
Abstract
Time to first fix of ambiguity is always finished by using multiple sequential epochs in real-time kinematic (RTK). Among different epochs, the residual observation errors exist the time correlation each other, which increases with the increase of distance of baseline. However, the characteristics of time correlation is always neglected by traditional RTK stochastic model to limit the performance of ambiguity resolution. In this paper, the characteristics of time correction among different epochs with BeiDou observations are analyzed. The magnitudes of the time correction from GEO satellites of BeiDou show larger than the MEO and IGSO satellites of BeiDou and all MEO satellites of GPS. Therefore, in this paper, the characteristics of time correction are modeled by using first-order Gaussian Markov processing to further adjust the RTK stochastic model. The proposed method is tested by a Monte-Carlo simulation and actual BeiDou observations. The simulated test shows that the proposed method can get more real probability of correct fix, compared with the model neglecting the characteristics of time correction. The actual test show that the proposed method deceases the probability of false alarm and missed detection by 50 and 15%, respectively, compared with the model neglecting the characteristics of time correction. As a result, the proposed method achieves the optimal ambiguity resolution performance taking the probability of success, false alarm and missed detection into account, simultaneously.
Access provided by CONRICYT-eBooks. Download conference paper PDF
Similar content being viewed by others

Keywords
1 Introduction
Integrity ambiguity resolution is one of significantly point of carrier phase based difference technique for achieving centimeter level positioning. The stochastic model of BeiDou satellite navigation system is one of the main factor that restricts the ambiguity resolution efficiency. By accurately describing the stochastic model, the ambiguity can be calculated more correctly to achieve high-precision positioning results [1]. The observational error of BeiDou can be roughly divided into two variables, slow variables including atmospheric delay and multipath effects [2]. Normally, slow variables cause a strong charismatics of temporal correlation. Under the condition of long baseline, slow variables cannot be eliminated by double difference. As a result, there will be a temporal-related characteristic of double-difference observations among epochs, which will cause adverse effects [1, 3]. In order to describe precisely stochastic model, not only the stochastic characteristics of various types of errors need to be described accurately, but also the impact of various types of error-time related characteristics of the system should be considered.
Precisely stochastic model is the precondition for realizing the high precision positioning. In recent studies, Euler and Goad proposes weighted model based on satellite elevation angles and obtains significant effects in practical applications. However, they don’t consider the correlation of among satellite observations. Anangaza [4] applies variance component estimation to Global Positioning System(GPS) network data processing to get a stable adjustment results. Howind [5] and EI-Rabbany [6] consider the influence of time correlation on the baseline accuracy and prove that the time correlation has less effect on the coordinate results.
In the process of applying dynamic Kalman filtering of GPS, Yang Yuanxi [7] estimates variance and covariance matrix based on historical information and new information on real-time, which makes the filtering not only make full use of the historical information but also express the current information as much as possible. Li Bofeng [8], under the condition of short baselines, analyzes the Beidou and GPS stochastic characteristics and concludes that there are varying degrees of correlation between accuracy and elevation angle on Beidou and GPS. Through the above analysis, the time correlation will affect the accuracy of the ambiguity assessment, then affecting the validation of the ambiguity resolution. Therefore, the time-dependent stochastic model is important for improving reliability of ambiguity resolution.
In this paper, we use Beidou data of short-baseline to analyze time correlation. on this basis, simulation and time-related stochastic model is studied and discussed.
2 Zero Baseline Single Difference Observation Model
The test uses zero baseline single-difference observations, ignoring the effects of atmospheric delays and multipath errors. The single-difference observation equation is:
where \( \nabla \) is a single difference operator, and \( \nabla P_{L}^{s} \) and \( \nabla P_{P}^{s} \) are single-difference carrier observations and single-difference pseudo range observations, and \( \nabla \rho^{s} \) is the single difference guard distance. \( \nabla \delta t_{L} ,\nabla \delta t_{P} ,\nabla \delta t_{0,L} ,\nabla \delta t_{0,P} ,\nabla \varepsilon_{L}^{s} ,\nabla \varepsilon_{P}^{s} \) respectively are single-difference carrier receiver clock error, single-difference pseudo range receiver clock error, the receiver hardware delay and observation noise. \( \nabla N_{L}^{s} \) are single-difference integer ambiguities, λ is the carrier phase wavelength, and s is the satellite number.
In order to introduce the whole-week characteristic of double-difference ambiguity, the reference satellite number is set as r, and the above equation can be written as:
In Eq. (3), the constant items are combined into one item that is the phase equivalent clock error \( \nabla \delta_{L} = \nabla \delta t_{L} + \nabla \delta t_{0,L} - \lambda \nabla N_{L}^{r} .\lambda \Delta N_{L}^{sr} \) is double-difference integer ambiguity. Receiver clock error and the receiver hardware delay in the single difference pseudorange observation equation are combined into:
With the known observations, baseline and double-difference ambiguity plugged into (1, 2), the single difference observation equation is:
Assuming that the number of public satellites in the base station mobile station is m at this moment, the single-epoch pseudo range observation equation can be written as:
In the formula, observation vector \( \nabla \tilde{\varvec{P}}_{P} = \left( {\nabla \tilde{P}_{P}^{s1} \nabla \tilde{P}_{P}^{s2} \ldots \nabla \tilde{P}_{P}^{sm} } \right)^{T} ,m \times 1 \) dimension matrix \( \varvec{e}_{m} = \left( {\begin{array}{*{20}c} 1 & \cdots & 1 \\ \end{array} } \right)^{T} \), noise vector \( \nabla\varvec{\varepsilon}_{P} = \left( {\nabla \varepsilon_{P}^{s1} \nabla \varepsilon_{P}^{s2} \ldots \nabla \varepsilon_{P}^{sm} } \right)^{T} \), superscript s corresponds to satellite number. The carrier phase observation equation can be similarly introduced.
Assuming that the observations of m satellites completely satisfy the stochastic distribution at this moment, the common constant term \( \nabla \delta_{P} = \varvec{e}_{m} \varvec{e}_{m}^{T} \nabla \tilde{\varvec{P}}_{P} /m \) can be calculated by solving the expectation, so that the residual vector v of single-epoch single-difference pseudo-range observations can be calculated as follows:
Due to the fixed ambiguity parameter, the carrier phase observation equation is similar to the pseudo range observation equation, so the residual vector of single difference carrier phase can be calculated.
3 Time Correlation
3.1 Time Correlation Estimation
The time correlation coefficient \( \rho \) is defined as:
where i, j are the number of epoch, and \( \tau \) is the epoch interval.
The formula for deriving the correlation coefficient of available time is:
where \( {\varvec{\upnu}} = \nabla \tilde{\varvec{P}}_{P,i} - \varvec{e}_{m} \varvec{e}_{m}^{T} \nabla \tilde{\varvec{P}}_{P,i} /m \) is the residual of the ith epoch single-difference pseudo range observation; \( \sigma_{P,i} \) and \( \sigma_{P,i + \tau } \) are respectively the mean-squared error of the pseudorange observations for the epoch i and \( i + \tau \) ephemeris; the corresponding pseudorange observations of the epoch i and \( i + \tau \) are \( r_{i} \) and \( r_{i + \tau } ,r_{i} { = }r_{i + \tau } = m - 1 \). Similarly, the carrier phase time correlation coefficient can be obtained.
3.2 Multiple Epoch-Time Related Stochastic Models
According to the known time-dependent characteristics, the multi-epoch, single-difference time-related covariance matrix is constructed as follows:
The time correlation coefficient is defined as:
4 Experimental Results and Analysis
4.1 Time Correlation
In this paper, the data measured by the Observatory of Curtin University in Australia on January 28th, 2016 is used. The sampling rate is 30 s, and the cut-off height angle is \( 10^{\circ } \). The time correlations for the baseline of zero, baseline of 4.27 m and baseline of 8.42 m, are extracted respectively, and calculate the autocorrelation coefficient based on the time-related consideration method mentioned above.
Figure 1 shows that the time correlation of zero baseline is very weak. The reason is that the inter station error is strongly correlated. The observed noise after single difference is a white noise without time correlation.

Zero baseline time correlation coefficient
As the baseline increases, the residual error of the observed noise increases, and the observed noise contains colored noise terms [9, 10], making it time-related. Figure 2 shows the time correlation coefficient of 4.27 m baseline extraction. It can be clearly seen that the autocorrelation coefficient decays gradually until zero as the time interval increases. It is verified that there is a temporal correlation in the observed data. The autocorrelation coefficient of the 8.42 m baseline in Fig. 3 also confirms the existence of time correlation.

4.27 m baseline time correlation coefficient

8.42 m baseline time correlation coefficient
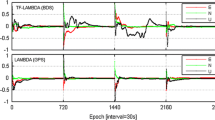
In addition, data of 7.98 m baseline is used to analyze the time correlation of GPS and BDS. It can be seen from the comparison of Figs. 4 and 5 that the time correlation of BDS is stronger than that of GPS system. The specific reason can be analyzed from Figs. 6 and 7. From Fig. 7, it can be seen that the correlation between the time correlation of IGSO and MEO satellites in BDS is approximate to the GPS time. From Fig. 6, it can be concluded that the GEO satellites in BDS is the reason why the time correlation of BDS is stronger than that of GPS. For GEO is a geostationary satellite, the change in relative ground position is smaller, so the time correlation of GEO is stronger than that of MEO and that of IGSO.

GPS 7.98 m baseline time correlation coefficient

BDS 7.98 m baseline time correlation coefficient

BDS GEO time correlation coefficient

BDS no-GEO time correlation coefficient
4.2 Simulation
4.2.1 Time-Related Simulation
A total of 7 different scenarios are evaluated. The scheme ignores the effects of the atmosphere and these scenarios may be useless for all base stations except for very short baselines, but they are able to independently research on multi-path standard deviation and time-dependent effects. Scenario A is the basic case and Scenarios B to E independently consider the changes of each of the four multipath parameters.
According to Kyle [11], we consider the time-dependent error as a first-order Gaussian Markov model [1, 12]:
where the interval \( \nabla t \) between the epochs in the data is known, and in the covariance matrix only T and \( \sigma \) are unknown. At this moment, the time-related covariance matrix can be written as:
On the basis of the zero-time data with very weak time correlation, the time-related simulation is performed on the stochastic model. Also, the single-difference measurement noise term is suppose to be 0.3 m for pseudo ranges and 1 mm for phases. In each case, the state covariance matrix for each epoch is calculated using the previously mentioned multi-epoch accumulations. This is achieved by applying the LAMBDA algorithm to decorrelate the ambiguity state [13]. During the process, submatrices corresponding to the state of the ambiguity are extracted from the global state covariance matrix to determine the PCF for each epoch (Table 1).
Basic scenario: scenario A
The results from this scene will be used to compare with all other scenes to determine the effect of changing each different simulation parameter.
Deviations: Cases B and C
Schemes B deals with the effects of tripling the pseudo range and schemes C tripling the carrier phase multipath standard deviation. It can be seen from Fig. 8 that increasing the pseudo range multipath standard deviation has a smaller effect on the correct correction probability, whereas multiplying the carrier phase multipath by a factor of three greatly affects the PIF. The reason is that the estimated variance of the ambiguity state mainly depends on the phase observations, and code multipath only affects the position solution and is mostly average over time.

Scenarios A, B, C, G PIF
Programs D and E.
The scheme D and E increase the correlation time of the pseudo range or carrier phase by three times respectively. As can be obtained from Fig. 9, the increase of pseudo range multipath correlation time has little effect on PIF. However, the effect is seen with an increase in relative phase multipath. Again, the dependence on phase multipath can be explained by the fact that phase observations more directly affect the ambiguity state than code observations. However, it can be seen in the case of increasing carrier phase multipath correlation time. That the carrier phase has more direct influence on the fuzzy state than the pseudo range.

Scenarios A, D, E, F PIF
Increase the relevant time: Scene F
As shown in Fig. 9, increasing both the pseudo range and carrier phase correlation time results in a result similar to that obtained by adding only the phase-dependent time in scheme E.
Increase multipath standard deviation: Case G
Much of the results obtained by increasing the standard deviation of pseudo range and carrier phase multipath follow the results obtained when the standard deviation of multipaths for carrier phase increases, and the small part is affected by the standard deviation of pseudo range multipath. The reason is simple, and the probability of correction depends on the variance of the estimated ambiguity, which in turn depends mainly on the quality of the phase observations.
4.2.2 Monte Carlo Simulation
In order to verify the effect of the time-related stochastic model, the following simulation will be used to compare and analyze. Firstly, with the Monte Carlo algorithm, the ambiguity of single epoch is fixed for 100 thousand times to determine the success real value of the ambiguity, then the ambiguities of the traditional stochastic model and time-related stochastic model are fixed. Finally, the results of ambiguity resolution of the above three ways are comparatively analyzed.
As can be seen from Fig. 10, with the existence of time correlation, if the stochastic model does not consider the time-related part of the data, the lower limit of the success rate of ambiguity resolution will be overly optimistic.

Scenarios A PCF
However, if the stochastic model takes the time correlation into consideration, the lower limit of the success rate of ambiguity resolution obtained by the LAMBDA algorithm will match the success rate of ambiguity resolution produced by the Monte Carlo method. From Figs. 11 and 12, we can see that the phenomenon above will become more and more obvious with the increase of the time-related parameters [11].

Scenarios B PCF

Scenarios C PCF
4.3 The Actual Data Validation
According to the time-related characteristics mentioned before, the corresponding parameters are substituted into the model to obtain the location results of the traditional stochastic model and the time-related stochastic model.
The following indicators are introduced to analyze the effect of ambiguity resolution.
Ambiguity correct number of epochs divided the number of all epochs is the success rate of ambiguity resolution:
The success rate of ambiguity resolution which passes Ratio test:
The miss rate, the rate of fixing ambiguity unsuccessfully and passing Ratio test:
The false alarm rate, the rate of fixing ambiguity successfully and failing Ratio test:
where, \( n_{pass} ,n_{corr} ,n_{pass}^{\rm I} ,n_{pass}^{\Pi } ,n_{total} \) respectively, are the number of epochs when the ambiguity passes the test, the number of epochs when the ambiguity is fixed successfully, the number of epochs when the ambiguity passes the test and is fixed unsuccessfully, the number of epochs when the ambiguity fails the test and is fixed successfully and the number of all epochs.
Table 2 shows the comparison between the traditional stochastic model and the time-related stochastic model for solving the ambiguity effect. The second column of the table shows the success rate of the correct ambiguity resolution from which it can be seen that the time-related stochastic model can improve the success rate of ambiguity solution. With the Ratio test and different thresholds of the test, the success rate of the ambiguity resolution of the time-related stochastic model is higher than that of the traditional model, which indicates that the using of the time-related stochastic model increases the success rate of ambiguity resolution and system continuity. In addition, the false alarm rate and miss detection rate of the time-related stochastic model are both less than those of the traditional model, which shows that the time-related stochastic model can reduce the miss detection and the false alarm and ensure the reliability of the system results. From the 8.42 m baseline data, it is showed that the miss detection rate is always lower than 50% of the traditional stochastic model, which is important in the ambiguity resolution. The increase of the miss detection rate will make the wrong ambiguity pass the Ratio indicator test. Using the wrong ambiguity will result in incorrect positioning results, and this is supposed to be avoided.
The table shows that with the Ratio test threshold loosening, the success rate of ambiguity resolution increases, but the miss detection rate also increases. However, the missed detection rate of the traditional stochastic model is so large that the fuzzy success rate of the stochastic model is higher than the true value, which verifies the result of the simulation. As to the time-related stochastic model, its success rate of ambiguity resolution is higher, and its false alarm rate and missed detection rate are lower. Compared to the traditional model, the time-related stochastic model reaches a better balance between the missed detection rate and the false alarm rate.
We usually use three Ratio test thresholds, and they are 1, 1/2, 1/3. When the threshold value is 1, all the ambiguity resolution can pass the test, and then if this error is smaller than 0.1 m, the ambiguity will be fixed successfully. Then, the success rate of true ambiguity resolution can be calculated. The table shows that the time-correlated random model can improve the success rate of ambiguity resolution, caused by the more exact description of the error. When the threshold is 1/2, the traditional stochastic model begins to miss detection, while the time-related stochastic model can still keep the undetected rate being 0. Besides, the success rate of ambiguity resolution and the false alarm rate are better than the traditional model. When the threshold is 1/3, the strict threshold test makes the missing detection rate of both models become zero, but with the time-related stochastic model, the success rate of ambiguity resolution is higher and the false alarm rate is lower.
5 Conclusion
In this paper, we mainly study the influence of time correlation on ambiguity resolution and construct a time-related stochastic model by analyzing the time-related characteristics of observations. We compare the effect traditional stochastic model and time-related stochastic model on ambiguity resolution by simulation. Finally, the following conclusions are obtained from several experiments:
-
(1)
The time correlation among epochs using Beidou observations is more obvious than that of GPS, especially the geostationary characteristics of GEO satellites.
-
(2)
The time-related enhancement will reduce the success rate of ambiguity resolution, and the success rate of ambiguity resolution without considering the temporal correlation will excess optimistic which causes missing detection of ambiguity resolution.
-
(3)
The time-related stochastic model can improve the success rate of ambiguity resolution, while the miss detection rate and the false alarm rate are reduced by 50% and 15% respectively compared with the traditional model, and can achieve a better performance in terms of the ambiguity resolution success rate, miss detection rate and error rate.
References
Yi-He L, Yun-Zhong S (2011) Effect of time correlation of gps observations on baseline solution. J Wuhan Uni (Info Sci Edn) 04:427–430
Wang Q (2007) Preliminary study on GPS time correlation. Modern Commerce and Industry, 024
Sheng Z, Liang W, Zhao-liang D (2010) Research on pseudorange smoothing technology of GNSS receiver. J Radio Eng 04:32–34
Ananga N, Coleman R, Rizos C (1994) Variance-covariance estimation of GPS networks. J Geodesy 68(2):77–87
Howind J, Kutterer H, Heck B (1999) Impact of temporal correlations on GPS-derived relative point positions. J Geodesy 73:246–258
El-Rabbany AE (1994) The effect of physical correlation on the ambiguity resolution and accuracy estimation in GPS differential positioning. Ph.D. thesis, Department of Geodesy and Geomatics Engineering, University of New Brunswick, Fredericton
Yuan-Xi Y, Tian-he X (2003) Adaptive filtering based on covariance and variance components estimation of mobile windowing. J Wuhan Uni Sci Edn 28(6):714–718
Bo-feng L, Yun-zhong S, Pei-liang X (2008) Stochastic model evaluation of different GPS receivers. Chin Sci Bull 53(16):1967–1972
Changsheng Z (2013) Kalman filtering under noise-related conditions. Proc Bull 1:14–15
Mei S, Yun Z (2003) Kalman filtering of correlated noise systems. Aerosp Meas Technol 23(4):38–42
O’Keefe K, Petovello M, Lachapelle G et al (2006) Assessing probability of correct ambiguity resolution in the presence of time-correlated errors. Navigation 53(4):269–282
Haonan Z, Cuilin K, Wujiao D (2013) Application of Kalman filter considering colored noise in GPS high-frequency dynamic deformation monitoring. J Eng Investigation 04:50–54
Li L, Jia C, Zhao L et al (2016) Integrity monitoring-based ambiguity validation for triple-carrier ambiguity resolution. Gps Solutions 1–14
Acknowledgements
This research was jointly funded by National Natural Science Foundation of China (Nos. 61773132, 61633008, 61374007, 61304235), the Fundamental Research Funds for Central Universities (No. HEUCFP201768), and the Post-Doctoral Scientific Research Foundation, Heilongjiang Province (No. LBH-Q15033).
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2018 Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Xin, Z., Li, L., Jia, C., Li, H., Zhao, L. (2018). BeiDou Reliable Integer Ambiguity Resolution in the Presence of Time-Correlated Obversion Errors. In: Sun, J., Yang, C., Guo, S. (eds) China Satellite Navigation Conference (CSNC) 2018 Proceedings. CSNC 2018. Lecture Notes in Electrical Engineering, vol 498. Springer, Singapore. https://doi.org/10.1007/978-981-13-0014-1_47
Download citation
DOI: https://doi.org/10.1007/978-981-13-0014-1_47
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-13-0013-4
Online ISBN: 978-981-13-0014-1
eBook Packages: EngineeringEngineering (R0)