
Abstract
The Razi acceleration is an acceleration term that appears as a result of applying the vector derivative transformation formula in a three relatively rotating coordinate frames system. The Razi term, \((_{A}^{C}\boldsymbol{\omega }_{B} \times _{B}^{C}\boldsymbol{\omega }_{C}) \times ^{C}\mathbf{r}\) appears when the first and the second derivatives of a position vector are taken from two different coordinate frames. This is technically called mixed double derivative transformation. The resulting expression is distinguishable from other types of inertial accelerations such as the Coriolis acceleration \(2_{A}^{C}\boldsymbol{\omega }_{C} \times _{C}^{C}\mathbf{v}\) and the centripetal acceleration \(_{A}^{C}\boldsymbol{\omega }_{C} \times (_{A}^{C}\boldsymbol{\omega }_{C} \times ^{C}\mathbf{r})\). However, the mixed double derivative expression does not give clear dynamical interpretation of the Razi acceleration. This work presents the finding that the Razi term also appears in rigid body rotation about a point. We show that the Razi acceleration has the property of an inertial acceleration, in which it acts on a body in compound rotation motion. This finding shows that the Razi term is another acceleration, along with the Coriolis, centripetal, and tangential accelerations, that appears due to the relative motion of rotating referential coordinate frames.
Access provided by Autonomous University of Puebla. Download chapter PDF
Similar content being viewed by others


Keywords
- Razi acceleration
- Rigid body kinematics
- Multiple coordinate system kinematics
- Coordinate transformation
1 Introduction
Jazar presented a revised method of calculating vector derivatives in multiple coordinate frames using the extended variation of the Euler derivative transformation formula (Jazar 2012). The paper derives the general expression for vector derivatives for a system of three relatively rotating coordinate frames called the mixed derivative transformation formula. The formula is demonstrated as follows: Let A, B, and C be three arbitrary, relatively rotating coordinate frames sharing an origin as shown in Fig. 2.1. Let \(^{B}\square \) be a generic vector expressed in the frame B, \(_{A}\boldsymbol{\omega }_{B}\) be the angular velocity of the frame B with respect to the frame A, and \(_{C}\boldsymbol{\omega }_{B}\) be the angular velocity of the frame B with respect to the frame C. The time-derivative of the B-vector as seen from the A frame can be expressed as
where the left superscript indicates the frame in which the vector is expressed. The formula relates the A-derivative of a B-vector to the C-derivative of the same B-vector by means of the angular velocity differences between the three coordinate frames. The formula presents a more general expression of the classical derivative transformation formula between two relatively rotating frames
where the frame C is assumed to coincide with B (C ≡ B), thus \(_{C}^{B}\boldsymbol{\omega }_{B} = 0\). One advantage of the general mixed derivative transformation formula is that it leaves the need to compute the derivative of \(^{B}d^{B}\square /dt\) in its local coordinate frame.

Three coordinate frames system
An interesting result appears from the application of a reference frame system with three coordinate frames. A new acceleration term, given the name the Razi acceleration (Jazar 2011), is shown to appear when the derivatives of an acceleration vector are taken from two different coordinate frames. Such differentiation, which resulting expression is called mixed acceleration, contains the Razi term, \((_{A}\boldsymbol{\omega }_{C} \times _{B}\boldsymbol{\omega }_{C}) \times \mathbf{r}\). To demonstrate the Razi acceleration term, let there be three relatively rotating coordinate frames A, B, and C, shown in Fig. 2.1. Assume a position vector r is expressed in its local frame which is C. Taking the first derivative of r in C from B using the vector derivative transformation formula Eq. (2.2) yields
Taking the derivative of \(\frac{{}^{B}d} {dt} {{}^{C}\mathbf{r}}\) again, but from the frame A yields:
where
and the left superscripts in (2.4) show that every vector is expressed in the frame C. The term \(\left (_{A}^{C}\boldsymbol{\omega }_{C} \times _{B}^{C}\boldsymbol{\omega }_{C}\right ) \times ^{C}\mathbf{r}\) is a new term in the acceleration expression called the Razi acceleration.
For comparison, let us assume that the frame B is not rotating and coincides with the frame A, making B ≡ A. Equation (2.4) is now reduced to the classical expression of acceleration between two relatively rotating frames B and C
Equation (2.6) shows that there are three supplementary terms to the absolute acceleration of a point in local frame C: The Coriolis acceleration \(2_{B}^{C}\boldsymbol{\omega }_{C} \times _{C}^{C}\mathbf{v}\), the tangential acceleration \(_{CB}^{\quad C}\boldsymbol{\alpha }_{C} \times ^{C}\mathbf{r}\), and the centripetal acceleration \(_{B}^{C}\boldsymbol{\omega }_{C} \times \left (_{B}^{C}\boldsymbol{\omega }_{C} \times ^{C}\mathbf{r}\right )\). The difference between the expressions in Eqs. (2.4) and (2.6) is the Razi term which has the form of a vector product between a product of two angular velocities and a position. This shows that adding another rotating coordinate frame and differentiating a displacement vector from two different frames reveals a new acceleration term.
It is shown in the published work of Jazar that the Razi acceleration is a novel finding in classical mechanics. In its current status, however, the Razi acceleration has only found a limited application in relative kinematics. This paper seeks to reveal the aspect of the Razi acceleration in mechanics of relative rigid body motion specifically in the multiple coordinate system kinematics. We show the inclusion of the new Razi term in the equation of motion of a rigid body described in non-inertial rotating coordinate frames. To do this, we redefine and extend the Euler derivative transformation formula to be applied in a system with arbitrary number of coordinate frames. We provide an illustrative example of a rigid body in compound rotation motion about a fixed point to show the appearance of the Razi acceleration. We compare the magnitudes of the Razi acceleration with the classical centripetal acceleration to show that in the case of complex rotating motion, the Razi acceleration may appear as a result of rotational inertia.
2 Time-Derivative and Coordinate Frame
The time-derivative of a vector depends on the coordinate frame in which it is differentiated. In a multiple coordinate frames environment, it is important to know from which coordinate the derivative vectors, e.g. velocity and acceleration, are calculated and to which coordinate frame it is related. In this section we introduce the derivative transformation formula and expand it to include more than two reference frames.
2.1 Euler Derivative Transformation Formula
Any vector r in a coordinate frame can be represented by its components using the basis vectors of the frame. Let \(B(O\hat{\imath}\hat{\jmath}\hat{k})\) be an arbitrary coordinate frame in which r is expressed. The vector is written using the basis vectors of B as
For r, a vector function of time, its components x, y, and z are scalar functions of time. The time-derivative of the vector r is
Since the basis vector is constant with respect to its own frame, the time-derivative of a vector expressed in B differentiated from its own frame B is
This is called a local or simple derivative since the vector derivative is taken from the coordinate frame in which it is also expressed. The result is a simple derivative of its scalar components.
Now consider global-fixed coordinate frame \(G(O\hat{I}\hat{J}\hat{K})\) and a rotating body-fixed coordinate frame \(B(O\hat{\imath}\hat{\jmath}\hat{k})\) as shown in Fig. 2.2. Due to the relative motion of the coordinate frames, the basis vectors of one frame are not constant in relation to the other frame. The time-derivative of a vector expressed in B differentiated from frame G is expressed as
Similarly, the time-derivative of a vector expressed in G differentiated from frame B is expressed as
An angular velocity vector can be defined in terms of a time-derivative of basis vectors coordinate frame in relation to another coordinate frame. The angular velocity of a rotating frame B in coordinate frame G, \(_{G}\boldsymbol{\omega }_{B}\), expressed using the B-coordinates, is written as
And the angular velocity of a rotating frame G in coordinate frame B, \(_{B}\boldsymbol{\omega }_{G}\), expressed using the G-coordinates, is written as
Equations (2.10) and (2.11) can be represented as
An alternate proof of Eqs. (2.14) and (2.15) is given in Appendix 1.

Binary coordinate frames system—a global-fixed frame G and a rotating body frame B
The resulting equations show the method of calculating and transforming the derivative of a vector expressed in one frame to another. This results in the most fundamental result of kinematics: Let A and B be two arbitrary frames which motion is related by the angular velocity \(\boldsymbol{\omega }\), for every vector □ expressed in B, its time derivative with respect to A is given by
This formula is called the Euler derivative transformation formula. It relates the first time-derivative of a vector with respect to another coordinate frame by means of angular velocity.
Despite its importance and ubiquitous application in classical mechanics, there is no universally accepted name for the Euler derivative transformation formula in Eq. (2.16). Several terminologies are used: kinematic theorem (Kane et al. 1983), transport theorem (Rao 2006), and transport equation (Kasdin and Paley 2011). These terms, although terminologically correct, are more prevalent in the subject of fluid mechanics to refer to entirely different concepts. We use Zipfel’s (Zipfel 2000) and Jazar’s (Jazar 2011) terminology, which we opine as more descriptive and unique to the subject of derivative kinematics. The name also is a homage to Leonard Euler who first used the technique of coordinate transformation in his works on rigid body dynamics (Koetsier 2007; Tenenbaum 2004; Baruh 1999; Van Der Ha and Shuster 2009).
2.2 Second Derivative
One of the most important applications resulting from the vector derivative transformation method is the development of inertial accelerations. Inertial accelerations, or sometimes called d’Alembert accelerations or, misnomerly, “fictitious” accelerations, are the acceleration terms that appear when the double-derivatives of a position vector are transformed from a rotating frame to an inertial frame or vice versa.
To demonstrate this, let G be an inertial coordinate frame and B a non-inertial coordinate frame rotating with respect to G with an angular velocity \(_{G}\boldsymbol{\omega }_{B}\). Using the Euler derivative transformation formula, the first derivative of a vectorB r as seen from G is
Using the formula again to get the second derivative of the vector B r from G yields
Equation (2.18) is the classical expression for the acceleration of a point in a rotating frame as seen from an inertial frame. The term \(_{BB}^{\quad B}\mathbf{a}\) is the local acceleration of a point in B with respect to the frame itself regardless of the rotation of B in G. The second term \(_{G}^{B}\boldsymbol{\alpha }_{B} \times ^{B}\mathbf{r}\) is called the tangential acceleration as its direction is always tangential to the rotation path. Tangential acceleration term is represented by a vector product of an angular acceleration and a position vector. The third term \(2_{G}^{B}\boldsymbol{\omega }_{B} \times _{B}^{B}\mathbf{v}\) is an acceleration term traditionally named after Coriolis. The Coriolis acceleration term appears from the two different sources: half of the term comes from a local differentiation of \(_{G}^{B}\boldsymbol{\omega }_{B} \times ^{B}\mathbf{r}\), and the other half is from the product of angular velocity and the local linear velocity vector. The Coriolis acceleration in the classical second derivative between two frames is written as twice the vector product of an angular velocity and a linear velocity. The final term in the expression \(_{G}^{B}\boldsymbol{\omega }_{B} \times \left (_{G}^{B}\boldsymbol{\omega }_{B} \times ^{B}\mathbf{r}\right )\) is called the centripetal acceleration as its direction is towards the center of rotation. The centripetal acceleration has the form of a vector product of an angular velocity with another vector product of an angular velocity and a position vector.
2.3 Derivative Transformation Formula in Three Coordinate Frames
The Euler derivative transformation formula is now extended to include a third coordinate frame. Let A, B, and C be three relatively-rotating coordinate frames sharing a same origin as shown in Fig. 2.3.

Three relatively rotating coordinate frames
The first time-derivative of a B-vector in relative to the A-frame is written as
And the first time derivative of the same B-vector in relative to the C-frame is written as
Combining Eqs. (2.19) and (2.20) yields
The resulting equation relates the A-derivative of a B-vector (2.19) and the C-derivative of the same B-vector (2.20) by means of the angular velocity differences between the three coordinate frames. This result also shows that if the relative velocities and angular velocities with respect to one of the three coordinate frames are known, the simple derivative in local frame can be neglected. In another perspective, by introducing an auxiliary coordinate frame, one can forgo altogether the calculation of the vector derivatives in the local coordinate frame.
The extended Euler derivative transformation in three coordinate frames can be generalized as
where □ can be only generic vector.
This formula is called the mixed derivative transformation formula (Jazar 2012). It can be used to relate vector derivatives in three frames by means of angular velocities difference between the three coordinate frames.
2.4 Kinematic Chain Rule
To extend the Euler derivative transformation to account for arbitrary number of moving coordinate frames, we derive the general formula for the composition of multiple angular velocity vectors. This is useful for, but not limited to, a system with a chain of coordinate frames where the motion of one frame is subject to another. One example of such system is depicted in Fig. 2.4.

Multiple coordinate frames system with frame 0 as the inertial frame
Consider now n angular velocities representing a set of \(n\left (n = 1,2,\ldots,n\right )\) non-inertial rotating coordinate frames in an inertial frame indicated by n = 0. Their relative angular velocities satisfy the relation
if and only if they all are expressed in the same coordinate frame, which in this case frame 0. Using the rule, the composition of the angular velocity\(_{0}\boldsymbol{\omega }_{n}\) can be represented in any coordinate frame f in the set.
Equation (2.24) represents the additional rule of the composition of multiple angular velocity vectors. Any equation of angular velocities that has no indication of the coordinate frame in which they are expressed is incomplete and generally incorrect.
Angular acceleration is the first time-derivative of an angular velocity vector. For an angular velocity vector of B with respect to G, for example,
the angular acceleration is defined as
Suppose there are n angular velocity vectors representing a set of n coordinate frames expressed in an arbitrary frame f.
To differentiate the composition of angular velocities, which are expressed in f, from an arbitrary frame g in the set, one has to apply the Euler derivative transformation formula in Eq. (2.16).
where α is defined as the differentiation of ω in its own frame \(^{f}d\,\,^{f}\boldsymbol{\omega }/dt\). The formula provides a method to express the first derivative of a composition of angular velocity vectors.
As an example, let the number of rotating coordinate frames be n = 3. The angular velocity of frame 3 with respect to the inertial frame 0 is written as a composition of three angular velocities, expressed in frame 3.
Applying differentiation from frame 0, using the formula in Eq. (2.29), one obtains
Looking at the third term in the right-hand side, \(_{2}^{3}\boldsymbol{\alpha }_{3}\) is the rate of magnitudinal change of \(_{2}^{3}\boldsymbol{\omega }_{3}\) in frame 3, and \(_{0}^{3}\boldsymbol{\omega }_{3} \times _{2}^{3}\boldsymbol{\omega }_{3}\) is the convective rate of change of \(_{2}^{3}\boldsymbol{\omega }_{3}\) due to its angular velocity of frame 3 with respect to the frame it is differentiated, \(_{0}^{3}\boldsymbol{\omega }_{3}\). The second right-hand side term can be interpreted similarly. The total angular acceleration of frame 1 with respect to frame 0 is only \(_{0}^{3}\boldsymbol{\alpha }_{1}\) as the direction of the angular velocity of frame 1 with respect to frame 0 \(_{0}^{3}\boldsymbol{\omega }_{1}\) does not change in frame from which it is differentiated as \(_{0}^{3}\boldsymbol{\omega }_{1} \times _{0}^{3}\boldsymbol{\omega }_{1} = 0\)
Therefore, any equation of angular acceleration that has no indication of in which coordinate frame they are expressed, or without the convective rate of change term \(\sum \limits _{i=1}^{n}{}_{g}^{f}\boldsymbol{\omega }_{i} \times _{i-1}^{\quad f}\boldsymbol{\omega }_{i}\) is incomplete and generally incorrect.
3 The Razi Acceleration
Jazar (2012) showed that the Razi term appears as a relative acceleration due to transforming vector derivative in multiple reference frames. Here, we show that the Razi term can be exhibited by the same method that the inertial accelerations in a fixed-axis rotation motion are calculated, such as the Coriolis and the centripetal acceleration. We examine the system of three nested coordinate frames—a body-fixed coordinate frame C is rotating in another coordinate frame B, which in turn is rotating in a globally fixed, inertial frame A, with all coordinate frames sharing a common origin. The position vector of a body point C r is expressed in the body frame C and its double derivative, hence the acceleration of the body point, is taken from the inertial frame A. Any resulting acceleration term, apart from the local absolute acceleration \(_{CC}^{\quad C}\mathbf{a}\), that appears from the transformation of the vector derivatives is defined as an inertial acceleration. The derivative transformation between two coordinate frames produces inertial accelerations such as centripetal, Coriolis, and tangential acceleration as shown in Eq. (2.18). We show that nested rotations involving more than two coordinate frames produce more inertial accelerations terms, in which one of them is the Razi acceleration.
3.1 Razi Acceleration in Mixed Acceleration Expression
We reproduce the derivation of the Razi acceleration as shown in Jazar (2011, 2012) as a review. Consider three relatively rotating coordinate frames A, B, and C, where the frame A is considered as a global-fixed frame, while the frame B is rotating in A, and a body frame C is rotating in B. This motion is called compound or nested rotation since the rotation of C is inside the frame B, which in turn is also rotating inside another frame, A. Assume a position vector C r is expressed in its local frame C. Taking the first derivative of C r from the B-frame using the vector derivative transformation formula yields
Taking the derivative of \(\frac{{}^{B}d} {dt} {{}^{C}\mathbf{r}}\) from the A-frame now yields
From the expression, the mixed acceleration expression contains the local acceleration term \(_{CC}^{\quad C}\mathbf{a}\); two acceleration terms that have the Coriolis form of a product of an angular velocity and a linear velocity, which are \(_{A}^{C}\boldsymbol{\omega }_{C} \times _{C}^{C}\mathbf{v}\) and \(_{B}^{C}\boldsymbol{\omega }_{C} \times _{C}^{C}\mathbf{v}\); the tangential acceleration term \(_{B}^{C}\boldsymbol{\alpha }_{C} \times ^{C}\mathbf{r}\); and a mixed centripetal acceleration term \(_{B}^{C}\boldsymbol{\omega }_{C} \times \left (_{A}^{C}\boldsymbol{\omega }_{C} \times ^{C}\mathbf{r}\right )\).
The term \(\left (_{A}^{C}\boldsymbol{\omega }_{C} \times _{B}^{C}\boldsymbol{\omega }_{C}\right ) \times ^{C}\mathbf{r}\) is the Razi acceleration. Note the difference between the Razi acceleration and the mixed centripetal acceleration is the order of cross product. This indicates that when a coordinate body frame is rotating relative to other two rotating coordinate frame, the mixed double derivative ofC r contains these inertial acceleration terms: mixed Coriolis acceleration, tangential acceleration, mixed centripetal acceleration, and the Razi acceleration. An application example of mixed derivative transformation formula with this Razi acceleration is illustrated on Jazar (2012, pp. 858–864).
However, the dynamical interpretation of the mixed acceleration is not clear. In practice, the double derivative of a position vector is usually directly transformed from the local frame to the inertial frame without undergoing a mid-frame differentiation. The reason is that a double-differentiation of a point position in a rotating frame from the inertial frame gives the additional acceleration terms, which contribute to inertial effect such as centrifugal and Coriolis forces. In mixed acceleration, in contrast, the differentiation is taken from two different frames. The mixed acceleration \(_{AB}^{\quad C}\mathbf{a} = \frac{{}^{A}d} {dt} {{}_{B}^{C}\mathbf{v}}\) can be used to complement the acceleration of a point in C from B using the mixed derivative transformation formula in Eq. (2.22).
Next, we show that if there are more than one nested rotation, the Razi acceleration would appear even when the vector derivative is transformed directly from the local frame to the inertial frame without using the mixed acceleration technique.
3.2 Razi Acceleration as an Inertial Acceleration
The derivation of the Razi acceleration here uses the Euler derivative transformation formula in conjunction with the kinematic chain rule. It differs from the mixed acceleration method in such a way that the both derivatives of a body point in a local coordinate frame are taken from the inertial frame, the same way the Coriolis, centripetal, and tangential accelerations are derived. To demonstrate, consider a two coordinate frames system with G as the global-fixed inertial frame and B as the rotating body-fixed frame. Since the relative rotation between the two frames can be represented by one angular velocity \(_{G}\boldsymbol{\omega }_{B}\), we can use Eq. (2.16) twice to find the double derivative of a body-fixed position vector \(^{B}\mathbf{r}\) from the inertial frame G. Looking at the resulting expression of the acceleration in two frames, shown in Eq. (2.18), one can separate the acceleration terms as follows
Now, consider a slightly complex case of nested rotations. Consider three relatively rotating frames A, B, and C where the A-frame is treated as the inertial frame, the B-frame is rotating in A, and the C-frame, which is the body-fixed frame, is rotating in B. The motion of a rigid body which is spinning in one or more rotating coordinate frames is called compound rotation or nested rotation. Compound rotation is usually seen in the gyroscopic motion, or the precession and nutation of a rigid body. To express the velocity of a point in C as seen from the inertial frame, the Euler derivative transformation formula in (2.16) is invoked to transform the velocity from the local frame C to the inertial frame A
Since, the frame C is in B, and the frame B is in A, the angular velocity \(_{A}^{C}\boldsymbol{\omega }_{C}\) can be expanded using the angular velocity addition rule from Eq. (2.24).
The expression of the acceleration of a point in C from the inertial frame can be expressed as
The angular velocity derivative \(\frac{{}^{A}d} {dt} {{}_{A}^{C}\omega} _{ C}\) can be expanded using the rule of addition for angular acceleration in (2.29) with n = 2
The expanded expression of the acceleration of a point in C from the inertial frame now becomes
One can now list the acceleration terms expressed in local frame C and include the Razi term
The Razi acceleration \(\left (_{A}^{C}\omega _{C} \times _{A}^{C}\omega _{B}\right ) \times ^{C}\mathbf{r}\) comes from differentiating the composition of angular velocity vectors from a different frame as shown in Eq. (2.41). Next, we show that for the case of n > 2 nested rotating frames, Razi acceleration terms appear in the equation of motion.
It is important to note that the Razi acceleration can only appear in compound rotation motion. A rigid body in a rotation about a fixed axis does not experience an inertial force caused by the Razi acceleration. This is because a rotation about a fixed axis can always be simplified to a two coordinate frames system. In such case the Razi acceleration vanishes as there is only one angular velocity, making \(_{A}\boldsymbol{\omega }_{B} \times _{A}\boldsymbol{\omega }_{B} = 0\).
3.3 Acceleration Transformation in Multiple Coordinate Frames with a Common Origin
Given a set of n non-inertial rotating coordinate frames in nested rotations with \(_{i-1}\boldsymbol{\omega }_{i}\) representing the angular velocity of i-th coordinate frame with respect to the preceding coordinate frame, we present the general expression for the acceleration (the double derivative of a vector) of the n-th coordinate frame as seen from the inertial coordinate frame 0.
where
The general expressions for acceleration when a position vector in a local frame is differentiated twice from the inertial frame are shown in Table 2.1. Examples are given for up to a five coordinate frames system. The frame A is dedicated to the inertial frame and the successive relatively rotating frames are named B, C, and so on, with the last letter indicates the local coordinate frame. For example, in a system of three coordinate frames, A is the inertial frame, B is the intermediate frame, and C is the local frame. All vectors are expressed in the local coordinate frame as indicated by the left superscript on each vector. Addition of angular acceleration vectors is simplified as \(_{0}^{n}\boldsymbol{\alpha }_{n} \equiv \sum \limits _{i=1}^{n}{}_{i0}^{n}\boldsymbol{\alpha }_{i}\).
The resulting acceleration expression in Table 2.1 shows that if a rigid body moves linearly with respect to an inertial space, its motion can be sufficiently described by a linear acceleration vector \(^{A}\mathbf{a}\). When a rotating reference frame is introduced and the motion is described in this frame, the additional acceleration terms—centripetal, Coriolis, and tangential accelerations—act as “supplementary” accelerations to describe the motion in a rotating reference frame. When another rotating frame is introduced in the existing rotating frame making a three coordinate frames system, the expression adds another acceleration term: the Razi accelerations. As more coordinate frames are introduced in the nested rotating frames system, the acceleration expressions becomes more complex to accommodate the relative motion between the coordinate frames. In general, Eq. (2.44) includes all of the relative accelerations acting on a rigid body in compound motion which are otherwise unobservable with the classical derivative kinematics method and not intuitive to the analyst.
4 Mechanical Interpretation of the Razi Acceleration
Classical dynamics asserts that there exists a rigid frame of reference in which Newton’s second law of motion is valid. Assuming the mass is constant at all times, the law of motion is written as
where m indicates a mass scalar and a represents the acceleration vector. The reference frame in which this relationship is valid is called an inertial frame. An inertial frame is fixed in space, or at most, moves in relation to fixed points in space with a constant velocity. On the other hand, a non-inertial reference frame can be defined as a frame which accelerates with respect to the inertially fixed points. The calculation of motion observed from a non-inertial reference frame does not follow Newton’s second law due to the relative acceleration between the observer’s frame and the inertial frame.
Starting from an inertial frame, the method of derivative kinematics is used to calculate and transform the vector derivatives to the non-inertial observer. Such transformation produces additional acceleration terms to the Newton’s law in Eq. (2.46). For the classical case of one stationary inertial frame and a body frame which rotates about a fixed axis, these additional acceleration terms are generally divided into tangential acceleration, Coriolis acceleration, and centripetal acceleration, as shown in the expression in Eq. (2.18).
Multiplying the acceleration terms with mass gives the expression of the forces that is acting on a point mass in the rotating coordinate frame.
In the case of multiple nested coordinate frames, the classical method of transforming derivative between two frames is limiting. This method is sufficient for any motion consideration in two-dimensional space, due to the assumption that the direction of a rigid body’s angular velocity is fixed with respect to the inertial frame at all time. However, a general formula for a three-dimensional space is needed to account for the subtle accelerations due to a non-constant angular velocity.
The derivative transformation method can be extended to include the effects of moving angular velocities. To do this, the complex rotation caused by the non-constant angular velocity vector is decomposed into several simpler coordinate frame representation such that each coordinate frame then will have a fixed-axis angular velocity vector. Such technique results on multiple coordinate frames in nested rotations. To analyze such system, we incorporate the extended derivative transformation formula and the kinematic chain rule, which method reveals new results and application.
For the case of three coordinate frames system (two nested rotating frames in an inertial frame), we have seen that the acceleration expression includes a new rotational inertia called which is the Razi acceleration. We also have shown the general expression for all four inertial acceleration—tangential, Coriolis, centripetal, and Razi—for an arbitrary number of nested rotating frames.
Extending the derivative transformation formula and incorporating the kinematic chain rule reveal several new results and applications. The Razi acceleration is given a focus due to its appearance as one of the additional acceleration terms in the system of more than two coordinate frames.
We take the simplest case of the Razi acceleration where there are three nested coordinate frames—A, B, and C—sharing an origin with the body coordinate frame C being the “innermost” frame. Such system can be better illustrated by a flat disc in compound rotation motion, as shown in Fig. 2.5. We fix the C coordinate frame in the disc, which is spinning on its own axis with an angular speed \(\dot{\theta }\) and tilted on a turning shaft by ψ degrees. We fix the B coordinate frame on the shaft, which is turning with respect to the global-fixed frame with an angular speed \(\dot{\phi }\). The two angular velocities can be written as \(_{B}\boldsymbol{\omega }_{C} =\dot{\theta }\hat{\imath}\) and \(_{A}\boldsymbol{\omega }_{B} =\dot{\phi }\hat{\jmath}\).

Describing compound rotation motion using three coordinate frames system
The total acceleration acting on a point r on the disc, as seen from the inertial frame, can be expressed by Eq. (2.42). Decomposing the expression into multiple terms, the Razi acceleration, if expressed in the local body coordinates of C, is written as
The cross product of two angular velocities \(_{A}^{C}\boldsymbol{\omega }_{C} \times _{B}^{C}\boldsymbol{\omega }_{C}\) is the convective rate of change of \(_{B}\boldsymbol{\omega }_{C}\) due to the angular velocity of C in A, \(_{A}\boldsymbol{\omega }_{C}\). Therefore, the Razi acceleration can be described as an inertial effect caused by the change of the local angular velocity vector direction. This is separable from the tangential direction which is due to the change of an angular velocity magnitude, hence producing acceleration in the direction which is tangent to the rotation curve.
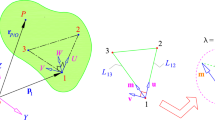
To examine the direction of action of the Razi acceleration, we visualize the resulting vectors in Fig. 2.6. Assuming the position vector of the point of interest r is constant in C. Since the angular velocity of C in A can be decomposed using the addition rule, i.e. \(_{A}^{C}\boldsymbol{\omega }_{C} = _{A}^{C}\boldsymbol{\omega }_{B} + _{B}^{C}\boldsymbol{\omega }_{C}\), the Razi acceleration is written as
The total acceleration, thus, can be expressed as
In Fig. 2.6, the total acceleration vector of a body point in C is decomposed into the centripetal acceleration vector \(_{A}^{C}\boldsymbol{\omega }_{C} \times (_{A}^{C}\boldsymbol{\omega }_{C} \times ^{C}\mathbf{r})\) and the Razi acceleration vector \(\left (_{A}^{C}\omega _{B} \times _{B}^{C}\omega _{C}\right ) \times ^{C}\mathbf{r}\). Using the disc to represent the plane of rotation of the C-frame, we can see the resultant vector of the Razi acceleration is always in the out-of-plane direction. This can be tested by finding the direction of the cross products in the Razi term using the right-hand rule.

Razi acceleration vector
Apart from the magnitudes of A C ω B , B C ω C , andC r, the magnitude of the Razi acceleration vector depends on the angle between the two angular velocity vectors, ψ. Figures 2.7, 2.8, 2.9, 2.10, 2.11, 2.12 show the magnitudes of Razi and centripetal acceleration experienced by the body pointC r in the example. The plots show the effect of ψ to the magnitude of Razi acceleration for different combinations of angular velocities. Since most readers are more familiar with the centripetal acceleration effect and its influence on bodies under rotation, we compare its magnitude with the magnitude of Razi acceleration.

\(_{A}^{B}\omega _{B} =\dot{\phi }= 5\,\mathrm{rad/s}\); \(_{B}^{C}\omega _{C} =\dot{\theta }= 1\,\mathrm{rad/s}\)

\(_{A}^{B}\omega _{B} =\dot{\phi }= 4\,\mathrm{rad/s}\); \(_{B}^{C}\omega _{C} =\dot{\theta }= 2\,\mathrm{rad/s}\)

\(_{A}^{B}\omega _{B} =\dot{\phi }= 3\,\mathrm{rad/s}\); \(_{B}^{C}\omega _{C} =\dot{\theta }= 3\,\mathrm{rad/s}\)

\(_{A}^{B}\omega _{B} =\dot{\phi }= 2\,\mathrm{rad/s}\); \(_{B}^{C}\omega _{C} =\dot{\theta }= 4\,\mathrm{rad/s}\)

\(_{A}^{B}\omega _{B} =\dot{\phi }= 1\,\mathrm{rad/s}\); \(_{B}^{C}\omega _{C} =\dot{\theta }= 5\,\mathrm{rad/s}\)

\(_{A}^{B}\omega _{B} =\dot{\phi }= 5\,\mathrm{rad/s}\); \(_{B}^{C}\omega _{C} =\dot{\theta }= 0\,\mathrm{rad/s}\)
5 Conclusion
By revising and extending the classical Euler vector derivative transformation formula, we update the interpretation of the Razi acceleration and reveal its application in rigid body motion. The Razi acceleration is revealed as one of the inertial effects, apart from the classical Coriolis, centripetal, and tangential accelerations, affecting rigid bodies in compound rotation motion. It is shown to appear as a result of the convective rate of change of a body-frame’s angular velocity in nested rotation. Razi’s mathematical expression, \(\sum \limits _{i=1}^{n}\left (_{0}^{n}\boldsymbol{\omega }_{i} \times _{i-1}^{\quad n}\boldsymbol{\omega }_{i}\right ) \times ^{n}\mathbf{r}\), can only be discovered by using multiple coordinate frames in analyzing the kinematics of complexly rotating bodies. A practical example is illustrated to show the typical direction of action of Razi acceleration. Its magnitude is compared to the more widely acknowledged centripetal acceleration to show that the Razi acceleration can have a significant impact to the structures of a body in compound rotation.
References
Baruh H (1999) Analytical dynamics. WCB/McGraw-Hill, Boston
Jazar RN (2012) Derivative and coordinate frames Nonlinear Eng 1(1):25–34
Jazar RN (2011) Advanced dynamics: rigid body, multibody, and aerospace applications. Wiley, Hoboken, pp 858–864
Kane TR, Likins PW, Levinson DA (1983) Spacecraft dynamics. McGraw-Hill, New York, pp 1–90
Kasdin NJ, Paley DA (2011) Engineering dynamics: a comprehensive introduction. Princeton University Press, Princeton
Koetsier T (2007) Euler and kinematics. Stud Hist Philos Math 5:167–194
Rao A (2006) Dynamics of particles and rigid bodies: a systematic approach. Cambridge University Press, Cambridge
Tenenbaum RA (2004) Fundamentals of applied dynamics. Springer, New York
Van Der Ha JC, Shuster MD (2009) A tutorial on vectors and attitude (Focus on Education). Control Syst IEEE 29(2):94–107
Zipfel PH (2000) Modeling and simulation of aerospace vehicle dynamics. AIAA, Virginia
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Appendices
Appendix 1: Alternative Proof of Derivative Transformation Formula
Angular velocity can be defined in terms of time-derivative of rotation matrix. Consider the two coordinate frames system as shown in Fig. 2.2. The angular velocity of B in relative to G, \(_{G}\boldsymbol{\omega }_{B}\) is written as follows
To prove Eq. (2.52), we start with the relation between a vector expressed in two arbitrary coordinate frames G and B.
Finding the derivative of the G-vector from G, we get
Here, it is assumed that the vectorB r is constant in B. If it is not constant, we have to include the simple derivative of the vector in B and rotate it to G
The angular velocities between two arbitrary frames are equal and oppositely directed given that both are expressed in the same frame
Using this angular velocity property, rearranging Eq. (2.54) gives
Appendix 2: Proof of the Kinematic Chain Rule for Angular Acceleration Vectors
To prove Eq. (2.29), we start with a composition of n angular velocity vectors which are all expressed in an arbitrary frame g.
We use the technique of differentiating from another frame in Appendix 1. Differentiating the angular velocities from an arbitrary frame g gives
The whole expression can be transformed to any arbitrary frame f by applying the rotation matrix from g to f,f R g .
2.1 Notations
In this article, the following symbols and notations are being used. Lowercase bold letters are used to indicate a vector. Dot accents on a vector indicate that is a time-derivative of the vector.
-
r, v (or \(\dot{\mathbf{r}}\)), and a (or \(\ddot{\mathbf{r}}\)) are the position, velocity, and acceleration vectors
-
\(\boldsymbol{\omega }\) and \(\boldsymbol{\alpha }\) (or \(\dot{\boldsymbol{\omega }}\)) are angular velocity and angular acceleration vectors.
Capital letter A, B, C, and G are used to denote a reference frame. In examples where only B and G are used, the former indicates a rotating, body coordinate frame and the latter indicates the global-fixed, inertial body frame. When a reference frame is introduced, its origin point and three basis vectors are indicated. For example:
Capital letters R is reserved for rotation matrix and transformation matrix. The right subscript on a rotation matrix indicates its departure frame, and the left superscript indicates its destination frame. For example:
Left superscript is used to denote the coordinate frame in which the vector is expressed. For example, if a vector r is expressed in an arbitrary coordinate frame A which has the basis vector \((\hat{\imath},\hat{\jmath},\hat{k})\), it is written as
Left subscript is used to denote the coordinate frame from which the vector is differentiated. For example,
Right subscript is used to denote the coordinate frame to which the vector is referred, and left subscript is the coordinate frame to which it is related. For example, the angular velocity of frame A with respect to frame B is written as
If the coordinate frame in which the angular velocity is expressed is specified
Key Symbols
- \(\mathbf{a =}\ddot{\mathbf{r}}\) :
-
Acceleration vector
- \(\mathbf{v =}\dot{\mathbf{r}}\) :
-
Velocity vector
- r :
-
Displacement vector
- α :
-
Angular acceleration vector
- ω :
-
Angular velocity vector
- F :
-
Force vector
- m :
-
Mass scalar
- n :
-
Number of elements in the set of noninertial coordinate frames
- i :
-
ith element in a set
- f, g :
-
Elements in the set of noninertial coordinate frames
- \(\hat{I},\hat{J},\hat{K}\) :
-
Orthonormal unit vectors of an inertial frame
- \(\hat{\imath},\hat{\jmath},\hat{k}\) :
-
Orthonormal unit vectors of a noninertial frame
- O :
-
Origin point of a coordinate frame
- \(\dot{\theta }\) :
-
Angular speed of body (spin)
- \(\dot{\phi }\) :
-
Angular speed of body (precession)
- ψ :
-
Nutation angle, angle between spin vector and precession vector
- R :
-
Rotation transformation matrix
- □ :
-
Arbitrary vector
- A r :
-
Vector r expressed in A-frame
- \(_{B}^{A}\mathbf{\dot{r}}\) :
-
Vector \(\dot{\mathbf{r}}\) expressed in A-frame and differentiated in B-frame
- \(_{CB}^{\,\,\,\,A}\mathbf{\dot{r}}\) :
-
Vector \(\ddot{\mathbf{r}}\) expressed in A-frame, first-differentiated in B-frame, and second-differentiated from C-frame
- A R B :
-
Rotation transformation matrix from B-frame to A-frame
Rights and permissions
Copyright information
© 2015 Springer International Publishing Switzerland
About this chapter
Cite this chapter
Harithuddin, A.S.M., Trivailo, P.M., Jazar, R.N. (2015). On the Razi Acceleration. In: Dai, L., Jazar, R. (eds) Nonlinear Approaches in Engineering Applications. Springer, Cham. https://doi.org/10.1007/978-3-319-09462-5_2
Download citation
DOI: https://doi.org/10.1007/978-3-319-09462-5_2
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-09461-8
Online ISBN: 978-3-319-09462-5
eBook Packages: EngineeringEngineering (R0)