
Abstract
Reliability assessment using first- or second-order methods (FORM or SORM) demands evaluation of first derivative (i.e., slope) of the limit, which is often difficult to evaluate for real-life structures due to limited information about the performance function. To avoid this, present study aims to use stochastic response surface methodology (SRSM) to evaluate the reliability of the structure. In this method, uncertainty is modeled using series expansion of standard normal random variables (i.e., polynomial chaos expansion). The coefficients of the polynomial chaos expansion are obtained by stochastic collocation which demands limited number of evaluation of the performance function. Once the order of the polynomial and the coefficients is evaluated, reliability index is obtained by FORM. Numerical examples are presented to show the applicability of the proposed SRSM-based reliability analysis.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others
Keywords
1 Introduction
First-order reliability methods have been extensively used for reliability analysis of structural systems [11, 14] due to its simplicity. For this purpose, Rackwitz–Fiessler algorithm is often used to find out the optimal distance (i.e., reliability index) of the limit surface from the origin in standard normal space. This method needs to evaluate the slopes (i.e., first derivative of the limit surface) to locate the most probable design point and subsequently the reliability index. However, limit surfaces are often unknown in the close form (i.e., implicit), and hence, their derivatives are difficult to evaluate. In this context, Bucher and Bourgand [2] developed response surface method (RSM) for reliability analysis. In RSM, the unknown limit surface is approximated by a multidimensional quadratic polynomial near the failure region. In the recent past, engineers and researchers have extensively used this method for various applications like performance evaluation, crash simulation, and reliability-based design optimization [1, 3, 6, 9, 10]. However, as this polynomial approximation of the original limit state is valid near the failure region, it often faces difficulty to find out the optimal distance for limit states with multiple design points. Moreover, as this is a deterministic representation, it fails to capture the stochastic characteristics of the original limit state.
To avoid this problem, stochastic response surface method (SRSM) was proposed by Isukapalli [7]. In this method, the stochastic signature of the original limit state is mapped in the standard normal space using polynomial chaos expansion (PCE). Wiener [16] first introduced PCE to model the turbulence where infinite orthonormal functions in standard normal space are used to model the stochastic phenomenon. Ghanem and Spanos [5] showed that Hermite polynomials form an orthogonal basis for PCE and is convergent in the mean-square sense. However, this representation needs to evaluate the coefficients of the Hermite polynomials to model the original performance function. Tatang [15] developed probabilistic collocation technique where Gauss quadrature points were used to evaluate the coefficients of the PCE. Isukapalli [7] used the roots of one order higher than polynomial as the reference points and evaluated the coefficients by regression analysis. Gavin [4] showed that SRSM works better for complex structures with low failure probability where Monte Carlo simulation (MCS) and approximate methods are either computationally intensive or inaccurate. It models the global stochastic nature of the limit surface as opposed to model the local nature near the failure region in RSM. This property may be used to identify the local minima where multiple design points exist. Due to these advantages, SRSM has gained momentum for reliability analysis of civil engineering structures in the recent past. Li et al. [9] performed reliability analysis of rock slopes using SRSM with higher order polynomials. Mollon [12] used collocation-based SRSM to analyze the stability of a circular tunnel driven by a pressurized shield.
With these in view, present study aims also apply SRSM to analyze the reliability of a retaining wall against overturning. The results obtained from this method will be compared with Monte Carlo simulations to check the efficiency and accuracy of the SRSM.
2 Stochastic Response Surface Methodology
The limit surface divides the probability space into safe and failure zones, which is symbolically represented as
where X = [x 1, x 2,…x n ] and xi are the random variables that describe the failure plane. In the above equation, g(x) < 0 represents the failure region. The probability of failure for a limit state described in Eq. (1) can be represented as
However, probability evaluation using above equation demands the complete description of the joint probability distribution function f which are often unknown. The problem is more complex where the performance function described in Eq. (1) is not available in explicit form. To evaluate the reliability for these cases, either RSM or SRSM is used. However, RSM often faces difficulties for nonsmooth failure planes with multiple local minima as the polynomial approximation near the MPP is carried out for this case. Under these situations, SRSM can be a better alternative as the stochastic nature of the failure plane, irrespective of the presence of local minima, is modeled using PCE. Reliability evaluation using SRSM involves the following four major steps:
-
(a)
Functional/polynomial chaos representation of output
-
(b)
Evaluation of unknown coefficients
-
(c)
Representation of input random variables in terms of standard normal variables
-
(d)
Evaluation of reliability using FORM/SORM
2.1 Functional/Polynomial Chaos Representation of Output
Polynomial chaos is defined by an orthonormal set of standard normal variables \( \left\{ {{{\text{Z}}_{\rm{i}}}} \right\}_{i = 1}^\infty \). Therefore, PC of order p (i.e., \( {\Gamma_p} \)) is defined by the set of polynomials of order p which is orthogonal to all of polynomials of order p − 1. Using these orthonormal set of standard normal variables, any function f can be represented as
In the above equation, p and r represent the order and the dimension, respectively, and \( a_{{\rho_1}, \ldots, {\rho_r}}^{{n_1}, \ldots, {n_r}} \) represent the coefficients. In this context, Hermite polynomials are used to represent f which is given by Ghanem and Spanos [5] and Issukapalli[7]:
where Z is the standard normal random variable. Using the expressions for PCE given in Eqs. (3) and (4), the limit state given in Eq. (1) can be represented in standard normal space as
The above expression of performance function is the linear combination of n-dimensional polynomials involving unknown coefficients \( a_{{\rho_1}, \ldots, {\rho_r}}^{{n_1}, \ldots, {n_r}} \) which are evaluated using collocation points.
2.2 Evaluation of Unknown Coefficients
Once the functional representation of the output is known, the next step is to evaluate the unknown coefficients. For this purpose, regression analysis is performed using collocation points which are the roots of one dimensional Hermite polynomial that are one order higher than the order of the polynomials used to represent the limit surface. Therefore, the number of collocation points available for n dimensional pth order PCE is (p + 1)n [8]. In this format, it can be shown that the numbers of collocation points are more than the number of unknowns. Using the values of the limit state function at these points, the unknown coefficients are evaluated by stochastic regression analysis.
2.3 Representation of Stochastic Inputs
The regression analysis mentioned in the previous section demands the evaluation of the performance function represented by Eq. (1) at (p + 1)n collocation points. However, as the collocation points are in standard normal space, the equivalent points in the original space are found by one-to-one mapping of cumulative distribution function (CDF) of the two random variables. For the details of this transformation, one may refer to Isukapalli [8].
2.4 Evaluation of Reliability
Once the coefficients are evaluated using stochastic least square technique described in previous section, the performance function in Eq. (1) is transformed into standard normal space which may be further used for first-order reliability analysis. For this purpose, the optimal distance from the origin in the standard normal space (i.e., reliability index β) can be evaluated using Rackwitz–Fiessler algorithm [13]. In this iterative procedure, β is obtained as
In the above equation, Z * represents MPP in standard normal space and \( \left\| . \right\| \) represents the Euclidean norm. It can be shown that the probability of failure is related to β through the following relation:
3 Example Problems
The SRSM method described in the previous section is used to evaluate the reliability of two different limit states.
Example 1: Nonlinear and Nonsmooth Limit State
In the first problem, the following performance function is considered:
where X 1and X 2 are the two random variables.
Example 2: Retaining Wall Against Overturning
In the second problem, the reliability of a retaining wall as shown in Fig. 1 against overturning is considered.

Retaining wall
The parameters in Fig. 1 and the details of the stabilizing and overturning moments are given in Appendix A. The limit state describes the failure in this case is given by
In the above equation, M r represents the stabilizing moment and M o represents the overturning moment. The random variables associated with the limit states are surcharge load (q), unit weight of concrete (W c ), unit weight of soil Ws, soil friction angle (ϕ), and wall friction angle (δ).
4 Numerical Results and Discussion
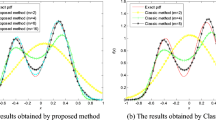
SRSM discussed in the previous sections is used to solve example cases and evaluate the reliability. In Example 1, X 1 and X 2 are the two uncorrelated random variables with the values of mean and standard deviation are 3.5 and 1, respectively. In this case, different combinations of normal and lognormal variables are considered and the results are compared with Monte Carlo simulations. The unknown coefficients of the PCE are evaluated using collocation points. For this purpose, 4th-order polynomials are used. The total number of unknowns in Eq. (5) is 15. To generate the collocation points, roots of the 5th order (i.e., 4 + 1) are used. As the dimension of the problem is 2, the possible combinations using these roots are 25 (i.e., 32.) Although 32 collocation points are available for the regression analysis, only 23 (i.e., 1.5 × 15) points are used. It has been observed that the convergence can be achieved with 1.5n collocation points. In this context, the points that are close to the origin were given the priority. Figure 2 shows the CDF of the limit state using PCE and Monte Carlo simulations. It can be observed from this figure that the 4th-order polynomial estimates CDF satisfactorily. Using this 4th-order PCE, Hasofer–Lind reliability index is evaluated as described in Eq. (6). Table 1 shows the reliability index and probability of failure for different combinations of random variables X 1 and X 2. From this table, it can be concluded that SRSM results match closely with simulations. In this context, six million samples were used for simulations.

CDF of the limit state in Example 1
The SRSM-based technique is further used to evaluate the reliability of the retaining wall. Table 2 shows the distributions and the parameters of the random variables used in this model. It can be observed that the dimension of this problem is 5. In this case also, a 4th-order PCE is used to model the limit state in the standard normal space. Total number of unknowns for this 5th dimensional and 4th-order PCE representation is 126. To evaluate these unknown coefficients, roots of the 5th-order polynomial are again used as the collocation points. As described in previous section, total numbers of collocation points available in this case are 3,125 (i.e., 54+1). However, 183 collocation points (i.e., 1.5 × 126) which are closer to the origin are used for regression analysis. Using these collocation points, CDF of the limit state is obtained and is shown in Fig. 3. In this case also, one can notice a close match between the PCE and simulations. Figures 4 and 5 show the reliability index for different values of height and base width of the retaining wall. From these figures, one can conclude that the reliability index obtained by SRSM closely matches with the simulations. Figure 6 shows the probability of failure for different values of height and base width. From this figure, one can easily evaluate the reliability (1 − p f ) for a given combination of height and base width.

CDF of the limit state in Example 2

Change of β with height of the wall

Change of β with base width

Variation of P f for different height and base width
5 Conclusions
In this chapter, stochastic response surface method is used to evaluate the reliability for different limit state functions. In this method, the random nature of the limit state is modeled by multidimensional polynomial chaos expansion whose coefficients are evaluated by regression analysis. For this purpose, the roots of the polynomial of dimension one order higher than the original one are used to generate the collocation points. Once the coefficients are evaluated, the optimal distance in standard normal space (i.e., reliability index) is evaluated using Rackwitz–Fiessler algorithm. The example cases shown in this chapter prove the accuracy and efficiency of the SRSM-based reliability analysis.
References
Babu G, Sivakumar L, Amit S (2010) Reliability analysis of earth dams. J Geo-Tech Geo Environ Eng 136(7):995–998
Bucher CG, Bourgund U (1990) A fast and efficient response surface approach for structural reliability problems. Struct Saf 7:57–66
Deb K, Gupta S, Daum D, Branke J, Mall AK, Padmanabhan D (2009) Reliability- based optimization using evolutionary algorithms. IEEE Trans Evol Comput 13(5):1054–1074
Gavin Henri P, Chung YS (2008) High-order limit state functions in the response surface method for structural reliability analysis. Struct Saf 30:162–179
Ghanem R, Spanos P (1991) Stochastic finite elements: a spectral approach. Springer, New York
Gupta S, Manohar CS (2004) Improved response surface method for structural reliability analysis. Struct Saf 26:123–139
Isukapalli SS (1999) Uncertainty analysis of transport –transformation models. PhD thesis, State University of New Jersey, New Brunswick
Isukapalli SS, Roy A, Georgopoulos PG (1998) Stochastic response surface methods (SRSMs) for uncertainty propagation: application to environmental and biological systems. Risk Anal 18(3):351–363
Li Dianqing, Chen Yifeng, Lu Wenbo, Zhou Chuangbing (2011) Stochastic response surface method for reliability analysis of rock slopes involving correlated non-normal variables. Comput Geotech 38:58–68
Li Minghao, Frank Lam, Foschi RO (2009) Seismic reliability analysis of diagonal-braced and structural-panel-sheathed wood shear walls. J Struct Eng 135(5):587–596
Lu Renjian, Luo Yuanhui, Conte Joel P (1994) Reliability evaluation of reinforced concrete beams. Struct Saf 14:277–298
Mollon G, Daniel D, Abdul-Hamid S (2011) Probabilistic analysis of pressurized tunnels against face stability using collocation-based stochastic response surface method. J Geotech Geo Environ Eng 137(4):385–397
Melcher RE (1999) Structural reliability and prediction. Wiley, Chichester
Rodriguez RJ, Sitar N, Chacon J (2006) System reliability approach to rock slope stability. Int J Rock Mech Min Sci 43:847–859
Tatang MA (1995) Direct incorporation of uncertainty in chemical and environmental engineering systems. PhD thesis, Massachusetts Institute of Technology
Wiener N (1938) The homogeneous chaos. Am J Math 60:897–936
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Appendix A
Appendix A
Figure 1 shows the retaining wall used in Example 2. In this figure, H, B, B s , t s , and t b are the height of wall, length of base, distance of centerline of stem to heel, thickness of stem, and thickness of base slab, respectively. The thickness of the stem and the base is taken to be 0.45 m. Further, q and δ represent the surcharge and the wall friction angle, while p a represents the active earth pressure which has horizontal and vertical components as p ah and p av, respectively. M 1, M 2, M 3, and M 4 are the moments due to self weights of different components of the wall–soil combination marked 1, 2, 3, and 4, respectively, which are given by
The total downward force due to the weights of different components (i.e., soil mass, stem of the wall, base of the wall, and surcharge) is given by
The point of action of the total weight W can be obtained as
Using Eqs. (A2) and (A3), the total resisting moment about the toe of the wall can be expressed as
Thus, the active earth pressure acting on the wall due to the soil mass is given by
where the active earth pressure coefficient k a is defined as
In the above equation, ϕ, α, and γ are the soil friction angle, the angle of the wall, and the inclination of the backfill, respectively. Using Eqs. (A5) and (A6), one can estimate the total overturning moment acting on the wall as
Rights and permissions
Copyright information
© 2013 Springer India
About this paper
Cite this paper
Kameshwar, S., Chakraborty, A. (2013). On Reliability Evaluation of Structures Using Hermite Polynomial Chaos. In: Chakraborty, S., Bhattacharya, G. (eds) Proceedings of the International Symposium on Engineering under Uncertainty: Safety Assessment and Management (ISEUSAM - 2012). Springer, India. https://doi.org/10.1007/978-81-322-0757-3_79
Download citation
DOI: https://doi.org/10.1007/978-81-322-0757-3_79
Published:
Publisher Name: Springer, India
Print ISBN: 978-81-322-0756-6
Online ISBN: 978-81-322-0757-3
eBook Packages: EngineeringEngineering (R0)