
Abstract
This paper presents experimental analysis prospect of using a vibration absorber for possible energy harvesting results. To achieve this goal, a classical pendulum-oscillator system (dedicated to vibration suppression) is modified by adding an electromagnetic harvester device. The electromagnetic energy harvester consists of a two fixed and one levitating magnets. The induced energy results from relative movement between magnet and coil, which produces a voltage in the coil by electromagnetic induction phenomenon. When an external excitation is applied to the harvest-absorber system, the levitating magnet will start to oscillate due to the magnetic repulsion of the two fixed magnets. The main goal of this work is to show induced energy of a pendulum-oscillator system with added harvester device, near the main resonance region. The influence of frequency of excitation and resistance load is shown. Additionally, a mathematical model of magnetic levitating force is proposed.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
1 Overview of Energy Harvesting
Energy harvesting (EH) is commonly referred to as a process where a given amount of ambient energy is transformed into electrical energy. The ambient energy could be the kinetic energy of a moving or vibrating structure (vibrational harvesters), the radiant energy of sunlight (photonic harvesters) or the thermal energy (radial harvesters), of a warm object [6]. The vibrational devices feed off motion produced as a by-product in order to generate power, and so are natural AC power sources. Nowadays, there are several energy harvesting methods that convert mechanical energy into electrical energy. The most popular are: electromagnetic energy harvesters (called induction energy harvesters), piezoelectric energy harvesters, magnetostrictive energy harvesters, and electrostatic energy harvesters.
The magnetic induction harvesters generate power through relative motion between a coil of wire and a magnet [8, 15]. The motion of magnet causes the magnetic flux, which leads to generation of a voltage [11]. The level of recovered energy depends mainly on the size of the system and velocity of magnet. The magnitude of energy harvested can vary from milliwatts up to kilowatts [13].
The piezoelectric harvesters produce a voltage when deformed under an applied stress. The magnitude of recovered energy from piezoelectric systems equal from microwatts to watts [1, 14]. Similarly, a magnetostrictive harvester which is based on properties of magnetostrictive material will produce a magnetic field when deformed. The electrostatic energy harvesters use the vibration of a host structure to vary the capacitance of an initially charged capacitor. This variable capacitor acts like a current source that can power an electrical circuit [2]. Energy electromagnetic harvesters based on magnetic levitation started to be studied in the last time [10], especially due to their mechanical structure simplicity (lack of springs or other mechanical elastic elements of suspension), which ensures a high reliability in work.
Similar to harvest energy process is the suppression vibration phenomenon by dynamic absorbers. Therefore, the combination of energy harvesting and vibration suppression seems very promising. The conception of simultaneous vibration suppression and energy harvesting can be found in the literature. Kecik and Borowiec [7] proposed an autoparametric pendulum system to energy harvesting. They propose the rotatory harvester mounted in the pendulum pivot. Energy harvesting effectiveness due to different kinds of pendulum motion is analyzed. The obtained results show that, the chaotic motion of the pendulum generates highest voltage. Hassaan [5] proposes a novel concept for using the mass-spring vibration absorber as energy harvester, and defines a new frequency depending on the mass ratio of the absorber. Mitura et al. [12] proposed a numerical model of a pendulum system with an added harvester device. The magnetic levitation force is treated as linear spring force. Different kind of the pendulum behavior was studied from energy harvesting point of view. The higher recovered energy is obtained for the chaotic motion.
In this paper, the prospect of using a vibration absorber for possible energy harvesting from low frequency vibrations is presented. The studies are carried out on a special laboratory rig. The influence of the excitation frequency and the resistance load on recovered energy is presented. Additionally, the model of the magnetic levitated force is proposed.
2 Concept of Harvest-Absorber System
2.1 Pendulum Absorber System
The experimental study has been performed on a special laboratory rig at Lublin University of Technology. General view of the experimental apparatus is shown in Fig. 1. The main elements are: a mechanical system consists of the pendulum and the oscillator (vibration suppression device), the electromagnetic harvester with electrical circuit and the control-measured module. The system has three degrees of freedom for the mechanical parts and one for the electrical circuit. The data acquisition and control of the system is realized by platform module DSP module and with the help of camera Phantom Miro120 (for magnet measuring).

General view of the experimental apparatus
The harvest-absorber system (Fig. 2) consists of: the pendulum (absorber, (1)), the oscillator (2) and the levitating magnet of harvester device (3). Inside the pendulum the magnetic harvester consist of three magnets is mounted. The detailed description of harvester is presented in the next section. The pivot of the pendulum is connected with an encoder MHK 40 (4). The oscillator (called main system) can be fitted for required dynamical conditions by changing of mass (5). The spring which connects mass of the oscillator and base is linear. The different spring stiffness can be applied depending on dynamical conditions. The dynamics of the system is investigated for two dampers variants: a classical linear viscous damper (6) which is controlled by a hydraulic valve connected to an oil tank (7), or a nonlinear magnetorheological damper RD1097-01 (8) with a suitable control system.

The oscillator-pendulum system with energy harvester
The motion of the system is realized by mechanism: a motor 1.5 kW (9), an inverter (10), and a special system which changes rotation of the DC into translational motion of the slider (11). The slider is connected to the main system by the linear spring (12), (kinematic excitation). The mounted spring transmitting motion from motor to oscillator is linear. To verify the harmonic motion of excitation, the slider motion was measured by high-speed camera.
2.2 Electromagnetic Induction Device
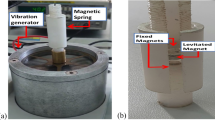
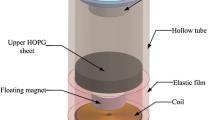
A schematic diagram and a photo of the electromagnetic harvester are presented in Fig. 3. From a functional principle point of view, electromagnetic generator is similar to a shaker, but the conversion process is reversed [4]. The electromagnetic harvester device (Fig. 3a) consists of a circular permanent neodymium magnet NdFeB (1), (known as Neo) with axial direction of magnetization and anticorrosion coat levitating between two fixed magnets. Two permanent neodymium magnets, top (2) and lower (3) are rigidly fixed to the tube and are oriented such that the middle, unfixed magnet levitates in an equilibrium position. The magnets are placed in such way that all of the magnets facing the surface have the same oriented pole (Fig. 2b). The magnets are a type of strong, and are made of an alloy composed of neodym, iron, and boron to form Nd2Fe14B tetragonal structure. This levitating magnet is free to move vertically within the tube (practically no friction). The position of the lower magnet can be regulated (6), and equilibrium position of the middle magnet is possible to set. The harvester housing is made as a cylindrical piece of tubing (4) from plexiglass material. Transparent material of the tube enables observation motion (displacement and velocity) of the magnet by a camera. In order to ensure free motion, the holes in the tube housing are made (to reduce compressed air).

The view of magnetic pendulum harvester system (a) and its scheme (b)
The both fixed magnets are ring shaped with outer diameter of 20 mm and height of 5 mm. At the outside of the pendulum a wire-wound copper coil (5) is wrapped around outside of the inner tube connected to the resistance load. It can be set by the precision potentiometer from the range of 0–10 kΩ.
The circuit dissipates the produced energy across a load resistor and it is not capable of storing energy. The parameter lists of the magnetic harvester device are presented in Table 1.
When an external excitation is applied to the harvest-absorber system, the middle magnet (levitating) will start to oscillate due to the magnetic repulsion of the two fixed magnets, so a voltage is induced and flows through the circuit.
This relative oscillating motion causes a variation magnetic flux inside the coil. Using Faraday’s law the voltage induced in the coil is obtained
where ε is the voltage induced and dϕ is the magnetic flux. The residual flux density for a neodymium magnet is around 1.15 T [9]. This value depends on the separation distance between the magnet and the coil.
The induced voltage strongly depends on the position and velocity of the levitating magnet relative to the coil. Therefore, the current through the coil will depend upon the position and velocity of the magnet.
The relationship between the magnet velocity and current for system with an active pendulum in Fig. 4 is presented. The peak harvest current equals 6 mA, for the magnet velocity 0.15 m/s. In Fig. 4a presents the velocity–current phase, for time period 5 s, while in Fig. 5b, only for one cycle (0.5 s). Note, that this figure shows a magnetic hysteresis.

Experimental results: the levitating magnet velocity versus induced current, for time period 5 s (a) and 0.5 s -one cycle (b). The frequency of excitation 1.9 Hz, the resistance load 1.15 kΩ, the amplitude of kinematic excitation 20 mm

Photo of the levitating magnet (a) and the magnet restoring force F(Δx) (b) plotted as a function of the separation distance between the movable and bottom magnet (Δx)
The numerical model of the laboratory rig is presented by authors in paper [12], where equations of motion (three for the mechanical parts and one for the electrical circuit) are obtained by the Lagrange’s approach. In this model assume that magnetic force is linear function of the magnet’s displacement.
3 Results and Discussion
3.1 Static Analysis of Levitating Magnet
Free vibration test was performed to identify the dynamic properties of the harvester device. The natural frequency of the pendulum was identified to 6.47 rad/s. The viscous damping coefficient equals 0.012 Nms.
In the literature, usually levitation of the magnet is treated as magnet suspended on the linear or nonlinear spring [3]. The simply force-displacement test (Fig. 5a) shows that relationship between static force and displacement exhibits strongly nonlinear behavior, especially for large displacements (Fig. 5b). Only, in the small range of displacement it can be assumed as linear characteristics. This test was done with help of high-speed camera Phantom Miro 120 (with resolution 256 × 1024 pixels). In Fig. 5b, blue points mean experimental results, while the continuous line (red) presents a proposed model of the magnetic force.
We proposed the mathematical model of the magnetic force F(Δx), based on approximation of the experimental data based on power function
where a 1 and a 2 are the estimated parameter from experiment.
Optimal value of a 1 and a 2 can be found by minimization of index W
where n is number of experimental points, F exp , Δx exp are experimental measured restoring force and displacement. In our case the model of magnetic force has a form shown in Fig. 5b.
3.2 Energy Recovery Analysis
The first step of energy harvesting analysis is to find resonance region. The resonance curves are obtained by experimental study of effective power versus the frequency of excitation. In Fig. 6a, b, the resonance responses for the load resistance of 1.15 and 6 kΩ are presented. The amplitude of the excitation was 20 mm. The resonance region where the pendulum executes swings, in both cases, exists in the same range of 1.65–2.05 Hz. The red line corresponds to the nontrivial solution (the oscillator and pendulum oscillates, denoted NT), while the black line indicates semi-trivial solution (only the oscillator vibrates, denoted ST). The black points are experimental results obtained from the laboratory rig.

The power response of the harvest-absorber system for the load resistance 1.15 kΩ (a) and 6 kΩ (b)
The maximal recovered power is observed for pass to nontrivial solution and equals about 24 mW, for the resistance load 1.15 kΩ (Fig. 6a). Interestingly, that swinging of the pendulum recovered higher energy (compared to semi-trivial solution) for the frequency smaller than 1.85 Hz (“effective pendulum region”).
After crossing this value, induced energy is higher, if the pendulum stays in equilibrium. Similar results are observed for 6 kΩ, but the region of “effective pendulum” is smaller. The recovered energy for ST solution increases together with frequency of excitation, especially for the large load resistance (Fig. 6b).
A load resistance circuit is used to experimentally assess the performance of the harvester. The level of damping in the energy harvester can be modified by increasing or decreasing the load resistance. In order to illustrate the energy harvesting consideration, a series of experimental tests have been done. The experimental relationship between the load resistance and response of a nonlinear magnetic harvester is shown in Fig. 7. These results were done in two variants: for ST (Fig. 7a) and NT (Fig. 7b) solutions.

The induced: power, voltage and current displacement versus the load resistance, for the inactive (a) and active (b) pendulum, for frequency 1.9 Hz
The blue line (with triangle markers) means induced voltage, the red line (circle markers) denotes generated current, while the black line denotes (with cross markers) power. The displacement of the pendulum is described by the green line with square markers. Please note that pendulum in Fig. 7a is inactive (stopped in lower equilibrium position). The increase of the load resistance causes growth of voltage up to 12 V (for 10 kΩ), for ST solution (Fig. 7a). The maximal power corresponds to the resonance peak for the load resistance 6 kΩ and yield 17 mW. Note that higher power differs from the literature suggestion, where usually the power peak is located nearly the coil resistance [6].
The next diagram shows similar results, but in this case of an active absorber (Fig. 7b). In this case, maximal induced power is about 7.5 mW, for the resistance load peak of 3 kΩ.
Interestingly, that displacement of the pendulum practically is independent of the resistance load. The pendulum executes swinging with the same amplitude (the green line has identical level).
Comparing the results of Fig. 7a, b we observe that recovered voltage for the semi-trivial solution is much higher, especially for the resistance load higher than 4 kΩ. However, for lower resistances, the pendulum induces higher power.
Note that for high frequency and/or certain values of load resistance, the magnet jumps out of the coil, what can essential influence on energy harvesting.
The exemplary time histories of the harvest-absorber system in Fig. 8 are presented. The harmonic kinematic excitation with amplitude 20 mm and period 0.525 s is shown in Fig. 8a. The angular pendulum displacement in Fig. 8b is presented. The frequency ratio between the pendulum and the excitation is ½. Note that pendulum executes large swings about 65°.

Experimental results: excitation of the oscillator (a), the pendulum (b) displacements, velocity of levitation magnet (c) and recovered current (d), for the frequency 1.9 Hz, the load resistance 1.15 kΩ
The velocity of magnet (Fig. 8c) and induced current (Fig. 8d) shows different motion compared to the pendulum. The magnet shows much more complicated behavior compared to the pendulum. This can be the results of impact in the air cushion and small friction of magnet in the tube.
4 Conclusions
The paper delivers an energy harvesting analysis focused on experimental results. The harvester device based on the levitating magnet inside the vibration absorber (the pendulum), which is attached to the main system (the oscillator). The concept is dedicated to the pendulum swings. This motion usually is dedicated for dynamic absorbers. The analysis was done near the main parametric resonance, where the pendulum cannot stay in the equilibrium point.
If the pendulum executes a swinging, induced power can be lower or higher and the stay in equilibrium depends on the frequency of excitation and the resistance load. The maximal power obtained for frequency 1.65 Hz and load resistance 1.15 kΩ is about 24 mW. However, the analysis of load resistance influences show that maximal induced power exists for 3 kΩ.
If the pendulum stopped in equilibrium, then the highest recovered power was 25 mW for 2.1 Hz. However, the resistance analysis shows that resonance peak is located for 6 kΩ.
For the vibration suppression, the lower frequencies and the load resistances are recommended. In our case, the frequency and the load resistance should be lower than 1.8 Hz and 4 kΩ. The activation of the pendulum influences on the power peak location. Interestingly, that load resistance not influences on the pendulum’s amplitude. The recovered energy strongly depends on the magnet’s velocity.
Additionally, we propose the model of the magnetic force based on power function.
The next step will be the numerical simulations of harvest-absorber system. Additionally, to find the compromise between energy harvesting and vibration suppression is one of the aims.
References
Adhikari, S., Friswell, M.I., Inman, D.J.: Piezoelectric energy harvesting. From broadband random vibrations. Smart Material. Structure 18(11), 115005 (2009)
Basset, P., Galayko, D., Cottone1, F., Guillemet, R., Blokhina, E., Marty, F., Bourouinal, T.: Electrostatic vibration energy harvester with combined effect of electrical nonlinearities and mechanical impact. J. Micromech. Microeng. 24(3) (2014)
Foisal, A.R., Hong, C., Chung, G.S.: Multi-frequency electromagnetic energy harvester using a magnetic spring cantilever. Sens. Actuators A: Phys. 182, 106–113 (2012)
Ghreca, R., Olaru, R.: Harvesting vibration energy by electromagnetic induction. Ann. Univ. Craiova Electr. Eng. 35, 7–12 (2011)
Hassaan, G.A.: Optimal design of a vibration absorber-harvester dynamic system. Int. J. Res. Eng. Technol. 3(6), 325–329 (2014)
Joyce, B.S.: Development of an electromagnetic energy harvester for monitoring wind turbine blades. Ph.D. Thesis, Virginia Polytechnic Institute and State University (2011)
Kecik, K., Borowiec, M.: An autoparametric energy harvester. Eur. Phys. J. Spec. Top. 222(7), 1597–1605 (2013)
Kulkarni, S., Koukharenko, E., Torah, R., Tudor, J., Beeby, S., O’Donnell, T., Roy, S.: 2008, Design, fabrication and test of integrated micro-scale vibration-based electromagnetic generator. Sens. Actuators A Phys. J. 145, 336–342 (2008)
Magcraft, Permanent Magnet Selection and Design Handbook. Vienna, VA (2007)
Mann, B.P., Sims, N.D.: Energy harvesting from the nonlinear oscillations of magnetic levitation. J. Sound Vibr. 319(1–2), 515–530 (2009)
Mitcheson, P.D., Green, T.C., Yeatman, E.M., Holmes, A.S.: Architectures for vibration-driven Micropower Gener. J. Microelectromech. Syst. 13(3), 429–440 (2004)
Mitura, A., Kecik, K., Warminski, J., Jarzyna, W., Lenci, S.: A numerical study of an autoparametric system with electromagnetic energy harvester. In: Proceedings of the ECCOMAS Thematic Conference on Multibody Dynamics 2015, pp. 609–615 (2015)
Sivananda, K.R.: Operational behavior of a doubly-fed, permanent magnet generator for wind turbines. MS Thesis, Massachusetts Institute of Technology (2005)
Sodano, H., Inman, D., Park, G.: Comparison of piezoelectric energy harvesting devices for recharging batteries. J. Intell. Mater. Syst. Struct. 16(10), 799–807 (2005)
Williams, C., Yates, R.: Analysis of a micro-electric generator for microsystems. Sens. Actuators A Phys. J. 52, 8–11 (1996)
Acknowledgments
This work was financially supported under the project of National Science Centre according to decision no. DEC-2013/11/D/ST8/03311.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2016 Springer International Publishing Switzerland
About this paper
Cite this paper
Kecik, K., Mitura, A. (2016). Nonlinear Dynamics of a Vibration Harvest-Absorber System. Experimental Study. In: Awrejcewicz, J. (eds) Dynamical Systems: Modelling. DSTA 2015. Springer Proceedings in Mathematics & Statistics, vol 181. Springer, Cham. https://doi.org/10.1007/978-3-319-42402-6_17
Download citation
DOI: https://doi.org/10.1007/978-3-319-42402-6_17
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-42401-9
Online ISBN: 978-3-319-42402-6
eBook Packages: Mathematics and StatisticsMathematics and Statistics (R0)