
Abstract
In last years the authors have investigated nonlinear systems for vibrational energy harvesting. Nonlinear configurations have been demonstrated that, under the proper conditions, can provide better performance, compared to linear resonant oscillators, in terms of the amount of energy extracted from environmental wide spectrum mechanical vibrations. In particular, the authors presented the results of investigations on a system exploiting the advantages of a nonlinear bistable Snap-Through-Buckling (STB) configuration and two piezoelectric transducers placed at the locations of the two stable states (the position of the two minima of the bistable potential underpinning the dynamics of the system). The device investigated was shown to be capable of providing sufficient electrical energy to power an RF transmitter. However, in order to properly design the harvester an analytical model is necessary. The authors are investigating different nonlinear models. In this work, a comparison between two different theoretical models for the STB beam is discussed.
Access provided by CONRICYT-eBooks. Download conference paper PDF
Similar content being viewed by others

Keywords
1 Introduction
The development of systems aimed at powering electronic devices by exploiting the energy scavenged from their operating environment is an important line of research driven by the real needs to reduce the dependency on battery power.
The proliferation of small sensors, often networked or deployed in remote regions makes the dependency on battery power an important issue. For instance, wireless sensors might be placed in isolated locations or unsafe environments without the possibility to connect to the main power supply lines; in this case, it would certainly be inconvenient if a battery had to be replaced regularly [1]. A well designed energy harvester (EH), integrated with the sensor, can reduce or possibly eliminate this dependency.
Many different environmental power sources can be exploited to scavenge energy, well known solutions are the solar energy conversion [2], the thermoelectric power generation [3], the radio-frequency (RF) power conversion [4]. In recent times particular attention has been devoted to the mechanical vibration sources [5] because of their ubiquity and the availability of new high-performance materials that can be used to convert mechanical vibrations to a suitable electrical response.
Typical solutions to scavenge energy from vibrations are based on linear resonant mechanical structures like cantilever beams exploiting piezoelectric, macro-fiber composites, electromagnetic or electrostatic conversion mechanism. Such kind of solutions are able to efficiently harvest energy when stimulated very close to their resonance frequency [6]. On the other hand, it has been demonstrated that the exploitation of nonlinear mechanisms such as bistable systems [7], can outperform traditional (linear) energy harvesters under the right set of operating conditions. A possible configuration implementing a nonlinear bistable energy harvester is the Snap Through Buckling structure. The bistable system is a special type of nonlinear structures underpinned by a two well potential energy [7, 8].
The STB configuration allows the inertial mass embedded in the harvester to travel rapidly between the two (stable) equilibrium positions under external mechanical vibrations regardless of their frequencies. This makes possible to access the energy contained in low amplitude wideband vibrations. Moreover, the bistable dynamics yields enhanced device behavior in terms of an extension of the frequency band within which the device is able to scavenge energy from vibrations [9]. This effect represents the main advantage of the nonlinear harvesting setup over the linear one.
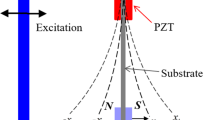
The authors are investigating the mechanical and electrical behavior of buckled beam based nonlinear energy harvesters [9,10,11,12,13] like the one shown in Fig. 1. In particular, in [9] a low cost solution based on a bistable beam and two piezoelectric transducers exploiting the benefits of a Snap Through Buckling (STB) configuration was presented. In [11] the authors presented preliminary experimental results showing the capability of the nonlinear bistable energy harvester discussed in [9] to power (without batteries) a Commercial Off-The-Shelf (COTS) wireless transmitter @ 2.4 GHz. In [12], the use of rapid prototyping techniques for the realization of a nonlinear energy harvester has been introduced. The device exploits the benefits of bistable dynamics and a screen printed piezoelectric layer. The latter was electrically connected using InterDigiTed electrodes (IDT) realized by the inkjet printing of a silver based solution on a flexible PET (PolyEthyleneTerephthalate) substrate.

Schematization of the nonlinear bistable STB harvester [16]
In [13], a comparison between two different theoretical models describing the mechanical behavior of the STB beam has been discussed and quantified by experimental evidence. In addition, preliminary results demonstrating the possibility of exploiting the device in the presence of noise, under some specific operating conditions, were reported.
In [14] preliminary results from the investigations aimed to understand the behavior and the performances of the STB harvester for a different position of the two stable states are presented. In particular, compared to [9] where the two piezoelectric transducers were placed at the stable minima of the potential energy function, here they have been placed near the inflection points of the potential energy function that underpins the dynamics of the nonlinear bistable beam. From a practical point of view and with reference to the schematic shown in Fig. 1, it means that the distance Δx between the two piezoelectrics has been reduced. This makes the STB beam to assume a new “constrained” bistable configuration. The main advantage of this is in the lower accelerations required to switch the beam between the two new constrained stable states.
It should be highlighted that the availability of an EH with a wide frequency bandwidth, ranging from very low frequency (in the order of 0.5 Hz and below) up to 10 Hz, is important for a number of real applications.
However, in order to understand the system behavior and optimize its performance by properly design the EH, both in the mechanical and electrical domains, an analytical model is necessary. In this paper, a comparison between two different theoretical models for the mechanical behavior of the STB beam is discussed and supported by experimental evidences.
2 The Non Linear Energy Harvester
A schematic of the nonlinear bistable harvester is shown in Fig. 1. It consists of a clamped-clamped cantilever beam with a pre-compression applied along the Y axis (in a STB configuration), a proof mass placed in the middle of the beam and two lateral identical piezoelectric transducers. The beam is a strip of flexible PET whose dimensions are 9 cm by 1 cm while its thickness is 140 µm. Two dedicated clamps have been used to block the beam on both ends along the Y axis and to adjust the pre-compression. It should be obvious that changing the pre-compression affects the switching dynamics, e.g. the average switching rate, of the device. The behavior of the device for different values of the pre-compression has been investigated in [9]. On the basis of the results obtained in [9], for the device investigated through this paper, the beam pre-compression has been fixed to ΔY = 3 mm, for the sake of convenience.
In this configuration, the beam exhibits a bistable behavior when a stress is applied perpendicular to its surface. In case the input stimulus exceeds the switching threshold, which is mainly defined by the pre-compression as well as the beam material and geometry, the beam will start switching between its stable positions. In case of a subthreshold signal the beam will vibrate close to one of the two stable states. This behavior is well described and ruled by a two-stable-state potential [9, 12, 13]. It should be obvious that in the bistable potential energy function that describes the dynamics, the energy barrier height as well as the locations of the stable minima of the potential, are a function of the pre-compression.
A proof mass of 9.7 g is used to optimize the trade-off between the operative frequency band and the minimum force that allows the switching. The proof mass has been designed and installed in order to maintain, as much as possible, the device symmetry and to reduce the beam tilt effect.
The piezoelectric transducers, manufactured by Midè (model Volture V21BL), are ultra-thin and light weight devices which convert the beam impacts (in each steady state) into electric charges. The dimensions of the piezoelectric transducers are 9.04 cm by 1.68 cm, while the thickness is 0.8 mm.
The distance between the piezoelectric transducers is fixed to 21 mm, which roughly corresponds to the distance Δx between the two stable positions of the beam.
The behavior of the lab prototype has been experimentally investigated by a dedicated set-up. The main component of the set-up is the shaker, consisting of an aluminum movable platform actuated by a vibration exciter and controlled by a power amplifier. The vibration exciter and the power amplifier are the TV 51110 and the BAA 120 manufactured by TIRA GmbH, respectively. The STB has been fixed on the movable platform of the vibration exciter.
A reference accelerometer, model MMA7331L by Freescale Semiconductor with a sensitivity S = 83.6 mV/g (configured in the operating range of ±12 g), has been also included in order to perform an independent measurement of the imposed stimulus. Moreover, a distance measurement module, model QTR-1A by Pololu, including a very small reflectance InfraRed (IR) sensor and the conditioning electronics, has been included in the STB architecture to continuously monitor the displacement of the proof mass [15, 16]. The output signals from the piezoelectric transducers, the reflectance infrared sensor and the reference accelerometer have been acquired by the MSO9064A scope by Agilent Technologies with a sampling frequency f s = 10 kHz, saved and processed by dedicated Matlab paradigms.
3 The Models for the STB Beam
As already stated before, the beam exhibits a bistable behavior in response to stresses applied perpendicular to its surface. A second order dynamical model fitting the nonlinear mechanical behavior of the system was presented in [9,10,11,12]. A nonlinear quartic potential energy function was used to describe the bistable behavior.
However, the authors are investigating the possibility to adopt new models to better describe the behavior of the device. In this work a first order dynamical model to fit the dynamic nonlinear mechanical behavior, stemming from the experimental observed behavior of the system of Fig. 1 is presented:
where τ is the system time constant, \(\dot{x}\) is the velocity of the beam, \(F(t)\) is a stochastic source characterizing the external mechanical vibrations, and \(\Psi (x) = - \partial U(x)/\partial x\) is the restoring force, with U(x) the potential energy function.
In the following, we compare the model (1) performance with two different nonlinear bistable potentials, a quartic potential and a “soft” hyperbolic one that better reproduces the dynamic behavior observed in the experiments:
By substituting Eqs. (2) and (3), in Eq. (1) the following two dynamical models are obtained, respectively:
The coefficients (a, b) and (a′, b′) were determined via a Nelder-Mead optimization algorithm implemented through a dedicated Matlab script exploiting the following minimization index:
Here, x Meas and x Pred refer to the measured and predicted displacement of the bistable device, respectively. The values of the parameters in (4) and (5) estimated by the optimization algorithm are a = 6.2e−3 N/m3, b = 0.86 N/m, \(a^{\prime}\) = 75.9 m/N, \(b^{\prime }\) = 0.16 N/m.
4 Experimental Results and Conclusions
Figures 2 and 3 show the experimental displacement of the beam in response to a sinusoidal stimulation at 5 and 6 Hz, respectively, for two values of the acceleration, 6.3 and 7.3 m/s2, compared to the displacement predicted by the two models (4) and (5).

Comparison of the experimental displacement of the beam in response to a sinusoidal stimulation at 5 Hz, for two values of the acceleration, 6.3 m/s2 (a, c) and 7.3 m/s2 (b, d) with the displacement predicted by the quartic model (a, b) and the hyperbolic model (c, d)

Comparison of the experimental displacement of the beam in response to a sinusoidal stimulation at 6 Hz, for two values of the acceleration, 6.3 m/s2 (a, c) and 7.3 m/s2 (b, d) with the displacement predicted by the quartic model (a, b) and the hyperbolic model (c, d)
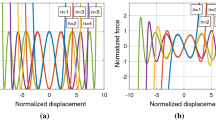
The fitting of the two investigated models with the hysteretic relationship of the accelerations versus displacement, in case of a sinusoidal stimulation of 6.3 m/s2 at 6 Hz is shown in Fig. 4a, b, respectively.

The observed and predicted hysteresis of displacement versus acceleration in case of a sinusoidal acceleration of 6.3 m/s2 at 6 Hz
Finally, a reconstruction of the potential by using the parameters identified for the two models is given in Fig. 5.

Double-well potential reconstruction by using the parameters identified for the two models investigated
The results show a good fitting of both models with real data; however the model (5) shows a slightly better fit than the model (4). This difference stems from the (different) topologies of the potential energy functions in (2) and (3). Actually, potential (3) better describes the observed non-linearity of the device under investigation.
References
M. Ericka, D. Vasic, F. Costa, G. Poulain, Predictive energy harvesting from mechanical vibration using a circular piezoelectric membrane. Proc. IEEE Ultrason. Symp. 2, 946–949 (2005)
D. Brunelli, C. Moser, L. Thiele, L. Benini, Design of a solar-harvesting circuit for batteryless embedded systems. IEEE Trans. Circ. Syst. I: Regul. Papers 56(11), 2519–2528 (2009). doi:10.1109/TCSI.2009.2015690
S. Dalola, M. Ferrari, V. Ferrari, M. Guizzetti, D. Marioli, A. Taroni, Characterization of thermoelectric modules for powering autonomous sensors. IEEE Trans. Instrum. Measur. 58(1), 99–107 (2009). doi:10.1109/TIM.2008.928405
P. Thurein, E.A. Falkenstein, R. Zane, Z. Popovic, Custom IC for ultralow power RF energy scavenging. IEEE Trans. Power Electron. 26(6), 1620–1626 (2011). doi:10.1109/TPEL.2010.2096475
S. Roundy, P. Wright, J. Rabaey, A study of low level vibrations as a power source for wireless sensor nodes. Comput. Commun. 26(11), 1131–1144 (2003)
M. Ferrari, V. Ferrari, M. Guizzetti, B. Andò, S. Baglio, C. Trigona, Improved energy harvesting from wideband vibrations by nonlinear piezoelectric converters. Procedia Chem. 1(1), 1203–1206 (2009)
S. Baglio, A.R. Bulsara, B. Andò, S. La Malfa, V. Marletta, C. Trigona, P. Longhini, A. Kho, V. In, J.D. Neff, G.W. Anderson, C.C. Obra, B.K. Meadows, A. Palacios, Exploiting nonlinear dynamics in novel measurement strategies and devices: from theory to experiments and applications. IEEE Trans. Instrum. Meas. 60(3), 667–695 (2011)
B. Andò, S. Baglio, A.R. Bulsara, V. Marletta, I. Medico, S. Medico, A double piezo—snap through buckling device for energy harvesting, in IEEE 17th International Conference on Solid-State Sensors, Actuators and Microsystems (TRANSDUCERS & EUROSENSORS XXVII), Barcelona, 16–20 June 2013, pp. 43–45
B. Andò, S. Baglio, A.R. Bulsara, V. Marletta, Ass bistable buckled beam based approach for vibrational energy harvesting. Sens. Actuators, A 211, 153–161 (2013)
B. Andò, S. Baglio, V. Marletta, E. Pergolizzi, V. Ferrari, M. Ferrari, A.R. Bulsara, Nonlinear snap-through-buckling devices for energy harvesting from vibrations. Lect. Notes Electr. Eng. 319, 409–413 (2015)
B. Andò, S. Baglio, V. Marletta, A.R. Bulsara, A wireless sensor node powered by nonlinear energy harvester. IEEE Sens. Valencia, Spain, 2–5 Nov 2014
B. Andò, S. Baglio, A.R. Bulsara, V. Marletta, V. Ferrari, M. Ferrari, A low-cost snap-through buckling inkjet printed device for vibrational energy harvesting. IEEE Sens. J. 15(6), 3209–3220 (2015)
B. Andò, S. Baglio, A.R. Bulsara, V. Marletta, A. Pistorio, Experimental and theoretical investigation of a nonlinear vibrational energy harvester. Eurosens. XXIX, Procedia Eng. 120, pp. 1024–1027, Freiburg, 2015, doi:10.1016/j.proeng.2015.08.701
B. Andò, S. Baglio, A.R. Bulsara, V. Marletta, A. Pistorio, A low threshold bistable device for energy scavenging from vibrations. IEEE Sens. Appl. Symp. (SAS), Catania, Italy, 20–22 April 2016. doi:10.1109/SAS.2016.7479816
B. Andò, S. Baglio, A.R. Bulsara, V. Marletta, A. Pistorio, Investigation of a nonlinear energy harvester. IEEE Trans. Instrum. Meas. doi:10.1109/TIM.2017.2663178, available from: http://ieeexplore.ieee.org/document/7858786/, Accessed: 23 March 2017
B. Andò, S. Baglio, V. Marletta, A. Pistorio, A.R. Bulsara, Performance investigation of a nonlinear energy harvester with random vibrations and subthreshold deterministic signals. IEEE Trans. Instrum. Meas. doi:10.1109/TIM.2017.2649998, available from: http://ieeexplore.ieee.org/document/7837607/, Accessed: 23 March 2017
Acknowledgements
The authors gratefully acknowledge support from the US Office of Naval Research (ONR-30), and the Office of Naval Research Global (ONRG). This research activity is developed under the grant “Advanced nonlinear energy harvesters in the mesoscale: exploiting a Snap-Through Buckling configuration, for the autonomous powering of electronic devices. ONR_N62909-15-1-2015”.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2018 Springer International Publishing AG
About this paper
Cite this paper
Andò, B., Baglio, S., Bulsara, A., Marletta, V., Pistorio, A. (2018). Modeling Investigation of a Nonlinear Vibrational Energy Harvester. In: Andò, B., Baldini, F., Di Natale, C., Marrazza, G., Siciliano, P. (eds) Sensors. CNS 2016. Lecture Notes in Electrical Engineering, vol 431. Springer, Cham. https://doi.org/10.1007/978-3-319-55077-0_33
Download citation
DOI: https://doi.org/10.1007/978-3-319-55077-0_33
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-55076-3
Online ISBN: 978-3-319-55077-0
eBook Packages: EngineeringEngineering (R0)