \( (m) \) is less than the masking signal \( x_{1} \). The application is completely illustrated and sketched in Fig. 4.

Complete communication scheme [52]
The synchronisation errors among the system acting like as a master (4) and the system acting like as a slave system (5) are given in (6).
Next question is to narrate the stabilisation of the error dynamics given in (6). It is required to bring the error dynamics to zero. The answer for the question and the required task is performed by designing a suitable SMC. Here proportional integral SMC is designed for this purpose.
The mathematical structure of the PI sliding surface is presented in (7).
where \( k_{1} \) and \( k_{2} \) are the user defined positive parameters. It is needed that when dynamics goes through the sliding variable, it requires to satisfies \( \dot{s}_{i} = 0. \) Now the equivalent mode dynamics [56] is be written as (8).
The stabilisation of the error dynamics defined in (8) is shown by choosing a Lyapunov function candidate as \( V_{1} \left( e \right) = \frac{1}{2}\left( {e_{1}^{2} + e_{2}^{2} + e_{3}^{2} + e_{4}^{2} } \right) \). The \( \dot{V}_{1} \left( e \right) \) along with (8) is written in (9).
After arranging some terms, we get
where \( k_{1} , k_{2} , k_{3} , k_{4} \) are the positive constant. It is apparent from (9) that it is negative definite. Therefore, the sliding motion is asymptotically stable.
SMC controllers proposed are designed in (10).
Theorem 1
The error in (6) converges to \( \sigma_{i} = 0 \) if it is controlled by (10) and also ensure synchronisation between the system as the master (4) and the system as the slave (5) system.
Proof
Suppose Lyapunov candidate function as \( V_{2} \left( s \right) = \frac{1}{2}\left( {s_{1}^{2} + s_{2}^{2} + s_{3}^{2} } \right) \). The time derivative of \( V_{2} \left( s \right) \) along with (7) can be written as
Now inserting the control laws (10) in (11) we get,
where \( \rho_{1} , \rho_{2} , \rho_{3} \) are the positive constants. Thus, we can say that \( \dot{V}_{2} \left( s \right) < 0 \) for \( s \ne 0 \). Therefore sliding surfaces \( s_{1} ,s_{2} \) and \( s_{3} \) converge to \( s_{1} = 0 \), \( s_{2} = 0 \) and \( s_{3} = 0 \), [56] respectively. Hence, error dynamics given in (7) stabilises at origin. Therefore, the master (4) and the slave (5) systems states are synchronised. Therefore the message signal is encrypted and decrypted successfully using the proposed approach.
5 Results and Discussion for Secure Communication Using the New Hyperchaotic System
This section discussed the secure communication using the new hyperchaotic system. The application is shown by encryption and decryption of a sinusoidal signal and sound like signal. Simulation of the master and slave hyperchaotic systems is done with the initial conditions \( x\left( 0 \right) = \left( {0.2, \,0.1, \,5,\, 0.1} \right)^{T} \), \( x\left( 0 \right) = \left( {0.5,\, 0.5, \,2, \,0.5} \right)^{T} \), respectively. The values of the constants used for the SMC are \( k_{1} = k_{2} = k_{3} = 2,\, \rho_{1} = 5, \,\rho_{2} = 2, \,\rho_{3} = 2. \)
For masking, a sinusoidal signal in the form \( s = \sin \left( {2\pi 10t} \right) \) and a speech signal available in MATLAB named with “handle.mat” are used.
Results of the secure communication with the sinusoidal signal are shown from Figs. 5, 6, 7 and 8. Synchronisations of the system considered as the master system and system considered as the slave systems having synchronised states are shown in Fig. 5. It is apparent from Fig. 5 that the states of the master and slave systems are synchronised properly. The time behaviours of the designed sliding surfaces and the designed control inputs are shown in the Figs. 6 and 7 respectively. The nature of the carrier, masked and the transmitted signals along with recovered signal are presented in Fig. 8. Figure 8 discussed that the transmitted message signal is recovered properly.


Behaviour of the sliding surface designed for the synchronisation with sinusoidal signal


Responses of the carrier, masked and the transmitted sinusoidal message signal along with recovered sinusoidal message signal
Now a sound signal is used for the secure communication. The synchronisation errors between the master and slave systems having synchronised states are shown in Fig. 9. It is apparent from Fig. 9 that master and slave systems are synchronised properly in smaller synchronising time. Behaviour of the transmitted message signal, masked signal and recovered message signal in case sound wave is shown in Fig. 10. It is seen from Fig. 10 that the transmitted message signal is recovered properly. Thus, the concept of application in secure communication using the proposed system is validated.


Responses of the transmitted sound wave message signal, masked signal and recovered message signal
6 Conclusions
In the present work, a new hyperchaotic system is reported. Presence of an equilibrium point having stable nature in the new system makes it to be considered under hidden attractors dynamical system. Dynamical properties in the new system is shown using some numerical methods like phase portrait, Poncaré map and Lyapunov spectrum. The applications of the new system are shown in secure communication by masking of a sinusoidal signal and a sound wave. A PI-SMC is designed for the application. Results using the MATLAB simulation validate the numerous dynamical characteristics and application of the new system.
References
Leonov GA, Kuznetsov NV, Kuznestova OA, Seledzhi SM, Vagaitsev VI (2011) Trans Syst. Control 6(2):1–14
Klokov A, Zakrzhevsky MV (2011) Int J Bifurc Chaos 21:2825–2535
Leonov GA, Kuznetsov NV, Vagaitsev VI (2011) Phys Lett A 375(23):2230–2233
Leonov GA, Kuznetsov NV (2013) Int J Bifurc Chaos 23(1):1330002–130071
Leonov GA, Kuznetsov NV, Vagaitsev VI (2012) Phys D 241(18):1482–1486
Leonov GA, Kuznetsov NV, Kiseleva MA, Solovyeva EP, Zaretskiy AM (2014) Nonlinear Dyn 77(1–2):277–288
Leonov GA, Kuznetsov NV, Mokaev TN (2015) Commun Nonlinear Sci Numer Simul 28(1–3):166–174
Leonov GA, Kuznetsov NV, Mokaev TN (2015) Eur Phys J Spec Top 224(8):1421–1458
Lorenz EN (1963) J Atmos Sci 20(2):130–141
Chen G, Ueta T (1999) Int J Bifurc Chaos 9:14651999
Lü J, Chen G, Cheng D, Celikovsky S (2002) Int J Bifurc Chaos 12(12):2917–2926
Singh JP, Roy BK (2015) Int J Control Theory Appl 8(3):1005–1013
Singh PP, Singh JP, Roy BK (2014) Chaos Solitons Fractals 69:31–39
Singh JP, Roy BK (2015) Int J Control Theory Appl 8(3):1015–1023
Singh JP, Roy BK (2016) Chaos Solitons Fractals 92:73–85
Singh JP, Roy BK (2016) Optik 127(24):11982–12002
Singh JP, Lochan K, Kuznetsov NV, Roy BK (2017) Nonlinear Dyn 90(2):1277–1299
Wei Z, Zhang W, Wang Z, Yao M (2015) Int J Bifurc Chaos 25(2):1550028
Wei Z, Zhang W (2014) Int J Bifurc Chaos 24(10):1450127
Akgul A, Calgan H, Koyuncu I, Pehlivan I, Istanbullu A (2016) Nonlinear Dyn 84(2):481–495
Singh JP, Roy BK (2017) Int J Dyn Control 6:529–538
Jafari S, Sprott JC (2013) Chaos Solitons Fractals 57:79–84
Li Q, Zeng H, Li J (2015) Nonlinear Dyn 79(4):2295–2308
Pham V-T, Jafari S, Volos C, Giakoumis A, Vaidyanathan S, Kapitaniak T, Trans IEEE (2016) Circuits Syst II Express. Briefs 63(9):878–882
Singh JP, Roy BK (2017) Optik 145:209–217
Singh JP, Roy BK (2017) Nonlinear Dyn 89(3):1845–1862
Singh JP, Roy BK, Jafari S (2017) Chaos Solitons Fractals 106:243–257
Dudkowski D, Jafari S, Kapitaniak T, Kuznetsov NV, Leonov GA, Prasad A (2016) Phys Rep 637:1–50
Kingni ST, Pham V-T, Jafari S, Kol GR, Woafo P (2016) Circ Syst Signal Process 35(6):1807–1813
Kingni ST, Jafari S, Pham V-T, Woafo P (2017) Math Comput Simul 132:172–182
Wei Z, Moroz I, Wang Z, Sprott JC, Kapitaniak T (2016) Int J Bifurc Chaos 26(7):1650125
Li C, Sprott JC, Thio W, Zhu H (2014) Trans IEEE Circ Syst II Express Briefs 61(12):977–981
Zhusubaliyev ZT, Mosekilde E, Churilov AN, Medvedev A (2015) Eur Phys J Spec Top 306:6–15
Wang L, Yang XS (2015) IFAC-PapersOnLine 48(18):205–210
Pham V-T, Volos C, Kapitaniak T (2017) In: Systems with hidden attractors, pp 21–35
Wang X, Pham V, Jafari S, Volos C, Munoz-pacheco JM, Tlelo-cuautle E (2017) IEEE Access 5:8851–8858
Wang X, Chen G (2011) In: Proceedings—4th international workshop on chaos-fractals theories and applications, IWCFTA 2011, pp 82–85
Pham V, Jafari S, Kapitaniak T, Volos C, Kingni ST (2017) Int J Bifurc Chaos 27(4):1750053–1750061
Jafari MA, Mliki E, Akgul A, Pham V-T, Kingni ST, Wang X, Jafari S (2017) Nonlinear Dyn 88(3):2303–2317
Kingni ST, Jafari S, Simo H, Woafo P (2014) Eur Phys J Plus 129(76):1–16
Wei Z, Wang Z (2013) Kybernetika 49(2):359–374
Molaie M, Jafari S, Sprott JC, Golpayegani SMRH (2013) Int J Bifurc Chaos 23(11):1350188
Wang X, Chen G (2012) Commun Nonlinear Sci Numer Simul 17(3):1264–1272
Wei Z, Yang Q (2011) Nonlinear Anal Real World Appl 12(1):106–118
Wei Z, Pehlivan I (2012) Optoelectron Adv Mater Rapid Commun 6(7–8):742–745
Wei Z (2012) Comput Math Appl 63(3):728–738
Wei Z, Yang Q (2011) Nonlinear Dyn 68(4):543–554
Huan S, Li Q, Yang X-S (2013) Int J Bifurc Chaos 23(1):1350002–1350006
Wei Z, Yu P, Zhang W, Yao M (2015) Nonlinear Dyn 82(1–2):131–141
Wei Z, Moroz I, Sprott JC, Akgul A, Zhang W (2017) Chaos 27(3)
Wolf A, Swift JB, Swinney HL, Vastano JA (1985) Physics D 16(3):285–317
Wu X, Wang K, Wang X, Kan H (2017) Nonlinear Dyn 90(2):855–875
Ge X, Lu B, Liu F, Luo X (2017) Nonlinear Dyn 90(2):1141–1150
Abd MH, Tahir FR, Al-Suhail GA, Pham V-T (2017) Nonlinear Dyn 90(4):2583–2598
Andrievskii BR, Fradkov AL (2004) Autom Remote Control 65(4):505–533
Bartolini G, Fridman L, Pisano A, Usai E (2008) Modern sliding mode control theory. Springer, Berlin, Heidelberg
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2020 Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Singh, J.P., Lochan, K., Roy, B.K. (2020). Secure Communication Using a New Hyperchaotic System with Hidden Attractors. In: Shreesha, C., Gudi, R. (eds) Control Instrumentation Systems. Lecture Notes in Electrical Engineering, vol 581. Springer, Singapore. https://doi.org/10.1007/978-981-13-9419-5_6
Download citation
DOI: https://doi.org/10.1007/978-981-13-9419-5_6
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-13-9418-8
Online ISBN: 978-981-13-9419-5
eBook Packages: EngineeringEngineering (R0)