
Abstract
Reliability of carrier phase ambiguity resolution (AR) of an integer least-squares (ILS) problem depends on ambiguity success rate (ASR), which in practice can be well approximated by the success probability of integer bootstrapping solutions. With the current GPS constellation, sufficiently high ASR of geometry-based model can only be achievable at certain percentage of time. As a result, high reliability of AR cannot be assured by the single constellation. In the event of dual constellations system (DCS), for example, GPS and Beidou, which provide more satellites in view, users can expect significant performance benefits such as AR reliability and high precision positioning solutions. Simply using all the satellites in view for AR and positioning is a straightforward solution, but does not necessarily lead to high reliability as it is hoped. The paper presents an alternative approach that selects a subset of the visible satellites to achieve a higher reliability performance of the AR solutions in a multi-GNSS environment, instead of using all the satellites. Traditionally, satellite selection algorithms are mostly based on the position dilution of precision (PDOP) in order to meet accuracy requirements. In this contribution, some reliability criteria are introduced for GNSS satellite selection, and a novel satellite selection algorithm for reliable ambiguity resolution (SARA) is developed. The SARA algorithm allows receivers to select a subset of satellites for achieving high ASR such as above 0.99. Numerical results from a simulated dual constellation cases show that with the SARA procedure, the percentages of ASR values in excess of 0.99 and the percentages of ratio-test values passing the threshold 3 are both higher than those directly using all satellites in view, particularly in the case of dual-constellation, the percentages of ASRs (>0.99) and ratio-test values (>3) could be as high as 98.0 and 98.5 % respectively, compared to 18.1 and 25.0 % without satellite selection process. It is also worth noting that the implementation of SARA is simple and the computation time is low, which can be applied in most real-time data processing applications.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
1 Introduction
Global Navigation Satellite Systems (GNSSs) is the generic term for all jurisdictional satellite navigation systems including the United States Global Position System (GPS), Russia’s GLONASS, European Space Agency’s Galileo, China’s Beidou, Japan’s Quasi Zenith Satellite System (QZSS) and India’s Indian Regional Navigation Satellite Systems (IRNSS) [1]. In the very future, there will be 25–45 satellites in view depending on users’ locations. Australia is one of many countries eventually receiving maximum numbers of satellite signals from all six systems simultaneously. O’Keefe et al. have investigated and demonstrated that a combined GNSS system provides significantly improved availability for navigation in obstructed areas, where navigation with GPS alone is currently difficult [2]. Yang et al. have defined and analysed three types of generalised dilution of precision (G-DOP) among different GNSS systems based on robust estimation. However, these performance benefits do not come without cost [3]. Benefits that multi-GNSS and multi-frequency signals can bring to users may be maximized by selective use of satellite systems, or signals, or subset of visible satellites from different systems in order to achieve required positioning performance at affordable costs. This is certainly the case for real-time kinematic positioning or other precise positioning based on successful resolutions of carrier phase ambiguities of satellite signals. This research work will prove that it is possible to select a subset of satellites from two constellations in order to achieve higher reliability of carrier phase ambiguity resolutions, thus assuring the reliability and accuracy of the RTK solutions.
For integer least-squares (ILS) solutions of a linear system with integer parameters, the ambiguity dilution of precision (ADOP) and the ambiguity success rate (ASR) have been introduced to capture and analyze the precision and reliability characteristics of the ambiguities [4–6]. Theoretically only when the ASR is very close to 1, the integer ambiguities can be considered deterministic, thus guaranteeing the precision of fixed solution better that the float solution [7]. Since incorrect ambiguity fixing can lead to largely biased positioning solutions, so it is always worthwhile to have an AR solution with the high ASR. An approach to achieve the high ASR is to apply the concept of partial ambiguity resolution (PAR), which is a technique for fixing a subset of the ambiguities with a higher ASR of resolving them correctly [8]. This study is focused on the geometry-free model; however the success rate of the geometry-based model cannot guaranteed to be increased with less satellites imposed because of the poor geometry. Cao et al. has also numerically demonstrated that the ASR decreases as the number of ambiguities increases and a combination of constellations can achieve a higher ASR in shorter observation periods compared to a single constellation used independently [9]. Wang and Feng have clearly demonstrated that only when the computed success rate is very high, the AR validation can provide the decisions about the correctness of AR close to real world with both low AR risk and false alarm rate [10]. The results from that work also indicate that an advantage of using multi-GNSS signals for PAR is that actually only part of satellites or signals are needed to archive a very high-success rate instead of using all satellites. This is how high reliability of PAR can be achieved with multi-GNSS signals.
In terms of satellite selection algorithms, there are quite a few methods to obtain the minimum DOP with limited satellites which aim at low-cost receivers and meter-level pseudorange positioning. One early contribution was the maximum volume algorithm [11]. The four-step satellites selection algorithm is developed to select four satellites to form near optimal geometry [12]. Park proposed the quasi-optimal satellite selection algorithm for GPS receivers used in low earth orbit (LEO) application, which can select any required number of satellites [13]. A heuristic method combining the maximum volume algorithm and the redundancy technique is developed to mitigate computational burdens while maintaining benefits of the combined navigation satellite systems and called multi-constellations satellite selection algorithm [14]. However, to the best of our knowledge there is no method for selecting a subset of the satellites towards achieving a high reliability of a positioning system. On the other hand, once the number of selected satellite reaches certain numbers, such as more than ten, the variation rate of PDOP values is no longer evident. The improvement of ASR is still remarkable, thus deserving more investigation. Figure 1.1 shows the PDOP, ADOP and ASR of four different ten-satellite subsets from overall fifteen satellites. It is clear that the PDOP values are fluctuating between 0.9 and 1.5, while the ADOP values and the ASR values are portioned into four separate layers. The hierarchical structure of the ASR is more obvious than that of the ADOP. Moreover, it is interesting to see that in some samples, ASR values are very close to 1, which indicates their integer ambiguities will be reliable. This implies that it is possible to find a subset of satellites which maintains both the low PDOP and the high ASR when the total visible satellite number is large enough. This research effort develops and tests a satellite selection strategy that allows high reliability of AR to be achieved with multi-constellations. Results from numerical analysis will confirm that this satellite selection method can result in better ASR outcomes without loss of positioning accuracy.

PDOP, ADOP and ASR of different ten satellites from fifteen satellites
The remainder of this paper is organized as follows. In Sect. 1.2, the measures of least squares solution reliability are described, which are related to the ADOP and the ASR. Section 1.3 describes the Satellite-selection Algorithm for Reliable Ambiguity-resolution (SARA). In Sect. 1.4, numerical experiment results for different constellations are provided to demonstrate the advantage of this proposed algorithm over other satellite selection algorithms and contribution to high reliability of ambiguity resolutions comparing no satellite selection. Finally, the main research findings from this work are summarized.
2 Reliability Criteria for Ambiguity Resolution
Traditionally, reliability is the measure of the capability of a system to detect blunders or biases in the measurements and to estimate the effects that undetected blunders may have on a solution. Redundancy number is an important factor in reliability theory which refers to the contribution of the ith observation of the linear observation system to the degree of freedom (DOF). There are two measures of reliability: internal reliability represented by the minimum detectable bias (MDB) and external reliability quantified by the effect of undetectable bias in the observation [15, 16]. Internal reliability and external reliability are used to characterize the least squares solutions of unknown parameters. The reliability criteria are referred to the parameters to be used in selection of satellites for achieving reliable ambiguity solution in processing GNSS carrier phase measurements. The criteria include concepts of internal and external reliability from the traditional real-value least-squares estimation and the concepts of the ADOP and the ASR that is directly related to the ILS solutions’ reliability. This section will introduce the internal and external reliability concept first, followed by the ADOP and success rate computations and numerical analysis regarding the reliability criteria.
2.1 Internal Reliability and External Reliability
A linear observational model is defined by
where y is the observation vector, x is the unknown parameter vector, e is the random error vector, \( \sigma_{0}^{2} \) is the variance of the unit-weight measurements and Q is the cofactor matrix. We have the weight matrix \( {\mathbf{P}} = {\mathbf{Q}}^{ - 1} \).
The redundancy number ri is given as
with a normal equation matrix
and a cofactor matrix for residuals
The internal reliability measure is represented by the minimal detectable bias (MDB) as [15, 16]
where \( \sigma_{i} \) is the standard deviation of the ith observation, which is a function of the diagonal element of Q vv and \( \sigma_{0}^{2} \); \( \delta \) is the non-centrality parameter depending on the level of significance \( \alpha \)and the power of the test \( \beta \).
The external reliability is the influence of each of the MDBs on the estimated parameters. The effect of the blunder or the bias \( \nabla_{i} \) in ith observation is
where the c-vector takes the form \( (0, \ldots ,1, \ldots ,0)^{T} \), with the 1 as the ith entry of c. Consequently, the impact of the MDB \( \nabla_{0i} \) is given as
Baarda suggested the follow alternative expression:
The value \( \lambda_{0i}^{2} \) is considered to be a measure of global external reliability. When the external reliability becomes large, the global falsification caused by a blunder or bias can be significant [17].
2.2 Adop
Like the PDOP measure commonly used to describe the impact of receiver-satellite geometry on the positioning precision, the concept of the ADOP is introduced to measure the intrinsic precision characteristics of the ambiguities [4]. It is defined as
where \( {\mathbf{Q}}_{{{\hat{\text{N}}}}} \) is the variance–covariance (vc-) matrix of the m-dimensional float ambiguities.
Smaller ADOP values imply more precise estimation of the float ambiguities and higher possibility of successful ambiguity validation. It is suggested that for successful AR the ADOP should be smaller than 0.15 cycles [18]. For a short observation time span, the approximation of the ADOP can be expressed as [19]
where \( \sigma_{p}^{2} \) denotes the variance of code, \( \sigma_{\phi }^{2} \) denotes the variance of phase, \( \lambda_{1} \) and \( \lambda_{2} \) denote the wavelengths of L1 and L2, and k denotes the number of epochs.
2.3 Success Rate
The success rate \( P_{S} \) is defined as follows [5, 20]
where R and \( f_{{\hat{N}}} (x) \) denote the ILS pull-in region and the probability density function of the float ambiguities \( {\hat{\mathbf{N}}} \) respectively. In general, we assume the float ambiguity is normally distributed, e.g., \( N\left( {\mathbf{N},\sigma_{0}^{2} \mathbf{Q}_{{\hat{N}}} } \right) \). Therefore, the success rate can be expressed as
Nevertheless, construction of the ILS pull-in region or Voronoi cell can be complex, the real-time computation of AR success rate is considered difficult and impractical [5, 20]. Fortunately the success rate of bootstrapping estimator has been proved to be a sharp lower bound and good approximations of the actual success rate, expressed as [5, 21]
with
The invariant ADOP can be used to obtain an upper bound for the bootstrapped ASR as [22]
2.4 Reliability Criteria for Satellite Selection
Figure 1.2 shows the redundancy numbers (RNUM), the MDBs and the external global reliabilities (EXTR) of a dual-constellation design matrix for 1,000 samples that can be generated from the experiment data in Sect. 1.4. It is interesting to note that those relevant reliability values are grouped into two separate Clusters. To be specific, the values of RNUM are either close 1 or below 0.9 while the MDB values are either around 0.02 or below 0.2 and the EXTR are either around 0.3 or around 2.5. Besides, Fig. 1.2 also shows the selected satellites with extreme values in terms of RNUM (>0.9), MDB (>0.15) and EXTR (<0.4) are the same. Taking a sample with 10 satellites as an example, the redundancy numbers, the MDBs and the external global reliabilities are listed in Table 1.1. It is shown that the maximum redundancy number and MDB and the minimum external global reliability can be easily identified. The question naturally is whether the removal of the measurements with extreme values from the observation system can sufficiently assure the higher success rate of AR in the ILS solutions. Alternatively, the question is if the high AR success rates necessarily require the removal of the extreme measurements. These questions are not easily answered theoretically. However, Sect. 1.4 will seek the answers to the questions numerically.

The redundancy number, minimum detectable bias and external global reliability of a dual-constellation design matrix for 1,000 samples
3 Satellite-Selection Algorithm for Reliable Ambiguity-Resolution
Based on the given reliability criteria in the previous section, this section presents a satellite- selection algorithm for reliable ambiguity-resolution (SARA), which searches for a subset of satellites with a high ASR and low computational burden. In addition, this algorithm assumes that there are adequate satellites, for instance, in the case of multiple constellations where the PDOP requirement is easy to satisfy. The purpose or the advantage of SARA is to improve the ASR compared to other satellite selection algorithms, whereas, the computation load of SARA is maintained at a low level.
In fact, it is simple to implement the SARA algorithm which only consists of the following four steps.
-
Step 1.
Create a list of visible satellites and form the design matrix A of un-differenced model with all the satellites.
-
Step 2.
Calculate the reliability parameters mentioned in Sect. 1.2.1.
-
Step 3.
Remove the satellite with extreme values.
-
Step 4.
Select the remaining satellites.
Unlike the existing pseudorange-based algorithms, there is no need for a predefined number of selected satellites for SARA, because SARA can make the decision with its own reliability characteristics. As shown in Fig. 1.3 and Table 1.1, the criteria for the extreme redundancy number, the MDB and the external global reliability give the equivalent results. The criterion of selecting the subset of satellites can be based on any of the three parameters. In Step 3, usually there are two options: Option 1 is to remove all the satellites with the extreme RNUM, or MDBs or EXTR values; Option 2 is to remove the satellite with the most extreme value and return to Step 2. Figure 1.3 gives the flowchart of Option 1 and Option 2. Obviously, the second scheme is more complicated. Figure 1.4 shows the ASR difference between these two options based on SARA. It is shown that the ASR performances of these two options are just the same in most samples in spite of having some ignorable difference, smaller than 0.1 % in other samples. Therefore, the SARA algorithm adopts the first option that removes the high redundant satellites at once. The fourteen satellites selected by SARA from eighteen satellites are plotted in Fig. 1.5. Considering inter constellation biases, the different reference satellites are used in their corresponding system respectively.

The two options of SARA algorithm

The ASR difference between option 1 and option 2 in SARA algorithm

The sky plot of selected 14 visible satellites as an example from 18 visible satellites by SARA, □ denotes the selected satellite
4 Experiments and Analysis
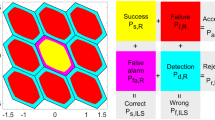
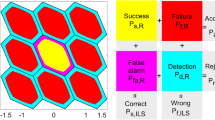
To demonstrate the efficiency of SARA, results from the simulated dual-constellation system (DCS) are analyzed. A total of 2,500 epochs of dual-frequency (L1 and L2) data set collected at the interval of 30 s on 1 January 2007 about a 21 km baseline was processed for analysis. A typical elevation cut-off angle of 15° is used. Prior variance settings for code and phase measurements are given as 30 and 0.5 cm2 respectively. The geometry-based model and the LAMBDA method are used in this experiment and the solutions are resolved epoch-by-epoch in kinematic mode. Similar to the virtual Galileo constellation (VGC) method [23], the virtual Beidou navigation and observation data is generated by the real GPS data with time-latency of 300 epochs. In this work, the SARA uses the extreme redundancy number (RNUM > 0.9) as the criterion to remove all the corresponding satellites as the concept of redundancy number is more familiar and simple too. For ambiguity validation purposes, the ratio-test is applied and the critical values of t are chosen as 1.5, 2 or 3 [24–26]. Moreover, the concept of ambiguity validation decision matrix is utilized to analyse the AR performance of SARA [10]. Particularly, we pay more attention to the probability of false alarm, which means while the integer ambiguity is fixed correctly, but the ratio-test is rejected.
To demonstrate the performance of SARA, especially the improvement of ASR, we calculate and compare different AR factors of using all the visible satellites with those of applying SARA scheme. Figure 1.6 shows the satellite numbers of original dual constellations and those with satellite selection algorithms. SARA can detect and delete more satellites with the increasing of satellites number. It is shown that the maximum deleted satellites number of dual-constellation is 6 and SARA still keeps the minimum satellites number more than 10 in this experiment. Figure 1.7 illustrates the PDOP values from the two cases. As we can see, DCS scheme results in smaller PDOPs, however, the PDOPs of SARA is still good enough with the values from 0.8 to 1.2 due to the enough visible satellites as shown in Fig. 1.6. The PDOPs difference between the two cases is not significant; nevertheless, it is clearly shown that the ADOPs with SARA algorithm are smaller than the DCS in Fig. 1.8. All the epochs with SARA can meet the ADOP 0.15 cycles requirement [18]. Figure 1.9 illustrates the ASR results. A remarkable phenomenon is that the ASR values with SARA are larger than those of DCS. More specifically, most ASR values over the 2,500 samples are over than 90 % and very close to 100 %, whereas the ASR values from the DCS scheme is fluctuated between 0 and 1.

Satellite numbers computed with all visible satellites and SARA

PDOPs computed with all visible satellites and SARA

ADOPs computed with all visible satellites and SARA

ASRs computed with all visible satellites and SARA
For the sake of conciseness, only the results of redundancy numbers are given as Fig. 1.10. Obviously, SARA removes all the observations with the redundancy number of 0.9 or higher. In contrast, the result from the DCS illustrates two distinct structural patterns involving extremely large redundancy numbers.

Redundancy numbers computed with all visible satellites and SARA
Figure 1.11 gives the histograms of AR ratio-test values obtained from DCS and SARA cases. Obviously, compared to DCS, SARA has more numbers of larger ratio-test values. In fact, the real AR probabilities of correct fix (PCF) in DCS and SARA are 100 % in this experiment. However, due to the smaller ratio-test values in DCS, the false alarm rate is higher than that of SARA; hence a lot of correct integer ambiguities are unfortunately rejected by ratio-test. As a result, Fig. 1.12 shows that the positioning performance of DCS is much worse than that of SARA.

Ratio-test values computed with all visible satellites and SARA

XYZ positioning errors computed with all visible satellites and SARA, t > 1.5
Table 1.2 summarizes the percentages of samples whose ratio-test values exceed the given ratio-test critical values (1.5, 2, and 3) and the percentages of samples whose ASR values exceed the given thresholds (0.90, 0.95 and 0.99) in the two cases. These percentages given under different t thresholds (rows 2, 3 and 4) and ASR thresholds (columns 5, 6 and 7) actually indicate, to large extend, the acceptance rates of correct integer solutions and the reliability of AR. From the above figures and Table 1.2, it can be concluded that SARA process gives much higher ASR percentages than these obtained from all the visible. As a specific example shown in Table 1.2, only 82.9, 50.5 and 25.0 % of samples passed the ratio tests using all the satellites in view when the critical value is 1.5, 2 and 3, respectively. These percentage turn out to be 100, 99.7 and 98.6 % if the SARA procedure is applied. In terms of ASR values, it is clearly demonstrated that the SARA process increases those samples with ASR values larger than 0.99 from 18.1 to 98.0 %. This result may vary when different data sets or periods are used, but the distinctive difference indeed shows the significant advantages of the SARA method with respect to the scheme of without adopting satellite selection strategy. Considering the fact that the real PCF in the two cases are 100 %, those events that fail to pass the ratio-test happens to be the corresponding false alarm. Table 1.3 shows the false alarm rates in DCS are larger than those with SARA algorithm. It is easy to understand that when the ratio-test threshold value increases, the false alarm rate is also getting larger. The false alarm rate of DCS increase from 17.1 to 75 % with t = 1.5 and t = 3 respectively, while the case with SARA algorithm still limits the false alarm rate as 1.5 % even t = 3.
In addition to the performance of reliability and accuracy, computation time is also an important factor in real-time applications. Figure 1.13 shows the time cost difference between the two cases as well as the SARA implementation time consuming. It is seen that there is no major difference between these two cases. SARA is expected to spend less time because the dimensions of ambiguities are reduced. However, since the AR reliability is improved by SARA, which also potentially expands larger ambiguity search space. That’s why we have larger ratio-test values. This disadvantage can be overcome by changing the prior search space size with fixed ratio-test value [27]. The computational speed is still a challenging problem for AR with high dimensions [28], but this disadvantage is not caused by SARA itself.

Time cost computed with all visible satellites and SARA
5 Conclusions and Future Work
Benefits from multi-GNSS and multi-frequency signals could be significant, but do not come without cost. Simply using measurements from all satellites in view does not necessarily lead to higher quality solutions, because various biases in different systems. For real time kinematic positioning users, the major benefits of multi-GNSS and multi-frequency signals may be the option for the selective use of satellite systems, or signals, or subsets of visible satellites from different systems to assure the required reliability and accuracy of the RTK solutions.
The paper has developed a new satellite selection algorithm for reliable ambiguity resolution, namely SARA, which can select a subset of visible satellites from a single or multiple constellations based on reliability criteria while giving low PDOP values as well. The purpose is to achieve high ambiguity resolution success rate and reliable position solutions. The principle behind SARA strategy is to remove those satellites with extreme large redundancy number or MDB, or with extremely small external global reliability parameters. Experimental analysis has demonstrated that SARA process gives much higher acceptance rate of correct integer solutions and much higher ASR percentages than these obtained from all the visible satellites in both single and dual constellation cases.
Though the SARA algorithm can select satellite to achieve much higher ASR in a dual-constellation system, there are still some epochs where ASR values are not high enough to assure AR reliability. A possible future research effort may combine the SARA with the partial ambiguity resolution (PAR) algorithm to further improve AR reliability. Ultimately, the proposed algorithms and theory have to pass verification using a large number of real time multi-GNSS data sets, which however are not available yet.
References
Hofmann-Wellenhof B, Lichtenegger H, Wasle E (2008) GNSS—global navigation satellite systems: GPS, GLONASS, Galileo, and more. Springer, New York
O’Keefe K, Ryan S, Lachapelle G (2002) Global availability and reliability assessment of the GPS and Galileo global navigation satellite systems. Can Aeronaut Space J 48:123–132
Yang Y, Li J, Xu J, Tang J (2011) Generalised DOPs with consideration of the influence function of signal-in-space errors. J Navig 64:S3–S18
Teunissen PJG, Odijk D (1997) Ambiguity dilution of precision: definition, properties and application. In: Proceedings of the 10th international technical meeting of the satellite division of the institute of navigation, Kansas City, MO, 16–19 Sep 1997, pp 891–899
Teunissen PJG (1998) Success probability of integer GPS ambiguity rounding and bootstrapping. J Geod 72(10):606–612
Teunissen PJG, Joosten P, Odijk D (1999) The reliability of GPS ambiguity resolution. GPS Solut 2(3):63–69
Verhagen S (2005b) On the reliability of integer ambiguity resolution. Navigation (Washington, DC) 52(2):99–110
Teunissen PJG, Joosten P, Tiberius C (1999) Geometry-free ambiguity success rates in case of partial fixing. In: Proceedings of the 1999 national technical meeting of the institute of navigation, San Diego, CA, 25–27 Jan 1999, pp 201–207
Cao W, O’Keefe K, Cannon M (2007) Partial ambiguity fixing within multiple frequencies and systems. In: Proceedings of ION GNSS07, the satellite division of the institute of navigation 20th international technical meeting, Fort Worth, TX, 2007 Sep 25–28, pp 312–323
Wang J, Feng Y (2012a) Reliability of partial ambiguity fixing with multiple GNSS constellations. J Geodesy (in press). doi 10.1007/s00190-012-0573-4
Kihara M, Okada T (1984) A satellite selection method and accuracy for the global positioning system. Navigation 31(1):8–20
Li J, Ndili A, Ward L, Buchman S (1999) GPS receiver satellite/antenna selection algorithm for the Stanford gravity probe B relativity mission. In: institute of navigation, national technical meeting ‘Vision 2010: Present and Future’, San Diego, CA, 1999 Jan 25–27, pp 541–550
Park C-W (2001) Precise relative navigation using augmented CDGPS. Ph.D. Dissertation, Stanford University, United States
Roongpiboonsopit D, Karimi HA (2009) A multi-constellations satellite selection algorithm for integrated global navigation satellite systems. J Intell Transp Sys Technol Plann Oper 13(3):127–141
Baarda W (1968) A testing procedure for use in geodetic networks. Delft, Kanaalweg 4, Rijkscommissie voor Geodesie
Cross P, Hawksbee D, Nicolai R (1994) Quality measures for differential GPS positioning. Hydrogr J 72:17–22
Verhagen S (2005a) The GNSS Integer Ambiguities: Estimation And Validation. Technische Universiteit Delft, The Netherlands
Verhagen S, Odijk D, Teunissen PJG, Huisman L (2010) Performance improvement with low-cost multi-GNSS receivers. In: Satellite navigation technologies and european workshop on GNSS signals and signal processing (NAVITEC), 5th ESA Workshop on, 8–10 Dec 2010, pp 1–8
Takac F, Walford J (2006) Leica system 1200: high performance GNSS technology for RTK applications. In: Proceedings of ION GNSS 2006, Fort Worth, Texas, 2006 Sep 26–29, pp. 217–225
Hassibi A, Boyd S (1998) Integer parameter estimation in linear models with applications to GPS. IEEE Trans Signal Process 46(11):2938–2952
Feng Y, Wang J (2011) Computed success rates of various carrier phase integer estimation solutions and their comparison with statistical success rates. J Geod 85(2):93–103. doi:10.1007/s00190-010-0418-y
Teunissen PJG (2003) An invariant upperbound for the GNSS bootstrapped ambiguity success rate. J GPS 2(1):13–17
Feng Y (2005) Future GNSS performance predictions using GPS with a virtual Galileo constellation. GPS World 16(3):46–52
Han S, Rizos C (1996) Integrated method for instantaneous ambiguity resolution using new generation GPS receivers. In: Position location and navigation symposium, IEEE 1996, 22–26 Apr 1996, pp 254–261
Wei M, Schwarz KP (1995) Fast ambiguity resolution using an integer nonlinear programming method. In: Proceedings of the 8th international technical meeting of the satellite division of the institute of navigation (ION GPS 1995), Palm Springs, CA, pp. 1101–1110
Leick A (2004) GPS satellite surveying, 3rd edn. Wiley, New York
Wang J, Feng Y (2012b) Orthogonality defect and reduced search-space size for solving integer least-squares problems. GPS Solutions (in press). doi:10.1007/s10291-012-0276-6
Chang XW, Yang X, Zhou T (2005) MLAMBDA: a modified LAMBDA method for integer least-squares estimation. J Geod 79(9):552–565
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2013 Springer-Verlag Berlin Heidelberg
About this paper
Cite this paper
Wang, J., Feng, Y. (2013). A Satellite Selection Algorithm for Achieving High Reliability of Ambiguity Resolution with GPS and Beidou Constellations. In: Sun, J., Jiao, W., Wu, H., Shi, C. (eds) China Satellite Navigation Conference (CSNC) 2013 Proceedings. Lecture Notes in Electrical Engineering, vol 245. Springer, Berlin, Heidelberg. https://doi.org/10.1007/978-3-642-37407-4_1
Download citation
DOI: https://doi.org/10.1007/978-3-642-37407-4_1
Published:
Publisher Name: Springer, Berlin, Heidelberg
Print ISBN: 978-3-642-37406-7
Online ISBN: 978-3-642-37407-4
eBook Packages: EngineeringEngineering (R0)