
Abstract
Scissor unit deployable mechanism is widely used in aerospace and architecture, and the configuration design and kinematics analysis are two important problems that need to be solved in the application process. The first order and second order influence coefficient matrices are derived by coordinate transform. Kinematics analysis model and its calculating examples are presented, and the displacement, velocity and acceleration of all the hinged points are calculated. Moreover, the numerical example is used to verify the effectiveness of analysis method which also presented in this paper.
Access provided by CONRICYT-eBooks. Download conference paper PDF
Similar content being viewed by others


Keywords
- Scissor unit deployable mechanism
- Configuration design
- Influence coefficient matrices
- Kinematics analysis model
1 Introduction
Deployable mechanism presents contractility and develop ability characters, which allows convenient transport and storage, so as to widely applied on various areas, such as aviation, aerospace, civil engineering, and so on [1–3]. The first of application of deployable mechanism is the design of “mobile theater” by Pinero [4], and then Escring et al. [5] designed an indoor swimming pool cover of Seville, Spain. In 1970s, NASA and Cambridge university’s research on developable antenna promoted the development and application of deployable mechanism theories. On the basis of the equilibrium matrix theory, Calladine and Pellegrino of Cambridge University research the stability of deployable mechanism [6]. Chen [7] derived the kinematics differential equation for unfold process analysis by using null space basis of constraint Jacobian matrix. Zhang [8] adopting multi-body kinematics theory, combined with finite element method and Lagrange equation, established multi flexible-body kinematics equation for deployable mechanism.
In this paper, takes plane unit that consists of four scissor units as research object, Fig. 1 shows the plane deployable mechanism, which consists of four scissor units. The plane unit of experimental deployable mechanism is presented in figure, and dynamic model of scissor unit deployable mechanism is built on the basis of Cartesian coordinate.

The experimental scissor unit plane deployable mechanism
2 Configuration Design
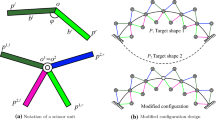
Scissor unit consists of two central mutually hinged and rotatable link members, a number of basic scissor link units are linked each other on terminal hinged point to compose basic piece unit plane deployable mechanism. In this paper, taking a hinged surface developable structure that consists of four scissor unit as an example to express the process of deduction.
The schematic diagram of Scissor unit surface developable mechanism is shown in Fig. 2, surface unit and serial number that assigned to hinged points of deployable mechanism is depicted in the figure.

The schematic diagram of scissor unit surface developable mechanism
Taking the surface developable mechanism that consists of four scissor units as an example, serial number of each hinged point is shown in Fig. 2, the first term of i and j subscript represents the scissor unit number, the second term of i and j subscript represents the hinged point number, α and β are geometric parameters, the first term of link length l subscript represents scissor unit number, the second term of link length l subscript represents link number.
The geometrical conditions that this plane of scissor units needs to satisfy (on V direction) are:
Since links are taken as rigid body on configuration design, thus
Then it is concluded that
Simultaneous solving the above equations, it is obvious that there are multiple solutions. This article selects a case as an example to carry out analysis, namely the lengths l of each link are equivalent conditions.
3 Kinematics Investigation
3.1 Influence Coefficient Method
Mechanism kinematic influence coefficient is proposed by Prof. Tesar and Dufy etc., and the influence coefficient method involves establishing 1-step exercise coefficient matrix and 2-step exercise coefficient matrix, the former refers to Jacobian matrix, and the latter refers to Hessian matrix [9–12].
For the deployable mechanism showed in above picture, if exercise is input by single-degree-of-freedom kinematic pair, which can be revolute pairs or movement pairs, then the position of mechanism’s any pole is determined. Pole’s position can be described by hinged point coordinates and pole’s angular position, thus
where,\( \Phi _{i} ,X_{i} ,Y_{\text{i}} \) refers to the angular position of reference frame and X, Y coordinate of reference point that selected for position determination of the i-th pole. Since the input motion parameter \( \varphi_{1} ,\varphi_{2} , \ldots ,\varphi_{N} \) varying with time.
The coordinates of Certain pole on deployable mechanism can be signed by \( U_{i} \left\{ {\Phi _{i} ,X_{i} ,Y_{i} } \right\}^{T} \), and deduce from (4),
A first order partial derivative is defined as the first order influence coefficient, and can be described by matrix by
where, the matrix J is called the first order influence coefficient.
Formula (8) illustrate the 1-step exercise coefficient matrix, namely Jacobi matrix.
Accordingly, the second order partial derivative can be calculated from Eq. (6), written as
Define the second derivative \( {{\partial^{2} U} \mathord{\left/ {\vphantom {{\partial^{2} U} {\partial \varphi_{p} \partial \varphi_{q} }}} \right. \kern-0pt} {\partial \varphi_{p} \partial \varphi_{q} }} \) as the second order kinematic influence coefficient, then formula (10) can be expressed by
where
The matrix H is called the second order influence coefficient.
3.2 Kinematics of Each Point
Before the research of kinematics of mechanism, proper fixed coordinate system and movement coordinate system should be established. The simplified form of kinematics equation can reduce the complicity of equation solving, and shorten the calculation time.
Taking the scissor unit deployable mechanism that shown in Fig. 3 as an example, Assuming pole’s length are equivalent, and when deploy the mechanism, which connects the support structure through revolute pairs at \( i_{12} \), \( i_{22} \), \( j_{22} \) 和 \( j_{42} \), and articulate with a slide block \( K_{0} \) by revolute pairs, then the slide block move along the OY shaft, and mechanism deploy along the OX direction. The origin of fixed coordinate system \( \sum {XOY} \) is located on the center of articulated point \( i_{22} \), OX axis is consistent with the direction of \( i_{22} j{}_{22} \), OY axis is established according to principle of Cartesian coordinates.

The scissor unit surface deployable mechanism
From the geometrical relationship of scissor unit deployable mechanism and coordinate, for any deploy angle \( \theta \), the coordinate transformation matrix from coordinate system of movement unit coordinate system \( \sum {x_{t} oy{}_{t}} \) to fixed coordinate system can be described by formula (13)
Because the configuration of surface deployable mechanism’s each unit is the same, thus
The origin of movement unit coordinate system \( \sum {x_{t} oy{}_{t}} \) corresponding to the x point of fixed coordinate system \( \sum {XOY} \), and x’s coordinate is
The coordinate transformation matrix from coordinate system \( \sum {x_{t} oy{}_{t}} \) to fixed coordinate system \( \sum {XOY} \) is
where, \( T{}_{o} = \left( {\begin{array}{*{20}c} {2l\,\cos \theta } & 0 \\ \end{array} } \right)^{T} \) , \( T_{o} \)’s first and second order derivative derivation of \( \theta \) respectively is
Using formula (16) can acquire \( T_{\text{ot}} \)’s first and second order derivation of \( \theta \) respectively is
Assuming \( {}^{o}r_{M}^{t} \) represent M point’s radius vector of unit mechanism in fixed coordinate system \( \sum {x_{t} oy{}_{t}} \), and \( {}^{t}r_{M}^{t} \) represent M point’s radius vector of unit mechanism in movement unit coordinate system, then
Using formula (21) to get the first and second order derivation of time, can obtain the velocity and acceleration of M point:
According to coordinate translation variables and M point’s coordinate, it is available that
\( {}^{o}J_{Mt}^{t} \) is the first order influence coefficient of line movement,\( {}^{o}H_{Mt}^{t} \) is the second order influence coefficient of line movement. Where, \( \left[ {\mathop {{}^{t}r_{M}^{t} }\limits^{ \bullet } } \right]_{\theta } = d\left( {\mathop {{}^{t}r_{M}^{t} }\limits^{ \bullet } } \right)/d\theta \), \( \left[ {\mathop {{}^{t}r_{M}^{t} }\limits^{ \bullet } } \right]_{\theta \theta } = d^{2} \left( {\mathop {{}^{t}r_{M}^{t} }\limits^{ \bullet } } \right)/d\theta^{2} \).
From above reasoning, the displacement, velocity and acceleration of surface deployable mechanism’s any point can be obtained. In other words, only needs to calculate the displacement, velocity and acceleration of five points: \( i_{11} ,i_{12} (i_{21} ),i_{22} ,j_{32} (j_{21} ),j_{22} \).
4 Illustrative Example
Taking the scissor unit surface deployable mechanism as an example, adopt pole length l = 600 mm, r = 2 mm, pole mass m = 1 kg, density \( \rho \;{ = }\;7800\;{\text{kg}}/{\text{m}}^{3} \), driven force that exerted on y axis direction through hinge point \( i_{11} \) is F = −60 N,the initial value of fixed coordinate system is \( \theta_{0} = \left( {\pi - 0.1} \right)rad \), Displacement, velocity and acceleration of each hinge point and constraint force of articulated link chain are shown in Figs. 4, 5, 6, 7, 8 and 9.

The displacement curve of hinge point on x direction

The displacement curve of hinge point on y direction

The velocity curve of hinge point on x direction

The velocity curve of hinge point on y direction

The acceleration curve of hinge point on x direction

The acceleration curve of hinge point on y direction
5 Conclusion
-
(1)
After hinge point \( i_{11} \) exerts driven force F on y direction, surface deployable mechanism complete deployment with varying acceleration. When the configuration angle \( \theta \gg 0 \), the angular acceleration of each component approximate to unchanging, deploy with approximate uniform angular acceleration, the linear acceleration of each component also approximate to unchanging, move with approximate uniform acceleration of each component approximate to unchanging.
-
(2)
From analysis of Figs. 4, 5, 6, 7, 8 and 9, When the configuration angle \( \theta \) of unit mechanism approach to \( \pi \), the angular acceleration of each component increase rapidly, the angular velocity vary fast, the linear acceleration of each component increase rapidly, the linear velocity vary fast, then cause larger constraint force on hinges.
-
(3)
According to the surface deployable mechanism, Illustrative example of kinematic analysis is given. By means of the coordinate transformation, the function of the displacement of each unit mechanism on the generalized coordinates is obtained. The displacement, velocity and acceleration of each hinge point are calculated, and the correctness of the method is verified.
References
Yan C, Zhong Y, Tarnai T (2005) Threefold-symmetric bricard linkages for deployable structures. Int J Solids Struct 42(8):2287–2301
Gan WW, Pellegrino S (2006) Numerical approach to the kinematic analysis of deployable structures forming a closed loop. Proc Inst Mech Eng Part C 220(7):1045–1056
Liew JYR, Krishnapillai A (2009) Deployable structures: US, US 20090199503 A1 2009
Pinero EP (1961) A reticular movable theatre. Architects’ J 134:299
Escrig F, Brebbia CA (1996) Mobile and rapidly assembled structures II, 1st edn. Computational and Mechanics Publications, Southampton
Calladine CR, Pellegrino S (1991) First-order infinitesimal mechanisms. Int J Solids Struct 27(4):505–515
Chen X (2000) Deployment Simulation and dynamic response analysis and structures design for deployable trusses. Zhejiang University, HangZhou (in Chinese)
Chong Zhang, Sanmin Wang, Yuan Ru (2007) On elasto dynamic characteristics of space deployable mechanism. Mech Sci Technol Aerosp Eng 26(11):1479–1482
Thomas M, Tesar D (1982) Dynamic modeling of serial manipulator arms. J Dyn Syst Meas Control 104(9):218–227
Freeman RA, Tesar D (1982) The generalized coordinate selection for the dynamics of complex planar mechanical system. J Mech Des 104:207–217
Duffy J (1980) Analysis of mechanisms and robot manipulators. Wiley, New York
Mohamed MG, Duffy J (1985) A direct determination of the instantaneous kinematics of fully-parallel robot manipulators. ASME paper 84-DET-114
Acknowledgments
The authors gratefully acknowledge the financial support of the National Natural Science Foundation of China (Grant No. 51175422).
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2017 Springer Nature Singapore Pte Ltd.
About this paper
Cite this paper
Li, J., Wang, S., Zhi, C., Sun, Y. (2017). Configuration Design and Kinematics Research of Scissor Unit Deployable Mechanism. In: Zhang, X., Wang, N., Huang, Y. (eds) Mechanism and Machine Science . ASIAN MMS CCMMS 2016 2016. Lecture Notes in Electrical Engineering, vol 408. Springer, Singapore. https://doi.org/10.1007/978-981-10-2875-5_62
Download citation
DOI: https://doi.org/10.1007/978-981-10-2875-5_62
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-10-2874-8
Online ISBN: 978-981-10-2875-5
eBook Packages: EngineeringEngineering (R0)