
Abstract
We review some dynamical effects induced by constant effort harvesting in single-species discrete-time population models. We choose three different forms for the density-dependent recruitment function, which include the overcompensatory Ricker map for semelparous species; a modified Ricker model allowing for adult survivorship; and a model with both strong Allee effect and overcompensation which results from incorporating mate limitation in the Ricker model. We show that these simple models exhibit some interesting (and sometimes unexpected) phenomena such as the hydra effect; bubbling; sudden collapses; and essential extinction. We underline the importance of two often underestimated issues that turn out to be crucial for management: census timing and intervention time.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
These keywords were added by machine and not by the authors. This process is experimental and the keywords may be updated as the learning algorithm improves.
1 Introduction
We consider discrete-time single-species models governed by a first-order difference equation
where \(x_n\) denotes the population size at the \(n\)–th generation, and \(F\) is the so-called stock–recruitment (production) function. These models are well-suited for semelparous populations [7, Chap. 4], but they also fit well to populations where a fraction of adults survive the reproduction season [3, Sect. 7.5]. We will focus our attention on the unimodal Ricker map [12]
and two modifications of it. The first one assumes a survivorship rate \(\alpha \), \(\alpha \in (0,1)\), of adults and reads
We refer to this function as the Ricker–Clark map; see, e.g., [3, 9, 19].
The second modification of the Ricker model that we will consider exhibits a strong Allee effect, that is, there is a critical population size (Allee threshold) below which the population cannot survive [4]. It has been used by Schreiber [14] to model mate limitation, and we will refer to it as the Ricker–Schreiber map. Its production function is
Our aim is to show how a strategy of constant effort harvesting changes the dynamics of the difference Eq. (1) when the production map \(F\) is given by (2), (3) or (4).
2 The Ricker Model and the Hydra Effect
In this section we consider the Ricker function (2), which is a prototype for overcompensatory production. See Fig. 1 for a graphic representation when \(r=3\).

Graphic representation of the Ricker stock–recruitment curve \(F(x)=x \mathrm {e}^{3 (1-x)}\). This curve is overcompensatory; this means that after a critical value of the population size, recruitment decreases with increasing population size. The intersection with the line \(y=x\) (dashed line) is the positive equilibrium \(x=1\) (obtained from the carrying capacity after normalization)

Bifurcation diagram for Eq. (5) with \(r=3\) and \(\gamma \in (0,1)\). For each value of \(\gamma \) (with step \(0.001\)), we produce 300 iterations of (5) with a random initial condition \(x_0\in [0,2.5]\), and plot the last 20 iterates to let the transients die out. The bold line corresponds to the average population size
A strategy of constant effort harvesting assumes that a percentage \(\gamma x\) of the population is removed at every period. Thus, harvesting a population following the Ricker map after recruitment gives
where \(\gamma \in (0,1)\). The bifurcation diagram of (5) for varying \(\gamma \) (Fig. 2) shows the well-known effects of increasing harvesting:
-
Reducing complexity: if the unharvested population is unstable, a sufficiently large harvesting effort leads the system to a globally stable positive equilibrium through a series of period-halving bifurcations (see, e.g., [8]).
-
Overharvesting leads to extinction after a transcritical bifurcation at \(\gamma =1-\mathrm {e}^{-r}\).
2.1 Census Timing and the Hydra Effect
The hydra effect is a term recently coined by P. A. Abrams and co-authors to define a seemingly paradoxical increase in the size of a population in response to an increase in its per-capita mortality [1]. One of the simplest models where this effect can be observed is a modified version of Eq. (5), namely,
This equation has been studied in [8, 11, 15]; see also [1] for other recruitment functions. In particular, Ref. [11] proves that the average population size for any initial condition \(x_0>0\) is an increasing function of the harvesting effort \(\gamma \) for all \(\gamma \in \left( 0,1-\mathrm {e}^{1-r}\right) \). The average population size is defined by the formula
The bifurcation diagram for \(r=3\) is shown in Fig. 3. The bold line corresponds to the average population size.

Bifurcation diagram for Eq. (6) with \(r=3\) and \(\gamma \in (0,1)\). The bold line corresponds to the average population size
What is the relationship between models (5) and (6)? From an ecological point of view, both are models with only two processes: reproduction and harvesting. The only difference between them is the moment at which the population size is measured. Indeed, if we denote by \(F(x)=x \mathrm {e}^{r (1-x)}\) the recruitment function and by \(h(x)=(1-\gamma ) x\) the harvesting action, Eq. (5) corresponds to census after harvesting. That is, it can be written in the form
On the other hand, Eq. (6) corresponds to census after reproduction. That is, it can be written in the form
Following another analogy [3, see Sect. 7.1], Eq. (7) measures the dynamics of the parent stock, whereas (8) measures the dynamics of the recruits.
From a mathematical point of view, Eqs. (7) and (8) are dynamically equivalent [11]; this means that they share the same properties of stability, periodicity and chaos. However, what we observe in Figs. 2 and 3 does not appear to be the same. In particular, while (7) does not exhibit the hydra effect, (8) does do. This fact stresses the necessity of taking into account census timing when a mathematical model is used for management purposes; using Clark’s terms [3, see Sect. 7.1], the same harvesting model can exhibit a hydra effect when we census recruits, but it does not if we census the parent stock. Of course, the hydra effect is still present in the recruits but “hidden” since we do not measure it. For more discussion on this topic, see [5] and references therein.
We notice that the hydra effect in discrete single-species models can only occur if the density dependence is overcompensatory [1, 15]. Actually, it is easy to explain using the geometric interpretation of the positive equilibrium. Recall that for the Ricker model, the average population size matches the equilibrium even when the population oscillates. It is easy to check that the equilibrium \(K_{\gamma }\) of (5) is the projection on the \(x\)–axis of the intersection of the curve \(y=F(x)\) with the line \(y=x/(1-\gamma )\), and the positive equilibrium of (6) is \(\overline{K_{\gamma }}=F(K_{\gamma })\), which is the projection of the same intersection point on the \(y\)–axis. This simple observation explains why increasing harvesting produces a hydra effect in model (6) but not in (5). See Fig. 4.

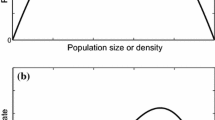
Geometric representation of the positive equilibria of models (5) and (6). The equilibrium \(K_{\gamma }\) of the former decreases as \(\gamma \) is increased, while the equilibrium \(\overline{K_{\gamma }}\) of the latter increases with \(\gamma \) until the critical value \(\gamma _c\), for which the line \(y=x/(1-\gamma )\) intersects the curve \(y=F(x)\) at its maximum value \((c,F(c))\)
2.2 Variable Harvest Timing and Its Impact on Population Dynamics
As emphasized in [6], the timing of harvesting may profoundly influence the impact on the population. The main reason is that if population growth is compensatory, then if individuals are removed at early stages in the season, the remaining individuals reproduce better. Seno [15] proposed one of the simplest models that considers harvesting at a specific point of time within the season. It assumes that individuals accumulate energy for reproduction in the course of the season and takes into account density-dependent effects in the population dynamics for the parts of the season before and after harvesting. For the Ricker map, the model is
where \(\theta \in [0,1]\) is the moment of time in the season (assuming its length is 1) when harvest intervention takes place. The main conclusion of Seno’s paper is that the hydra effect in (9) occurs for low values of \(\theta \), that is to say, the earlier we harvest, the more the average population size is increased.
It is easily seen that the right-hand side of (9) is a convex combination of the right-hand sides of Eqs. (5) and (6); cf. [2]. In other words, it can be written as
where \(h\) and \(F\) have the same meaning as in (7). Using this fact, it is easy to prove that the intervention time \(\theta \) does not change the critical value of the harvesting effort \(\gamma \) driving the population to extinction, and that the average population size is a decreasing function of \(\theta \).
Since we have seen that the cases \(\theta =0\) and \(\theta =1\) are dynamically equivalent, an interesting problem is how intervention time affects the qualitative behaviour of the model with harvesting. This problem has been addressed in [2], and a major conclusion is that harvesting at intermediate values of the reproductive season may reduce complexity. To illustrate this fact, Fig. 5 shows the time series of a solution of Eq. (9) with \(\theta =1\) (which reduces to (5)) and \(\theta =0.7\). While the former is chaotic, the latter has a globally attracting positive equilibrium.

Time series for Eq. (9) with \(\gamma =0.7\), \(r=4\) and different harvesting times: a chaotic solution for \(\theta =1\) (harvesting at the end of the reproductive season); b asymptotically stable positive equilibrium for \(\theta =0.7\)
3 The Ricker–Clark Model and the Bubbling Effect
As we have seen in the previous section, one of the characteristics of the Ricker model with harvesting (5) is that an increasing harvesting effort stabilizes the positive equilibrium. Actually, the opposite effect is not posible: harvesting cannot destabilize a stable positive equilibrium [11]. However, it has recently become apparent that harvesting/fishing can magnify fluctuations in exploited populations, and some hypotheses have been proposed (see, e.g., [16] and references therein).
One of the simplest mechanisms giving rise to destabilization with increasing harvesting effort in deterministic models of discrete-time single-species populations is to allow a certain percentage of the adult population to survive the season. This yields the Ricker–Clark production function (3). Contrary to the usual Ricker map, function (3) is usually bimodal, and this fact leads to richer dynamics. See Fig. 6 for a graphic representation when \(r=4\) and \(\alpha =0.55\).

Graphic representation of the Ricker–Clark stock–recruitment curve \(F(x)=0.55 x+0.45 x \mathrm {e}^{3 (1-x)}\). In this case there are two critical points (a local maximum and a local minimum). The only positive equilibrium is the carrying capacity (normalized to \(1\)), as in the Ricker map
The influence of harvesting in a population governed by Eq. (1) with the Ricker–Clark function (3) has been recently studied in [9] for constant quota harvesting and in [11] for constant effort harvesting. In both cases, it was shown that for certain parameter ranges (of the adult survivorship \(\alpha \) and production rate \(r\)) increasing harvesting can destabilize the positive equilibrium and, more generally, harvesting can magnify fluctuations of population abundance, even inducing chaotic oscillations [11, Sect. 3.2].
Consider the Ricker–Clark map with constant effort harvesting
The destabilization that occurs for increased harvesting can be explained by a bubbling effect, which essentially consists of a period-doubling bifurcation followed by a period-halving bifurcation; these bifurcations produce a bubble in the bifurcation diagram. See Fig. 7.

Bifurcation diagram showing a bubbling effect for Eq. (10) with \(\alpha =0.55\), \(r=4\) and \(\gamma \in (0,1)\). Inside the bubble, the equilibrium is unstable (dashed curve), and there is an attracting periodic orbit of period two
In Fig. 8 we visualize the bubbling effect as well as population extinction due to overharvesting by presenting time series predicted by the model for selected harvesting efforts.

Time series for Eq. (10) with \(\alpha =0.55\), \(r=4\) and different harvesting rates: a asymptotically stable equilibrium for the unharvested population (\(\gamma =0\)); b sustained oscillations for a capture rate of \(30\,\%\); c the equilibrium is again stable when the harvesting rate is \(70\,\%\); d overharvesting (\(\gamma =0.96\)) drives the population extinct
In Ref. [11, Theorem 2], the exact parameter ranges are given for which a bubble occurs in Eq. (10). What is necessary is a combination of high production rates (\(r>3\)) and intermediate survivorship rates. Similar conclusions are obtained for a stage-structured model with two age classes (juveniles and adults) if only adult harvesting is allowed [10, 20]. Bubbling can also occur if juveniles and adults are harvested with the same rate, but not if juveniles are the only harvesting target (for more details, see [10]). Note that forms of bubbling have also been observed in population models with constant feedback control (here, constant immigration), but only when varying the production rate rather than the harvesting parameter [18].
If we consider intervention time using Seno’s model as we did in Sect. 2, we arrive at a similar conclusion: intermediate harvesting times can be stabilizing; actually, a suitable value of the timing parameter \(\theta \) can avoid the bubbling effect (see [2] for more details).
4 The Ricker–Schreiber Model: Sudden Collapses and Essential Extinction
A common feature of the models studied in the previous sections is that overharvesting (leading to population extinction) takes place after a transcritical bifurcation, i.e. when the harvesting effort has passed a critical value \(\gamma ^*\). Actually, for values of \(\gamma \) slightly smaller than \(\gamma ^*\), the positive equilibrium is globally asymptotically stable and decays continuously to zero. In some sense, this means that extinction can be prevented if harvesting pressure is increased only gradually (although the decay to zero can be very fast, especially if we census after reproduction, see Fig. 3).
But there are populations for which the transition from a stable positive equilibrium to extinction is discontinuous, producing a so-called sudden collapse. This phenomenon is typical of a strategy of constant quota harvesting [9, 13], but it can also happen for constant effort harvesting if the population model exhibits a strong Allee effect.
The last model we consider in this paper is also based on the Ricker map, but it includes a factor for positive density dependence that induces a strong Allee effect. It is the Ricker–Schreiber model
which was already introduced in Eq. (4). Parameter \(\beta \) represents the carrying capacity of the population in the absence of mate limitation multiplied by an individual’s efficiency to find a mate [14, Sect. 2.1]. See Fig. 9 for a graphic representation when \(r=3.5\) and \(\beta =0.5\).

Graphic representation of the Ricker–Schreiber stock–recruitment curve \(F(x)=(0.5 x^2/(1+0.5 x)) \mathrm {e}^{3.5 (1-x)}\). The Allee threshold is the smaller positive equilibrium; population sizes below it cannot survive
There are three generic possibilities for the dynamics of model (10): extinction; bistability between extinction and survival; and essential extinction [13]. The latter means that extinction occurs for a randomly chosen initial condition with probability one. For fixed values of \(\beta \) and \(r\), different harvesting efforts result in the three generic possibilities. For example, we consider the model with constant effort harvesting
For \(\gamma =0\), there is essential extinction (c.f. [14, p. 205]). When constant effort harvesting is applied (see the bifurcation diagram in Fig. 10), a boundary collision switches the dynamics from essential extinction to bistability at a value of \(\gamma _1=0.09384\). A tangent bifurcation leads to extinction at \(\gamma _2=0.91104\), which corresponds to a sudden collapse due to overharvesting. Between \(\gamma _1\) and \(\gamma _2\), the dynamics of the nontrivial attractor ranges from chaos to asymptotic stability of the larger positive equilibrium.

Bifurcation diagram of the Ricker–Schreiber model (12), using the harvesting effort \(\gamma \) as the bifurcation parameter. The three generic possibilities are observed; in case of bistability, the nontrivial attractor is complex for low harvesting rates and becomes an attracting positive equilibrium after a series of period-halving bifurcations for larger harvesting effort
We call the reader’s attention to an unusual behaviour of extinction: populations can persist within a band of medium to high harvesting efforts, whereas extinction occurs for lower and very high harvesting efforts. This phenomenon is also typical of a strategy of constant quota harvesting, and has been uncovered by Sinha and Parthasarathy [17]. For constant effort harvesting in models with Allee effects, it was first demonstrated by Schreiber [14].
The influence of harvest timing in the model (10) has been considered in [2]. Here we just state the main conclusions for the model
where \(\theta \in [0,1]\) and \(F_{\beta ,r}(x)=(\beta x/(1+\beta x)) x\, \mathrm {e}^{r (1-x)}\).
-
For moderate harvesting efforts, intermediate values of the harvest timing \(\theta \) can stabilize the larger positive equilibrium and hence facilitate stabilization—similarly to the models considered in Sects. 2 and 3.
-
For large harvesting efforts (close to the regime of overharvesting), intermediate values of the harvest timing \(\theta \) can render the population more vulnerable to extinction. In this scenario, the population can persist for early- or late-season harvesting, but goes extinct for mid-season harvesting; see Fig. 11. The underlying reason is that intervention time \(\theta \) does change the overharvesting effort, i.e. the critical value of the harvesting effort at which the system switches from survival to extinction. This is in contrast to the models considered in Sects. 2 and 3.
-
For low harvesting efforts (close to the regime of essential extinction), intermediate values of the harvest timing \(\theta \) can prevent essential extinction, which would occur for early or late harvesting.
Hence, intermediate harvest times can be both beneficial (for small and moderate harvesting efforts) and detrimental (for large harvesting efforts). See [2] for more details.

Bifurcation diagram of model (13) with \(F_{4,4}(x)=(4 x/(1+4 x)) x\, \mathrm {e}^{4 (1-x)}\) and harvesting rate \(\gamma =0.875\). For early and late harvesting times, the population can survive at moderate sizes, but the same harvesting effort drives the population extinct if the harvest takes place at intermediate moments of the season
5 Conclusions
In this contribution, we have reviewed the impact of harvesting effort and harvest timing on population dynamics. While a large part of the literature is mainly concerned with the yield obtained from harvesting (e.g., [3]), we have focused on (i) the abundance of the exploited population and (ii) the complexity of the dynamics induced by harvesting, in particular whether harvesting can be stabilizing or destabilizing. Both aspects are crucial for the yield as well as for the sustainability of the population. In the overview of this contribution, we have exclusively considered single-species discrete-time population models. However, they represent a fair amount of different ecological situations as they take into account overcompensation (scramble competition); adult survival (iteroparity) and critical depensation (strong Allee effect).
Regarding population abundance, the most interesting phenomenon is the hydra effect [1, 11, 15]. Average population abundance can increase in response to an increase in the per-capita mortality rate. This phenomenon underlines the importance of census timing, as the hydra effect in parts of the population may be “hidden” from observation and go unnoticed [5].
Regarding the complexity of the dynamics, increased harvesting typically stabilizes population dynamics, but in the presence of adult survivorship it can also be destabilizing. Typical mechanisms are period-halving bifurcations and bubbling [8, 11].
In compensatory models (i.e., without Allee effect), harvest timing does not affect the critical harvesting effort leading to overexploitation and population extinction. Harvesting at an intermediate moment of the season can reduce dynamic complexity, preventing chaos and sometimes stabilizing the positive equilibrium. In models with a strong Allee effect, intermediate harvest timing can enhance both persistence as well as extinction; the actual outcome depends on the magnitude of the harvesting effort [2].
In models with a strong Allee effect, population extinction due to overharvesting may occur in form of a sudden collapse rather than gradually. Intermediate harvesting rates, however, may help the population to survive, preventing essential extinction due to overproduction [14].
To conclude, we emphasize that a good knowledge of the population dynamics is crucially important for designing management programmes of exploited populations. For example, does population growth exhibit exact or undercompensation, overcompensation or depensation? Is the population semelparous or iteroparous? Once the underlying population dynamics is known, it can be equally important to address the aspects of census timing (how many times and at what moments in the seasons the population is measured) and harvest timing. Kokko [6, p. 143] highlighted already in 2001 that
Timing of harvesting may profoundly influence the impact on the population.
In this overview, we have collected further theoretical mechanisms demonstrating the role of harvest timing and that it should not be neglected in comparison to harvesting effort.
References
Abrams, P.A.: When does greater mortality increase population size? The long story and diverse mechanisms underlying the hydra effect. Ecol. Lett. 12, 462–474 (2009)
Cid, B., Hilker, F.M., Liz, E.: Harvest timing and its population dynamic consequences in a discrete single-species model. Math. Biosci. 248, 78–87 (2014)
Clark, C.W.: Mathematical Bioeconomics: The Optimal Management of Renewable Resources. Wiley, Hoboken (1990)
Courchamp, F., Berec, L., Gascoigne, J.: Allee Effects in Ecology and Conservation. Oxford University Press, New York (2008)
Hilker, F.M., Liz, E.: Harvesting, census timing and “hidden" hydra effects. Ecol. Complex. 14, 95–107 (2013)
Kokko, H.: Optimal and suboptimal use of compensatory responses to harvesting: timing of hunting as an example. Wildl. Biol. 7, 141–150 (2001)
Kot, M.: Elements of Mathematical Ecology. Cambridge University Press, Cambridge (2001)
Liz, E.: How to control chaotic behaviour and population size with proportional feedback. Phys. Lett. A 374, 725–728 (2010)
Liz, E.: Complex dynamics of survival and extinction in simple population models with harvesting. Theor. Ecol. 3, 209–221 (2010)
Liz, E., Pilarczyk, P.: Global dynamics in a stage-structured discrete-time population model with harvesting. J. Theor. Biol. 297, 148–165 (2012)
Liz, E., Ruiz-Herrera, A.: The hydra effect, bubbles, and chaos in a simple discrete population model with constant effort harvesting. J. Math. Biol. 65, 997–1016 (2012)
Ricker, W.E.: Stock and recruitment. J. Fish. Res. Bd. Can. 11, 559–623 (1954)
Schreiber, S.J.: Chaos and population disappearances in simple ecological models. J. Math. Biol. 42, 239–260 (2001)
Schreiber, S.J.: Allee effect, extinctions, and chaotic transients in simple population models. Theor. Popul. Biol. 64, 201–209 (2003)
Seno, H.: A paradox in discrete single species population dynamics with harvesting/thinning. Math. Biosci. 214, 63–69 (2008)
Shelton, A.O., Mangel, M.: Fluctuations of fish populations and the magnifying effects of fishing. Proc. Natl. Acad. Sci. USA 108, 7075–7080 (2011)
Sinha, S., Parthasarathy, S.: Unusual dynamics of extinction in a simple ecological model. Proc. Natl. Acad. Sci. USA 93, 1504–1508 (1996)
Stone, L.: Period-doubling reversals and chaos in simple ecological models. Nature 365, 617–620 (1993)
Thieme, H.R.: Mathematics in Population Biology. Princeton University Press, Princeton (2003)
Zipkin, E.F., Kraft, C.E., Cooch, E.G., Sullivan, P.J.: When can efforts to control nuisance and invasive species backfire? Ecol. Appl. 19, 1585–1595 (2009)
Acknowledgments
E. Liz was partially supported by the Spanish Government and FEDER, grant MTM2010–14837. He acknowledges the support and nice hospitality received from the Organizing Committee of the 19th International Conference on Difference Equations & Applications, particularly to Dr. Ziyad AlSharawi. F. M. Hilker acknowledges a Santander research travel grant that facilitated his visit to Universidad de Vigo to collaborate with the first author.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2014 Springer-Verlag Berlin Heidelberg
About this paper
Cite this paper
Liz, E., Hilker, F.M. (2014). Harvesting and Dynamics in Some One-Dimensional Population Models. In: AlSharawi, Z., Cushing, J., Elaydi, S. (eds) Theory and Applications of Difference Equations and Discrete Dynamical Systems. Springer Proceedings in Mathematics & Statistics, vol 102. Springer, Berlin, Heidelberg. https://doi.org/10.1007/978-3-662-44140-4_3
Download citation
DOI: https://doi.org/10.1007/978-3-662-44140-4_3
Published:
Publisher Name: Springer, Berlin, Heidelberg
Print ISBN: 978-3-662-44139-8
Online ISBN: 978-3-662-44140-4
eBook Packages: Mathematics and StatisticsMathematics and Statistics (R0)