
Abstract
Numerical models can provide the needed information for understanding hypoxia and ensuring effective management, and this book provides a snapshot of representative modeling analyses of hypoxia and its effects. In this chapter, we used the modeling and analyses across the other 14 chapters to illustrate 8 themes that relate to the general strengths, uncertainties, and future areas of focus in order for modeling of hypoxia and its effects to continue to advance. These themes are role of physics; complexity of the dissolved oxygen (DO) models; oxygen minimum zones (OMZs) and shallow coastal systems; observations; vertical dimension; short-term forecasting; possible futures; and ecological effects of hypoxia. Modeling the dynamics and causes of hypoxia has greatly progressed in recent decades, and modern models routinely simulate seasonal dynamics over 0.1–1 km scales. Despite these advances, prevailing model limitations include uncertain specification of boundary conditions and forcing functions, challenges in representing the sediment-water exchange and multiple nutrient limitation, and the limited availability of observations for multiple contrasting years for model calibration and validation. A major challenge remains to effectively link the water quality processes to upper trophic levels. A variety of approaches are illustrated in this book and show that quantifying this linkage is still in the formative stages. There will be increasing demands for predicting the ecological responses to hypoxia in order to quantify the ecological benefits and costs of management actions and to express the simulated effects of coastal management and climate change in terms of direct relevance to managers and the public.
Access provided by CONRICYT-eBooks. Download chapter PDF
Similar content being viewed by others

Keywords
15.1 Introduction
Hypoxia is increasing in coastal and oceanic waters worldwide (Stramma et al. 2008; Zhang et al. 2010). Increasing hypoxia is manifested in more locations showing low dissolved oxygen (DO) conditions (e.g., Chan et al. 2008) and hypoxia becoming more severe in terms of its magnitude (e.g., areal extent) and duration (Diaz and Rosenberg 2008). Modeling is an important tool for understanding the timing and spatial dynamics of hypoxia, and how hypoxia affects key biological populations and the food web. Field observations provide the empirical basis for model development and for assessing the skill of physical and biological simulations, but using field data to directly quantify the spatial and temporal dynamics of hypoxia and to decipher the contribution of the multiple physical and biological factors that contribute to hypoxia development is difficult. Once hypoxic conditions are documented (either through field data or model predictions), using field data to quantify the effects on individual fish and other upper trophic level organisms is possible, but critical issues prevent the direct extrapolation of the individual effects to the population level (Rose et al. 2009). Restoration actions are often costly and therefore knowing the causes of hypoxia (e.g., nitrogen versus phosphorus; riverine versus shelf waters), and quantifying the ecological benefits of management actions designed to reduce hypoxia (e.g., increased fish populations) helps design effective management actions.
Numerical models can provide the needed information for understanding hypoxia and ensuring effective management via predictive simulations and diagnostic model-based experiments. This book provides a snapshot of representative modeling analyses of hypoxia and its effects. Collectively, these models allow us to assess where we are and discuss where, perhaps, we should be going. In this chapter, we discuss 8 topics or themes that span across multiple chapters. These themes are as follows: (1) role of physics; (2) complexity of the DO models; (3) oxygen minimum zones (OMZs) and shallow coastal systems; (4) observations; (5) vertical dimension; (6) short-term forecasting; (7) possible futures; and (8) ecological effects of hypoxia. We use the models presented in the various chapters, supplemented with other examples from the literature, to illustrate each of these themes (Table 15.1) and to offer our prognosis for future efforts.
15.2 Emerging Themes
15.2.1 Theme 1: Role of Physics
Hypoxia models that include hydrodynamics have progressed over the past decade, and regional models are now capable of simulating physics on the scale of a few hours and kilometers. Global and regional physical models have been trending toward consideration of finer and finer spatial resolution (Thomas et al. 2008; Kirtman et al. 2012; Holt et al. 2014). Regional and subregional models now can simulate velocities, temperature, and salinity with sufficient detail to capture mesoscale (10’s of kilometers) and some submesoscale (kilometer) phenomena (e.g., Hetland 2017) and provide a sound basis for including variables related to biogeochemical processes and water quality (including DO). All of the hydrodynamic models used in this book resolve horizontal scales on the order of a few kilometers.
Further resolving the physics may improve model skill in some cases and help improve simulation of DO concentrations. However, mesoscale and submesoscale variability, when resolved in high-resolution models, can create stochastic variability (sensu Lorenz’s butterfly effect) that leads to uncertainty in simulated distributions of physical properties (Marta-Almeida et al. 2013) and DO (Mattern et al. 2013). Submesoscale phenomena are increasingly being considered for their effects on phytoplankton and productivity (Levy et al. 2012; Mahadevan 2016). We expect that the higher resolution simulation of physical dynamics will allow for more detail in spatiotemporal variation of hypoxia, but will not result in dramatic improvement in model skill for DO at the scale of 0.1–1 km. The physics simulated in the present models appear sufficient to capture the major effects on hypoxia formation and dynamics at the kilometer scale.
Boundary conditions and forcings for the hydrodynamics (and water quality) are critical for accurately simulating the dynamics of hypoxia and understanding the causes of hypoxia formation (e.g., Monteiro et al. 2011; Fennel et al. 2013), and uncertainties about specification of boundary conditions and forcings remain an issue. The hydrodynamics of both OMZs and coastal systems can be sensitive to the fluxes at their boundaries with the adjacent open ocean (Blumberg and Kantha 1985; Koch et al.—Chap. 9), and coastal systems are often heavily influenced by riverine inputs at their landward boundary (e.g., Hetland and DiMarco 2012). Allahdadi and Li (Chap. 1) used a 1-month simulation of rising temperatures in a 3-D hydrodynamic model (FVCOM) to examine how solar heating would lead to stronger stratification on the Louisiana shelf; simulated DO declined during the same time period.
Bravo et al. (Chap. 2) used a model of Green Bay nested in a POMS model of Lake Michigan and 5-year averaged results for the summertime to compare the relative importance of heat flux, wind, and circulation (including at the Lake Michigan boundary) on stratification. They show that the wind shift in direction, typically in June, sets up a stable period during which conditions are conducive to formation of hypoxia until mixing in September.
Hetland and Zhang (Chap. 3) make innovative use of a dye (tracer) simulation study (summer 2008) to quantify the contribution from two rivers (Mississippi and Atchafalaya) to Louisiana shelf waters in the same location of historical hypoxia. The two rivers contribute water with different constituent characteristics (e.g., inorganic nitrogen concentration), and their modeling results show that the relative contribution of the two rivers varies temporally by month and spatially across the hypoxic region.
Koch et al. (Chap. 9) used a ROMS-NAPZD (nitrate, ammonium, phytoplankton, zooplankton, and detritus) model for the Oregon shelf and show the importance of accurate boundary conditions. They discuss how the commonly used approach of using larger-scale models to generate boundary conditions for their model was especially challenging because of the resolution needed by their local shelf model.
The ever-increasing computing power will allow for multiple simulations and use of model ensembles to better capture within-year and interannual variability as well as inherent uncertainty in the simulated physics and hypoxia. Increasing computing power will also help with conducting Monte Carlo style uncertainty analysis of the physics and associated water quality via input variation and use of alternative process formulations. To date, the limited formal quantification of uncertainty with hypoxia models can prevent the use of modeling results by the management community because interpretation of results across scenarios is hindered by not including realistic variability around model predictions. Numerically efficient methods for quantifying uncertainty in 3-D hypoxia models (e.g., Mattern et al. 2013) are needed.
15.2.2 Theme 2: Complexity of the DO Models
Determining the appropriate complexity of the water quality models to generate DO dynamics remains an ongoing issue in water quality and nutrient–phytoplankton–zooplankton (NPZ) model development (Denman 2003; Litchman et al. 2006; Friedrichs et al. 2007). While there are differences among the models reported here, there seems to be a consensus about the general form of the models needed to generate sufficiently realistic DO dynamics. In line with previous simple DO models (e.g., Hetland and DeMarco 2008; Scully 2013; Li et al. 2015; Yu et al. 2015; Fennel et al. 2016), Brush and Nixon (Chap. 4) offer a relatively simple DO model that they term “hybrid empirical-mechanistic.” They use this term to reflect the fact that the model tracks relatively few state variables and uses relationships roughly fitted to data derived from across system studies to represent some processes. In this sense, they sacrifice mechanistic representation in favor of a simpler (and easier to apply) statistically based relationship.
Testa et al. (Chap. 5) directly address the complexity issue by comparing the performance of three models designed to simulate DO in Chesapeake Bay. The models were a 17-box (9 surface and 8 bottom) system with a detailed water quality model (23 compartments), a detailed 3-D hydrodynamic model (ROMS) coupled to a simple DO submodel, and ROMS with the 23-compartment model. All models simulated 1996–2005, and Testa et al. (Chap. 5) offer insights into the factors controlling hypoxia by each of the models. They also highlight how the box model version reproduces seasonal and regional patterns in DO but is limited in resolving lateral dynamics, how the ROMS with the simple DO model is useful for examining wind and tidal mixing and freshwater input effects but is limited in its ability to simulate interannual variation in hypoxia, and how the ROMS with the complex DO model dynamics is capable of addressing these shortcomings but requires significant computing and the most observations to develop sufficient model confidence. Their analysis emphasizes that the complexity of the modeling must be tailored to the specific questions being asked: regional patterns in biogeochemistry (box model with simple DO model), climate effects on DO (ROMS with simple DO model) and interannual variability, biological responses to nutrient loadings, or fine-scale physical effects (ROMS with complex DO model).
Finally, Wiggert et al. (Chap. 6) used sensitivity analyses with a 3-D ROMS-NPZD (NPZ plus detritus) model applied to 1999 data for the Chesapeake Bay to examine how alternative parameter values emphasize and understate key processes that affect model skill. For example, they increased the sinking velocity of large detritus that promoted the flux of organic matter to the benthos, and reduced the half-saturation coefficient that affected denitrification and thus amplified DO consumption within the water column. They used the agreement among the predictions of the alternative versions with data to demonstrate how improvements in the degree of correspondence with one variable (e.g., hypoxia persistence) by certain parameter changes involve some loss of agreement with other variables (e.g., poorer fit for dissolved inorganic nitrogen).
While the complexity of the model being dictated by the questions is a well-known best practice (Wainwright and Mulligan 2005; Rose et al. 2015a), it is sometimes not given enough consideration because there are existing codes and models available that make their use convenient. The reasoning behind the final model structure that is used in an application should be clearly explained and documented. This is needed for transparency (why models differ within and across systems) and ultimately will affect the credibility of the modeling results.
The models also highlight two long-standing critical uncertainties in modeling hypoxia: multiple nutrient limitation (Howarth 1988; Flynn 2003; Moore et al. 2013) and processes at the sediment-water interface (Fennel et al. 2013; Testa et al. 2013). Laurent and Fennel (Chap. 7) directly address the role of phosphorus limitation in areas of coastal hypoxia. They review several well-studied systems and derive a conceptual model that views phosphorus limitation effects on hypoxia as spatial and timing shifts by categorizing ecosystems as dominated by flow-through versus open-dispersive physical processes. By use of a 3-D ROMS coupled to a NPZD-type model of the Louisiana shelf, which is dominated by river inputs, they use simulations for multiple years (highlighted with 2004) based on nitrogen-only limitation and with both nitrogen limitation and phosphorus limitation to demonstrate how consideration of phosphorus limitation resulted in a reduced and westward shift of the hypoxic zone.
The sediment-water exchanges often play a large role in affecting nutrient and DO dynamics (Middleburg and Levin 2009; Lehrter et al. 2012), and Voss et al. (2013) documented the importance of the sediment-water exchanges for the nitrogen budget (and thus DO dynamics) in both shelf and coastal systems. Kemp et al. (1992) and Heip et al. (1995) have emphasized that sediments have strong impacts on the water column in shallow coastal ecosystems. Fennel et al. (2013) used a similar model setup as Laurent and Fennel (Chap. 7) and found that projections of summertime hypoxia for the Gulf of Mexico were very sensitive to the formulation used for sediment oxygen consumption. Most of the chapters that focus on water quality and DO at least mention the uncertainty associated with representing the sediment-water interface and exchange (e.g., Brush and Nixon—Chap. 4; Testa et al.—Chap. 5; Laurent and Fennel—Chap. 7).
Two emerging areas in plankton ecology that were not represented in the DO models but may be worth considering are more refined representation of the microbial loop (Treseder et al. 2012) and the idea of internal stoichiometry of phytoplankton (Glibert et al. 2013; Bonachela et al. 2015). The field data collection for microbial organisms and processes, including those that affect nutrient biogeochemistry, is rapidly advancing, and Reed et al. (2014) provide a strategy for incorporating these types of data into water quality and plankton models. For example, Ayata et al. (2013) incorporated different formulations for internal stoichiometry into a 1-D vertical NPZD model. How improving the representation of microbial processes and nutrient dynamics of phytoplankton will help the simulation of DO is not clear for present-day conditions in many systems, but may need to be considered under management scenarios of reduced nutrient loadings (coastal systems) and for climate change (coastal and OMZs).
15.2.3 Theme 3: Ocean and Shallow Ecosystems
Koch et al. (Chap. 9) discuss how the past emphasis on hypoxia in coastal systems has resulted in a focus on the role played by nutrient inputs via large rivers. The hypoxia of shelf-oriented oxygen minimum zones (OMZs) is gaining attention (Stramma et al. 2008; Altieri and Gedan 2015; Levin and Breitburg 2015). Koch et al. (Chap. 9) used a ROMS-NAPZD model (NPZD plus ammonium) for the Oregon shelf, where hypoxia is seasonal and linked to upwelling favorable winds. They simulated the 2002–2006 period focusing on vertical profiles and report the results of a sensitivity analysis that varied initial and boundary conditions of nitrate and used budgets to assess the relative importance of physical versus biological drivers on DO dynamics.
In addition to OMZs and major coastal hypoxic zones, there is increasing attention to modeling hypoxia in small shallow coastal systems that show rapid changes in DO, often influenced by local conditions (Shen et al. 2008; Soetaert and Middleburg 2009; Tyler et al. 2009). Brush and Nixon (Chap. 4) make a strong case for modeling eutrophication and hypoxia in shallow coastal systems. While the major coastal hypoxic zones such as the Chesapeake Bay and the Louisiana shelf garner a lot of attention, the shallow subestuaries often experience very high rates of nutrient loading that can be mediated by local management decisions. Given the limited site-specific data for these shallow systems, Brush and Nixon (Chap. 4) present a reduced complexity model developed to allow for easy application and portability among different systems. They then applied the model to Greenwich Bay (mean depth of 2.6 m), a subestuary of Narragansett Bay, and performed a one-year simulation that matched monitoring data. The bay was divided into 7 spatial elements and two vertical layers, and water and material exchanges were based on salinity distributions and freshwater inputs rather than on hydrodynamics. The model was successfully calibrated to surface chlorophyll-a biomass, dissolved inorganic nitrogen (DIN), and dissolved inorganic phosphorus (DIP) by spatial segment and to bottom layer DO by spatial segment. They also compared simulated and observed process rates, such as water column production and respiration.
These models represent a broadening of the types of systems being investigated and offer both new opportunities for model development and testing and for using models for management. OMZs bring in the dynamics of the middle and deeper water column on the continental shelf, and the shallow systems provide a test bed for diurnal DO cycles and the role of sediments in shallow systems. Greater cooperation between the seemingly distinct OMZs and coastal hypoxia research is needed (Levin and Breitburg 2015), and this also applies to the modeling. While the major estuarine and coastal systems (e.g., Chesapeake Bay and Louisiana shelf) involve large systems and major monetary investments for restoration, the OMZs are an indicator of ocean conditions (Stramma et al. 2008; Paulmier and Ruiz-Pino 2009). There is also a growing number of small shallow systems experiencing hypoxia that, when combined, can add up to significant cumulative environmental impacts. While DO models can be implemented relatively easily in the shallow systems, a limiting factor is the availability of data for model configuration (e.g., bathymetry), calibration, and validation.
15.2.4 Theme 4: Observations
Maintaining long-term monitoring efforts for water quality and DO remains a challenge. Several models used observations from station-based monitoring for calibration and validation. Allahdadi and Li (Chap. 1) make extensive use of a set of monitoring stations (WAVCIS) located on the Louisiana shelf to derive boundary conditions (e.g., wind data) and assess model skill (currents, SST). Bravo et al. (Chap. 2) illustrate how historical observations, strategically augmented with new measurements, can provide a sound basis for model evaluation. Testa et al. (Chap. 5) provide an illustration of the value to modeling of the long-term monitoring data available for the Chesapeake Bay; they used the data to generate Taylor diagrams and examined interannual variation to permit skill assessment of 3 models of differing complexity. Wiggert et al. (Chap. 6) similarly make use of the extensive monitoring data for the Chesapeake Bay by focusing on monthly measurements (salinity, chlorophyll, and nutrients) from a series of stations sampled for one year (1999) that represented “average” conditions. They used an index of agreement that included both vertical gradients and 27 stations in the summary index of the scaled differences between predicted and observed values. Lehrter et al. (Chap. 8) in their analyses of the Gulf of Mexico using a 3-D hydrodynamic NPZ model assess model skill based on 3 cruises (April, June, and September) at a grid of stations for 2006. They computed bias, RMSE, and model efficiency metrics for temperature, nitrate, chlorophyll, salinity (pycnocline), and DO on a station basis and also with the station observations aggregated into subregions (median for surface and bottom layers). They also compared model results to observations for two stations in detail and used the LUMCON-based mid-July estimate of hypoxia to assess total area and its spatial distribution. Some models made use of intensive monitoring studies that were of 1- to 2-year duration (e.g., Brush and Nixon, Chap. 4—1996–1997, Bravo et al., Chap. 2—1989, Lehrter et al., Chap. 8—2006). These clearly demonstrate how observations inform the development and validation of the models, which is required to establish model credibility for management use.
Whereas water quality and DO monitoring data are well suited for numerical model evaluation because the purpose of monitoring and modeling is similar, the monitoring of fish and shellfish is done for a variety of other reasons than detecting hypoxia effects. Long-term fish monitoring is typically done to make tactical management decisions (e.g., opening an area for harvest and consumption advisories) or for developing indices of abundance used for fisheries stock assessment and management. The Ecospace application to the Louisiana shelf (de Mutsert et al. Chap. 14) used fish biomass time series derived from long-term fishery-independent monitoring for model calibration. They showed improved model fit to the data when hypoxia effects were included. However, in general, such time series reflect the effects of many factors and so it is difficult to use the data to calibrate or validate a model specifically to confirm (cause-and-effect) simulated hypoxia effects (Chesney and Baltz 2001). Rose et al. (Chap. 13) discuss difficulties in using monitoring data for fish to detect hypoxia effects at the level of recruitment or higher. They used the simulated effect of hypoxia on croaker recruitment in the Gulf of Mexico to establish a realistic “effect” of a 20% reduction under historical hypoxia conditions. Using long-term field data on croaker, the interannual variability in recruitment was estimated and a Monte Carlo simulation used to determine the likelihood of detecting the hypoxia effect (knowing it is present) with sampling (5, 10, and 25 years) that included the variability estimated from the field data. The probability of detecting the known hypoxic effect with reasonable sampling and realistic interannual variability in recruitment is very low. Thus, long-term monitoring of water quality and DO must be maintained, and we need to develop creative ways to use the fish and upper trophic level data, designed and collected for other purposes, for model development and testing. The Gulf of Mexico Hypoxia Watch (https://www.ncddc.noaa.gov/hypoxia/) is an example where data from multiple water quality and fish surveys are merged.
In general, focused studies that are limited to a few years or less generate the observations to investigate the effects of hypoxia on fish. These studies are immensely useful for modeling. For example, Thomas et al. (2015) measured how croaker exposure in the summer affected their fecundity in the fall, and these results were critical to the development of a croaker population dynamic model (Rose et al. in review) that projected the population-level responses of croaker to hypoxia in the Gulf of Mexico. A several year intensive study allowed clear documentation of the response of zooplankton abundance and spatial distribution to hypoxia (Roman et al. 2012). Such studies could be even more helpful to modelers if they were repeated for multiple, contrasting years and their quantified effects were scalable beyond the study area to an area relevant to the population and food web levels.
A major gap is the lack of observations on the movement patterns of fish and other biota. As the modeling moves toward linking water quality to the upper trophic levels, the representation of movement of individuals in the spatially and temporally dynamic environment generated by the hydrodynamics-water quality models will become critical. A major pathway of hypoxia effects is determined by the effectiveness of the avoidance movement of individuals (determines direct effects via exposure), and where they get displaced to and what environmental and ecological conditions they experience (indirect effects) in the new locations. While the data on animal movement in general are constantly improving (McClintock et al. 2013; Bestley et al. 2016; Sippel et al. 2015), LaBone et al. (Chap. 10) reports on the difficulties in trying to use individual movement data presently available for testing model predictions of fish avoidance of hypoxia.
15.2.5 Theme 5: Vertical Dimension
Simulating hypoxia and its effects on biota requires accuracy in both the horizontal and vertical dimensions. This is needed to generate reliable estimates of hypoxia extent (area, volume, see Obenour et al. 2013) and also because many organisms show vertical movements (Cohen and Forward 2009; Gutowsky et al. 2013). Avoidance behavior can occur both by horizontal and by vertical movement, with the mix being dependent on the species involved. Wiggert et al. (Chap. 6) make extensive use of the vertical aspects of the monitoring data available for the Chesapeake Bay in their analysis by including the vertically resolved data in their goodness-of-fit measure. Koch et al. (Chap. 9) use a ROMS-NAPZD model for the Oregon shelf, where vertical resolution is critical because of the deep-water location of the hypoxia zone.
In a subsequent analysis, LaBone (2016) extended the 2-D simulation of avoidance of fish within FVCOM for the Gulf of Mexico reported here by LaBone et al. (Chap. 10) by allowing individuals to also move vertically. For the 3-D scenario that allowed for vertical avoidance and the simulated exposure of the individuals to lethal DO concentrations as they moved within the FVCOM grid over 10 days was greatly reduced, while the exposure to sublethal DO concentrations under 3-D remained similar to the 2-D (horizontal) scenario. LaBone (2016) also noted that the model assumes that there are no additional costs (e.g., swimming and predation risk) associated with moving vertically.
Kolesar et al. (Chap. 11) specifically focus on how movement in the vertical dimension creates changes in the overlap between zooplankton, fish larvae, and ctenophores, with larvae and ctenophores both eating zooplankton and ctenophores also eating larvae. They showed with summertime simulations in a 3-layer vertical box model that hypoxia-induced shifts in movement (plus direct effects on growth and mortality) did not alter the relative importance of ctenophore competition versus predation affecting fish larvae, but that lower DO decreased fish larval survival and increased the growth rates of the surviving larvae.
15.2.6 Theme 6: Short-Term Forecasting
Wiggert et al. (Chap. 6) discuss the use of their model for short-term forecasting. We do not typically consider now-term forecasting of hypoxia as a pressing issue for management, as it is unclear whether hydrodynamic-based models for hypoxia are accurate enough to be effectively used for short-term forecasts of relatively fine-scale spatial dynamics of biological dynamics that occur over days to weeks. However, Wiggert et al. (Chap. 6) link, at least illustratively, their modeling to harmful algal blooms (HABs) and jellyfish abundance for which near-term forecasts are very useful for beach closings and water quality warnings. They present results from their water quality model imbedded in ROMS, with the coupled models being part of the larger Chesapeake Bay Ecological Prediction System (CBEPS) that can generate now-casts and 3 day forecasts. They illustrate how their output can be post-processed using habitat suitability to identify likely areas of high concentrations of sea nettles, the pathogenic bacterium Vibrio, and harmful algal species. Most HAB models use a statistical approach (e.g., Kim et al. 2014), while there is some effort toward using 3-D hydrodynamic-water quality models similar to hypoxia models (Andersen et al. 2015). The occurrence of HABs and hypoxic conditions shares many of the same environmental drivers (e.g., circulation and high nutrients) (O’Neil et al. 2012; Watson et al. 2016), and thus, coupled hydrodynamics-water quality models can play a role, with some modification, for simulating the timing and magnitude of HABS and effectiveness of management actions (see Paerl et al. 2016). HAB species can either be added to the models or, as illustrated by Wiggert et al. (Chap. 6), the models can be used to generate the environmental conditions that are then post-processed for possible habitat “hot spots.”
15.2.7 Theme 7: Possible Futures
OMZs and coastal hypoxia are both highly susceptible to climate change (Grantham et al. 2004; Rabalais et al. 2009; Altieri and Gedan 2015), and global climate change is expected to increase hypoxia in both shelf (OMZs) and coastal systems (Voss et al. 2013). OMZs can be used to understand and track biogeochemical cycling in the ocean and as an indicator of ocean health (Paulmier and Ruiz-Pino 2009). Because the management actions for reducing nutrient loadings in coastal systems are costly and require time to implement, and also because biological responses of upper trophic levels may involve delays, projections of how management actions may affect hypoxia cannot be made without knowing both present-day and anticipated future conditions (Justic et al. 2007). Justification for the investment involves ensuring that the benefits will be sufficiently large now and also into the future. Thus, scenarios of possible future conditions are needed and these should reflect both anticipated changes locally (e.g., land use) and regionally (climate change).
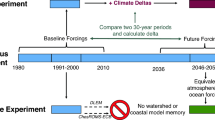
Lehrter et al. (Chap. 8) simulated a future scenario with a 3-D hydrodynamics model coupled to a NPZ-type model for 2006 conditions that was designed to reflect global climate change. They imposed on the 2006 simulation a 3 °C warmer air temperature, a 10% increase in river discharge, and adjusted ocean transport at the east, south, and west boundaries based on a broader-scale regional model itself run under the climate change conditions. Climate change was predicted to cause stronger stratification that leads to more hypoxia during the initial onset and generally lower DO concentrations where hypoxia occurred. They note some of the many factors that could be affected by climate change that were not accounted for in their climate change scenario: changes in hydrology, coastal winds, phytoplankton community structure, and the nutrient concentrations in the rivers.
Altieri and Gedan (2015) present a conceptual model of how the climate drivers (cloud cover, winds) can affect physical (e.g., stratification) and biological (e.g., primary productivity) factors that, in turn, would affect hypoxia. Justic et al. (1996) demonstrated how climate change could be incorporated into projections of hypoxia using a 2-box model; very telling is that 20 years later it is not clear that if we repeated their analyses now we could significantly reduce the uncertainties they faced in implementing a climate change scenario. Some progress is illustrated with the use of downscaled regional and GCM models and an ensemble approach for the hypoxia models with the well-studied Baltic Sea (Meier et al. 2011). Uncertainties remain about how to downscale from global and regional models to 100 m scales for use in hydrological and ecological models (e.g., Flint and Flint 2012) and also about the direction of changes in some key variables (e.g., precipitation, see Trenberth 2011). Acidification will also need to be considered in future scenarios because acidification and hypoxia affect each other in shelf and coastal ecosystems (Melzner et al. 2013; Miller et al. 2016; Laurent et al. 2017). Ocean warming will “very likely” lead to further declines in DO; however, in an update to the recent IPCC’s Fifth Assessment Report (AR5), it was noted that the uncertainty about present-day conditions caused the assessment to determine it “as likely as it is unlikely” that hypoxic and subhypoxic zones will increase (Howes et al. 2015). Thus, projecting hypoxia into the future remains a challenge.
15.2.8 Theme 8: Ecological Effects of Hypoxia
While there has been some progress in linking the models for simulating physics and hypoxia to the models that simulate the response of the biota, significant gaps still remain. One critical determinant of exposure of biota to low DO is their movement, including their avoidance behavior. LaBone et al. (Chap. 10) used the particle-tracking bookkeeping in FVCOM for the Gulf of Mexico (Justic and Wang 2014) to simulate how individual fish would avoid low DO conditions. They performed 7-day simulations and with a collection of individuals (hundreds) not directly scalable to the population level. They show that exposure to lethal and sublethal DO concentrations is not greatly affected by the movement algorithm used for non-avoidance (default) movement behavior. Expressing the effects of hypoxia as the percent of an arbitrary number of total individuals is helpful for comparing effects on a relative basis but does not lend itself to easy use for management. The Lagrangian approach operating within the same grid as the hydrodynamics-water quality model allows for direct simulation of movement as water quality conditions change on the scales represented in the hydrodynamics (e.g., Ibarra et al. 2014). This approach can be expanded to simulate growth, mortality, and reproduction of individuals for a summer, year, or multiple years and using techniques such as superindividuals that allow scaling to large number populations (e.g., Rose et al. 2015b). Getting to the population or system level (e.g., an estuary, Gulf of Mexico) is critical for management so that long-term effects can be simulated or inferred and the predictions are the same biological scale as the resources are managed.
Two dominant approaches for simulating the system-level responses to hypoxia are illustrated in this book. Adamack et al. (Chap. 12) illustrate the approach of simulating population-level responses by imbedding the growth, mortality, reproduction, and movement of individual bay anchovy (using a superindividual approach) directly into the 3-D physics-water quality model for the Chesapeake Bay. The individual or agent-based approach has become very popular for simulating fish and other organisms (Grimm and Railsback 2013; DeAngelis and Grimm 2014). Several other models in this book also used the individual-based approach (Kolesar et al. Chap. 11, Rose et al. Chap. 13).
Adamack et al. simulated 10 years that matched the historical pattern of dry, normal, and wet years by stringing together years from a pool of hydrodynamics-water quality simulations. They assumed a recruitment of young anchovy each year entered the model grid and showed that changes in nutrient loadings had major effects on the population dynamics whether recruitment was assumed to be high or low each year. To accommodate possible low DO effects on prerecruit stages and increased overlap of juveniles and adults with predators, they determined how much recruitment would need to be reduced by hypoxia (higher egg mortality) or how much more predation on juveniles and adults would be needed to offset the benefits of more food under increased nutrient loadings. The magnitude of the increases needed in prerecruit mortality or more intense predation was deemed within the variability observed in the system and therefore ecologically feasible.
De Mutsert et al. (Chap. 14) demonstrate the alternative approach (i.e., Eulerian) and how the response of the entire upper-level food web can be simulated using a modified version of the popular EwE software, specifically by developing an Ecospace model that allows for a 2-D spatial grid and the inputting of environmental variables that can vary in time and space. A major modification was the specification of a new habitat capacity effect whereby multiple environmental variables (including DO) can be used to reduce the foraging area of the predators.
A major advantage of a Lagrangian approach for examining hypoxia effects is that it is easier to simulate movement, and especially avoidance behavior, and has the capability to allow for the accumulation of exposures of individuals over time. This is more difficult to formulate for the Eulerian approach that underlies Ecospace (biomass is exchanged among spatial cells). How to include avoidance in Eulerian models is challenging, and the history of individuals is not tracked, and thus, exposure is necessarily based on biomass in that location for that time step only. However, the bookkeeping involved with using an individual-based approach for large number of populations (e.g., use of superindividuals) requires some effort and custom coding, especially when the individuals are simulated, as with Adamack et al. (Chap. 12), within the same 3-D grid as the physics model.
More importantly, the individual-based approach is limited to simulating a few species, while the Eulerian approach of Ecospace allows for many species, and thus, the entire food web can be represented. There is a rich history of simulating population dynamics of well-studied fish species that use readily available data on growth, mortality, and reproduction, but then, the food web effects need to be represented implicitly (i.e., forced by changes in parameter values). Rose et al. (2009) suggested that indirect effects could be critical for simulating hypoxia effects on key populations, and representing the entire food web can be critical in some situations to minimize the chances of missing possible complicated indirect effects mediated through food web competition and predator–prey interactions. The food web approach illustrated by Ecospace has a clear advantage over the individual-based, multi-species approach for assessing possible food web-mediated indirect effects. De Mutsert et al. (Chap. 14) show with 1950–2010 simulations (monthly time step) of the Louisiana shelf ecosystem with and without hypoxia and food effects (chlorophyll) included that the positive effects of increased food as a result of increased nutrient loadings outweigh the negative effects on biomass of more extensive hypoxia. One comparison showed that there were higher average biomasses of key fish groups with enrichment and hypoxia than with no enrichment and no hypoxia, and another comparison (ignoring a food effect) showed that biomasses with hypoxia were lower in the hypoxia area but were not consistently lower compared to no hypoxia when viewed system-wide. However, specification of the many possible predator–prey interactions in food web models remains a challenge (Ainsworth et al. 2010).
The simulation of DO will not, within foreseeable future, get to a fine enough scale for explicitly representing the effects on individual fish (e.g., meters and minutes for direct mortality) so implicit approaches for representing fine-scale variability in DO are needed. Measurement methods can provide detailed DO data for short periods of time and are not comprehensive for the grid but can be sufficient to characterize fine-scale variability (e.g., Zhang et al. 2014). How to switch from explicit representation of DO fields to the variability expected within each of the spatial cells is a challenge. There may be approaches that can be borrowed from downscaling methods of broadscale models to finer-scale models (e.g., Tabor and Williams 2010; Flint and Flint 2012).
With coastal hypoxia, an added complication is the need to also deal with changes in food that are concomitant with hypoxia for the upper trophic levels (Breitburg et al. 2009). Reduced nutrient loadings involve weighing the costs of less food against the benefits of reduced hypoxia. At present, there is not an obvious optimal way to simulate physics, water quality, prey dynamics in response to nutrient changes, and upper tropic level dynamics in a single integrated model. De Mutsert et al. (Chap. 14) and Adamack et al. (Chap. 12) offer progress toward that goal. Several ongoing efforts are striving to achieve such an end-to-end solution, and trying different approaches is a good strategy. In order to ensure the results of the efforts can be compared, and thus results maximally leveraged, a coordinated approach should be part of the modeling efforts to more effectively link hypoxia to population and the food web dynamics.
15.3 Concluding Remarks
Modeling the dynamics and causes of hypoxia has greatly progressed to the point that models can simulate seasonal dynamics over scales of a few kilometers, but numerical description of the effects of hypoxia on biota at the population and higher levels is still in the formative stage. The models presented in this book should be considered examples of the current state of hypoxia modeling, but are not a true representative sample of all hypoxia modeling and thus this chapter cannot be considered a comprehensive review. When viewed together, however, the chapters highlight some areas of modeling strengths and also some critical uncertainties that suggest areas for future research efforts. The existing models coupling physics and water quality can simulate seasonal hypoxia on kilometer scales quite well, and they now cover the major coastal systems, OMZs, and many shallow estuarine subsystems. Increased computing power in the future will allow for better quantification of the uncertainty with model predictions. The limitations include uncertain specification of boundary and forcing functions (e.g., wind), challenges in representing the sediment-water exchanges and multiple nutrient limitation, and the limited availability of data for multiple contrasting years for calibration and validation. To increasingly utilize these models for practical applications toward restoration goals, we need to ensure that the water quality modeling is capable of accurately predicting responses to changed conditions (nutrient loadings and climate change) and that the model has sufficient skill in the vertical as well as horizontal dimensions.
A major challenge remains to effectively link the water quality to the upper trophic levels. A variety of approaches were illustrated in this book. These included individual-based modeling focused on a specific process (avoidance affects exposure), simulation of population dynamics over multiple years imbedded in the 3-D water quality, individual-based modeling focused on a few species and life stages (fish larvae and ctenophores) in 3 vertical layers, and a Eulerian representation of the full food web in 2-D. Data for calibration and testing of the upper trophic level models are much more limited than for water quality and, except for some special studies, are collected for other reasons than quantifying hypoxia effects. There will be increasing demands that the population and system responses of biota to hypoxia be predicted in order to quantify the ecological benefits and costs of changes in nutrient loadings (management of coastal systems) and to express the effects of ocean management and climate change in terms of direct relevance to managers and the public.
References
Ainsworth CH, Kaplan IC, Levin PS, Mangel M (2010) A statistical approach for estimating fish diet compositions from multiple data sources: Gulf of California case study. Ecol Appl 20:2188–2202
Altieri AH, Gedan KB (2015) Climate change and dead zones. Glob Change Biol 21:1395–1406
Anderson CR, Moore SK, Tomlinson MC, Silke J, Cusack CK (2015) Living with harmful algal blooms in a changing world: strategies for modeling and mitigating their effects in coastal marine ecosystems. Coastal and marine hazards, risks, and disasters. Elsevier BV, Amsterdam, pp 495–561
Ayata SD, Lévy M, Aumont O, Sciandra A, Sainte-Marie J, Tagliabue A, Bernard O (2013) Phytoplankton growth formulation in marine ecosystem models: should we take into account photo-acclimation and variable stoichiometry in oligotrophic areas? J Mar Syst 125:29–40
Bestley S, Jonsen I, Harcourt RG, Hindell MA, Gales NJ (2016) Putting the behavior into animal movement modeling: improved activity budgets from use of ancillary tag information. Ecol Evol 6:8243–8255
Blumberg AF, Kantha LH (1985) Open boundary condition for circulation models. J Hydraul Eng 111:237–255
Bonachela JA, Klausmeier CA, Edwards KF, Litchman E, Levin SA (2015) The role of phytoplankton diversity in the emergent oceanic stoichiometry. J Plankton Res p fbv087
Breitburg DL, Hondorp DW, Davias LA, Diaz RJ (2009) Hypoxia, nitrogen, and fisheries: integrating effects across local and global landscapes. Ann Rev Mar Sci 1:329–349
Chan F, Barth JA, Lubchenco J, Kirincich A, Weeks H, Peterson WT, Menge BA (2008) Emergence of anoxia in the California Current large marine ecosystem. Science 319:920
Chesney EJ, Baltz DM (2001) The effects of hypoxia on the northern Gulf of Mexico coastal ecosystem: a fisheries perspective. In: Rabalais NN, Turner RE (eds) Coastal hypoxia: consequences for living resources and ecosystems. American Geophysical Union, Washington, DC, pp 321–354
Cohen JH, Forward RB (2009) Zooplankton diel vertical migration—a review of proximate control Oceanog. Mar Biol Annu Rev 47:77–109
DeAngelis DL, Grimm V (2014) Individual-based models in ecology after four decades. F1000 prime reports 2014, 6:39. doi:10.12703/P6-39
Denman KL (2003) Modelling planktonic ecosystems: parameterizing complexity. Prog Oceanogr 57:429–452
Diaz RJ, Rosenberg R (2008) Spreading dead zones and consequences for marine ecosystems. Science 32:926–929
Fennel K, Laurent A, Hetland R, Justić D, Ko DS, Lehrter J, Murrell M, Wang L, Yu L, Zhang W (2016) Effects of model physics on hypoxia simulations for the northern Gulf of Mexico: a model intercomparison. J Geophys Res Oceans 121. doi:10.1002/2015JC011577
Fennel K, Hu J, Laurent A, Marta-Almeida M, Hetland R (2013) Sensitivity of hypoxia predictions for the northern Gulf of Mexico to sediment oxygen consumption and model nesting. J Geophys Res 118:990–1002
Flint LE, Flint AL (2012) Downscaling future climate scenarios to fine scales for hydrologic and ecological modeling and analysis. Ecol Proces 1:2
Flynn KJ (2003) Modelling multi-nutrient interactions in phytoplankton; balancing simplicity and realism. Prog Oceanogr 56:249–279
Friedrichs MA, Dusenberry JA, Anderson LA, Armstrong RA, Chai F, Christian JR, Doney SC, Dunne J, Fujii M, Hood R, McGillicuddy DJ, Moore JK, Schartau M, Spitz YH, Wiggert JD (2007) Assessment of skill and portability in regional marine biogeochemical models: role of multiple planktonic groups. J Geophys Res Oceans 112(C8)
Glibert PM, Kana TM, Brown K (2013) From limitation to excess: the consequences of substrate excess and stoichiometry for phytoplankton physiology, trophodynamics and biogeochemistry, and the implications for modeling. J Mar Syst 125:14–28
Grantham BA, Chan F, Nielsen KJ, Fox DS, Barth JA, Huyer A, Lubchenco J, Menge BA (2004) Upwelling-driven nearshore hypoxia signals ecosystem and oceanographic changes in the northeast Pacific. Nature 429:749–754
Grimm V, Railsback SF (2013) Individual-based modeling and ecology. Princeton University Press
Gutowsky LF, Harrison PM, Martins EG, Leake A, Patterson DA, Power M, Cooke SJ (2013) Diel vertical migration hypotheses explain size-dependent behaviour in a freshwater piscivore. Anim Behav 86:365–373
Heip CHR, Goosen NK, Herman PMJ, Kromkamp J, Middelburg JJ, Soetaert K (1995) Production and consumption of biological particles in temperate tidal estuaries. In: Ansell AD, Gibson RN, Barnes M (eds) Oceanography and marine biology: an annual review, vol 33. University College London Press, pp 1–149
Hetland RD (2017) Suppression of baroclinic instabilities in buoyancy-driven flow over sloping bathymetry. J Phys Oceanogr 47:49–68
Hetland RD, DiMarco SF (2008) How does the character of oxygen demand control the structure of hypoxia on the Texas-Louisiana continental shelf? J Mar Syst 70:49–62
Hetland RD, DiMarco SF (2012) Skill assessment of a hydrodynamic model of circulation over the Texas-Louisiana continental shelf. Ocean Model 43:64–76
Holt J, Allen JI, Anderson TR, Brewin R, Butenschön M, Harle J, Huse G, Lehodey P, Lindemann C, Memery L, Salihoglu B (2014) Challenges in integrative approaches to modelling the marine ecosystems of the North Atlantic: physics to fish and coasts to ocean. Prog Oceanogr 129:285–313
Howarth RW (1988) Nutrient limitation of net primary production in marine ecosystems. Annu Rev Ecol Syst 19:89–110
Howes EL, Joos F, Eakin M, Gattuso JP (2015) An updated synthesis of the observed and projected impacts of climate change on the chemical, physical and biological processes in the oceans. Front Mar Sci 2:36. doi:10.3389/fmars.2015.00036
Ibarra D, Fennel K, Cullen J (2014) Coupling 3-D Eulerian bio-physics (ROMS) with individual-based shellfish ecophysiology (SHELL-E): a hybrid model for carrying capacity and environmental impacts of bivalve aquaculture. Ecol Model 273:63–78
Justic D, Wang L (2014) Assessing temporal and spatial variability of hypoxia over the inner Louisiana-upper Texas shelf: application of an unstructured-grid three-dimensional coupled hydrodynamic-water quality model. Cont Shelf Res 72:163–179
Justić D, Bierman VJ, Scavia D, Hetland RD (2007) Forecasting Gulf’s hypoxia: the next 50 years? Estuaries Coasts 30:791–801
Justic D, Rabalais NN, Turner RE (1996) Effects of climate change on hypoxia in coastal waters: a doubled CO2 scenario for the northern Gulf of Mexico. Limnol Oceanogr 41:992–1003
Kemp WM, Sampou PA, Garber J, Tuttle J, Boynton WR (1992) Seasonal depletion of oxygen from bottom waters of Chesapeake Bay: roles of benthic and planktonic respiration and physical exchange processes. Mar Ecol Prog Ser 85:137–152
Kim DK, Zhang W, Watson S, Arhonditsis GB (2014) A commentary on the modelling of the causal linkages among nutrient loading, harmful algal blooms, and hypoxia patterns in Lake Erie. J Great Lakes Res 40:117–129
Kirtman BP, Bitz C, Bryan F, Collins W, Dennis J, Hearn N, Kinter JL, Loft R, Rousset C, Siqueira L, Stan C (2012) Impact of ocean model resolution on CCSM climate simulations. Clim Dyn 39:1303–1328
LaBone E (2016) Modeling the effects of hypoxia on fish movement in the Gulf of Mexico hypoxic zone. PhD dissertation, Louisiana State University, Baton Rouge
Laurent A, Fennel Cai W-J, Huang W-J, Barbero L, Wanninkhof R (2017) Eutrophication-induced acidification of coastal waters in the northern Gulf of Mexico: insights into origin and processes from a coupled physical-biogeochemical model. Geophys Res Lett 44. doi:10.1002/2016GL071881
Lévy M, Ferrari R, Franks PJ, Martin AP, Rivière P (2012) Bringing physics to life at the submesoscale. Geophys Res Lett 39:L14602. doi:10.1029/2012GL052756
Lehrter JC, Beddick DL, Devereux R, Yates DF, Murrell MC (2012) Sediment-water fluxes of dissolved inorganic carbon, O2, nutrients, and N2 from the hypoxic region of the Louisiana continental shelf. Biogeochemistry 109:233–252
Levin LA, Breitburg DL (2015) Linking coasts and seas to address ocean deoxygenation. Nat Clim Change 5:401–403
Li Y, Li M, Kemp WM (2015) A budget analysis of bottom-water dissolved oxygen in Chesapeake Bay. Estuaries Coasts 38:2132–2148
Litchman E, Klausmeier CA, Miller JR, Schofield OM, Falkowski PG (2006) Multi-nutrient, multi-group model of present and future oceanic phytoplankton communities. Biogeosci Discuss 3:607–663
Mahadevan A (2016) The impact of submesoscale physics on primary productivity of plankton. Ann Rev Mar Sci 8:161–184
Marta-Almeida M, Hetland RD, Zhang X (2013) Evaluation of model nesting performance on the Texas-Louisiana continental shelf. J Geophys Res Oceans 118:2476–2491. doi:10.1002/jgrc.20163
Mattern JP, Fennel K, Dowd M (2013) Sensitivity and uncertainty analysis of model hypoxia estimates for the Texas-Louisiana shelf. J Geophys Res Oceans 118:1316–1332
McClintock BT, Russell DJ, Matthiopoulos J, King R (2013) Combining individual animal movement and ancillary biotelemetry data to investigate population-level activity budgets. Ecology 94:838–849
Meier HM, Andersson HC, Eilola K, Gustafsson BG, Kuznetsov I, Müller-Karulis B, Neumann T, Savchuk OP (2011) Hypoxia in future climates: a model ensemble study for the Baltic Sea. Geophys Res Lett 38:L24608. doi:10.1029/2011GL049929
Melzner F, Thomsen J, Koeve W, Oschlies A, Gutowska MA, Bange HW, Hansen HP, Körtzinger A (2013) Future ocean acidification will be amplified by hypoxia in coastal habitats. Mar Biol 160:1875–1888
Middelburg JJ, Levin LA (2009) Coastal hypoxia and sediment biogeochemistry. Biogeosciences 6:1273–1293
Miller SH, Breitburg DL, Burrell RB, Keppel AG (2016) Acidification increases sensitivity to hypoxia in important forage fishes. Mar Ecol Prog Ser 549:1–8
Monteiro PM, Dewitte B, Scranton MI, Paulmier A, Van der Plas AK (2011) The role of open ocean boundary forcing on seasonal to decadal-scale variability and long-term change of natural shelf hypoxia. Environ Res Lett 6. doi:10.1088/1748-9326/6/2/025002
Moore CM, Mills MM, Arrigo KR, Berman-Frank I, Bopp L, Boyd PW, Galbraith ED, Geider RJ, Guieu C, Jaccard SL, Jickells TD (2013) Processes and patterns of oceanic nutrient limitation. Nat Geosci 6:701–710
Obenour DR, Scavia D, Rabalais NN, Turner RE, Michalak AM (2013) Retrospective analysis of midsummer hypoxic area and volume in the northern Gulf of Mexico, 1985–2011. Environ Sci Technol 47:9808–9815
O’Neil JM, Davis TW, Burford MA, Gobler CJ (2012) The rise of harmful cyanobacteria blooms: the potential roles of eutrophication and climate change. Harmful Algae 14:313–334
Paulmier A, Ruiz-Pino D (2009) Oxygen minimum zones (OMZs) in the modern ocean. Prog Oceanogr 80:113–128
Paerl HW, Gardner WS, Havens KE, Joyner AR, McCarthy MJ, Newell SE, Qin B, Scott JT (2016) Mitigating cyanobacterial harmful algal blooms in aquatic ecosystems impacted by climate change and anthropogenic nutrients. Harmful Algae 54:213–222
Rabalais NN, Turner RE, Diaz RJ, Justic D (2009) Global change and eutrophication of coastal waters. ICES J Mar Sci 66:1528–1537
Reed DC, Algar CK, Huber JA, Dick GJ (2014) Gene-centric approach to integrating environmental genomics and biogeochemical models. Proc Natl Acad Sci 111:1879–1884
Roman MR, Pierson JJ, Kimmel DG, Boicourt WC, Zhang X (2012) Impacts of hypoxia on zooplankton spatial distributions in the northern Gulf of Mexico. Estuaries Coasts 35:1261–1269
Rose KA, Adamack AT, Murphy CA, Sable SE, Kolesar SE, Craig JK, Breitburg DL, Thomas P, Brouwer MH, Cerco CF, Diamond S (2009) Does hypoxia have population-level effects on coastal fish? Musings from the virtual world. J Exp Mar Biol Ecol 381:S188–S203
Rose KA, Sable S, DeAngelis DL, Yurek S, Trexler JC, Graf W, Reed DJ (2015a) Proposed best modeling practices for assessing the effects of ecosystem restoration on fish. Ecol Model 300:12–29
Rose KA, Fiechter J, Curchitser EN, Hedstrom K, Bernal M, Creekmore S, Haynie A, Ito SI, Lluch-Cota S, Megrey BA, Edwards CA (2015b) Demonstration of a fully-coupled end-to-end model for small pelagic fish using sardine and anchovy in the California Current. Prog Oceanogr 138:348–380
Rose KA, Creekmore S, Thomas P, Craig JK, Rahman MS, Neilan RM (in review) Modeling the population effects of hypoxia on Atlantic croaker (Micropogonias undulatus) in the northwestern Gulf of Mexico: part 1—model description and idealized hypoxia. Estuaries Coasts
Scully ME (2013) Physical controls on hypoxia in Chesapeake Bay: a numerical modeling study. J Geophys Res Oceans 118:1239–1256
Shen J, Wang T, Herman J, Mason P, Arnold GL (2008) Hypoxia in a coastal embayment of the Chesapeake Bay: a model diagnostic study of oxygen dynamics. Estuaries Coasts 31:652–663
Sippel T, Eveson JP, Galuardi B, Lam C, Hoyle S, Maunder M, Kleiber P, Carvalho F, Tsontos V, Teo SL, Aires-da-Silva A (2015) Using movement data from electronic tags in fisheries stock assessment: a review of models, technology and experimental design. Fish Res 163:152–160
Soetaert K, Middelburg JJ (2009) Modeling eutrophication and oligotrophication of shallow-water marine systems: the importance of sediments under stratified and well-mixed conditions. Hydrobiologia 629:239–254
Stramma L, Johnson GC, Sprintall J, Mohrholz V (2008) Expanding oxygen-minimum zones in the tropical oceans. Science 320:655–658
Tabor K, Williams JW (2010) Globally downscaled climate projections for assessing the conservation impacts of climate change. Ecol Appl 20:554–565
Testa JM, Brady DC, Di Toro DM, Boynton WR, Cornwell JC, Kemp WM (2013) Sediment flux modeling: Simulating nitrogen, phosphorus, and silica cycles. Estuar Coast Shelf Sci 131:245–263
Thomas LN, Tandon A, Mahadevan A (2008) Submesoscale processes and dynamics. In: Hecht MW, Hasumi H (eds) Ocean modeling in an eddying regime. American Geophysical Union, Washington, DC, pp 17–38. doi:10.1029/177GM04
Thomas P, Rahman MS, Picha ME, Tan W (2015) Impaired gamete production and viability in Atlantic croaker collected throughout the 20,000 km2 hypoxic region in the northern Gulf of Mexico. Mar Pollut Bull 101:182–192
Trenberth KE (2011) Changes in precipitation with climate change. Clim Res 47:123–138
Treseder KK, Balser TC, Bradford MA, Brodie EL, Dubinsky EA, Eviner VT, Hofmockel KS, Lennon JT, Levine UY, MacGregor BJ, Pett-Ridge J (2012) Integrating microbial ecology into ecosystem models: challenges and priorities. Biogeochemistry 109:7–18
Tyler RM, Brady DC, Targett TE (2009) Temporal and spatial dynamics of diel-cycling hypoxia in estuarine tributaries. Estuaries Coasts 32:123–145
Voss M, Bange HW, Dippner JW, Middelburg JJ, Montoya JP, Ward B (2013) The marine nitrogen cycle: recent discoveries, uncertainties and the potential relevance of climate change. Philos Trans R Soc Lond B 368:20130121. doi:10.1098/rstb.2013.0121
Wainwright J, Mulligan M (2005) Modelling and model building. In: Wainwright J, Mulligan M (eds) Environmental modelling: finding simplicity in complexity. Wiley, West Sussex, pp 7–73
Watson SB, Miller C, Arhonditsis G, Boyer GL, Carmichael W, Charlton MN, Confesor R, Depew DC, Höök TO, Ludsin SA, Matisoff G (2016) The re-eutrophication of Lake Erie: harmful algal blooms and hypoxia. Harmful Algae 56:44–66
Yu L, Fennel K, Laurent A (2015) A modeling study of physical controls on hypoxia generation in the northern Gulf of Mexico. J Geophys Res Oceans 120:5019–5039
Zhang H, Mason DM, Stow CA, Adamack AT, Brandt SB, Zhang X, Kimmel DG, Roman MR, Boicourt WC, Ludsin SA (2014) Effects of hypoxia on habitat quality of pelagic planktivorous fishes in the northern Gulf of Mexico. Mar Ecol Prog Ser 505:209–226
Zhang J, Gilbert D, Gooday A, Levin L, Naqvi SWA, Middelburg JJ, Scranton M, Ekau W, Pena A, Dewitte B, Oguz T, Monteiro PMS, Urban E, Rabalais NN, Ittekkot V, Kemp WM, Ulloa O, Elmegen R, Escobar-Briones E, Van der Plas AK (2010) Natural and human-induced hypoxia and consequences for coastal areas: synthesis and future development. Biogeosciences 7:1443–1467
Acknowledgements
Funding for the preparation of this chapter (KAR) was partially provided by the National Oceanic and Atmospheric Administration, Center for Sponsored Coastal Ocean Research (CSCOR), NGOMEX16 grant number NA16NOS4780204 awarded to Louisiana State University. This is publication number 218 of the NOAA’s CSCOR NGOMEX program.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2017 Springer International Publishing AG
About this chapter
Cite this chapter
Rose, K.A., Justic, D., Fennel, K., Hetland, R.D. (2017). Numerical Modeling of Hypoxia and Its Effects: Synthesis and Going Forward. In: Justic, D., Rose, K., Hetland, R., Fennel, K. (eds) Modeling Coastal Hypoxia. Springer, Cham. https://doi.org/10.1007/978-3-319-54571-4_15
Download citation
DOI: https://doi.org/10.1007/978-3-319-54571-4_15
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-54569-1
Online ISBN: 978-3-319-54571-4
eBook Packages: Biomedical and Life SciencesBiomedical and Life Sciences (R0)