
Abstract
In this paper, a novel proportional-integral (PI) rotor position tracking controller-based linear matrix inequality (LMI) technique is designed for the permanent magnet synchronous motor (PMSM) system. Different from the results on structure control for PMSM, the PI-type gain parameters can be obtained by solving a series of LMIs instead of by manual debugging repeatedly. As a result, more control requirements for PMSM system including stability, position tracking, and robustness can be guaranteed based on systemic analysis method. Moreover, when considering the motor model without position sensor, a reduced-order Luenberger observer is constructed to estimate the rotor position.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others
Keywords
41.1 Introduction
In recent years, the permanent magnet synchronous motor (PMSM) has received increasing interest in the field of industrial application [1]. Compared with other drive devices, the PMSM model can obtain higher power density, larger torque to inertia, and higher efficiency which makes the PMSM a prior choice in certain applications [2, 3]. It is noted that both the rotor position and the angular speed in PMSM system are the two main controlled objectives and have obtained widespread concerns (see [4–9]). However, the existence of nonlinearities, unknown disturbances, and load torque will influence the control performance of PMSM system [1, 2]. In order to solve these difficulties, some advanced control algorithms have been presented for the PMSM system, such as predictive control [2], adaptive control [3], backstepping method [8], sliding mode control [9], and so on.
It is well known that PI/PID control is widely applied in practical systems and some theoretical algorithms have also been discussed based on both the frequency-domain and time-domain approaches [10]. With the popularity of linear matrix inequality (LMI) techniques, the PI/PID controller-based LMI optimization algorithm has been designed to achieve satisfactory control performance in the scope of time domain [11]. For the control problem of PMSM system, the control gains in some traditional PI/PID algorithms can be obtained only by debugging repeatedly or depending on experience, which seriously affects the system performance of PMSM [3, 5]. Moreover, not enough sensors applied in PMSM system [7] will bring more difficulties in controlling the rotor position or the angular speed in PMSM system.
In this paper, a PI-type position controller based on LMIs is proposed for PMSM system. Instead of manual debugging repeatedly, the control gains can be computed by solving a series of convex LMIs and rigorous proof is given such that the closed-loop PMSM system can be guaranteed to be stable and the tracking error of rotor position can also converge to zero. At the same time, in order to deal with the in-measurable position problem when lacking position sensors, a linear Luenberger observer based on PMSM system is constructed to estimate the position variable. Furthermore, the peak-to-peak index is used to formulate the disturbance attenuation performance of PMSM system.
41.2 Mathematical Model of Surface-Mounted PMSM
After making some standard assumptions, the dynamical model of a surface-mounted PMSM can be written as follows: [1–3]
where \( i_{d} \) and \( i_{q} \) are the \( d - q \) axis currents, \( u_{d} \) and \( u_{q} \) are the \( d - q \) axis voltages, \( \omega \) is the angular velocity, \( \theta \) is the rotor angle position, \( R \) is the stator resistance, \( L \) is the stator inductor, \( p \) is the pole pair, \( B \) is the viscous friction coefficient, \( J \) is the rotor moment of inertia, \( \phi_{f} \) is the rotor flux linkage, \( T_{L} \) is the load torque, \( K_{t} = 1.5\,p\phi_{f} \) is the torque constant.
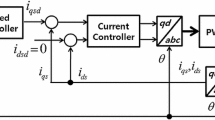
In order to eliminate the influence of the coupling terms between angular velocity and currents, the \( d \)-axis reference current is usually assumed as \( i_{d}^{ * } = 0 \). If the current controllers work well, the output term \( i_{d} = i_{d}^{ * } = 0 \). As a result, the PMSM system (41.1) can be simplified in the following form:
which makes the position controller design simpler.
With the desired angular position \( \theta^{ * } \), \( \zeta (t) \) is a designed auxiliary variable based on tracking error with the expression \( \dot{\zeta }(t) = \theta^{ * } - \theta (t) \). To achieve good control objective, the augmented state variable is defined as \( x(t) = \left[ {\begin{array}{*{20}c} {\theta (t),} & {i_{q} (t),} & {\zeta (t),} & {\omega (t)} \\ \end{array} } \right]^{T} \). Assuming \( u(t) = u_{q} (t) \) as the control input and \( d(t) = \left[ {\begin{array}{*{20}c} {\theta^{ * } ,} & {T_{L} } \\ \end{array} } \right]^{T} \) as the disturbance term, the state equation can be given in the following augmented form:
where \( z(t) \) is the reference output with known matrices \( C \) and \( D \), and
41.3 PI-Type Controller Design
For the position tracking problem, a novel PI-type position controller is proposed as follows:
where \( K_{P1} ,K_{P2} ,K_{P3} \) and \( K_{I} \) are controller gains to be determined later.
Substituting \( u(t) = Kx(t) \) into augmented system (41.3), the corresponding closed-loop PMSM system can be described as
where \( K = \left[ {\begin{array}{*{20}c} {K_{P1} } & {K_{P2} } & {K_{I} } & {K_{P3} } \\ \end{array} } \right] \).
41.4 Stability Analysis with Disturbance Attenuation Performance
The following result provides a criterion for the performance analysis of the unforced PMSM system of (41.3).
Theorem 41.1
For the known parameters \( \lambda ,\mu_{i} (i = 1,2),\alpha > 0, \) suppose there exist matrices with appropriate dimensions \( P,T > 0, \) and parameter \( \gamma > 0 \) such that the following LMIs
are solvable, then the unforced system of (41.3) is stable, and the output satisfies the disturbance attenuation performance \( \sup_{{\left\| {d(t)} \right\|_{\infty } \le 1}} \left\| {z(t)} \right\|_{\infty } < \gamma^{2} \).
Proof
Defining a typical Lyapunov function as
Obviously it is noted that \( V(x(t),t) \ge 0 \). Furthermore, we can get
where \( \Phi _{1} = {\text{sym}}(A^{T} P) + \mu_{2}^{ - 2} PB_{1} B_{1}^{T} P \).
Based on Schur complement formula, (41.6) implies that \( \Phi _{1} + \mu_{1}^{2} T < 0 \) holds. With (41.10), it can be seen that for any \( \left\| {d(t)} \right\|_{\infty } \le 1 \), we can get
So for any \( x(t) \), it can be seen that
which also implies that the unforced PMSM system of (41.3) is stable.
The proof of disturbance attenuation performance is omitted here to save space.
41.5 Position Tracking with Peak-to-Peak Performance
The following theorem provides an effective solution for the PI-type position tracking problem of closed-loop PMSM system (41.5).
Theorem 41.2
For the known parameters \( \mu_{i} (i = 1,2),\alpha > 0, \) suppose there exist matrices with appropriate dimensions \( Q = P^{ - 1} > 0,M = T^{ - 1} ,R > 0, \) and parameter \( \gamma > 0 \) such that the following LMIs
are solvable, then the closed-loop PMSM system (41.5) under the PI-type control law (41.4) is stable and satisfies both \( \lim_{t \to \infty } \theta (t) = \theta^{ * } \) and \( \sup_{{\left\| {d(t)} \right\|_{\infty } \le 1}} \left\| {z(t)} \right\|_{\infty } < \gamma^{2} \). In this case, the control gains \( K_{P1} ,K_{P2} ,K_{P3} \) and \( K_{I} \) can be solved via \( R = KQ \).
The proof of Theorem 41.2 is omitted here to save space.
41.6 Reduced Luenberger Observer Design
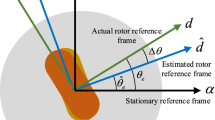
In this section, we focus on the motor model without position sensor. As a result, the position status of the rotor cannot be measured directly. So a typical reduced-order Luenberger observer needs to be constructed to observe the state variables of PMSM system and further to estimate the position values.
Based on the PMSM system (41.2), the reduced Luenberger observer is designed as follows:
where \( \hat{i}_{q} \) and \( \hat{\omega } \) represent the estimate values of \( i_{q} \) and \( \omega \), respectively.
Combining (41.2) with (41.14), we can get
where \( e_{q} = i_{q} - \hat{i}_{q} ,e_{\omega } = \omega - \hat{\omega } \) represent the observation errors of \( i_{q} \) and \( \omega \). From (41.15), the observer gain \( \varepsilon \) can be designed to make the continuous error dynamics converge to zero asymptotically. It is shown that the proposed observer is of first order, so the computation burden is relatively light. Hence, the position of the rotor can be calculated by \( \theta = \int {\hat{\omega }dt} \).
41.7 Simulation Results
The specification of the PMSM system is shown in Table 41.1.
From \( t = 0 \) to 20 s, the position command is designed as \( \pi \;{\text{rad}} \), and after t = 20 s, the position command is changed as \( 4\;{\text{rad}} \). Defining parameters \( \varepsilon = 5,T_{L} = 5\,{\rm N\,m} \). By using the LMI box, the PI-type controller can be computed as \( K_{P1} = - 1.5968,K_{P2} = 0.5192,K_{P3} = 0.1498,K_{I} = 1.1481 \).
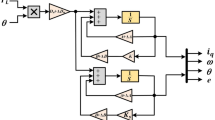
The above four figures show the dynamical responses of PMSM in combination with the PI-type controller and the Luenberger observer. From Fig. 41.1, the rotor position and the d-axis current are correct and rapidly converge to their reference values, respectively. The satisfactory position tracking and speed control are embodied in Fig. 41.2.

Position responses of with Luenberger observer and responses of the q-axis current

Error between desired position and actual position and responses of angular speed
41.8 Conclusion
This paper considers the tracking problem for the rotor position of PMSM system by combining a generalized PI-type controller with a reduced-order Luenberger observer. Based on convex optimization LMI techniques, some typical control objectives including stabilization, position tracking, and robustness for PMSM system can be guaranteed simultaneously.
References
Krishnan R (2001) Electric motor drives: modelling, analysis and control. Prentice-Hall, Upper Saddle River
Liu H, Li S (2012) Speed control for PMSM servo system using predictive function control and extend state observer. IEEE Trans Ind Electron 59:1171–1183
Li S, Gu H (2012) Fuzzy adaptive internal model control schemes for PMSM speed-regulation system. IEEE Trans Ind Inf 8:767–779
Kim WH, Shin D, Chung CC (2012) The Lyapunov-based controller with a passive nonlinear observer to improve position tracking performance of microstepping in PMSM. Automatica 48:3064–3074
Jung JW, Choi YS, Leu VQ, Choi HH (2011) Fuzzy PI-type current controllers for permanent magnet synchronous motors. IET Electr Power Appl 5:143–152
Xu JX, Panda SK, Pan YJ, Lee TH, Lam BH (2004) A modular control scheme for PMSM speed control with pulsating torque minimization. IEEE Trans Ind Inf 51:526–536
Jang LH, Ha LI, Ohto M, Sul SK (2004) Analysis of permanent magnet machine for sensorless control based on high-frequency signal injection. IEEE Trans Ind Appl 40:1595–1604
Zhou J, Wang Y (2003) Adaptive backstepping speed controller design for PMSM. IEEE Proc Electr Appl 2:165–172
Zhang XG, Sun LZ, Zhao K, Sun L (2013) Nonlinear speed control for PMSM system using sliding-mode control and disturbance compensation techniques. IEEE Trans Power Electron 28:1358–1365
Astrom KJ, Hagglund IT (1994) PID controllers: theory, design and tuning, 2nd edn. Instrument Society of America, Research Triangle Park
Yi Y, Guo L, Wang H (2009) Constrained PI tracking control for output probability distributions based on two-step neural networks. IEEE Trans Circuits Syst I 56:1416–1426
Acknowledgments
This paper is supported by the National Natural Science Foundation of China under Grants (61473249, 61174046 and 61203195).
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2015 Springer-Verlag Berlin Heidelberg
About this paper
Cite this paper
Sun, X., Yi, Y., Cao, S., Liu, H., Zhang, T. (2015). Robust PI-Type Position Controller Design for Permanent Magnet Synchronous Motor Using LMI Techniques. In: Deng, Z., Li, H. (eds) Proceedings of the 2015 Chinese Intelligent Automation Conference. Lecture Notes in Electrical Engineering, vol 337. Springer, Berlin, Heidelberg. https://doi.org/10.1007/978-3-662-46463-2_41
Download citation
DOI: https://doi.org/10.1007/978-3-662-46463-2_41
Published:
Publisher Name: Springer, Berlin, Heidelberg
Print ISBN: 978-3-662-46462-5
Online ISBN: 978-3-662-46463-2
eBook Packages: EngineeringEngineering (R0)