
Abstract
Falls in the elderly have been recognized worldwide as a major public health problem. Nevertheless, falls cannot be detected efficiently yet, due to open issues on both sensing and processing sides. The most promising sensing approaches raise concerns for privacy issues (e.g., video-based approaches) or low acceptability rate (e.g., wearable approaches); whereas on the processing side, the commonly used methodologies are based on supervised techniques trained with both positive (falls) and negative (ADL-Activity of Daily Living) samples, both simulated by healthy young subjects. As a result of such a training protocol, fall detectors inevitably exhibit lower performance when used in real-world situations, in which monitored subjects are older adults. The aim of this study is to investigate a fully privacy-preserving and high-acceptance sensing technology, i.e. ultra-wideband radar sensor, together with a novelty detection methodology based exclusively on real ADL data from monitored elderly subject. The use of the UWB novelty detection methodology allowed to significantly improve detection performance in comparison to traditional supervised approaches.
Access provided by CONRICYT-eBooks. Download conference paper PDF
Similar content being viewed by others

Keywords
1 Introduction
Nowadays, the most industrialized countries around the world are facing an unprecedented aging of their population. The fastest growing age group is 65 years and older which is expected to cover over a quarter of the population within the next four decades [1].
This demographic phenomenon, also known as “aging society”, has a direct impact on healthcare and elderly care sectors, as well as substantial financial and social implications. In particular, the depletion of healthcare resources is largely attributable to age-related injuries, of which the large majority are associated with falls [2, 3]. In fact, each year about one in three older adults aged 65 or more experiences at least a fall, with serious injuries (e.g., from skeletal fracture to death) in 25% of cases [4, 5].
Among fall-related consequences the so-called “long lie” after a fall (for an hour or more) is particularly critical because it has been associated with pneumonia, dehydration, hypothermia, and high mortality rate (i.e., one in two seniors who reported a long lie died within six months) [6]. In addition, long lies even after a non-injury fall may contribute to the onset of “fear of falling” and social isolation.
In the scenario depicted above, automatic fall detection has become a very active research area, aiming to substantially reduce the worst consequences of falls among the elderly by automatically detecting and signalling the occurrence of a fall event in order to ensure a prompt assistance to the fallen person.
The remainder of the paper is organized as follows: Sect. 2 analyses the state-of-the-art of fall detection solutions, highlighting related works based on radar systems; Sect. 3 starts by giving some background information on the UWB radar technology adopted in this study and, afterwards, describes the experimental setup and collected data, then continues detailing the processing framework, and finally presents the metrics used for performance evaluation; the achieved experimental results and discussion are in Sect. 4; some conclusive remarks are, finally, provided in Sect. 5.
2 State-of-the-Art Analysis
The nowadays available fall detection solutions can be roughly subdivided into two main categories, wearable-based and ambient-based solutions [7]. The most elementary wearable device consists of a push-button worn and actuated by a senior in case of fall. Obviously, such manually-actuated solutions cannot help in case of falls resulting in a lack of conscience or upper extremity paralysis.
Wearable-based automatic fall detectors are based on small-sized devices worn by the senior (usually embedded in garments, belts, etc.), equipped with sensor measuring translational and rotational rates of body’s parts like torso and/or limbs, and able to automatically send help requests in case of detected fall [8]. Normally, such devices use MEMS (microelectromechanical systems) accelerometer and compass sensors in conjunction with some dedicated hardware for online processing and wireless radio communication. Arguably the most stringent requirements they need to be able to satisfy are minimum size and maximum battery life, which are conflicting requirements that are very difficult to meet in real-life applications. In addition, wearable approaches have to deal with issues related to their usage (usability) and acceptance (acceptability) by the user. In this regard, well-known issues are related with forgetting to wear (e.g., after having a bath) or to recharge, accidental damaging, wrong wearing position, and refusing to wear (e.g., due to fear of stigma) [7].
Regarding the ambient-based category, these solutions are based on different kinds of ambient-installed sensors which can be further classified as contact and contactless solutions. In the first case, pressure or contact vibration sensors are integrated on surfaces hit by the person’s body during a fall, such as floor, carpet, bed, chair, and so on [9]. Although the affordability of these sensors, ambient contact solutions require an accurate design or redesign of the home environment making them quite expensive and cumbersome.
In the second case, on the other hand, involved sensing approaches do not require any kind of contact with the environment; the most investigated solutions are based on audio, video and range sensing. Audio- and video-based systems use, respectively, microphones and cameras in order to perform acoustic and visual scene analysis. Fall detectors based on these approaches, especially video-based, are considered reasonably reliable and affordable, although they raise many privacy concerns (e.g., recordings may be accessed by unauthorized users) [7].
Range-based systems use sound or electromagnetic waves outside the human perceptible spectrum. As sensing elements they can use SONAR (Sound Navigation and Ranging), LIDAR/LADAR (Light Detection and Ranging), Range camera and RADAR (Radio Detection and Ranging) sensors [10]. Their main strength lies in the fact that, being active range systems, they are almost totally independent from environmental conditions (e.g., surrounding sounds, lighting, electromagnetic fields). Another important strength is that they work outside the human perceptible spectrum, and thus their range data are not directly usable for obtaining privacy-sensitive information.
Among all range systems mentioned above, the most promising and thoroughly investigated are those based on range cameras and radars. Range camera systems are able to provide, at high frame rates (e.g., up to 50 fps) and within a wide field-of-view (e.g., up to 70°), dense depth images of a scene suitable for real-time 3d visual analysis. Several authors demonstrated the feasibility of using TOF (Time-Of-Flight) or SL (Structured-Light) range cameras for accurately detecting falls [7]. Although the richness of range data provided by TOF/SL cameras, nevertheless they are based on (near-)infrared light waves and so are subject to occlusion problems which are particularly frequent in home environments. In addition, even if only depth data are used (i.e., range cameras usually provide both range and intensity images), privacy concerns are not fully resolved since the person’s silhouette is visible as well.
2.1 Related Works Using Radars
Radar-based systems present many interesting aspects for fall detection, and more general for in-home health monitoring. In fact, they are able to penetrate obstacles so that do not suffer from occlusion problems, and are conceived to deal with highly cluttered and noisy environments. Furthermore, radar systems are much more privacy-preserving than range cameras, since radar data are not directly usable for obtaining any kind of privacy-sensitive information.
By using radar-based systems, various human activities, including falls, can be effectively detected (e.g., high detection rates) via Doppler analysis of their motion signatures. The radar systems adopted for this kind of analysis typically uses narrowband waveforms, in order to achieve high Doppler resolution, especially in presence of fast-moving targets [10].
However, ultra-wideband (UWB) systems, and particularly Impulse-Radio (IR) UWB ones, offer several advantages over narrowband systems, such as low power spectral density (i.e., very difficult to be intercepted, low interferences), short pulse duration (i.e., high penetrating power, multipath immunity, high-speed short-range data transmission), low cost and low power architecture (i.e., almost “all-digital”) [11]. For that reasons, IR-UWB radar has emerged as a multi-purpose technology whose application range spans from detection and measurement of vital signs to human localization/tracking (also through walls), activity detection/classification, and even secure high-throughput wireless communication, just to name a few of its possible uses. Although fall detection has also been demonstrated using UWB radar, nonetheless, to the best of authors’ knowledge, these studies were based almost exclusively on Stepped-Frequency Continuous-Wave (SFCW) systems, which do not offer the same advantages as IR-UWB ones.
On the processing side, the methodologies commonly used for fall detection are based either on threshold approaches or supervised machine learning techniques tuned/trained with both positive (falls) and negative (ADL-Activity of Daily Living) samples, both simulated by healthy young subjects. As a result, due to such a tuning/training protocol, fall detectors inevitably exhibit lower performance when used in real-world situations, in which monitored subjects are older adults [7]. The lack of real-world fall data is an issue common to all fall detection studies, nevertheless only few studies considered datasets collected from real falls of older adults. The number of fall events included in such (not public yet) datasets, however, is low and the fall mechanisms are not adequately documented.
In spite of this unresolved issue, very few attempts have been made to address the fall-detection problem from the complementary point of view, that is, to train the algorithms with only ADLs and then detect falls as novelties or anomalies. To the best of the author’s knowledge, the studies that attempted to do so all used data provided by accelerometer sensors embedded in smartphones [12, 13] or other wearable devices [14], whereas there are no studies in the literature that used radar-based systems to detect falls as novelties/anomalies.
3 Materials and Methods
The purpose of the study presented in this paper is to investigate the ability of micro-Doppler features, obtained with a monostatic IR-UWB radar sensor, to represent micro-movements involved during both ADLs and falls, in a way which is useful for addressing the problem of detecting real-world falls by means of a novelty detection methodology. All details about sensing, experimental setting, processing and performance evaluation are provided in this section.
3.1 Ultra-Wideband Radar Sensing
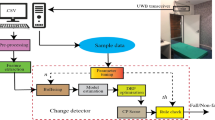
The radar sensor adopted in this study is based on the monostatic sensor module P410 manufactured by Time Domain [15], which is connected via USB to an Embedded PC (EPC). Both devices, P410 and EPC, are presented in Fig. 1. The P410 is a state-of-the-art IR-UWB radar, working from 3.1 to 5.3 GHz centred at 4.3 GHz, covering a distance range of about 30 m, having good object penetrating capabilities and compact (7.6 × 8.0 × 1.6 cm) board dimensions. The P410 is equipped with an omnidirectional antenna, which in this study has been modified by adding a planar back reflector in order to reduce the azimuth pattern to around 100°. Range data from the P410 are processed by the Embedded PC (EPC), which has low computational profile (i.e., Intel Atom processor based), low power consumption (25 W) and reduced (13.2 × 9.5 × 3.7 cm) dimensions.

UWB radar sensor P410 (left) and embedded PC (right)
The EPC runs the processing algorithms, including (as better explained in the following) pre-processing steps and machine learning, for detection of fall events in real-time following a novelty discovering methodology.
3.2 Experimental Setup and Data Acquisition
The experiments were conducted in home-like setting, as pictorially represented in Fig. 2. The P410 was accommodated at about one meter from the floor. For comparison reasons, also a TOF range camera MESA SR4000 [16] was wall-mounted at the height of about 2.40 m with respect the floor.

Home-like setting used for data collection
Both ADLs and falls were performed in a home-like setting by involving ten healthy subjects divided into two age groups of avg. 24 and 48 years old, respectively. Falls were simulated by following the protocol suggested by Noury et al. [17]. For each participant, a total amount of 436 actions were collected, of which 30 were simulated falls and the remaining were daily activities such as walking, sitting down, standing up, and so on.
3.3 Processing Framework
On the algorithmic side, there are three main stages: pre-processing, feature extraction, and event detection. Regarding the pre-processing stage, the scattered radar signal is first filtered by a 16th-order Butterworth (bandpass 3.1–5.3 GHz) and then by a 3-tap FIR motion filter in order to improve the signal-to-clutter ratio. The resulting range profiles are normalized in amplitude and time within a sliding window of time length 1.5 s and distance range up to 8 m. The time duration of 1.5 s was experimentally determined, as that able to discriminate both fast actions (e.g., falls) and slow ones (e.g., voluntary lying down). Amplitudes and times-of-arrival (TOAs) are estimated by peak analysis and tracked with Kalman filter in order to isolate the only target of interest (i.e., the monitored subject). The pre-processed radar signal is shown in Fig. 3.

Pre-processed radar signal referred to a person moving inside a room at a distance of about 4 m from the radar sensor
The extracted features are based on the micro-Doppler effect which is briefly introduced as follows. As well known, the relative motion between radar and target introduces a Doppler frequency shift which relates directly to the radial velocity: movements towards (away from) the radar introduce a positive (negative) frequency shift. Furthermore, a human target consists of different parts (e.g., head, torso, legs, etc.) which move at different velocities during the same action (e.g., walking, sitting, etc.). The multiple Doppler shifts produced by these smaller motions are referred to as micro-Doppler features. The feature extraction process starts by computing the Doppler spectrogram which represents the signal power distribution over velocity (x-axis) and distance (y-axis). In Fig. 4, the Doppler spectrograms of radar scans taken during a simulated fall (Fig. 4a) and walking activity (Fig. 4b) are presented. As evident from Fig. 4a, the spectrogram exhibits horizontally aligned peaks (micro-Doppler) related to movements of body’s parts during the fall event. The Doppler spectrogram is computed by applying the short-time Fourier transform to the analytic form of the radar signal. Hence, the micro-Doppler features are extracted by convolving the spectrogram with a Gaussian filter and summing the power spectrum at all distances for each frequency, in order to obtain one-dimensional micro-Doppler signatures as those reported in Fig. 4c, d associated with the simulated fall (Fig. 4a) and the walking activity (Fig. 4b), respectively.

Doppler spectrum (a) and micro-Doppler signature (c) of a radar scan referred to a person falling down at a distance of about 3 m from the sensor. Doppler spectrum (b) and micro-Doppler signature (d) of a radar scan referred to a person walking at a distance of about 4 m from the sensor
The event detection stage deals with the recognition of a fall occurrence from the extracted features. The commonly used methodologies are based on supervised machine learning techniques trained with both positive (falls) and negative (ADLs) samples, both simulated by healthy young subjects. As a result, due to such a training protocol, fall detectors inevitably exhibit lower performance when used in real-world situations, in which monitored subjects are older adults [7]. In order to address this problem and to improve fall detection performance under real-life conditions, an unsupervised approach has been used in which the fall occurrence is detected as a “novelty” with respect the usual daily activities performed by the monitored subject. In the suggested unsupervised approach, novelties are detected using votes casted by multiple one-class K-means classifiers [18]. For evaluation purpose, a classical supervised detector based on Support Vector Machine (SVM) [19] has been also experimented and its performance compared with the unsupervised one.
Furthermore, to have an additional term of comparison, TOF range data captured with the SR4000 were processed using the fall detection approaches described in [20] and the extracted features (i.e., the person’s centroid temporal trend) were classified using SVM.
3.4 Performance Evaluation
The SVM-based supervised approach was evaluated with both P410 and SR4000 data. More specifically, ADLs and falls performed by the young group were used for training, whereas falls performed by the older group were used for testing. During the training phase, 738 daily actions and 90 falls were used. During the testing phase, instead, the remaining 492 daily actions and 60 falls were used.
Regarding the K-means-based unsupervised approach, since it is oriented to detect falls as novelties among daily “normal” activities (e.g., walking, sitting down, standing up, etc.), it has been validated involving the same subject in both observation and testing phases. The observation phase lasted for about 95 min for each subject (i.e., 190 actions), after which the testing phase started and 30 falls/person were performed.
Fall detection performance was evaluated, according to Noury et al. [17], in terms of sensitivity and specificity which are defined as follows:
where TP, TN, FP, and FN are respectively the True Positives, True Negatives, False Positives, and False Negatives.
4 Experimental Results and Discussion
As summarized in Table 1, the novelty-based unsupervised approach outperformed the (UWB) supervised one without requiring any fall-based training, and thus more reproducible in real-life scenarios. Furthermore, the novelty-based UWB performance was comparable with that obtained using the more specialized TOF vision-based sensing approach. However, it is worth noting that the unsupervised approach requires a preliminary calibration phase during which almost all daily “normal” activities should be observed and labelled as not-fall. In this study, such a calibration phase lasted 95 min per subject, but in real-world it may take much longer depending on habits of monitored subject.
The use of the UWB novelty detection methodology allowed to significantly improve detection performance in comparison to the supervised one, exhibiting performance comparable with that obtained using the more specialized TOF vision-based sensing approach. The presented system may find application for continuous indoor monitoring of older adults living alone. In fact, after a period of observation (i.e., unsupervised training), the system can reliably detect fall events against daily activities. The presence of moving objects (e.g., chairs, sofas, etc.) in the room does not interfere with the event detection, since the Kalman filter allows tracking of peaks associated with a human target in the radar signal.
Furthermore, it is worth to note that because of the high penetrating ability of the UWB radar, the presence of medium-sized objects (e.g., tables, chairs, etc.) between radar sensor and human target does not raise any occlusion problem. Instead, the most serious noise source in indoor environments is the clutter signal containing reflections from stationary structures (e.g., walls, furniture, etc.). In this study the clutter signal has been strongly attenuated by motion filtering the radar signal. However, this technique is not quite effective for through-wall sensing, in which case more sophisticated clutter removal techniques should be adopted.
As already mentioned, the system reliably detects falls when only one person is present in the room (i.e., a living-alone elderly). When two or more people are present, on the other hand, the system takes into account only the movement patterns of the person nearest to the radar sensor, and thus it is able to detect only falls of the nearest subject. Additionally, when two or more people stay at the same radial distance with respect to the radar sensor, their motion patterns may interfere, affecting the detection performance.
5 Conclusion
The main contribution of this work concerns the investigation and validation, in a home-like setting, of a fall detector based on IR-UWB radar sensor able to detect falls as novelties. Moreover, the problem of performance under real-life conditions has been addressed by suggesting an unsupervised approach not requiring fall-based training but only a subject-specific calibration phase based on observation of daily activities. Preliminary results are very encouraging, showing the effectiveness to achieve good detection performance under real-life conditions through IR-UWB-based Doppler analysis and novelty detection, which were not investigated together up to now.
The ongoing work is focused, on one hand, on extending the proposed system to detect falls in multi-user scenarios (e.g., in community dwellings) by facing the multi-target/multi-detection association problem. On the other hand, the future work is to investigate the use the UWB radar sensor also for continuous and unobtrusive in-home monitoring of vital parameters.
References
World Population Prospects: The 2010 Revision (United Nations, New York)
J.C. Davis et al., International comparison of cost of falls in older adults living in the community: a systematic review. Osteoporos. Int. 21(8), 1295–1306 (2010)
S. Heinrich, K. Rapp, U. Rissmann, C. Becker, H.H. König, Cost of falls in old age: a systematic review. Osteoporos. Int. 21(6), 891–902 (2010)
K.E. Ensrud et al., Study of osteoporotic fractures research group. Frailty and risk of falls, fracture, and mortality in older women: the study of osteoporotic fractures. J. Gerontol. A Biol. Sci. Med. Sci. 62(7), 744–751 (2007)
K.E. Ensrud et al., A comparison of frailty indexes for the prediction of falls, disability, fractures, and mortality in older men. J. Am. Geriatr. Soc. 57(3), 492–498 (2009)
J. Fleming, C. Brayne, Inability to get up after falling, subsequent time on floor, and summoning help: prospective cohort study in people over 90. BMJ 337, a2227 (2008)
R. Igual, C. Medrano, I. Plaza, Challenges, issues and trends in fall detection systems. Biomed. Eng. 12(66), 1–66 (2013)
F. Bagalà et al., Evaluation of accelerometer-based fall detection algorithms on real-world falls. PLoS ONE 7(5), e37062 (2012)
M. Mubashir, L. Shao, L. Seed, A survey on fall detection: principles and approaches. Neurocomputing 100, 144–152 (2013)
M.G. Amin, Y.D. Zhang, F. Ahmad, K.D. Ho, Radar signal processing for elderly fall detection: the future for in-home monitoring. IEEE Sig. Proc. Mag. 33(2), 71–80 (2016)
C. Nguyen, J. Han, Time-Domain Ultra-Wideband Radar, Sensor and Components: Theory, Analysis and Design (Springer Science & Business Media, Berlin, 2014)
C. Medrano, R. Igual, I. Plaza, M. Castro, Detecting falls as novelties in acceleration patterns acquired with smartphones. PLoS ONE 9(4), e94811 (2014)
D. Micucci, M. Mobilio, P. Napoletano, F. Tisato, Falls as anomalies? An experimental evaluation using smartphone accelerometer data. J Ambient Intell Humanized Comput. 1–13 (2015)
A. Lisowska, G. Wheeler, V. Inza, I. Poole, An evaluation of supervised, novelty-based and hybrid approaches to fall detection using silmee accelerometer data, in Proceedings of IEEE CCVW, 2015, pp. 10–16
Time Domain (2015, May 27). PulsON® P410 radar kit [Online]. Available: http://www.timedomain.com/
MESA Imaging (2016, Jun 16). SR4000/SR4500 User Manual V 3.0 [Online]. Available: http://www.realtechsupport.org/UB/SR/range_finding/SR4000_SR4500_Manual.pdf
N. Noury et al., Fall detection-principles and methods, in Proceedings of 29th IEEE EMBS, Aug 2007, pp. 1663–1666
T. Kanungo et al., An efficient k-means clustering algorithm: analysis and implementation. Pattern Anal. Mach. Intell. IEEE Trans. 24(7), 881–892 (2002)
C. Cortes, V. Vapnik, Support-vector networks. Mach. Learn. 20(3), 273–297 (1995)
A. Leone, G. Diraco, P. Siciliano, Detecting falls with 3D range camera in ambient assisted living applications: a preliminary study. Med. Eng. Phys. 33(6), 770–781 (2011)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2018 Springer International Publishing AG
About this paper
Cite this paper
Diraco, G., Leone, A., Siciliano, P. (2018). A Fall Detector Based on Ultra-Wideband Radar Sensing. In: Andò, B., Baldini, F., Di Natale, C., Marrazza, G., Siciliano, P. (eds) Sensors. CNS 2016. Lecture Notes in Electrical Engineering, vol 431. Springer, Cham. https://doi.org/10.1007/978-3-319-55077-0_47
Download citation
DOI: https://doi.org/10.1007/978-3-319-55077-0_47
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-55076-3
Online ISBN: 978-3-319-55077-0
eBook Packages: EngineeringEngineering (R0)