
Abstract
We study dynamical properties of a set Λ of trajectories from a small neighbourhood of a non-transversal Poincaré homoclinic orbit. We show that this problem has no univalent solution, as it takes place in the case of a transversal homoclinic orbit. Here different situations are possible, depending on the character of the homoclinic tangency, when Λ is trivial or contains topological (hyperbolic) horseshoes. In this chapter we find certain conditions for existence of both types of dynamics and give a description (in term of the symbolic dynamics) of the corresponding non-trivial hyperbolic subsets from Λ.
Access provided by Autonomous University of Puebla. Download chapter PDF
Similar content being viewed by others

Keywords
These keywords were added by machine and not by the authors. This process is experimental and the keywords may be updated as the learning algorithm improves.
1 Introduction
Homoclinic orbit or Poincaré homoclinic orbit is an orbit that is bi-asymptotic to a saddle periodic trajectory. Thus, any such orbit belongs to the intersection of the invariant stable \({W}^{s}\) and unstable \({W}^{u}\) manifolds of the corresponding periodic orbit. Depending on transversality or non-transversality of the intersection, the homoclinic orbit is called transversal or non-transversal. In the latter case, one says also about homoclinic tangency.
The existence of transversal Poincaré homoclinic orbits is considered as the universal criterium of chaos. The point is that even the set Λ1 of orbits entirely lying in a small neighbourhood of a transversal homoclinic orbit has a non-trivial structure: it contains infinitely (countable) many periodic and homoclinic orbits, continuum of Poisson stable orbits, etc. Nevertheless, the set Λ1 can be described completely in terms of the symbolic dynamics, [33]. Namely, let f be a diffeomorphism having a transversal homoclinic orbit Γ1 to a saddle fixed point O (see Fig. 1). Then the following result, Shilnikov theorem [33], takes place:
-
The set Λ 1 is a locally maximal uniformly hyperbolic invariant set on which a diffeomorphism is topologically conjugate to a subsystem \({\cal B}_2^{\bar k +q}\) of the Bernoulli shift \({\cal B}_2\) with two symbols, where \({\cal B}_2^{\bar k +q}\) is given by the Markov chain of Fig. 1a and \(\bar k, q\) are integers indicated in Fig. 1b.
Evidently, this result covers also the flow case: then one can consider the set Λ1 as an invariant set for the Poincaré map of a local section to the corresponding saddle periodic trajectory. However, if we consider Λ1 as the set of flow orbits, then the result sounds simpler:
-
Λ 1 is topologically equivalent to a suspension over \({\cal B}_2\) .
Note that the notion of suspension over a topological Markov chain was introduced in [3]. It generalizes the standard notation of suspension over a map and is convenient for description of flow dynamics (in particular, for classification of critical sets of Morse–Smale systems [2, 3]).

a The graph of the Markov chain \({\cal B}_2^{\bar k +q}\) related to the symbolic description of Λ1. b A neighbourhood of a transversal homoclinic orbit: \(\bar k\) can be interpreted as a minimal number of iterations of the diffeomorphism under which orbits of Λ1 can stay in U 0; and q is a number of neighbourhoods (small squares) surrounding those points of Γ1 which do not belong to U 0. c Suspensions over \({\cal B}_2^{\bar k +q}\) and \({\cal B}_2\) are equivalent [3]
In the case of homoclinic tangency, the corresponding problem (of a description of the orbit structure near a non-transversal homoclinic orbit) becomes much more complicated. Moreover, it cannot be principally solved namely as the problem of “complete description”, especially when nearby systems are considered. The point is that arbitrarily small smooth perturbations of any system with a (quadratic) homoclinic tangency can lead to the appearance of homoclinic and periodic orbits of any orders of degeneracy, see [17, 18, 20, 22].
One of the problems of such a type, namely, the study of topological and hyperbolic properties of systems with homoclinic tangencies, is the subject of the present chapter. Hyperbolic properties of systems with quadratic homoclinic tangencies were studied first in the paper [5] of N.K. Gavrilov and L.P. Shilnikov and, afterwards, in a series of papers, e.g. [7,8, 11]. See also the special issue [16] devoted to homoclinic tangencies. Homoclinic tangencies of arbitrary finite orders were studied in papers [6, 11] in which the main attention was given to detecting non-trivial hyperbolic subsets. Note also that certain conditions for the existence of topological horseshoes near homoclinic tangencies were established in [26, 29] for two-dimensional dissipative diffeomorphisms.
In this chapter, see also [24], we extend these results to multidimensional diffeomorphisms (not necessarily dissipative) having homoclinic tangencies to saddle periodic orbits with one-dimensional unstable invariant manifolds.
We assume throughout the paper the following set-up. Let f be an \((m+1)\)-dimensional C r-diffeomorphism, \(r\geq 2\), having a hyperbolic fixed point O with multipliers \(\lambda_1,\dots,\lambda_m, \gamma\) such that
We consider the quantity \(\sigma\equiv|\lambda_1||\gamma|\) which is called the saddle value. Our main assumption is \(\sigma\neq 1\) and we consider two different general cases:Footnote 1
-
(1)
the sectionally dissipative case when \(\sigma<1\) and
-
(2)
the sectionally saddle case when \(\sigma>1\).
We assume also that f has a homoclinic orbit Γ0 to O for which m-dimensional stable W s and one-dimensional unstable W u invariant manifolds of O are tangent and this tangency can be arbitrary.
Let U be a small neighbourhood of the contour \({O}\cup\Gamma_0\). It can be represented as a union of a small neighbourhood U 0 of the point O with a number of small neighbourhood of those points of Γ0 which do not belong to U 0, as in Fig. 1b. Let Λ be the set of orbits (of f) entirely lying in U.
Our main problem is the study of both topological and hyperbolic properties of Λ. We will keep the following standard terminology.
Definition 1
We say that
-
(i)
f possesses a \( \textsf{trivial dynamics}\) near Γ0 if \(\Lambda=O\cup \{\Gamma\}\), where \(\{\Gamma\}\) is a set of homoclinic orbits to O;
-
(ii)
f has a \( \textsf{topological horseshoe}\) if Λ contains an f-invariant subset \(\tilde{\Lambda}\) such that \(f|_{\tilde{\Lambda}}\) is topologically semi-conjugate to a subshift of finite type with positive topological entropy;
-
(iii)
f has a \( \textsf{hyperbolic horseshoe}\) if \(\tilde{\Lambda}\) from (ii) is uniformly hyperbolic and a topological conjugacy (instead the semi-conjugacy) takes place.
Let \(M^+\) and M - be a pair of points of Γ0 such that \(M^+\in W^s_{loc}\cap U_0,\;M^-\in W^u_{loc}\cap U_0\). Let \(\Pi^+\) and Π− be sufficiently small neighbourhoods of the points \(M^+\) and M -, respectively, and let \(M^+=f^{q}(M^-)\) for some integer positive q. Denote the map \(f\bigl|{U_0}\) as T 0 and the map \(f^q\bigl|{\Pi^-}\) as T 1 (thus, \(T_1(M^-)=M^+\)). The map T 0 is called the local map, because it is defined in a small neighbourhood of O; while, the map T 1 is called the global map, because it acts along a global piece of the orbit Γ0.
Definition 2
The homoclinic tangency is \( \textsf{isolated}\) if, for some \(\Pi^+\) , the point \(M^+\) is the unique intersection point of \(l_u = T_1(W^u_{loc}\cap\Pi^-)\cap\Pi^+\) and \(W^s_{loc}\) . We say that the (isolated) homoclinic tangency is \( \textsf{one-sided}\) if \(W^s_{loc}\) divides \(\Pi^+\) onto two half-parts and the curve l u belongs as whole to the closure of exactly the one half of \(\Pi^+\) , otherwise, the tangency is called \( \textsf{topological crossing}\) . We say that a one-sided tangency is \( \textsf{from below}\) , if the point M - is not an accumulation point of the curves \(T_0^i(l_u), i=0,1,\dots\) , i.e.
and is \( \textsf{from above}\) otherwise. See Fig. 2 for an illustration. Footnote 2

Homoclinic tangencies. a One-sided “from above”. b One-sided “from below”. c Topological crossing
We need to say that the problem under consideration (on a structure of the set Λ of orbits near a non-transversal homoclinic orbit) is sharply different in many aspects from the corresponding problem (the so-called Poincaré–Birkhoff problem) for the case of transversal homoclinic orbit.
First, it does not allow a single (univalent) answer (like the Shilnikov theorem): we select two very different situations when the set Λ has a trivial structure and when Λ contains infinitely many horseshoes, in a sense of Definition 1.
Second, under the weakest assumptions, related only to geometrical properties of the homoclinic tangency, see Definition 2, we can establish the corresponding classification results for the sectionally dissipative case \(\sigma<1\) (see Theorem 1) or for the two-dimensional case \(\sigma>1\) (which is reduced to the case \(\sigma<1\) for f -1), see Proposition 2. Furthermore, we render concrete the problem by means of additional general assumptions under conditions A, B, C and D in Sect. 3). Conditions A–C define the so-called simple homoclinic tangency and D defines an order of this tangency. Importantly, for simple homoclinic tangencies with \(\sigma>1\), we can establish quite readable classification results, see Theorems 2 and 3. However, for non-simple homoclinic tangencies with \(\sigma>1\), even for quadratic ones, we have no hope for a similar classification; see Sect. 4.1. Instead, it was shown in [6, 24] that, in the case of simple homoclinic tangencies of finite orders, a quite detailed description of non-trivial hyperbolic invariant subsets from Λ can be achieved. We collect the corresponding (hyperbolic) results in Sect. 5, see Theorems 4 and 5 and their specifications: Proposition 5 for the case \(\sigma<1\) and Proposition 6 for the case \(\sigma>1\). By “a quite detailed description”, we mean that for some dense subset of systems with homoclinic tangency this description (given by Theorem 5) becomes complete; we prove this fact in Sect. 5.1, see also Proposition 7.
2 Topological Horseshoes in the Sectionally Dissipative Case
Note, at first, that condition (2) in the sectionally dissipative case (\(\sigma<1\)) can be regarded to a certain criterion of trivial dynamics that the following result shows.
Theorem 1
Let f have a homoclinic tangency to O and \(\sigma<1\) . Then
-
1.
If the tangency satisfies condition (2) (in particular, when the tangency is “from below”), then f possesses the trivial dynamics near Γ 0 .
-
2.
Otherwise, i.e. when condition (2) is not fulfilled (but, again, \(\sigma<1\) ), f has infinitely many topological horseshoes near Γ 0 .
The proof is given in Sect. 6, see also [24]. Note that the two-dimensional case was analysed in [29, 26]. Nevertheless, it is necessary to note that the main geometric idea of the proof is quite simple that Fig. 3 reflects where the corresponding illustrations (in dimension 2) are shown.
Indeed, the problem under consideration allows a geometric interpretations as follows. In \(\Pi^+\) and Π− there exist infinitely many (m + 1-dimensional) disjoint strips \(\sigma_k^0\subset\Pi^+\) and \(\sigma_k^1\subset\Pi^-\), \(k=k_1,k_1+1,\dots\), such that \(\sigma_k^0 =T_0^{-k}(\Pi^-)\cap\Pi^+\) and \(\sigma_k^1 =T_0^{k}(\Pi^+)\cap\Pi^- = T_0^k\sigma_k^0\). Thus, only iterations under f of points from \(\Pi^+\) which belong to the strips \(\sigma_k^0\) can reach Π−. In turn, the image of the strip \(\sigma_k^1\) under the global map T 1 is a horseshoe-shaped figure \(T_1(\sigma_k^1)\subset\Pi^+\) (below we will use term “horseshoe \(T_1(\sigma_k^1)\)” namely in this, geometrical, sense). Therefore, infinitely many first return maps \(T_{k} =T_1T_0^k:\sigma_k^0\rightarrow\Pi^+\), \(k=\bar k, \bar k +1,\) are defined here. If the tangency is “from below” all these maps possess a trivial dynamics, see Fig. 3a. However, in the case of tangency “from above” (or topological crossing), all these maps act, topologically, as Smale horseshoe maps, see Fig. 3b. Therefore, we can say, in the latter case, about existence of infinitely many geometrical Smale horseshoes.

The strips \(\sigma_k^0\) and \(\sigma_k^1\) are posed on the distances of order \(\gamma^{-k}\) from \(W^s_{loc}\) and \(\lambda_1^k\) from \(W^u_{loc}\), respectively. By a geometry of the tangency, the image of \(\sigma_k^1\) under the global map T 1 is a horseshoe \(T_1(\sigma_k^1)\) whose top is posed on a distance \(\sim\lambda_1^k\) from \(W^s_{loc}\). Since \(\lambda_1^k\ll\gamma^{-k}\), we have: a \(T_1(\sigma_k^1)\cap\sigma_k^0 =\emptyset\) in the case of tangency “from below”. b The return map \(T_k\equiv T_1T_0^k:\sigma_k^0\to\Pi^+\) is similar to a Smale horseshoe map in the case of tangency “from above”
Although within the hypothesis of Theorem 1 we can not say directly on hyperbolic properties of these topological horseshoes, one can apply some indirect facts, like the Katok theorem [30], in order to deduce the following.
Proposition 1
In the case 2 of Theorem 1 the set Λ contains infinitely many hyperbolic horseshoes in sense of Definition 1. Footnote 3
Indeed, by Theorem 1, we get that the restriction to each topological horseshoe has positive topological entropy. The latter means that there are some orbits with positive first Lyapunov exponent. These orbits have other Lyapunov exponents to be negative, due to the sectional dissipation that implies the absence of such orbits having zero second Lyapunov exponent.Footnote 4

Geometry of strips and horseshoes in the case \(\sigma>1\)
Thus, in the sectionally dissipative case, relation (2) provides the necessary condition for the existence of trivial dynamics near a homoclinic tangency. It is not the case when \(\sigma>1\). In particular, we can see principal differences in geometry between the cases \(\sigma<1\) and \(\sigma>1\) even in dimension two (compare Figs. 3 and 4). However, Theorem 1 can be directly applied to this 2dim case for \(\sigma>1\), since we can here consider f -1 instead f. Then the following condition
where the curve \(l_s\subset\Pi^-\) is defined as \(l_s = T_1^{-1}(W^s_{loc}\cap\Pi^+)\cap\Pi^-\), plays role of the condition(2). Thus, we obtain
Proposition 2
Let f be two-dimensional and \(\sigma>1\) . Then
-
1)
If condition (3) holds, then f possesses a trivial dynamics near Γ 0 .
-
2)
Otherwise, i.e. when (3) is not valid (but, again, \(\sigma>1\) ), then f has infinitely many topological horseshoes near Γ 0 every of which contains a hyperbolic horseshoe in sense of Definition 1.
Unfortunately, this approach is not suitable for multidimensional case with \(\sigma>1\) since \(\text{dim}\;W^u(O)>1\) for f -1 and it is not the case under consideration. Moreover, as we will see below, in this case we need, by necessity, an additional specification of the homoclinic tangency, since only geometrical properties are not sufficient even for deriving certain classification results like Theorem 1. However, an analogous specification is required especially (even for the case \(\sigma<1\)), if we want to know more. question relates to hyperbolic properties. Indeed, the hyperbolic horseshoes from Corollary 1 are not specified. We do not know whether the first return maps \(T_1T_0^i: \sigma_i^0\to\sigma_i^0\) are hyperbolic. In order to get more information, we need to make more assumptions (see conditions A–D below).
3 The Definition of a Simple Homoclinic Tangency
Let the multipliers \(\lambda_1,\dots,\lambda_m,\gamma\) of O are ordered as in (1). We call leading (or weak) those multipliers that are equal to \(|\lambda_1|\) by the absolute value. Accordingly, the other stable multipliers (less than \(|\lambda_1|\) by modulus) are called non-leading (or strong stable). We consider the following general condition:
-
A)
the leading stable multipliers of O are simple.
Accordingly, two different types of saddle fixed (periodic) points are defined. Namely,
-
A1)
the point O is a saddle, i.e. the multiplier λ1 is real and \(|\lambda_1|>|\lambda_j|\) for \(j=2,\dots,m\);
-
A2)
the point O is a saddle-focus, i.e. λ1 and λ2 are complex conjugate, \(\lambda_1 =\lambda e^{i\psi}, \lambda_2 = \lambda e^{-i\psi}\), \(0<\lambda<1, 0<\psi<\pi\) and \(\lambda> |\lambda_j|\) for \(j=3,\dots,m\).
When the point O has also non-leading stable multipliers we need more assumptions related to the homoclinic tangency. Recall some necessary facts.
First, if Condition A holds, the manifold \(W^{s}_{loc}(O)\) contains a C r-smooth strong stable manifold \(W^{ss}_{loc}\) which touches at O the eigenspace of Df corresponding to the non-leading multipliers λ i (thus, the \(W^{ss}_{loc}\) has dimension \((m-1)\) or \((m-2)\) when, respectively, A1 or A2 holds). Moreover, it is well-known (see e.g. [25, 34]) that \(W^s_{loc}\) is foliated by the C r strong stable foliation F ss containing \(W^{ss}_{loc}\) as the leaf.
Note also that the manifold \(W^{u}(O)\) is a part of the so-called extended unstable manifold \(W^{ue}(O)\) (see, for example, [25, 34]). It is a smooth (at least \(C^{1+\epsilon}\)) invariant manifold which is tangent, at O, to the eigenspace of Df corresponding to the unstable and the leading stable multipliers, thus, W ue is two- or three-dimensional if O is a saddle or a saddle focus, respectively. Although, the manifold W ue is not defined uniquely, any two such manifolds contain \(W^u_{loc}\) and are tangent to each other at the points of \(W^u_{loc}\). Thus, at the homoclinic point \(M^-\in W^u_{loc}\) the tangent space to W ue, denoted as \({\cal T}_{M^-}W^{ue}\) is defined uniquely. Since \(M^+=T_1(M^-)\), we can extend W ue up to the homoclinic point \(M^+\). Denote the tangent space to W ue at \(M^+\) as \({\cal T}_{M^+}W^{ue}\). Evidently, \({\cal T}_{M^+}W^{ue} =DT_1\left({\cal T}_{M^-}W^{ue})\right)\), where DT 1 denotes the differential of the global map \(T_1\equiv f^q:\Pi^-\to\Pi^+\) at the point M -.
We introduce the following general conditions: the off strong stable manifold condition
-
B)
\(M^+\notin W^{ss}_{loc}\)
and subtransversality condition
-
C)
\({\cal T}_{M^+}W^{ue}\) is transversal to \(F^{ss}(M^+)\) at \(M^+\), where \(F^{ss}(M^+)\) is the leaf of the foliation F ss containing the point \(M^+\).

Examples of three-dimensional diffeomorphisms with simple (a), and non-simple (b)–(c) homoclinic tangencies
An example of three-dimensional diffeomorphism satisfying the conditions A1, B and C is shown in Fig. 5a. Main cases where C is violated (while A1 and B are kept) are illustrated in Fig. 5b and c. Here, either \({\cal T}_{M^+}W^{ue}\) is transversal to \(W^s_{loc}\) but touches \(F^{ss}(M^+)\) at \(M^+\), as in case (b), or \({\cal T}_{M^+}W^{ue}\) belongs to \(W^s_{loc}\) (i.e., any surface \(T_1(W^{ue})\) touches \(W^s_{loc}\) at \(M^+\)), as in case (c).
Definition 3
A homoclinic tangency satisfying conditions A–C is called \( \textsf{simple}\).
We can also adapt this definition to homoclinic tangencies of finite orders as follows.
Definition 4
Let f be a C r-diffeomorphism under consideration and n be an integer such that \(2\leq n\leq r\). Then we say that the homoclinic tangency at \(M^+\) is of \( \textsf{order}\) n if there exists local (near \(M^+\)) C r-coordinates \((\xi_1,\dots,\xi_m,\eta)\) in which \(W^s_{loc}\) has the equation \(\eta=0\) and a piece of W u containing \(M^+\) can be written (in the parameter form) as follows
where \(g(\alpha)\) is C r and
where α is a parameter varying near zero, b i and d are constants and \(\sum |b_i|\neq 0\). If all derivatives \(d^{i} g(0)/d \alpha^{i}\) vanish for \(i=0,\dots, s\), where \(s\geq r\), then we say that the tangency is \( \textsf{of indefinite order}\).
By definition, tangencies of even orders are one-sided, while, tangencies of odd orders correspond to the topological crossings. Tangencies of some small orders have special notations: quadratic for n = 2, cubic for n = 3, quadric for n = 4. Note that a type of the tangency can depend on coordinate changes. For instance, even a quadratic tangency can be transformed into a tangency of indefinite order under C 1-change of coordinates.Footnote 5
We introduce the following condition:
D) the manifolds \(W^s(O)\) and \(W^u(O)\) have the tangency of a finite order \(n \geq 2\) at the homoclinic point \(M^+\).
Since f is diffeomorphism, condition D implies that \(W^s(O)\) and \(W^u(O)\) have tangency of order n at any point of Γ0. Note that, in the real analytical case, the condition D holds always in that sense that any possible homoclinic tangency can be only of finite order here (except for infinitely degenerate cases when \(W^s(O)\) and \(W^u(O)\) coincide).
By Definition 3, a homoclinic tangency satisfying conditions A–D should be labeled as simple homoclinic tangency of order \(n\). Note that notation of simple quadratic homoclinic tangency was introduced in [19] which is, in fact, a certain variant of the so-called quasi-transversal homoclinic intersection, [31].
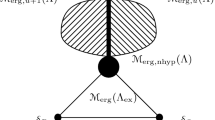
Note that conditions A–C have very important dynamical sense. Namely, when these conditions hold the corresponding diffeomorphism f has, see [34, 36],
-
A global smooth invariant center manifold W c which contains the orbits \(O\) and Γ 0 as well as all orbits entirely lying in \(U\) .
This manifold is normally-hyperbolic (in sense of [25]), since f is exponentially contracting along transversal to W c directions which correspond, at O, to the u-directions. Therefore, \(\text{dim} W^c =2\) or \(\text{dim} W^c =3\) depending on A1 or A2 holds and, thus, the problem under consideration allows the so-called dimension reduction to \(\text{dim}=2\) or \(\text{dim}=3\), respectively. Therefore, it has a certain sense to single out this type of homoclinic tangencies, i.e. the simple homoclinic tangencies.
However, an insufficient smoothness of W c (only \(C^{1+\epsilon}\), the same as for W ue) “destroys” the condition D in the restricted system \({f}\bigl|{W^c}\). Therefore, when this condition is principally important (see Sect. 5) we should work with the initial multidimensional system (even in the sectionally dissipative case \(\sigma<1\)). On the other hand, the condition D is hardly controlled one (for specific systems) and, therefore, it is reasonable to assume that only its topological variant takes place, i.e. the homoclinic tangency is simple one-sided or simple topological crossing (here, “simple” means again that conditions A–C are fulfilled). In this case one can obtain certain meaningful results related to the existence of horseshoes (topological or even hyperbolic) in the case \(\sigma>1\). See Sect. 4.
3.1 On a Coordinate Expression of the Simple Homoclinic Tangency
We will use in U 0 local coordinates in which the saddle map T 0 takes the so-called main normal form or normal form of the first order. This form is very convenient for calculations and, in contrast to the linear form, exists always. Thus, the following result holds.
Lemma 1
[13, 8, 34] . Let f be C r ( \(r\geq 2\) ) and O have multipliers \(\lambda_1,\dots,\lambda_m,\gamma\) satisfying (1). Then the map \(T_0=f\bigl|U_0\) can be written, in some C r -coordinates \((x,u,y)\) on U, as follows:
where eigenvalues of the matrix \(\hat{A}\) are equal to \(|\lambda_1|\) by absolute values, whereas, eigenvalues of \(\hat{B}\) are all smaller. Besides, the functions \(h_1,h_2,h_3\) satisfy conditions
Remark 1
The proof of Lemma 1 is based on the so-called “Afraimovich changes of variables” [1]. In turn, these changes generalize the method by E.A. Leontovich for construction of finitely-smooth normal forms of two-dimensional flows near saddle equilibria [27, 28]. See also [21, 34] for a modern treatment of this theory.
If condition A holds, we have in Lemma 1 that either \(x\in \mathbb{R}^1\) and \(\hat{A} = \lambda_1\) in case A1; or \(x\in \mathbb{R}^2\) and \(\hat A_2 = \lambda \left(\!\!\!\!\begin{array}{cc} \cos\psi & -\sin\psi \\ \sin\psi & \cos\psi\end{array} \!\!\!\!\right)\) in case A2.
Using the main normal form one can easily calculate any iterations \(T_0^k\), especially, when k is large that the following result shows.
Lemma 2
[13, 8, 34] Let \((x_k,u_k,y_k)= T_0^k(x_0,u_0,y_0)\) . When the local map T 0 is written in form (6) and identities (7) hold, the following relations take place for all large k:\
where \(\hat\lambda\) and \(\hat\gamma\) are some constants such that \(0 < \hat\lambda < |\lambda_1| \;,\hat\gamma> |\gamma|\) and functions \(\xi_{k},\eta_k,\hat\xi_k,\hat\eta_{k}\) are uniformly bounded for all k, along with the derivatives up to order \((r-2)\) . The derivatives of orders \((r-1)\) and r are estimated as follows \(\|x_k,u_k\|_{_{C^{r-1}}}\;=\;o(|\lambda_1|^k),\;\|y_0\|_{_{C^{r-1}}}\;=\;o(|\gamma|^{-k})\) and \(\|x_k,u_k,y_0\|_{_{C^{r}}}=o(1)_{k\rightarrow\infty}\) .
In the coordinates of Lemma 1, the manifolds \(W^{s}_{loc}(O)\), \(W^{u}_{loc}(O)\) as well as \(W^{ss}_{loc}\) are straightened, i.e. they have the following equations:
Hence, we can write that \(M^+ = (x^+,u^+,0)\) and \(M^-(0,0,y^-)\), where \(y^->0\). If condition B holds, then \(\|x^+\|\; \neq\; 0\). In case A1, since \(x\in \mathbb{R}^1\) (and \(u\in \mathbb{R}^{m-1}\)), it means that \(x^+\neq 0\) and we assume that \(x^+>0\) here.
Define the neighbourhoods \(\Pi^+\) and Π− of \(M^+\) and M -, respectively, as follows
where \(\varepsilon_0>0\), \(\varepsilon_1>0\) are sufficiently small and \(T_0\Pi^+\cap\Pi^+=\emptyset\), \(T_0^{-1}\Pi^-\cap\Pi^-=\emptyset\).
The global map \(T_1\equiv f^q: \Pi^-\to\Pi^+\) can be written as follows
where C r-functions F and G are defined on Π− and \(F(0)=0,G(0)=0\) as well as \(G_y(0)=0\). Then we can write the map T 1 in the following form
where \(\varphi(0)=0\) and \(\varphi^\prime(0)=0\), since the curve \(T_1(W^u_{loc})\) touches \(W^s_{loc}\) at the point \(M^+\), and
If condition D holds, then
Note also that, in the coordinates of Lemma 1, the foliation F ss has a form \(\{x=const,y=0\}\) and the tangent space \({\cal T}_{M}W^{ue}\) to W ue at any point \(M\in W^u_{loc}\) is the plane u = 0. Then condition C means, by (11), that the planes \({\cal T}_{M^+}W^{ue}:\;\{(\bar x -x^+,\bar u -u^+) = a x + b (y-y^-), \;\bar y = c x\}\) and \(F^{ss}(M^+):\;\left\{\bar x=x^+,\bar y=0\right\}\) are transversal (here, \({\cal T}_{M^+}W^{ue}\) is given in a parameter form where x and (y-y -) are parameters). It means that the system \((0,u-u^+)= ax + b(y-y^-), 0 = cx\) has a unique solution. Thus, condition C reads as
or as
Note that Fig. 5 b and c correspond to the case A1 with \(b_1=0\) and c = 0, respectively.
4 On Simple Homoclinic Tangencies in the Sectionally Saddle Case
In this section we consider, essentially, the multidimensional sectionally saddle case \(\sigma>1\). Concerning a type of the homoclinic tangencies, we assume in this section that they are isolated and one-sided.
Then f can possess both trivial and non-trivial dynamics near Γ0 depending on type of the tangency.
Remark 2
In the case of topological intersection, infinitely many topological horseshoes near the homoclinic tangency always exist. It follows from the fact that the system \(f\bigl|\Lambda\) is semi-conjugate to \({\cal B}_2^{\bar k +q}\) (compare with the Shilnikov theorem from Introduction). However, even in this case, if conditions A1, B and C hold (i.e. O is a saddle and the tangency is simple), infinitely many hyperbolic horseshoes (in the sense of Definition 1) exist. This fact follows directly from the Katok theory, since the problem allows reduction to \(\text{dim}=2\) in this situation. Note that in [11] certain classes of systems with simple homoclinic tangencies of odd order are described for which \(f\bigl|\Lambda\) is topologically conjugate to \({\cal B}^2_{\bar k +q}\) and all orbits of Λ, except Γ0, are of saddle type.
We introduce the so-called “index of one-sided tangency” ν0 that can take values +1 or −1 and is defined as follows. Consider the piece \(T_1(W^u_{loc})\cap\Pi^+\) of \(W^u(O)\) which, by (11), has the equation
written in the parametric form, where \(\alpha = y-y^-\) is a parameter. Since \(\varphi(0)=0,\varphi^\prime(0)=0\), the curve (16) touches the plane \(\bar y=0\) at \(\alpha=0\). Let this tangency be one-sided, then we define
Thus, if \(\gamma>0\) the homoclinic tangency (one-sided and isolated) is “from below” if \(\nu_0=-1\) and it is “from above” if \(\nu_0=+1\). If \(\gamma<0\) the value of index ν0 depends on a choice of homoclinic points in such a way that, for example, \(\nu_0(M^+)=-\nu_0(f(M^+))\); it means that we can always take such pairs of the homoclinic points that \(\nu_0=+1\). Note that if the tangency is of even order, then \(\nu_0\;=\;\mbox{sign}\;d\) that follows directly from (13).
Theorem 2 [Simple homoclinic tangencies with trivial dynamics]
Let f have a one-sided homoclinic tangency satisfying A1, B and C and one of the following conditions: (1) \(\sigma<1\) and \(\gamma>0, \nu_0<0\) ; (2) \(\sigma>1\) and \(\lambda_1>0, c\nu_0>0\) or 3) \(\lambda_1>0,\gamma>0, c<0,\nu_0<0\) (independently on σ).
Then f possesses trivial dynamics near Γ 0 , i.e. \(\Lambda=O\cup\Gamma_0\) .
Proof
Item 1 of the theorem is a partial case of Theorem 1, see Fig. 6a.

Examples of simple homoclinic tangencies with trivial dynamics for \(\lambda_1>0,\gamma>0\)
Consider item 2 of the theorem.
Since A1 holds, the map T 0, by Lemma 1, takes the form
where \(x,y\in \mathbb{R}^1\), \(u\in \mathbb{R}^{m-1}\) and the matrix \(\hat B\) has eigenvalues \(\lambda_2,\dots,\lambda_m\). Then, by Lemma 2, map \(T_0^k\) can be written in the following cross-form (compare with (8))
Using (11) we can write the first return map \(T_k = T_1T_0^k: \sigma_k^0\mapsto\Pi^+\) as follows
where \(x_0,y_0,y_1\in \mathbb{R}^1, u_0\in \mathbb{R}^{m-1}\). Let \(\bar y_0\) be the y-coordinate of a point inside some strip \(\sigma_j^0\subset\Pi^+\). Then we can write, by (18), that \(\bar y_0 = \gamma^{-j}\bar y_1 + O(\tilde\gamma^{-j})\). Introduce the coordinates \(\xi = x_0-x^+,\hat\xi = u_0-u^+\) and \(\eta = y_1-y^-\). Then we can write the second equation of (19) in the form
Since \(\xi,\hat\xi,\eta\) are small, \(x^+>0,y^->0\) as well as \(\lambda_1>0\) and \(c_1\nu_0>0\), Eq. (20) can have solutions only in the case \(|\gamma|^{-j} \geq \lambda_1^k\). Since \(|\lambda_1\gamma|>1\), this inequality can be fulfilled if only \(k\gg j\). Thus, any horseshoe \(T_1(\sigma_k^1)\) can intersect only those strips \(\sigma_j^0\) whose numbers are strictly less than k, see Fig. 6b. It implies that some forward iteration of any point from \(\Pi^+\) must leave U. Thus, only two orbits, O and Γ0, will always stay in U which implies that the dynamics is trivial.
In the case \(\lambda_1>0,\gamma>0,c_1<0,\nu_0<0\), Eq. (20) has no solutions at all, independently on σ. It means that the horseshoes \(T_1(\sigma_k^1)\) do not intersect any strip \(\sigma_i^0\), see Fig. 6c, i.e. the dynamics is trivial. This completes item (3) of the theorem.
Theorem 3 [Simple one-sided tangencies with non-trivial dynamics at σ 1]
Let f have a one-sided homoclinic tangency satisfying conditions A–C and let \(\sigma>1\) . Then the set \(\Lambda(f)\) contains infinitely many topological horseshoes in the following cases:
(1) the point O is a saddle-focus, i.e. conditions A2 holds; (2) the point O is a saddle, i.e. A1 holds, and the combination \(\lambda_1>0, \nu_0>0\) of the signs takes no place.
Proof
In the case of item 1 of the theorem, we have, by Lemma 1, that the local map T 0 has the form
where \(x=(x_1,x_2)\) and \(R_\psi\) is the rotation matrix (on the angle ψ). The global map T 1 has now form (11), where \(c= (c_1,c_2)\) and \(c_1^2+c_2^2\neq 0\) by the condition C and \(\varphi(s)\) is a function of fixed sign at \(s\neq 0\) because the homoclinic tangency is one-sided.
Consider the first return map \({T}_k = T_1T_0^k:\sigma_k^0\mapsto\Pi^+\) which can be written now as
Let us show that, for infinitely many values of k, these maps T k are, geometrically, Smale horseshoe maps. Introduce new x-coordinates as \(\xi_1=x_1-x^+_1,\xi_2=x_2-x^+_2\). Then the second equation from (21) can be written as
where \(\hat{C} = \sqrt{(c_1^2+c_2^2)((x_1^+)^2 +(x_2^+)^2)}\) and \(\theta\in [0,2\pi)\) is an angle such that \(\cos\theta = (c_1x_1^+ + c_2x_2^+)\hat{C}^{-1},\;\cos\theta = (c_2x_1^+ - c_1x_2^+)\hat{C}^{-1}\).
Note that \(\hat C>0\), since the conditions B and C imply, respectively, that \((x_1^+)^2 +(x_2^+)^2\neq 0\) and \(c_1^2+c_2^2\neq 0\).
Let \(\varphi(s)\geq 0\) and \(\gamma>0\), for the sake of definiteness. Then \(\bar y\) from (22) can run values from \(\bar y_{min} = \lambda^k (\hat{C}\cos(k\psi + \theta) + O(\|\xi\|))\) till \(\bar y_{max} = \max\varphi(s)_{|s|\leq\varepsilon_1} + O(\lambda^k)\). However, values of the coordinate y on the strip \(\sigma_k^0\) satisfy the inequality
Evidently, there are such \(\delta_0>0\) and \(\delta_1>0\) that (i) \(\bar y_{max}>\delta_0\) for all sufficiently large k and (ii) for any ψ, since \(\hat C>0\) and \(\|\xi\|\) is small, there are infinitely many such k that \((\hat{C}\cos(k\psi + \theta) + O(\|\xi\|))<-\delta_1\). Thus, the first return map \(T_1T^k\) for such values of k transforms the strip \(\sigma_k^0\) into the horseshoe \({T}_k(\sigma_k^0)\) such that its top is posed below \(\sigma_k^0\) (and even below \(W^s_{loc}\)) and the horseshoe intersects \(\sigma_k^0\) forming (at least) two connected components. Thus, f possesses, in this case, infinitely many geometrical Smale horseshoes. Other cases are considered analogously.
Consider item 2 of the theorem. Since A1 holds, the map \({T}_k = T_1T_0^k:\sigma_k^0\mapsto\Pi^+\) can be written now as
Denote \(\xi=x-x^+\). Then the second equation from (24) is rewritten as
Consider the model equation \(\gamma^{-k}y^- = c\lambda_1^k x^+ + \varphi(s)\) where \(s\in [-\varepsilon_1,\varepsilon_1]\) and for some \(\hat\delta>0\), \(\varphi(s)\in [0,\hat\delta]\) or \(\varphi(s)\in [-\hat\delta,0]\) and \(\nu_0 = \mbox{sign}\varphi(s)_{s\neq 0}\). Since \(|\lambda_1\gamma|>1\), this equation has no solution (with respect to s) only in the case where \(\lambda_1>0\) and \(c\nu_0>0\). In other cases, at least two solutions exist.
It gives us the desired result.
4.1 On the Necessity of Conditions A and C for the Existence/Absence of Topological Horseshoes
Note that, in the sectionally dissipative case \(\sigma<1\), as we can see from Theorem 1, conditions A, B and C play only a role of auxiliary conditions which help to establish certain hyperbolic properties. However, in the sectionally saddle case \(\sigma>1\), these conditions become necessary even for the topological horseshoe property. If they are violated, then the corresponding system can possess either trivial dynamics or horseshoes depending on new characteristics of the corresponding (non-simple) homoclinic tangency. We illustrate this fact by means of considering a three-dimensional model below.
Let g 0 be a three-dimensional diffeomorphism having a saddle fixed point \(\hat O\) with multipliers \(\lambda_1,\lambda_2,\gamma\), where \(0\!<\!\!\lambda_2\!<\!\!\lambda_1\!<\!\!1\!<\!\!\gamma\) and \(\lambda_1\gamma\!\!>\!\!1\), and a homoclinic orbit \(\hat\Gamma_0\) at whose points the manifolds \(W^u(\hat O)\) and \(W^s(\hat O)\) have a quadratic tangency. We assume also that this homoclinic tangency is not simple, the local map T 0 is linear and the global map T 1 is of model form. We take T 0 in the linear form \((\bar x,\bar u, \bar y) = (\lambda_1 x,\lambda_2 u,\gamma y)\) and T 1 in the following form
where \(b_1a_{21}\hat c\neq 0\), since the map T 1 should be diffeomorphism. We see that condition C is violated in this case: the model map T 1 corresponds to the case where c = 0 in (11), i.e. (14) is not valid here. We assume, for more definiteness, that \(d<0\), i.e. the quadratic homoclinic tangency is “from below”. We assume also that \(u^+>0\) in the given example.
Proposition 3
The following dynamical properties of g 0 hold.
- (i):
-
If \(\hat c <0\) , then \(\Lambda(g_0)\) is trivial, i.e. \(\Lambda(g_0)= \hat O\cup \hat\Gamma_0\) .
- (ii):
-
If \(\hat c>0\) and \(\lambda_2\gamma<1\) , then \(\Lambda(g_0)\) is trivial, i.e. \(\Lambda(g_0)= \hat O\cup \hat G_0\) .
- (iii):
-
If \(\hat c>0\) and \(\lambda_2\gamma>1\) , then \(\Lambda(g_0)\) contains infinitely many geometrical Smale horseshoes.
Proof
Since the corresponding results have an independent interest and the proof consists mainly in direct calculations, we analyse the problem under consideration in more detail than before. Since T 0 is linear, the equations of \(W^s_{loc}(O)\) and \(W^u_{loc}(O)\) are y = 0 and \((x=0,u=0)\), respectively. We choose a pair of homoclinic points: \(M^+(x^+,u^+,0)\in W^s_{loc}\) and \(M^-(0,0,y^-)\in W^u_{loc}\) assuming that \(u^+>0,y^->0\). We consider sufficiently small rectangle neighbourhoods \(\Pi^+\,{=}\,\{|x-x^+|\,{\leq}\,\varepsilon_0,|u-u^+|\,{\leq}\) \(\varepsilon_0,|y|\leq\varepsilon_0)\}\) and \(\Pi^-\,{=}\,\{|x|\leq\varepsilon_1,|u|\leq\varepsilon_1,|y-y^-|\leq\varepsilon_1)\}\) of the points \(M^+\) and M -, respectively, such that \(T_0(\Pi^+)\cap\Pi^+=\emptyset\) and \(T_0^{-1}(\Pi^-)\cap\Pi^-=\emptyset\). Note that (for any \(\varepsilon_{0,1}>0\)) there exist points on \(\Pi^+\) whose iterations under T 0 reach Π−. The set of such initial points on \(\Pi^+\) consists from countable many disjoint strips \(\sigma_k^0, k=\bar k,\bar k+1,\dots\) Accordingly, a countable many disjoint strips \(\sigma_k^1, k=\bar k,\bar k+1,\dots\) exists on Π− such that \(\sigma_k^1 =T_0^k(\sigma_k^0)\). Note also that the strips \(\sigma_k^0\) and \(\sigma_k^1\) are defined as \(\sigma_k^0 =\Pi^+\cap T_0^{-k}(\Pi^-)\) and \(\sigma_k^1 =\Pi^-\cap T_0^{k}(\Pi^+)\). In the case under consideration, since the map \(T_0^k\) can be written in the form
we can write exact formulas for the strips:
For the sake of definiteness, we will denote coordinates \(x,u,y\) of points in \(\Pi^+\) as \(x_0,u_0,y_0\) and in Π− as \(x_1,u_1,y_1\). Now we take the strip \(\sigma_k^1\) and consider its image, horseshoe \(T_1(\sigma_k^1)\), under the global map T 1.
By (25), we obtain that \(T_1(\sigma_k^1)\) is a 3D-figure in \(\Pi^+\) which can be given in the coordinate form as follows
where the coordinates \((x_1,u_1,y_1)\) run values along \(\sigma_k^1\), see formula (28).

Examples of homoclinic tangencies with c = 0 in the sectionally saddle case \(\sigma>1\): a The dynamics is trivial; b Smale horseshoes exist
Consider now item (i), \(\hat c <0\), of Proposition (22) and show that here \(T_1(\sigma_k^1)\cap\sigma_j^0=\emptyset\) for all sufficiently large k and j. Suppose, however, that \(T_1(\sigma_k^1)\cap\sigma_j^0\neq\emptyset\) for some k and j. Then, evidently, by virtue of (27), (28) and (29), the equation
has solutions with respect to \(\eta\in [y^- -\varepsilon_1,y^- +\varepsilon_1]\) when \((\xi,z)\) run values from the domain \((|\xi-u^+|\leq\varepsilon_0,|z|\leq\varepsilon_1)\). Note that since \(u^+>0,y^->0\) such η and ξ take only positive values for sufficiently small \(\varepsilon_{0,1}\). Then, since \(d<0,\lambda_2>0,\gamma>0\), Eq. (30) can have solutions only in that case where
However, since \(\hat c <0\), the latter inequality is not valid for any \(j,k\geq \bar k\). It implies that the horseshoes \(T_1(\sigma_k^1)\) and strips \(\sigma_j^0\) do not intersect each other in this case. Geometrically, it follows from the fact that in the case \(\hat c <0\) the strips \(\sigma_j^0\) and the horseshoes \(T_1(\sigma_k^1)\) are posed in \(\Pi^+\) on different sides from a plane \(W^s_{loc}: y=0\), see Fig. 7a. Hence, the diffeomorphism g 0 has a trivial dynamics here: \(\Lambda(g_0)= \hat O\cup \hat\Gamma_0\).
Consider now it item (ii), \(\hat c>0\) and \(\lambda_2\gamma<1\), of Proposition 3. Again we obtain that if \(T_1(\sigma_k^1)\cap\sigma_j^0\neq\emptyset\), then the inequality (31) has solutions. Since \(\gamma^{-1}>\lambda_2\) in this case, the Eq. (30) can have solutions only if j > k. It follows that \(T_1(\sigma_k^1)\cap\sigma_k^0 = \emptyset\), i.e. g 0 has no (topological) horseshoes in U, and, moreover, \(\Lambda(g_0)= \hat O\cup \hat\Gamma_0\) here.
Consider now item (iii), \(\hat c>0\) and \(\lambda_2\gamma>1\), of Proposition 28. We obtain from (29) and (28) that the horseshoe \(T_1(\sigma_k^1)\) has a top with coordinate \(y_0^{top} \sim \hat c \lambda_2^k u^+\) and its bottom (i.e. T 1-image of the top and bottom of the strip \(\sigma_k^1\)) has coordinate \(y_0^{bot}\sim d\varepsilon_1^2 + \hat c \lambda_2^k u^+\). Since \(\lambda_2\gamma>1\) we have that \(y_0^{top}> \gamma^{-k}(y^-+\varepsilon_1)\), i.e. the top of the horseshoe \(T_1(\sigma_k^1)\) is posed above the strip \(\sigma_k^0\). Since \(d<0\) we have that \(y_0^{bot}<0\) for sufficiently large k, i.e. the bottom of \(T_1(\sigma_k^1)\) is posed below the strip \(\sigma_k^0\). Thus, the first return maps \(T_k = T_1T_0^k\) for all sufficiently large k are in this case, topologically, Smale horseshoe maps. This completes the proof.
5 Hyperbolic Properties of Diffeomorphisms with Simple Homoclinic Tangencies of Finite Order
We assume now that f satisfies conditions A)–D). Then reformulating Theorem 2 we select class of simple homoclinic tangencies of finite order. Namely, Theorem 2 implies the following result
Proposition 4
Let a diffeomorphism f satisfying conditions A–D with even n be such that 1) either \(\gamma>0, d<0\) in the case \(\sigma<1\) ; 2) or \(\lambda_1>0, cd>0\) in the case \(\sigma>1\) ; 3) or \(\lambda_1>0,\gamma>0, c<0,d<0\) independently on σ. Then f possesses trivial dynamics near Γ 0 , i.e. \(\Lambda=O\cup\Gamma_0\) .
Other diffeomorphisms under consideration will contain non-trivial hyperbolic subsets inside Λ. The corresponding results were proved in [5, 6, 11] and [24]. Therefore, we give here only some review of results.
Among the diffeomorphisms with hyperbolic subsets we select first those which admits a complete description of Λ. Namely, let f satisfy conditions A1, B, C and D with \(\gamma>0,\lambda_1>0, c<0\) and also \(d>0\) when n is even. We bring such diffeomorphisms to the complete class.

Homoclinic tangencies for diffeomorphisms from the complete class. a The order of tangency n is even and the corresponding homoclinic tangency is “from above”, i.e. \(d>0\) and \(\gamma>0\), and the horseshoes \(T_1\sigma_k^1\) are posed under \(T_1(W^u_{loc})\), i.e. \(c<0\) and \(\lambda_1>0\). b n is odd and \(\gamma>0,\lambda_1>0\) and \(c<0\)
In this case the geometry of the strips \(\sigma_k^0\) and horseshoes \(T_1(\sigma_i^1)\) for all possible \(i,k\geq\bar k\) is of such type as in Fig. 8: all strips and horseshoes intersect “regularly”. As it was shown still in [5, 6], such a geometry implies a non-uniform hyperbolicity: all orbits of Λ, except for Γ0, are of saddle type and the set Λ can be described completely in terms of the symbolic dynamics.
If n is odd (the tangency if like cubic), then Λ can be identified with \({\cal B}_2^{\bar k + q}\) as in the case of transversal homoclinic orbit. If n is even, the set Λ is described now by means of the topological Bernoulli scheme (shift) \({\cal B}_3\) with three symbols. Namely, let \({\cal B}_3^{\bar k + q}\) be a subsystem of \({\cal B}_3\) which contains all bi-infinite sequences of form
where \(\alpha_i\in \{1,2\}\) and \(j_i\geq\bar k\) for all i.Footnote 6 We identify in \({\cal B}_3^{\bar k + q}\) two homoclinic orbits \(\omega_1 = (\dots,0,\dots,0,1,0,\dots,0,\dots)\) and \(\omega_2 = (\dots,0,\dots,0,2,0,\dots,0,\dots)\) and let \(\hat\omega\) be the glued orbit. We denote the resulting factor-system as \(\hat{\cal B}_3^{\bar k + q}\).
Theorem 4
Let f belong to the complete class. Then there exists such \(\bar k\) that all orbits from the set Λ, except for Γ 0 , are of saddle type and the system \(f|_\Lambda\) is topologically conjugate either to \({\cal B}_2^{\bar k + q}\) for odd n or \(\hat{\cal B}_3^{\bar k + q}\) for even n.
Note that we do not require here that the saddle value σ is less or greater than 1. Therefore, the structure of the set \(\Lambda(f)\) for systems from the complete class is the same for all cases of the sectionally dissipative, saddle or neutral (\(\sigma=1\)) ones.
In the remaining cases (except for diffeomorphisms of trivial and complete classes), the set Λ does not allow, in general, the complete description. Moreover, as it is shown in [17–20], Λ can contain periodic and homoclinic orbits of any orders of degeneracy (including homoclinic and heteroclinic tangencies of indefinite orders). Nevertheless, we can observe here certain elements of hyperbolicity and, moreover, we are able to give a description of hyperbolic subsets by means of methods of the symbolic dynamics like it was done for diffeomorphisms of complete class.
However, while for diffeomorphisms of the complete class, all strips \(\sigma_i^0\) and horseshoes \(T_1(\sigma_j^1)\) have regular intersections, in other cases we have both to detect regular intersections and remove, from a description, all irregular and empty ones. As result, we obtain some sufficient conditions (in form of inequalities, see below) which provide the existence of certain (non-uniformly) hyperbolic subsets.
Formally speaking, we consider in this section such diffeomorphisms which satisfy conditions A–D but are not diffeomorphisms with trivial and complete description. We will call them as diffeomorphisms with partial description.Footnote 7
Let \(\Omega_2^{\bar k + q}\) be such a subsystem of \({\cal B}_2^{\bar k + q}\) which contains the fixed point \(\hat O\), the homoclinic orbit \(\hat\omega = (\dots,0,\dots,0,1,0,\dots,0,\dots)\) and all such orbits of form (32), where \(\alpha_i=1\) for any i and the following estimates hold for any successive integers \(\bar k \leq j_i\leq \infty\) and \(\bar k \leq j_{i+1}\leq \infty\)
- (H1):
-
\(|\gamma^{-j_{i+1}}y^- - c\lambda_1^{j_i}x_1^+|> S_{\bar{k}}(j_i,j_{i+1})\) in the case A1;
- (H2):
-
\(|\gamma^{-j_{i+1}}y^- - Q\cos(j_i\psi + \omega)\cdot\lambda^{j_i}|> S_{\bar k}(j_i,j_{i+1})\) in the case A2;
where
and ν is some positive constant independent of \(\bar k, j_i\) and \(j_{i+1}\).
Let \(\hat\Omega_3^{\bar k + q}\) be such a subsystem of \(\hat{\cal B}_3^{\bar k + q}\) which contains the fixed point \(\hat O\) the homoclinic orbit \(\hat\omega\) and all such orbits of form (32) for which the following estimates hold
- (H3):
-
\(d\left[\gamma^{-j_{i+1}}y^- - c_1\lambda_1^{j_i}x_1^+\right]> S_{\bar k}(j_i,j_{i+1})\) in the case A1;
- (H4):
-
\(d\left[\gamma^{-j_{i+1}}y^- - Q\cos(j_i\psi + \omega)\cdot\lambda^{j_i}\right]> S_{\bar k}(j_i,j_{i+1})\) in the case A2;
Theorem 5
[6, 24] Let f be a diffeomorphism with partial description. Then there is a closed invariant subset \(\tilde\Lambda_{\bar k+q} \subset\Lambda\) such that (i) \(\tilde\Lambda_{\bar k+q}\) contains the orbits O and Γ 0 ; (ii) all orbits of \(\tilde\Lambda_{\bar k+q}\) , except for Γ 0 , are of saddle type; (iii) the system \(f\bigl|{\tilde\Lambda_{\bar k+q}}\) is conjugate either to \(\Omega_2^{\bar k + q}\) for odd n or to \(\tilde\Omega_3^{\bar k + q}\) for even n.
One can deduce certain simple consequences from this theorem on the existence of Smale horseshoes in the first return maps. For the sake of definiteness, we consider case of even order n (like quadratic) of the tangency. Then it follows directly from Theorem 5 that
-
If the estimates H3 or H4 hold for \(j_i = j_{i+1}=k\), then the first return map \(T_k\equiv T_1T_0^k:\;\sigma_k^0\to\sigma_k^0\) has in \(\sigma_k^0\) a Smale horseshoe, i.e. a closed invariant hyperbolic set \(\Omega_{k+q}\) such that the system \(T^k\bigl|\Omega_{k+q}\) is topologically conjugate to \({\cal B}_2\).
In the sectionally dissipative case \(\sigma<1\), we have that \(|\lambda_1|^k\ll |\gamma|^{-k}\). Then both the inequalities (H3) and (H4) with sufficiently large \(j_i=j_{i+1}=k\) can be rewritten as follows \(d\gamma^{-k}y^->0.\;\) Since \(y^->0\), it implies the following result.
Proposition 5
Let f satisfy conditions A–D with even n and \(\sigma<1\) , and let the case \(\gamma>0,d<0\) be excluded. Then, f has infinitely many Smale horseshoes \(\Omega_{k+q}\) , where \(k\geq\bar k\) and k run all integers if \(\gamma>0\) or all odd (even) integers if \(\gamma<0,d<0\) ( \(\gamma<0,d>0\) ).
In the sectionally saddle case \(\sigma>1\), we have, conversely, that \(|\gamma|^{-k}\ll |\lambda_1|^k\). Then, for sufficiently large \(\bar k\), the inequalities (H3) and (H4), for \(j_i=j_{i+1}=k\geq\bar k\), take, respectively, the following forms
and
where \(\nu(\bar k)\to 0\) as \(\bar k\to\infty\). (Note that we can not write in (35) simply “ \(>0\)” since values of \(\cos(k\psi + \omega)\) are not uniformly bounded from zero when \(\psi/\pi\) is irrational).
The inequality (34) has no solutions only in the case \(\lambda_1>0, dc_1>0\), i.e. for diffeomorphisms with trivial dynamics. Since \(Q>0\) and \(\psi\neq 0,\pi\), the inequality (35) has always infinitely many integer solutions. Thus, we obtain the following.
Proposition 6
Let f satisfy conditions A–D with even n and \(\sigma>1\) , and let the case \(\lambda_1>0, dc_1>0\) be excluded. Then, f has infinitely many Smale horseshoes \(\Omega_{k+q}\) , where \(k\geq\bar k\) and k run all integers such that the inequalities (34) in case A1 or (35) in case A2 hold.
5.1 Invariants θ and τ and a Complete Description of \(\tilde\Lambda_{\bar k}\)
Note that the inequalities H1–H4 generally define an “infinite net” of the strips and horseshoes which have regular (hyperbolic) intersections. Naturally, conditions H1–H4 are only sufficient. However, using them we describe quite large (non-uniformly) hyperbolic subsets \(\tilde\Lambda_{\bar k +q} \subset\Lambda\). Moreover, for some dense subset of systems with homoclinic tangency, \(\tilde\Lambda_{\bar k+q}\) can provide a complete description for Λ, i.e. \(\Lambda = \tilde\Lambda_{\bar k+q}\).
In this section we will prove the corresponding result for the case where O is a saddle, i.e. condition A1 holds.
Consider the following inequality
By geometric constructions (see [6, 24]), integer solutions \((j_i,j_{i+1})\) of this inequality include all numbers of those strips and horseshoes which can intersect non-hyperbolically. By (33), the inequality (36) is equivalent to the following system of inequalities
where
If both sides of the inequalities (37) are of the same sign (that can be always fulfilled for diffeomorphisms with partial description), we take the logarithm of them.
As result, we obtain the following double inequalities
where
and
Now we assume that the following condition holds:
-
S1)
θ is rational, i.e. \(\theta = r/s\) for some relatively prime natural
r and s, and the number \(s\tau\) is not integer.
Then the straight line \(j-i\theta +\tau =0\) is posed, in the \((i,j)\)-plane, on a finite distance (depending on θ and τ) from points of the integer lattice. This means that the inequality (38) has no integer solutions for sufficiently large \(\bar k\). In turn, it implies that all orbits of \(\Lambda_{\bar k+q}\), except for Γ0, are of saddle type.
In the case of odd n we have that if there is some non-saddle orbit in \(\Lambda_{\bar k+q}\), then the inequality opposite to H1, i.e. again inequality (36), has to be fulfilled for at least one pair \(j_i,j_{i+1}\).
Thus, the following result takes place.Footnote 8
Proposition 7
Let f be a diffeomorphism with partial description satisfying conditions A1, B, C, D, \(\sigma\neq 1\) and S1. Then there is such \(\bar k_1=\bar k_1(\theta,\tau)\) , where \(\bar k_1\to\infty\) as \(s\to\infty\) or \(s\tau\) tends to an integer, that all orbits of \(\Lambda_{\bar k_1+q}\) , except for Γ 0 , are of saddle type and \(f\bigl|\Lambda_{\bar k_1+q}\) is conjugate either to \(\Omega_2^{\bar k + q}\) for odd n or to \(\tilde\Omega_3^{\bar k + q}\) for even n.
6 Proof of Theorem 1
Here we assume only that a diffeomorphism f has a homoclinic tangency of the invariant manifolds of a saddle fixed point O with multipliers \(\lambda_1,\dots,\lambda_m, \gamma\) ordered by the rule (1) and such that \(\sigma\equiv|\lambda_1||\gamma|<1\). In the case under consideration, by
Lemma 1, we can write the local map T 0 in the following form
where \(x\in \mathbb{R}^m, y\in \mathbb{R}^1\), \({\cal A}\)– \((m\times m)\)-matrix with eigenvalues \(\lambda_1,\dots,\lambda_m\). This form of T 0 can be considered as form (6) with identities (7), where \({\cal A}=\mbox{diag}\;(\hat A,\hat B)\), \(\hat h_1=(h_1,h_2)\) and \(x_{new}=(x,u)\). Then, by (10), the global map T 1 takes the form
where \((x,y)\in\Pi^-, (\bar x,\bar y)\in\Pi^+\), \(F(0,0)=0,G(0,0)=0\) and \(\varphi(0)=\varphi^\prime(0)=0\). If the homoclinic tangency is isolated, then \(\varphi\neq 0\) at \(y\neq y^-\). Besides, in the case of one-sided tangency, we have that either \(\varphi\geq 0\) (the tangency “from above”) or \(\varphi\leq 0\) (the tangency “from below” if also \(\gamma>0\)); in the case of topological intersection, we have that either \(s\varphi(s)\geq 0\) (the tangency like “ \(y=x^3\)”) or \(s\varphi(s)\leq 0\) (the tangency like “ \(y=-x^3\)”), where \(s=(y-y^-)\).
Again, by Lemma 2, the map \(T_0^k\) can be written in the following cross-form (compare with (8))
Proof
[of item 1 of Theorem 1] Take some strip \(\sigma_k^1\subset\Pi^-\). Suppose that the corresponding horseshoe \(T_1(\sigma_k^1)\) has non-empty intersection with a strip \(\sigma_i^0\). Then, by (40) and (39), the equation
has a solution with respect to \(\bar y\) (for some \((x,y)\)). Note that the following estimate \(\|\alpha_k\| < \tilde\lambda^k\) holds for sufficiently large k, where \(\tilde\lambda = |\lambda_1|+\delta\) and \(\delta\geq 0\) is a sufficiently small constant such that, in any case, \(|\tilde\lambda\gamma|<1\).
Let the homoclinic tangency satisfy the condition (2). If \(\gamma>0\) (the main case), it means that \(\varphi(y_1-y^-)\leq 0\). Then the Eq. (41) can have a solution if only
Since \(\gamma>0\), \(\|\alpha_k\| < \tilde\lambda^k\) and \(|\tilde\lambda\gamma|<1\), the inequality above can hold only in the case where \(i\gg k\). Thus, any horseshoe \(T_1(\sigma_k^1)\) can intersect only those strips \(\sigma_i^0\) whose numbers are much bigger than k, see Fig. 9a. In turn, the horseshoe \(T_1(\sigma_i^1)\), again, can intersect only some strip \(\sigma_j^0\) with j > i, etc. It implies that some backward iteration of any point from \(\Pi^+\) must leave U. Thus, only two orbits, O and Γ0, will stay always in U.
If \(\gamma<0\), the condition (2) imply the identity \(\varphi(y_1-y^-)\equiv 0\). Evidently, Eq. (41) can have a solution in this case again only for \(i\gg k\).

A horseshoe geometry in the case \(\sigma<1\) for homoclinic tangencies a from below and b from above
Proof
[of item 2 of Theorem 1] Consider first the case of one-sided tangency “from above”. If \(\gamma<0\) we can always choose such homoclinic points M - and \(M^+\) that \(T_1(W^u)\) touches \(W^u_{loc}\) from above (if it not the case for a given point \(M^+\), we take the point \(T_0(M^+)\)). Then, by condition \(\varphi\geq 0\) and \(\varphi> 0\) if \(y_1\neq y^-\), we have that the curve \(T_1(W^u): x_0-x^+ = F(0,y_1-y^-), y_0= \varphi(y_1-y^-)\) will intersect all the strips \(\sigma_k^0\) with sufficiently large k (even k if \(\gamma<0)\) at least two connected components. (Note that the vector \(\hat l = F_y(0,0)\) is non-zero, since T 1 is diffeomorphism). The strips \(\sigma_k^0\) are posed on distance \(\rho_k \geq |\gamma|^{-k}(y^- - \varepsilon_1)\) from the plane \(y_0=0\). While, the strips \(\sigma_k^0\) are posed from the line x = 0 on the distance of order \(\tilde\lambda^k\). The latter means that the horseshoes \(T_1(\sigma_k^1)\) will be posed from \(T_1W^u_{loc}\) on the distance of order \(\tilde\lambda^k\). Since \(\tilde\lambda^k\ll |\gamma|^{-k}\), it follows that the strips \(\sigma_k^0\) with sufficiently large k will intersect own horseshoes \(T_1(\sigma_k^1)\) along at least two connected components (the same as they intersect the curve \(T_1W^u_{loc}\)). See Fig. 9b.
Concerning the case of topological intersection, we note that the curve \(T_1W^u_{loc}\) intersect infinitely many strips \(\sigma_k^0\). In turn, strips \(\sigma_j^1\) accumulate to \(W^u_{loc}\). It implies that infinitely many strips \(\sigma_k^0\) and horseshoes \(T_1(\sigma_j^1)\) for all sufficiently large k and j are mutually intersect.
Notes
- 1.
Note that the case \(\sigma=1\) (i.e. O is a neutral saddle) is very specific and we do not consider it here. We only refer the reader to papers [9, 12, 21] in which various cases of neutral saddles (\(\sigma=1\)) with homoclinic tangencies were analysed; see also papers [10, 14, 15] in which area-preserving maps were considered.
- 2.
- 3.
For example in the case of tangency “from above”, the topological (geometrical) horseshoe of map T k (for every value of k from an infinite sequence of integers) contains an T k -invariant subset Δ k such that the system \({T_k}|\Delta_k\) is uniformly hyperbolic and topologically conjugate to a subshift of finite type with positive topological entropy.
- 4.
We thank D. Turaev who attracted our attention to the interesting fact that the Katok theorem can be directly applied to the sectionally dissipative case. See also [35].
- 5.
Therefore, in problems of such type, it is not reasonable to use a C 1-linearization (which, by the way, does not always exist in the multidimensional case). This can lead to non-repairable mistakes in the proofs or to absurd results, and, in the best case, only very rough topological properties can be established [32, 4].
- 6.
We include also sequences with \(j_i=\infty\) or \(j_{i+1}=\infty\). Then such sequences contain infinite strings from zeros either on the left or, respectively, right end and correspond either α- or ω-asymptotic orbit to the fixed point \((\dots,0,\dots,0,\dots)\).
- 7.
Thus, the diffeomorphisms with partial description in the main case \(\sigma\neq 1\) are such that conditions A–D are valid and the following combinations of signs of the parameters \(\lambda_1,\gamma, c\) and d are excluded: (1) those ones which correspond to the trivial class, i.e. n is even and (i) \(\gamma>0, d<0\) if \(\sigma<1\), (ii) \(\lambda_1>0, dc>0\) if \(\sigma>1\); and (2) those ones which correspond to the complete class, i.e (iii) \(\gamma>0,\lambda_1>0, c<0,d>0\) with even n and (iv) \(\gamma>0,\lambda_1>0, c<0\) with odd n.
- 8.
This result was proved also in [6] for the sectionally dissipative case \(\sigma<1\).
References
Afraimovich, V.S.: On smooth changes of variables. Methods of Qualitative Theory of Differential Equations, Gorky State University, pp. 10–21 (1984) (in Russian)
Afraimovich, V.S., Shilnikov, L.P.: On singular orbits of dynamical systems. Uspekhi Math. Nauk 27(3), 189–190 (1972)
Afraimovich, V.S., Shilnikov, L.P.: On critical sets of Morse–Smale systems. Trans. Mosc. Math Soc. 28, 179–212 (1973)
Afraimovich, V., Young, T.: Multipliers of homoclinic tangencies and a theorem of Gonchenko and Shilnikov on area preserving maps. Int. J. Bifurc. Chaos 15(11), 3589–3594 (2005)
Gavrilov, N.K., Shilnikov, L.P.: On three-dimensional dynamical systems close to systems with a structurally unstable homoclinic curve, Part 1. Math. USSR Sb. 17, 467–485 (1972) (Part 2, Math. USSR Sb. 19, 139–156 (1973))
Gonchenko, S.V.: Non-trivial hyperbolic subsets of multidimensional systems with a nontransversal homoclinic curve. Methods of Qualitative Theory of Differential Equations. Gorky State University, pp. 89–102 (1984) (in Russian)
Gonchenko, S.V.: Dynamics and moduli of Ω-conjugacy of 4D-diffeomorphisms with a structurally unstable homoclinic orbit to a saddle-focus fixed point. Am. Math. Soc. Transl. 200(2), 107–134 (2000)
Gonchenko, S.V.: Dynamical systems with homoclinic tangencies, Ω-moduli and bifurcations. Doctor of Physics and Mathematical Sciences Thesis, Nizhny Novgorod, p. 300 (2004) (in Russian)
Gonchenko, S.V., Gonchenko, V.S.: On bifurcations of birth of closed invariant curves in the case of two-dimensional diffeomorphisms with homoclinic tangencies. Proc. Math. Steklov Inst. 244, 80–105 (2004)
Gonchenko, M.S., Gonchenko, S.V.: On cascades of elliptic periodic points in two-dimensional symplectic maps with homoclinic tangencies. Reg. Chaot. Dyn. 14(1), 116–136 (2009)
Gonchenko, S.V., Shilnikov, L.P.: On dynamical systems with structurally unstable homoclinic curves. Sov. Math. Dokl. 33, 234–238 (1986)
Gonchenko, S.V., Shilnikov, L.P.: Arithmetic properties of topological invariants of systems with a structurally unstable homoclinic trajectory. J. Ukr. Math. 39, 21–28 (1987)
Gonchenko, S.V., Shilnikov, L.P.: On moduli of systems with a nontransversal Poincaré homoclinic orbit. Russ. Acad. Sci. Izv. Math. 41(3), 417–445 (1993)
Gonchenko, S.V., Shilnikov, L.P.: On two-dimensional area-preserving mappings with homoclinic tangencies. Russ. Acad. Sci. Dokl. Math. 63(3), 395–399 (2001)
Gonchenko, S.V., Shilnikov, L.P.: On two-dimensional area-preserving maps with homoclinic tangencies that have infinitely many generic elliptic periodic points. Notes of S.-Peterburg. Branch of Math. Steklov Inst. (POMI) 300, 155–166 (2003)
Gonchenko, S.V., Shilnikov, L.P.: Homoclinic tangencies. Thematic issue: Moscow-Izhevsk, p. 52–4 (2007) (in Russian)
Gonchenko, S.V., Turaev, D.V., Shilnikov, L.P.: On models with a structurally unstable homoclinic curve. Sov. Math. Dokl. 44(2), 422–426 (1992)
Gonchenko, S.V., Shilnikov, L.P., Turaev, D.V.: On models with non-rough Poincaré homoclinic curves. Phys. D 62(1–4), 1–14 (1993)
Gonchenko, S.V., Turaev, D.V., Shilnikov, L.P.: Dynamical phenomena in multi-dimensional systems with a non-rough Poincaré homoclinic curve. Russ. Acad. Sci. Dokl. Math. 47(3), 410–415 (1993)
Gonchenko, S.V., Turaev, D.V., Shilnikov, L.P.: Homoclinic tangencies of any order in Newhouse regions. J. Math. Sci. 105, 1738–1778 (2001)
Gonchenko, S.V., Meiss, J.D., Ovsyannikov, I.I.: Chaotic dynamics of three-dimensional Henon maps that originate from a homoclinic bifurcation. Regul. Chaot. Dyn. 11(2), 191–212 (2006)
Gonchenko, S., Shilnikov, L., Turaev, D.: Homoclinic tangencies of arbitrarily high orders in conservative and dissipative two-dimensional maps.Nonlinearity 20, 241–275 (2007)
Gonchenko, S.V., Shilnikov, L.P., Turaev, D.V.: On dynamical properties of multidimensional diffeomorphisms from Newhouse regions. Nonlinearity 21(5), 923–972 (2008)
Gonchenko, S., Li, M.-C., Malkin, M.: On hyperbolic dynamics of multidimensional systems with homoclinic tangencies of arbitrary orders. (to appear)
Hirsch, M.W., Pugh, C.C., Shub, M.: Invariant Manifolds. Lecture Notes in Mathematics, vol. 583. Springer, Berlin (1977)
Homburg, A.J., Weiss, H.: A geometric criterion for positive topological entropy II: Homoclinic tangencies. Commun. Math. Phys. 208, 267–273 (1999)
Leontovich, E.A.: On a birth of limit cycles from a separatrix loop. Sov. Math. Dokl. 78(4), 641–644 (1951)
Leontovich, E.A.: Birth of limit cycles from a separatrix loop of a saddle of a planar system in the case of zero saddle value. Preprint VINITI, p. 11–4 (1988) (in Russian)
Ivanov, B.F.: Towards existence of closed trajectories in a neighbourhood of a homoclinic curve. J. Diff. Eq. 15(3), 548–550 (1979) (in Russian)
Katok, A.: Lyapunov exponents, entropy and periodic orbits for diffeomorphisms. IHES Publ. Math. 51, 137–173 (1980)
Newhouse, S.E, Palis, J., Takens, F.: Bifurcations and stability of families of diffeomorphisms. IHES Publ. Math. 57, 5–72 (1984)
Rayskin, V.: Homoclinic tangencies in \(\mathbb{R}^n\). Discret. Contin. Dyn. Syst. 12(3), 465–480 (2005)
Shilnikov, L.P.: On a Poincaré–Birkhoff problem. Math. USSR Sb. 3, 91–102 (1967)
Shilnikov, L.P., Shilnikov, A.L., Turaev, D.V., Chua, L.O.: Methods of Qualitative Theory in Nonlinear Dynamics, Part I. World Scientific, Singapore (1998) (Part II, 2001)
Shilnikov, L.P., Shilnikov, A.L., Turaev, D.V.: On some mathematical topics in classical synchronization. A tutorial. Int. J. Bifurc. Chaos 14(7), 2143–2160 (2004)
Turaev, D.V.: On dimension of non-local bifurcational problems. Int. J. Bifurc. Chaos 6, 919–948 (1996)
Acknowledgements
The authors thank M. Malkin and D. Turaev for very fruitful discussions. AG and SG have been partially supported by the Russian Scientific Foundation Grant 14-41-00044 and the grants of RFBR No.13-01-00589, 13-01-97028-povolzhye and 14-01-00344. ML was partially supported by a NSC research grant.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2015 Springer International Publishing Switzerland
About this chapter
Cite this chapter
Gonchenko, S., Gonchenko, A., Li, MC. (2015). On Topological and Hyperbolic Properties of Systems with Homoclinic Tangencies. In: González-Aguilar, H., Ugalde, E. (eds) Nonlinear Dynamics New Directions. Nonlinear Systems and Complexity, vol 12. Springer, Cham. https://doi.org/10.1007/978-3-319-09864-7_2
Download citation
DOI: https://doi.org/10.1007/978-3-319-09864-7_2
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-09863-0
Online ISBN: 978-3-319-09864-7
eBook Packages: EngineeringEngineering (R0)