
Abstract
In-home monitoring technologies deployed in personal living spaces are increasingly used for the assessment of health status in older adults, through the measurement of relevant at-tributes ranging from vital parameters to activities and behaviors including mobility, gait velocity, movements in bed, and so on. Several studies agree that unobtrusive monitoring (with the exception of video-recording) is generally well accepted by older adults, especially if non-intrusive technologies are adopted (e.g., not need to wear any device) which do not interfere with daily life (e.g., not need to learn new technical skills, no change in routines, etc.). In order to address the problem of in-home automatic fall detection by continuous unobtrusive monitoring, this study investigates the use of a promising ambient technology, that is the ultra-wideband (UWB) radar sensing, which provides rich information but outside the human sensory capabilities (i.e., not directly usable for obtaining privacy-sensitive information) and thus well acceptable by end-users. Moreover, the problem of performance under real-life conditions has been addressed by suggesting an unsupervised approach not requiring fall-based training but only a subject-specific calibration phase based on observation of daily activities. Preliminary results are very encouraging, showing the effectiveness to achieve good detection performance under real-life conditions through unobtrusive monitoring.
Access provided by CONRICYT-eBooks. Download conference paper PDF
Similar content being viewed by others

Keywords
1 Introduction
In-home monitoring technologies deployed in personal living spaces are increasingly used for the assessment of health status in older adults, through the measurement of relevant attributes ranging from vital parameters to activities and behaviors including mobility, gait velocity, movements in bed, and so on. Furthermore, such technologies can also be used to provide more safety (e.g., fall detection) and support with daily activities (e.g., issuing reminders).
Recently, ethical issues concerning technology interventions involving older adults have received increasing attention [1]. Among others, the most common concerns regard privacy (i.e., risks of inappropriate access to personal information) and security (i.e., risks of intrusion through computer systems). However, several studies report that unobtrusive monitoring (with the exception of video-recording) is generally well accepted by older adults, especially if nonintrusive technologies are adopted (e.g., not need to wear any device) which do not interfere with daily life (e.g., not need to learn new technical skills, no change in routines, etc.) [2]. In addition, the good acceptability of unobtrusive monitoring enables the measurement of relevant attributes in continuous modality, producing long-term health data useful for early prediction of heath disorders (e.g., cognitive impairment, dementia, etc.).
In-home monitoring solutions are generally classified into two types: wearable devices and ambient (or context-aware) systems [3]. Wearable-based technologies, typically consisting of embedded MEMS accelerometers/gyroscopes (e.g., fall detection or activity recognition) or skin electrodes (e.g., measurement of vital parameters), suffer from several drawbacks such as limited battery life, the need for on-board processing and/or wireless communication (i.e., both energy-demanding functions), the inconvenience of having to remember to wear a device and the discomfort caused by the device itself. All these drawbacks make the use of wearable devices still far from being suitable for continuous unobtrusive monitoring [4]. On the contrary, the ambient systems are more suitable for this purpose, since they are based on various kinds of sensors deployed in the environment ranging from information-poor but well accepted devices such as simple on/off switches, pressure sensors, infrared sensors and so on, to more information-rich devices, like video cameras, but that raise privacy concerns.
In order to address the problem of in-home automatic fall detection by continuous unobtrusive monitoring, this paper investigates the use of a promising ambient technology, that is the ultra-wideband (UWB) radar sensing, which provides rich information but outside the human sensory capabilities (i.e., not directly usable for obtaining privacy-sensitive information) and thus well acceptable by end-users. Additionally, UWB radar is a multi-purpose technology whose application range spans from detection and measurement of vital parameters to localization, movement detection, and even secure high-throughput wireless communication [5].
2 Materials and Methods
2.1 System Overview
The unobtrusive monitoring system is based on a monostatic sensor module P410 manufactured by Time Domain [6], which is connected via USB to an embedded PC. Both devices are presented in Fig. 1. The P410 is a state-of-the-art UWB radar sensor, working from 3.1 to 5.3 GHz centered at 4.3 GHz, covering a distance range of about 30 m, having good object penetrating capabilities and compact (7.6 × 8.0 × 1.6 cm) board dimensions. The P410 is equipped with an omnidirectional antenna, which in this study has been modified by adding a planar back reflector in order to reduce the azimuth pattern to around 100°. Range data from the P410 are processed by the Embedded PC (EPC), which has low computational profile (i.e., Intel Atom processor based), low power consumption (25 W) and reduced (13.2 × 9.5 × 3.7 cm) dimensions.

UWB Radar Sensor P410 (left) and embedded PC (right)
The EPC runs the processing algorithms, including (as better explained in the following) preprocessing steps and machine learning, for detection of fall events in real-time.
2.2 Algorithmic Framework for Fall Detection
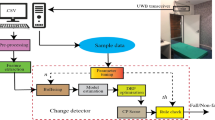
On the algorithmic side, there are three main stages: preprocessing, feature extraction, event detection. Regarding the preprocessing stage, the scattered radar signal is first filtered by a 16th-order Butterworth (bandpass 3.1–5.3 GHz) and then by a 3-tap FIR motion filter in order to improve the signal-to-clutter ratio. The resulting range profiles are normalized in amplitude and time within a sliding window of time length 1.5 s and distance range up to 5 m. The time duration of 1.5 s was experimentally determined, as that able to discriminate both fast actions (e.g., falls) and slow ones (e.g., voluntary lying down). Amplitudes and Times-of-Arrival (ToAs) are estimated by peak analysis and tracked with Kalman filter in order to isolate the only target of interest (i.e., the monitored subject). The preprocessed radar signal is shown in Fig. 2.

Preprocessed radar signal referred to a person moving inside a room at a distance of about 4 m from the radar sensor
The extracted features are based on the Micro-Doppler effect which is briefly introduced as follows. As well known, the relative motion between radar and target introduces a Doppler frequency shift which relates directly to the radial velocity: movements towards (away from) the radar introduce a positive (negative) frequency shift. Furthermore, a human target consists of different parts (e.g., head, torso, legs, etc.) which move at different velocities during the same action (e.g., walking, sitting, etc.). The multiple Doppler shifts produced by these smaller motions are referred to as Micro-Doppler features. The feature extraction process starts by computing the Doppler spectrogram which represents the signal power distribution over frequency (x-axis) and distance (y-axis). In Fig. 3, the Doppler spectrograms of radar scans taken during a simulated fall (Fig. 3a) and walking activity (Fig. 3b) are presented. As evident from Fig. 3a, the spectrogram exhibits horizontally aligned peaks (Micro-Doppler) related to movements of body’s parts during the fall event. The Doppler spectrogram is computed by applying the short-time Fourier transform to the analytic form of the radar signal. Hence, the Micro-Doppler features are extracted by convolving the spectrogram with a Gaussian filter and summing the power spectrum at all distances for each frequency, in order to obtain one-dimensional Micro-Doppler signatures as those reported in Fig. 3c, d associated with the simulated fall (Fig. 3a) and the walking activity (Fig. 3b), respectively.

Doppler spectrum (a) and Micro-Doppler signature (c) of a radar scan referred to a person falling down at a distance of about 3 m from the sensor. Doppler spectrum (b) and Micro-Doppler signature (d) of a radar scan referred to a person walking at a distance of about 4 m from the sensor
The event detection stage deals with the recognition of a fall occurrence from the extracted features. The commonly used methodologies are based on supervised machine learning techniques trained with both positive (falls) and negative (ADL-Activity of Daily Living) samples, both simulated by healthy young subjects. As a result, due to such a training protocol, fall detectors inevitably exhibit lower performance when used in real-world situations, in which monitored subjects are older adults [3]. In order to address this problem and to improve fall detection performance under real-life conditions, an unsupervised approach has been used in which the fall occurrence is detected as a “novelty” with respect the usual daily activities performed by the monitored subject. In the suggested unsupervised approach, novelties are detected using votes casted by multiple one-class K-means classifiers [7]. For evaluation purpose, a classical supervised detector based on Support Vector Machine (SVM) [8] has been also experimented and its performance compared with the unsupervised one.
2.3 Experimental Setup
Both ADLs and falls were performed in a home-like setting, as depicted in Fig. 4, by involving ten healthy subjects divided into two age groups of avg. 24 and 48 years old, respectively. For each participant, a total amount of 436 actions were collected, of which 30 were simulated falls and the remaining were daily activities such as walking, sitting down, standing up, etc. The SVM-based supervised approach has been evaluated using both intra-group and inter-group strategies. More specifically, the first strategy consisted in training and testing the classifier with actions simulated by individuals belonging to the same group. On the contrary, with the second strategy the classifier has been trained with actions simulated by individuals of the young group and tested by involving individuals of the older group. In both strategies, the SVM classifier was trained with 90 falls and 738 daily actions, and was tested with the remaining 60 falls and 492 daily actions.

Experimental setup: home-like setting (left) and radar station (right)
Regarding the K-means-based unsupervised approach, since it is oriented to detect falls as novelties among daily “normal” activities (walking, sitting down, standing up, etc.), it has been validated involving the same subject in both observation and testing phases. The observation phase lasted for about 95 min for each subject (i.e., 190 actions), after which the testing phase started and 30 falls/person were performed.
3 Results and Discussion
As summarized in Table 1 the best performance was achieved using the SVM-based supervised approach validated with the intra-group strategy. Although this performance is comparable with previous studies [9], nevertheless there is no guarantee that it could be achieved under real-life conditions since the classifier needs to be trained with simulated falls. In fact, the performance declined with the inter-group validation strategy, in which falls were simulated by young and tested by older subjects (as happens in real-life). More interestingly, the K-means-based unsupervised approach outperformed the supervised (inter-group) one without requiring any fall-based training, and thus more reproducible in real-life scenarios. However, it is worth noting that the unsupervised approach requires a preliminary calibration phase during which almost all daily “normal” activities should be observed and labelled as not-fall. In this study, such a calibration phase lasted 95 min per subject, but in real-world it may take much longer depending on habits of monitored subject.
The presented system may find application for continuous indoor monitoring of older adults living alone. In fact, after a period of observation (i.e., unsupervised training), the system can reliably detect fall events against daily activities. The presence of moving objects (e.g., chairs, sofas, etc.) in the room does not interfere with the event detection, since the Kalman filter allows tracking of peaks associated with a human target in the radar signal. Furthermore, it is worth to note that because of the high penetrating ability of the UWB radar, the presence of medium-sized objects (e.g., tables, chairs, etc.) between radar sensor and human target does not raise any occlusion problem. Instead, the most serious noise source in indoor environments is the clutter signal containing reflections from stationary structures (e.g., walls, furniture, etc.). In this study the clutter signal has been strongly attenuated by motion filtering the radar signal. However, this technique is not quite effective for through-wall sensing, in which case more sophisticated clutter removal techniques should be adopted.
As already mentioned, the system reliably detects falls when only one person is present in the room (i.e., a living-alone elderly). When two or more people are present, on the other hand, the system takes into account only the movement patterns of the person nearest to the radar sensor, and thus it is able to detect only falls of the nearest subject. Additionally, when two or more people stay at the same radial distance with respect to the radar sensor, their motion patterns may interfere, affecting the detection performance.
4 Conclusion
The main contribution of this work concerns the investigation and validation in a home-like setting of an unobtrusive monitoring system for fall detection based on UWB radar sensor. Moreover, the problem of performance under real-life conditions has been addressed by suggesting an unsupervised approach not requiring fall-based training but only a subject-specific calibration phase based on observation of daily activities. Preliminary results are very encouraging, showing the effectiveness to achieve good detection performance under real-life conditions through unobtrusive monitoring.
The ongoing work is focused, on one hand, on extending the proposed system to detect falls in multi-user scenarios (e.g., in community dwellings) by facing the multi-target/multi-detection association problem. On the other hand, the future work is to investigate the use the UWB radar sensor also for continuous and unobtrusive in-home monitoring of vital parameters.
References
Boise L, Wild K, Mattek N, Ruhl M, Dodge HH, Kaye J (2013) Willingness of older adults to share data and privacy concerns after exposure to unobtrusive in-home monitoring. Gerontechnology Int J Fundam Aspects Technol Serve Ageing Soc 11(3):428
Wild K, Boise L, Lundell J, Foucek A (2008) Unobtrusive in-home monitoring of cognitive and physical health: reactions and perceptions of older adults. J Appl Gerontol 27(2):181–200
Igual R, Medrano C, Plaza I (2013) Challenges, issues and trends in fall detection systems. Biomed Eng Online 12(66):1–66
Hagler S, Austin D, Hayes TL, Kaye J, Pavel M (2010) Unobtrusive and ubiquitous in-home monitoring: a methodology for continuous assessment of gait velocity in elders. Biomed Eng IEEE Trans on 57(4):813–820
Nguyen C, Han J (2014) Time-domain ultra-wideband radar, theory, analysis and design, sensor and components. Springer Science & Business Media, New York
Time Domain (2015, May 27), PulsON® P410 radar kit. Available: http://www.timedomain.com/
Kanungo T, Mount DM, Netanyahu NS, Piatko CD, Silverman R, Wu AY (2002) An efficient k-means clustering algorithm: analysis and implementation. Pattern Anal Mach Intell IEEE Trans on 24(7):881–892
Cortes C, Vapnik V (1995) Support-vector networks. Mach Learn 20(3):273–297
Liu L, Popescu M, Skubic M, Rantz M, Yardibi T, Cuddihy P (2011, May) Automatic fall detection based on doppler radar motion signature. In: IEEE 5th international conference on pervasive computing technologies for healthcare (PervasiveHealth), pp 222–225
Acknowledgements
This work was carried out within the project “ACTIVE AGEING AT HOME” (CTN01_00128_297061) funded by the Italian Ministry of Education, Universities and Research, within the National Operational Programme for “Research and Competitiveness” 2007–2013 (NOP for R&C).
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2017 Springer International Publishing AG
About this paper
Cite this paper
Diraco, G., Leone, A., Siciliano, P. (2017). Unobtrusive Technology for In-Home Monitoring: Preliminary Results on Fall Detection. In: Cavallo, F., Marletta, V., Monteriù, A., Siciliano, P. (eds) Ambient Assisted Living. ForItAAL 2016. Lecture Notes in Electrical Engineering, vol 426. Springer, Cham. https://doi.org/10.1007/978-3-319-54283-6_9
Download citation
DOI: https://doi.org/10.1007/978-3-319-54283-6_9
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-54282-9
Online ISBN: 978-3-319-54283-6
eBook Packages: EngineeringEngineering (R0)