
Abstract
In Northwest Europe there is high need for advanced weed control methods. The use of crop protection chemicals has become stricter, and integrated pest management is required by regulations from the European Union. This need has resulted in the development of several advanced weed control principles based on a combination of proven technologies in combination with decision systems. A major problem with full-field-based methods is that the required settings depend very much on the specific conditions. Use of decision systems helps to improve these methods. Emerging new technologies as machine vision and GPS enabled more precise methods focused on the interrow and intrarow zone and on the plant itself. Some of the methods have already achieved a high level of development and resulted in commercially available weed control equipment with sensors and actuators for precise control. This chapter discusses the advancements achieved in NW Europe on mechanical weed control (full field, interrow and intrarow), physical weed control (steaming and flaming) and chemical weed control (full field, spot and plant oriented).
Access provided by Autonomous University of Puebla. Download chapter PDF
Similar content being viewed by others


Keywords
These keywords were added by machine and not by the authors. This process is experimental and the keywords may be updated as the learning algorithm improves.
1 Introduction
Weed control is still a major issue in modern agriculture, despite the development of several tools for weed removal in the past decades. According to Oerke (2006), overall potential losses (i.e. without crop protection) ascribed to weeds are 34 %. Weed management has always been one of the key issues in most agricultural systems (Kropff et al. 2008). The need for precision weed control in the future is increasing, in NW Europe and around the world. In NW Europe, which includes the UK, Ireland, Scandinavian countries, Germany, Belgium, France, the Netherlands and Luxembourg, the policy on the use of crop protection chemicals has become stricter, and in addition the number of allowed chemicals for crop protection is reducing. A parallel development is the increase of labour costs and at the same time a decreasing availability of skilled labour for work in agriculture, including weed control. The intensive cropping systems with high yields per hectare in NW Europe require an effective weed control to realise these high yields. Where in the past the trend for weed control in conventional agriculture was towards chemical weed control, we now see a trend towards more non-chemical weed control also in conventional (non-organic) farming. The strict policies on the use of crop protection chemicals in conjunction with the development of integrated crop protection schemes reinforce this trend towards an integrated pest management approach. This integrated approach is required to comply with societal demands on safe food production and environmental protection. Integrated pest management is also required by regulations from the European Union (European Commission 2009). As part of this integrated approach, cropping systems have to be changed and weed control methods after they have emerged have to be improved. An example of this change in cropping system is the precision drilling of seeds (Griepentrog et al. 2005) leading to new opportunities in crop management. An example is GeoSeed seeding principle by the Kverneland Group enabling hoeing in four different directions.
In NW Europe a wide variety of crops is grown. The most important crops in area are cereals as wheat and barley, sugar beets, potatoes and maize (mainly for silage). Besides that, at several places vegetable crops like onions, carrot, cabbage, lettuce and leek are grown. Other important crops are beans, peas, rape or flower bulbs. In NW Europe no rice, soybeans or cotton is grown. Especially in the smaller crops, often high-value crops, weed control is becoming more and more a problem due to the restriction of the use of crop protection chemicals, and several of these have very open canopy structure in the beginning of the growth, giving ample space to weeds.
Mechanical weed control was for some decades back the domain of mainly organic farmers. Conventional farmers considered mechanical weed control as old fashioned and techniques of the past. The introduction of automation and electronics in agriculture opened new roads for development of modern weed control. Where in the past the organic farmers were the driving force for development in mechanical weed control, we now see that these methods are more and more adopted by conventional farmers as part of their integrated crop protection scheme. This trend also fits the development of more precise chemical control methods, focused on only applying the chemicals where needed and in quantity related to the need instead of whole-field application of maximum amounts to be sure that all weeds are controlled.
Over the past two decades, several weed sensing systems and precision implements were developed, but there are still some barriers. Two main barriers are the lack of truly robust weed recognition methods and limitations in the capacity of highly accurate spraying and weeding apparatus (Christensen et al. 2009).
In this chapter the main focus is on research on weed control and weed control applications in NW Europe presented in 2005 or later. The research shows the trend towards the future and is the basis for the further development of advanced weed control in NW Europe and the driving force for modern weed control where low or no input of chemicals is desired or even required. Where available, results from practice are presented, especially if they are a spin-off of previous research. Table 10.1 gives for NW Europe an overview of the machinery available for each method and the type of crops where the machinery is applied.
2 Applications: Mechanical Weed Control
Mechanical weed control methods are in general attractive because of the high capacity, wide applicability and low costs (Dedousis and Godwin 2005). A major limitation however is the variable effectiveness and the limited selectivity at early crop stages.
2.1 Full-Field Oriented
There is a wide range of tools available for mechanical weed control, and overviews are given, for example, by Cloutier et al. (2007) and Weide et al. (2008). Cloutier et al. (2007) present an overview of three main techniques for weed management: use of tillage, cutting weeds and pulling weeds. These techniques are very general and in principle applicable worldwide. Weide et al. (2008) describe the state of the art of different machinery for mechanical intrarow weed control. They also discussed the shortcomings and prospects for further research, development and implementation of mechanical intrarow weed control. This machinery is usually used in crops grown on rows that have open canopy architecture like sugar beet, cabbages, carrots and onions. There is a large number of studies available on whole crop-oriented weed control (Melander et al. 2005; Kurstjens 2007; Wei et al. 2010).
Important aspects are timing and intensity of the weed control operation. An important criterion is the selectivity of the operation, which is affected by timing and intensity, and, of course, the method itself and also depends on the crop and weed species. The main problem with whole crop-oriented weed control is that the required settings (i.e. aggressiveness of the cultivation) are very situation dependent. Ferrero et al. (2007) studied the mechanical weed control in organic soybeans and maize. Methods used were flame weeding, spring tine harrowing and interrow hoeing and were applied at different growth stages. They conclude that these methods have a promising potential, but they also mention that the intervention timing is a crucial factor to have effective weed control together with crop selectivity. Rasmussen et al. (2008) investigated the effects of row spacing, timing, direction and orientation on crop/weed selectivity on post-emergence weed harrowing in spring barley. They found a significant effect of row spacing only in late growth stages. The direction was found to be only significant in one out of two experiments. There was no difference for repeated harrowing between carrying it out in the same orientation and alternative orientations back and forth. They also did not find a significant effect of timing on selectivity. They suggested an effect of driving speed on selectivity but mentioned also that this needs further investigation. Lundkvist (2009) studied the effect of timing and frequency of weed harrowing on weed abundance and pre- and post-emergence weed harrowing sequences in spring cereals and peas. The combination of pre- and post-emergence harrowing provided the best control but was accompanied with yield losses of 11–14 %. For early emerging weeds pre-emergence weeding provided sufficient control, whilst for later emerging weeds pre-emergence weeding combined with one or two harrowing treatments after crop emergence was needed for effective control.
These different studies show varying results, and no general conclusions can be drawn that can be used as a guideline for whole crop-oriented weed control operations.
Duerinckx et al. (2005) investigated in a lab experiment the tine settings of a spring tine harrow to point out the effect of varied implement settings and operational conditions on the weeding performance. They looked at the mechanical actions of a tine harrow in two different soils and looked at the effects of varied implement settings and operational conditions on the tine weeding performance. The tine was pulled in soil bins without plants in order to avoid biological variances. High selectivity could be achieved with a low speed, a thin tine and a trailing or vertical tine orientation. Effective weed control however would require a high speed, a deep penetration, a standard thick tine and a leading tine operation. Since high selectivity and high efficiency need different tine settings, these settings should be based on the intended effects. Mouazen et al. (2007) mentioned that soil texture and soil physical conditions have to be taken into consideration in the adjustment of machines to realise an optimal weed control with minimal crop damage. Weis et al. (2008) described an automatically controlled real-time finger weeder developed at the University of Hohenheim in Germany. The finger weeder is to be used on experimental fields with winter cereals and summer cereals. Bi-spectral cameras make images of the crop and weeds before and after harrowing, and a soil sensor measures the soil compaction, related to resistance to mechanical action. All information is processed online and used to determine the aggressiveness of the treatment by changing the angle of the harrow tines. The adjustment is based on the highest weed control with the least crop damage. Specific details are not given.
Rasmussen et al. (2010) concluded, based on their work on the timing of post-emergence weed harrowing in Denmark and the conclusions of Rasmussen et al. (2008) and Pardo et al. (2008), that settings and use of cultivators have to be based on the immediate crop and weed response. The main reason for this is that it is impossible to predict crop and weed responses from given settings and use of implements. They mention that this is also the main reason for the development of the finger weeder of Weis et al. (2008).
2.2 Interrow Weeding
The most important innovation for interrow weeding are guidance systems that take over the steering function from the driver. With these guidance systems higher forward speeds and/or larger widths of the row between the crops can be cultivated. Pullen and Cowell (2006) mentioned that knowledge of the effect of implement geometry on the hoe path and the accuracy of a weeder steered with a mechanical steering linkage in response to a given guidance signal are very important for the development of accurate automatic steering systems for rear-mounted weeders. Most critical factors were found to be the steering ratio and the position of the hoe in relation to the follower. The performance was not significantly influenced by the longitudinal location of the instantaneous centre of rotation, the follower position, the steered wheels and the steered wheel axle.
Bonte (2011) reported on a research organisation that implemented the camera and guidance system of Garford on an existing hoe. The system performed well in grains, cabbage and sugar beets, whilst the results were varying in onions. With dry soil conditions, it was difficult for the camera system to see a difference between the soil and the onions. In grains some adjustments were necessary in the presence of wind. Merfield (2010) described the Robocrop and Eye-Drive from CLAAS AGROCOM (formerly ECO-DAN) systems as the opposite of the blind GPS steering systems. The vision-based systems can follow the crop rows and adapt to the crop growth status whilst maintaining a high capacity and weed control result. On the other hand, the blind GPS systems can control weeds close to the crop row even before the crop has emerged after seeding.
2.3 Intrarow Weeding
Intrarow weeding is a very challenging cultivation. Weeds grow also close to the plants, and the distance between the plants in the row is despite precision planting or seeding not always the same. Another complication is that it is not always easy to distinguish the weed from the crop, especially in early growth stages.
The Garford Robocrop from the UK is one of the few commercially available intrarow weeding machines. Important parts of this machine are based on the research work of Dedousis and Godwin (2005), O’Dogherty et al. (2007), Dedousis and Godwin (2008) and Tillett et al. (2008). The machine has a rotating horizontal disc with a cut-out sector. The disc moves in the row, and the cut-out sector enables the disc to pass the plants without making contact with them. The weeds are eliminated by cutting them and covering them with soil. The position of the plants in the row and relative to the rotating disc is determined with machine vision.
Dedousis and Godwin (2005) developed for this a mass flow soil dynamics model as an aid for the design of implements that control weeds by a shallow undercutting cultivation. The purpose of the model is to predict the lateral and forward displacement of soil when it is undercut by shallow working implements, as the rotating disc.
Dedousis and Godwin (2008) described the design of the rotating disc hoe. Main requirements for the design were a minimum intrarow area of 150 mm, treat weeds close to the crops with a small undisturbed zone (50 mm) and a forward speed of 1 m/s. The design of the disc was a compromise between maximum cultivated area and the tolerance to lateral and angular misalignment. Tillett et al. (2008) analysed the performance of the system in transplanted brassicas and headed lettuce with a minimum in-row plant spacing of 300 mm. The results showed a reduction of the weeds by 77, 87 and 65 % immediately after the treatment. Regrowth reduced the percentages for the first two treatments after two weeks to 74 % and 66 %, respectively. The forward speed was 1.8 km/h, which was relatively slow compared to normal intrarow cultural practice (about 4 km/h). However, more research is needed to increase the forward speed. The expected top speed is related to the maximum disc rotor speed of two plants per second (3.6 km/h for an in-row plant spacing of 0.5 m).
Dedousis and Godwin (2008) made an economic analysis of the system. They compared the disc hoe, a tractor-mounted sprayer, interrow and hand weeding and hand weeding solely. For the comparison economic cost calculator software was used; this software had over 50 implement selections. The results showed that for areas above 50 ha the disc hoe was a cheaper strategy compared to a tractor-mounted sprayer and hand weeding. For a 125 ha treated area, the calculated costs for the disc hoe were £ 81 ha−1, and for the tractor-mounted sprayer and the interrow and hand weeding combination, the costs were, respectively, £ 100 ha−1 and £ 139 ha−1.
Bonte (2011) reported the use of the Garford Robocrop in the Netherlands. A contractor uses the machine in organic maize, sugar beets and chicory. The machine performs well when the weeds are small. An advantage is also that the machine works very precise. Another advantage mentioned is that the machine does not need a GPS, which is advantageous in woody areas where receipt of GPS signals may be problematic.
Beunk (2011) reported on a contractor using a twelve-row Robocrop of Garford. The power requirement of the machine is about 60 kW (80 hp) for a four-row machine and 75 kW (100 hp) for a six-row machine. In addition the oil requirement is about 8 l/min per row. The machine of this contractor performed reasonably in sugar beets but did yet not perform well in chicory.
Nørremark et al. (2008) developed and optimised a side-shift and cycloid hoe system for intrarow hoeing. They also quantified and evaluated the performance under field conditions. The whole system relied on RTK-GPS positional information for control of the autonomous tractor, side-shift and cycloid hoe. They realised distances between tine trajectories and artificial plants in longitudinal direction between 47 ± 37 mm (p = 0.95) and 80 ± 42 mm (p = 0.95). The latter resulted in some non-hoed areas between uncultivated zone and tine trajectories. In transversal direction distances ranged from 0 ± 16 mm (p = 0.95) and 17 ± 21 mm (p = 0.95), resulting in some critical tine trajectories in the near proximity of the uncultivated zone for the latter value.
Nørremark et al. (2009) evaluated a large number of mechanical tools for the removal of weeds close to plants. Weeds that germinate close to individual crop plants have the most negative impact on crop yield. They evaluated concepts needed to have high degree of selectivity and were evaluated against a set of ten criteria. High-precision tillage and thermal weed control by laser were found to be the most promising weed control concepts to operate close to the plants.
Van Evert et al. (2009) developed a vision-based system that uses textural analysis to detect broad-leaved dock (Rumex obtusifolius L.) against a grass background, as step towards the automated mechanical control of this grassland weed that is hard to control in a non-chemical way. Van Evert et al. (2011) described a prototype robot system that autonomously detects broad-leaved dock and, once detected, destroys the weed by a cutting device. In a field test 93 % of the weeds were encountered, and effective weed control was achieved in 73 % of the cases. In only a few cases, a weed removal action was executed whilst there was no weed present. The estimated required time to weed 1 ha with 1,000 weeds is about 7 h. This type of weeding operation (grassland inspection once a year is sufficient and a working time from May to October) make it possible to cover a large area by one robot, reducing the operating costs per ha considerably. Annual costs of the robot were estimated to be about € 10,000. The capacity is such that this robot could service the area of about five typical dairy farms (50–100 ha each). The costs are then € 2,000 per farm per year and the farmers indicated that these costs are acceptable. This analysis shows that autonomous weed control becomes feasible when enough working hours per year can be realised. Such a system then should be able to operate in different crops, preferably crops that need weed control at different times in the year and during many hours a day, preferably day and night.
Weide et al. (2005a, b) mentioned the Pneumat weeder. This weeder uses compressed air to blow the weeds out of the row. They mentioned as advantages that it can control larger weeds than a finger weeder and it can be used in crops with a larger width of the crop row since the compressed air can travel distances larger than a finger weeder can cover. For different weeder types a better performance can be realised when the steering and depth control become more accurate and the machines can be easier and quicker adjusted. In addition Weide et al. (2008) mentioned the best weeding effect is obtained when working depth, air pressure and tractor speed are tailored to each other and adjusted according to weed growth and crop growth stages. A disadvantage is the large power requirement (60 kW for a six-row machine), which is about twice the requirement of an ordinary hoe.
Some experiences from precise hoeing machines by Applied Plant Research (PPO) in the Netherlands are reported by Beunk (2011). The French Sarl Radis hoeing machine is a simple machine that uses a light barrier to detect weeds. The machine acts in the crop row and the hoe swerves when the light beam is interrupted. Therefore, it is necessary that the crop is higher than the weeds. The large trajectory of the hoe limited the driving speed of the machine to about 3 km/h. This low forward speed is a limitation for use of this machine on a large scale in the Netherlands (Bleeker 2008). Another limitation is the use in crops with an open structure, as, for example, onion, where the light beam is not regularly interrupted (Weide et al. 2008).
Applied Plant Research (PPO) in the Netherlands improved the Sarl Radis machine in several aspects. One hoe was replaced by two hoes which increased the travel speed to about 7.5 km/h, and it also increased the area covered by the hoes. The actuators were also replaced by faster ones which also increased the area covered by the hoes (Beunk 2011).
Other techniques in the Netherlands Beunk (2011) reported on are the Robovator developed by Poulsen in Denmark and the intrarow weeder of Steketee. The Robovator is a hoeing machine that is based on plant recognition and uses cameras to detect weeds. The machine is used since short time in iceberg lettuce. The camera is mounted under a hood, and lighting is used to illuminate the crop rows.
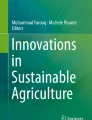
The intrarow weeder of Steketee (Hemming et al. 2011) (Fig. 10.1) uses high-resolution cameras mounted in a hood. Strong xenon lamps are used to illuminate the crop row; this makes it possible for the machine to work in sunny conditions. Crop plants are recognised based on shape, colour and location. The area between the crop plants is weeded by two pneumatically guided hoes. The minimum plant distance in the row is 6 cm. Maximum driving speed with a 10 cm in-row plant spacing is 2 km/h and increases to 6 km/h with a 50 cm in-row plant spacing.

Steketee mechanical intrarow weed control system. Cameras detect the plants and the weeds are controlled by pneumatically guided hoes
The machines from Steketee, Poulsen (Robovator) and Garford are commercially available in NW Europe. They are targeted at precision-seeded crops and transplanted crops. As such the machines are now spreading over Europe in crops like lettuce, sugar beet, chicory and different cabbage species.
3 Applications: Physical Weed Control
This section covers the applications that have been developed and tested for physical weed control. Physical weed control is mainly used when mechanical weeding is not sufficient (Ascard et al. 2007). Ascard et al. (2007) made an extensive review on the use of thermal methods for weed control. These methods include the use of fire, flaming, infrared radiation, hot water, steam, electrical energy, microwave radiation, ultraviolet radiation, lasers and freezing temperatures. Only a few of these (flame weeding and to some extent infrared radiation, steam and electrocution) are used commercially, usually as an alternative to herbicides or when mechanical methods are not sufficient. Some of these methods have a high-energy requirement but, on the other hand, leave no chemical residue in the field. A cost benefit analysis to compare this method with other weed control methods, technology development to reduce the costs and improve the energy efficiency and the integration at farm level are necessary for a greater adoption. However, the availability of inexpensive herbicides and their acceptability hampers research on these subjects.
The full-field methods for thermal weed control rely on the selectivity of the crop plants to withstand a temporary increase in temperature longer than the small weed seedlings nearby the crop. The between crop row and plant-specific methods can use higher amounts of energy and thereby reach higher efficacies, though detection systems are required, or only parts of the cropped field (interrow or weed patches) can be treated.
Though recently, for steaming, Melander and Kristensen (2011) investigated the effects of soil type, moisture, structure and heat duration and concluded that 80 °C soil temperature should be sufficient to ensure satisfactory weed control. Bàrberi et al. (2009) investigated the use of additional activating compounds (KOH and CaO) during steaming. On some weed species this had a positive effect on the weed control, though the amount of activating compounds that should be added has still further to be investigated. Malkomes and Zwerger (2007) used steaming and fumigation to control weed seeds and weed seedlings and investigated during a period of 19 months the amount of germinated weeds. The amount of weed seedlings was well reduced though the methods are not yet used in practical situations.
Using lasers to control weeds was investigated by Heisel et al. (2001) and recently by Gude et al. (2010). Gude et al. (2010) showed in cooperation with the Fraunhofer Institute in Germany that it is possible to put enough energy in the growth points of weed seedlings to stop their growths. The challenge is to get the laser beam in the right position with the help of microelectronic mirroring systems. Heisel et al. (2001) used the laser as a means to cut the weeds close to the soil and compared the performance to cutting with scissors. They concluded that CO2 lasers have the potential of being used as a cutting device for weed control.
Sartorato et al. (2006) published on the potential of microwaves for weed control. Microwave heating of plant parts could overcome the risks of fire by flame weeding or the heavy loads of water carrying by steam treatments. The microwave efficiency has to be increased to make it a competitor to other thermal weed control methods.
One of the manufacturers of physical weed control technologies, HOAF Infrared Technology (Oldenzaal, the Netherlands), combined flaming and infrared technologies in one machine for weed control and potato haulm desiccation. This combination causes that proteins congeal and cells burst open and consequently plants start to wilt. The HOAF machines work on the full field or interrow. The machines of this manufacturer are sold worldwide and used in organic farming. Another physical weed control machine that is working selectively on the plants and not full field is a Poulsen machine (Hvalso, Denmark) (Patent No PCT/DK2005/000311). This flame weeder uses camera technology to detect the crop plants and has fast switching flames that turn off in presence of crop plants and in that way control the weed seedlings in between the crop plants. The system has been tested at least in sugar beet and onions and is commercially available in Denmark, Germany and the Netherlands.
4 Applications: Chemical Weed Control
4.1 Full-Field Oriented
In broadcast application spraying, advances in technology have been achieved recently in Europe. One achievement implemented in practice is patch spraying of herbicides (Gerhards and Christensen 2003). Gerhards and Oebel (2006) described the practical experiences with such a system for site-specific weed control in arable crops. The system uses a separate mapping stage with cameras, after which a map-based application stage follows on the sprayer in a patch size of 3 × 12 m. On these patches three different tank mixes can be applied by a modified Kverneland Rau sprayer, based on the presence of certain weeds (Weis et al. 2008). For further adoption of the patch spraying technology on weeds in practice, real-time image processing to control the field sprayer sections is required (Miller and Lutman 2008). Furthermore, they indicate that the potential financial benefits of patch spraying of herbicides are relatively small, and that the future of these systems may be driven by environmental factors, like reduction of emissions to no crop zones like waterways and nature parts alongside crop fields. In NW Europe with relatively small fields, except some areas in Eastern Germany, the benefits for inter- and intra-row spraying of herbicides are expected to be higher. At the same time introduction of automatic section control and even individual nozzle control is sold as add on to sprayers to reduce overlapping on headlands. These techniques are also used to realise patch spraying in practice.
Another system to reduce the amount of herbicides used during weed control is the minimum lethal herbicide dose (MLHD) system. In this system the label recommended dose is reduced or split based on recommendations of a decision support system (DSS). The DSS takes into account many factors that interact like weed species, weed stage, crop stage, weather and soil conditions, spray technology, formulation and economics (Kempenaar et al. 2011). After spraying the reduced dose, the photosynthesis activity of the weeds is measured by mobile handheld photosystem I or photosystem II fluorescence measurement devices (Kempenaar and Spijker 2004). Changes in leaf photosynthesis of plants can be measured 2–3 days after herbicide treatment. When the photosynthesis level is below a threshold level, the weed will be killed by the minimum lethal herbicide dose, and no repeated spray is required to reach a good control level. Measurements on 20 plants per key weed species are required to get a good idea of the effects of the spray. To date, approximately 200 mobile photosynthesis measurement devices are used within the Netherlands to apply the MLHD system in practice (Kempenaar et al. 2011).
Online measuring of crop biomass and directly adjusting the spray volume is used within the SensiSpray system (Figs. 10.2 and 10.3) developed in the Netherlands. This so-called Canopy Density Spraying (CDS) is based on measurement of crop biomass by NDVI with a GreenSeeker sensor. Based on the NDVI measured, the spray volume is adjusted up or down in accordance to the requirements of the crop and weed density. The system is mainly used in the Netherlands for potato haulm desiccation, though other applications where crop biomass is changing are foreseen as well. Between two and ten systems have been sold of different brands and are being used on commercial farms. It could be used for weed control as well, as the NDVI of weed patches is different from the regular crop.

SensiSpray system mounted on a sprayer with air support to prevent drift

Detail of the SensiSpray spraying system. The GreenSeeker sensor is used to determine the amount of biomass, and the spray volume is adjusted by switching on and off one to four nozzles in the nozzle holder
4.2 Plant Specific and Row Oriented
Weed plant-specific and row-oriented weed control methods are mainly used in organic farming, as chemical methods are not to be used in organic farming. On the other hand, in conventional farming the weed-specific and row-oriented approach for application of herbicides is efficient and can outperform traditional broadcast spray application techniques of herbicides when it concerns the amount and type of herbicides used.
In Denmark and in the Netherlands, several systems were topic of research to weed plant specific by applying herbicides. These systems used micro-sprayer application techniques. The micro-sprayer concept described by Lund et al. (2006) in Denmark combines recognition, spraying and robot technology. A robot vehicle guided by RTK-GPS along the crop seed line carries a camera for weed seedling detection as well as a micro-sprayer. The first prototype had a 126 mm spray boom with 40 needles (hypodermic tubes), divided in eight sections, each controlled by a solenoid valve, delivering the spray fluid on exact positions on the weed seedling leaves. A newer prototype had a boom of 100 mm with 20 individually controlled tubes. With this version it was possible to spray on 5 × 5 mm weed cells in the field.
Experiments by Sogaard and Lund (2007) showed that the average of absolute distances of the newer prototype in trial tests was ±2.6 mm in single droplet positioning. With the application of this system in practice, the amount of glyphosate can be reduced to 4 g · ha−1 for a full control of 100 weed seedlings per m2. This is a reduction in spray volume of two orders of magnitude, compared to broadcast spraying (Sogaard and Lund 2007). To apply micro-spraying in practice, research has focused on the spray formation and spray liquid transport to the plant as well. Lund et al. (2008) mentioned that the dynamics of a spray of an on/off spray system are quite different from a conventional spray system used in agriculture. For that reason it is important to mention the biological efficacy of such a system and relate it to conventional spray technologies.
A weed control system for removal of volunteer potato plants within crop rows was developed by Nieuwenhuizen et al. (2010b). The system (Fig. 10.4) relies on detection of the volunteer potato plants within sugar beet fields by machine vision. Two cameras, visible RGB and invisible near-infrared, were used under controlled light conditions under a cover (Nieuwenhuizen et al. 2008). Real-time image processing algorithms distinguished in an adaptive manner the crop from the weed plants at square centimetre level. Directly after the detection stage, a micro-sprayer deposited droplets containing glyphosate on the volunteer potato plants. The formulation of the spray liquid was adjusted in a way that a thicker viscous fluid prevented splashing of the systemic herbicide to the neighbouring sugar beet plants. With this system up to 77 % of weed, potato plants were killed within the sugar beet crop row (Nieuwenhuizen et al. 2010a). This was accompanied with only 1 % of unwanted death of sugar beet plants. The accuracy of the spraying system was ±14 mm in longitudinal and ±7.5 mm in transversal direction (Nieuwenhuizen et al. 2010c).

Weed control system for control of volunteer potatoes within rows of sugar beets. Two cameras are mounted under the hood and the volunteer potatoes are micro-sprayed with the spray unit in the rear
Nieuwenhuizen (2009) compared the biological efficacy of different droplet densities of the developed micro-sprayer with a flat fan nozzle in the control of volunteer potatoes. The results showed that similar efficacies as a flat fan nozzle could be realised with high droplet densities (3,022 droplets m−2). Lower droplet densities (622 and 1,330 droplets m−2) showed lower efficacies.
The system has not yet been introduced to commercial practice in the Netherlands, as an extension in the number of weeds that should be detected has still to be made. The possibilities for adaption in NW Europe are rather high. The use of chemicals will more and more be restricted due to national and European legislation. This will increase the demand for methods that are effective but use much less chemicals by only applying what is needed to kill the weeds. This will especially be the case for the smaller crops, i.e. the crops with a limited acreage. These crops are for crop protection companies of less interest for the development and admission of crop protection chemicals.
5 Conclusions
Overall, full-field-based methods for weed control are the most mature or market available in NW Europe. The methods based on direct interaction with individual plants are the least mature. These methods require a very precise direction of the energy in the case of flaming or steaming, the chemical in case of a chemical-based weed-specific method or the very precise control of a hoe. This is still very difficult to achieve in a continuously varying environment in open fields. The most mature is the interrow weeding. The weeding principle is used for several decades already, and new technologies enable precise steering between the rows making the principle more effective.
For the near future, non-chemical weed control methods are preferred in NW Europe. These consist of mechanical weeding assisted by advanced machine vision-guided inter- and intrarow weeders. Mechanical weed control methods have to be improved with sensors to allow for online control of the aggressiveness and performance of weeding tools. Chicouene (2007) discussed a kind of conceptual framework that deals with the factors that influence the sensitivity of the plant to being damaged and the type of damage induced by the different implements. A proper system requires the choice of the right implement, a proper adjustment of the implement and the correct time for intervention. The types of damage inflicted on each plant should be analysed, and the weeds should be classified by different forms in which they occur and the various ways the implements inflict damage on them.
Chemical weed control methods may still be required, but the application of non-chemical and chemical weed control will have to be assisted by decision support systems to increase the efficacy and handle the variability in efficacy due to changes in weather conditions. Chikowo et al. 2009 concluded that a combination of various integrated weed management techniques allows both the long-term control of arable weeds and a significant reduction in the reliance on herbicides.
References
Ascard J, Hatcher PE, Melander B, Upadhyaya MK (2007) Thermal weed control. In: Upadhyaya MK, Blackshaw RE (eds) Non-chemical weed management: principles, concepts and technology. CABI, Wallingford, pp 155–175
Bàrberi P, Moonen AC, Peruzzi A, Fontanelli M, Raffaelli M (2009) Weed suppression by soil steaming in combination with activating compounds. Weed Res 49(1):55–66. doi:10.1111/j.1365-3180.2008.00653.x
Beunk H (2011) Schoffelen op weg naar elektronische toekomst. Landbouwmechanisatie, vol 62. Agrimedia, Wageningen
Bleeker PO (2008) Schoffel Robrocrop ruimt onkruid in de rij op. http://edepot.wur.nl/53012
Bonte E (2011) Garford Robocrop. Landbouwmechanisatie, vol 62. Agrimedia, Wageningen
Chicouene D (2007) Mechanical destruction of weeds. A review. Agron Sustain Dev 27(1):19–27. doi:10.1051/agro:2006012
Chikowo R, Faloya V, Petit S, Munier-Jolain NM (2009) Integrated Weed Management systems allow reduced reliance on herbicides and long-term weed control. Agric Ecosyst Environ 132(3–4):237–242. doi:10.1016/j.agee.2009.04.009
Christensen S, Søgaard HT, Kudsk P, Nørremark M, Lund I, Nadimi ES, Jørgensen R (2009) Site-specific weed control technologies. Weed Res 49(3):233–241. doi:10.1111/j.1365-3180.2009.00696.x
Cloutier DC, van der Weide RY, Peruzzi A, Leblanc ML (2007) Mechanical weed management. In: Upadhyaya MK, Blackshaw RE (eds) Non-chemical weed management: principles, concepts and technology. CABI, Wallingford, pp 111–135
Dedousis AP, Godwin RJ (2005) Precision mechanical weed control. European Weed Research Society, Doorwerth
Dedousis AP, Godwin RJ (2008) The rotating disc-hoe-an overview of the system for mechanical weed control. In: American Society of Agricultural and Biological Engineers annual international meeting 2008, Providence, RI, pp 451–463
Duerinckx K, Mouazen AM, Anthonis J, Ramon H (2005) Effects of spring-tine settings and operational conditions on the mechanical performance of a weed harrow tine. Biosyst Eng 91(1):21–34. doi:10.1016/j.biosystemseng.2005.02.005
European Commission (2009) Directive number 128 of 2009. Off J Eur Union L 309:16
Evert FK van, Polder G, van Der Heijden GWAM, Kempenaar C, Lotz LAP (2009) Real-time vision-based detection of Rumex obtusifolius in grassland. Weed Res 49(2):164–174. doi:10.1111/j.1365-3180.2008.00682.x
Evert FK van, Samsom J, Polder G, Vijn M, H-Jv D, Lamaker A, van der Heijden GWAM, Kempenaar C, van der Zalm T, Lotz LAP (2011) A robot to detect and control broad-leaved dock (Rumex obtusifolius L.) in grassland. J Fld Robot 28(2):264–277. doi:10.1002/rob.20377
Ferrero A, Busi R, Tesio F, Vidotto F (2007) Weed control by mechanical means in organic soybean and maize. European Weed Research Society, Doorwerth
Gerhards R, Christensen S (2003) Real-time weed detection, decision making and patch spraying in maize, sugar beet, winter wheat and winter barley. Weed Res 2003(43):385–392
Gerhards R, Oebel H (2006) Practical experiences with a system for site-specific weed control in arable crops using real-time image analysis and GPS-controlled patch spraying. Weed Res (Oxf) 46(3):185–193. doi:10.1111/j.1365-3180.2006.00504.x
Griepentrog HW, Nørremark M, Nielsen H, Blackmore BS (2005) Seed mapping of sugar beet. Precis Agric 6(2):157–165. doi:10.1007/s11119-005-1032-5
Gude J, Damerow L, Schulze-Lammers P (2010) Weeding by laser application. Paper presented at the third conference on precision crop protection, Bonn
Heisel T, Schou J, Christensen S, Andreasen C (2001) Cutting weeds with a CO2 laser. Weed Res 41(1):19–29. doi:10.1046/j.1365-3180.2001.00212.x
Hemming J, Nieuwenhuizen AT, Struik LE (2011) Image analysis system to determine crop row and plant positions for an intra-row weeding machine. In: CIGR, Funabori, Japan, 19–23 Sept 2011, p 7
Kempenaar C, Spijker JH (2004) Weed control on hard surfaces in The Netherlands. Pest Manag Sci 60(6):595–599. doi:10.1002/ps.863
Kempenaar C, Lotz LAP, Snel JFH, Smutny V, Zhang HJ (2011) Predicting herbicidal plant mortality with mobile photosynthesis meters. Weed Res 51(1):12–22. doi:10.1111/j.1365-3180.2010.00823.x
Kropff MJ, Bastiaans L, Kempenaar C, Van Der Weide RY (2008) The changing role of agriculture and tomorrow’s weed research agenda. J Plant Dis Prot 21:3–8
Kurstjens DAG (2007) Precise tillage systems for enhanced non-chemical weed management. Soil Tillage Res 97(2):293–305. doi:10.1016/j.still.2006.06.011
Lund I, Sogaard HT, Graglia E (2006) Micro-spraying with one drop per weed plant. Danish Institute of Agricultural Sciences, Tjele
Lund I, Jensen PK, Olsen HJ (2008) Aspects of spraying small geometric cells. In: Alexander LS, Carpenter PI, Cooper SE et al (eds) International advances in pesticide application, Robinson College, Cambridge, UK, 9–11 January 2008, Aspects of applied biology 84. Association of Applied Biologists, Wellesbourne, pp 273–278
Lundkvist A (2009) Effects of pre- and post-emergence weed harrowing on annual weeds in peas and spring cereals. Weed Res 49(4):409–416. doi:10.1111/j.1365-3180.2009.00718.x
Malkomes HP, Zwerger P (2007) Influence of soil disinfection methods on the weed seed potential and on microbial activities in the soil (Einfluss von Umweltfaktoren auf die Samenphase annueller Unkrßuter insbesondere unter dem Gesichtspunkt der Unkrautbekämpfung). Gesunde Pflanzen 59(2):77–86. doi:10.1007/s10343-007-0150-6
Melander B, Kristensen JK (2011) Soil steaming effects on weed seedling emergence under the influence of soil type, soil moisture, soil structure and heat duration. Ann App Biol 158(2):194–203. doi:10.1111/j.1744-7348.2010.00453.x
Melander B, Rasmussen IA, Bàrberi P (2005) Integrating physical and cultural methods of weed control-examples from European research. Weed Sci 53(3):369–381. doi:10.1614/ws-04-136r
Merfield CN (2010) Precision Ag for ecological farming systems. In: LandWISE conference 2010: know your farm – with precision Ag. LandWISE Inc., Havelock North, 12–13 May 2010
Miller PCH, Lutman PJW (2008) A review of the factors influencing the technical feasibility and potential commercial uptake of the patch spraying of herbicides in arable crops. In: Alexander LS, Carpenter PI, Cooper SE et al (eds) International advances in pesticide application, Robinson College, Cambridge, UK, 9–11 January 2008, Aspects of applied biology 84. Association of Applied Biologists, Wellesbourne, pp 265–272
Mouazen AM, Duerinckx K, Ramon H, Anthonis J (2007) Soil influences on the mechanical actions of a flexible spring tine during selective weed harrowing. Biosyst Eng 96(1):7–18. doi:10.1016/j.biosystemseng.2006.09.007
Nieuwenhuizen AT (2009) Automated detection and control of volunteer potato plants. Wageningen University, Wageningen
Nieuwenhuizen AT, Van Der Steen S, Hofstee JW, Van Henten EJ (2008) Real time vision detection of weed potato plants in sugar beet fields. In: Conference: agricultural engineering – Land-Technik 2008: Landtechnik regional und International, Stuttgart-Hohenheim, pp 173–178
Nieuwenhuizen AT, Hofstee JW, van de Zande JC, Meuleman J, van Henten EJ (2010a) Classification of sugar beet and volunteer potato reflection spectra with a neural network and statistical discriminant analysis to select discriminative wavelengths. Comput Electron Agric 73(2):146–153. doi:10.1016/j.compag.2010.05.008
Nieuwenhuizen AT, Hofstee JW, van Henten EJ (2010b) Adaptive detection of volunteer potato plants in sugar beet fields. Precis Agric 11(5):433–447. doi:10.1007/s11119-009-9138-9
Nieuwenhuizen AT, Hofstee JW, van Henten EJ (2010c) Performance evaluation of an automated detection and control system for volunteer potatoes in sugar beet fields. Biosyst Eng 107(1):46–53
Nørremark M, Griepentrog HW, Nielsen J, Søgaard HT (2008) The development and assessment of the accuracy of an autonomous GPS-based system for intra-row mechanical weed control in row crops. Biosyst Eng 101(4):396–410. doi:10.1016/j.biosystemseng.2008.09.007
Nørremark M, Swain KC, Melander B (2009) Advanced non-chemical and close to plant weed control system for organic agriculture. Paper presented at the international agricultural engineering conference, Bangkok, 7–10 Dec 2009
O’Dogherty MJ, Godwin RJ, Dedousis AP, Brighton JL, Tillett ND (2007) A mathematical model of the kinematics of a rotating disc for inter- and intra-row hoeing. Biosyst Eng 96(2):169–179
Oerke EC (2006) Crop losses to pests. J Agric Sci 144(1):31–43. doi:10.1017/s0021859605005708
Pardo G, Cirujeda A, Aibar J, Cavero J, Zaragoza C (2008) Weed harrowing in winter cereal under semi-arid conditions. Span J Agric Res 6(4):661–670
Pullen DWM, Cowell PA (2006) The effect of implement geometry on the hoe path of a steered rear-mounted inter-row weeder. Biosyst Eng 94(3):373–386. doi:10.1016/j.biosystemseng.2006.03.011
Rasmussen J, Bibby BM, Schou AP (2008) Investigating the selectivity of weed harrowing with new methods. Weed Res 48(6):523–532. doi:10.1111/j.1365-3180.2008.00661.x
Rasmussen J, Mathiasen H, Bibby BM (2010) Timing of post-emergence weed harrowing. Weed Res 50(5):436–446. doi:10.1111/j.1365-3180.2010.00799.x
Sartorato I, Zanin G, Baldoin C, De Zanche C (2006) Observations on the potential of microwaves for weed control. Weed Res 46(1):1–9. doi:10.1111/j.1365-3180.2006.00484.x
Sogaard HT, Lund I (2007) Application accuracy of a machine vision-controlled robotic micro-dosing system. Biosyst Eng 96(3):315–322
Tillett ND, Hague T, Grundy AC, Dedousis AP (2008) Mechanical within-row weed control for transplanted crops using computer vision. Biosyst Eng 99(2):171–178
Wei D, Liping C, Zhijun M, Guangwei W, Ruirui Z (2010) Review of non-chemical weed management for green agriculture. Int J Agric Biol Eng 3(4):52–60. doi:10.3965/j.issn.1934-6344.2010.04.052-060
Weide RY van der, Bleeker P, Molema GJ, Kurstjens DAG (2005a) Mechanical weed control in plant rows in 2005. (Onkruidbeheersing in Nederland, nut en noodzaak) [Dutch] (Mechanische onkruidbestrijding in de gewasrij anno 2005). Gewasbescherming 36(2):76–79
Weide RY van der, Bleeker P, Molema GJ, Lotz LAP, Fogelberg F, Melander B (2005b) Innovation in mechanical weed control in crop rows. European Weed Research Society, Doorwerth
Weide RY van der, Bleeker PO, Achten VTJM, Lotz LAP, Fogelberg F, Melander B (2008) Innovation in mechanical weed control in crop rows. Weed Res (Oxf) 48(3):215–224. doi:10.1111/j.1365-3180.2008.00629.x
Weis M, Gutjahr C, Ayala VR, Gerhards R, Ritter C, Schölderle F (2008) Precision farming for weed management: techniques. Gesunde Pflanzen 60(4):171–181. doi:10.1007/s10343-008-0195-1
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2014 Springer Science+Business Media Dordrecht
About this chapter
Cite this chapter
Hofstee, J.W., Nieuwenhuizen, A.T. (2014). Field Applications of Automated Weed Control: Northwest Europe. In: Young, S., Pierce, F. (eds) Automation: The Future of Weed Control in Cropping Systems. Springer, Dordrecht. https://doi.org/10.1007/978-94-007-7512-1_10
Download citation
DOI: https://doi.org/10.1007/978-94-007-7512-1_10
Published:
Publisher Name: Springer, Dordrecht
Print ISBN: 978-94-007-7511-4
Online ISBN: 978-94-007-7512-1
eBook Packages: Biomedical and Life SciencesBiomedical and Life Sciences (R0)