
Abstract
In this paper, the experimental results of a MEMS resonator with hard-spring response are shown. Under specific excitation conditions, the resonator shows an extension of the hysteresis during upsweep and downsweep of the excitation frequency. The extension of the hysteresis can be tuned by changing the excitation voltage. Sensitivity in regards to change in excitation conditions including ac voltage, dc bias, and pressure is demonstrated. Furthermore a unidirectionally coupled system consisting of the above nonlinear resonators is also characterized.
Access provided by Autonomous University of Puebla. Download chapter PDF
Similar content being viewed by others


Keywords
- Coupling Strength
- Excitation Signal
- Micro Electro Mechanical System
- Excitation Voltage
- Nonlinear Resonance
These keywords were added by machine and not by the authors. This process is experimental and the keywords may be updated as the learning algorithm improves.
1 Introduction
Micromechanical devices provide ample opportunities to explore rich dynamical behaviors including synchronization. MEMS devices can exhibit many nonlinear behaviors including the hard-spring effect and the soft-spring effect. Along with ac excitation voltage and bias, actuation mechanisms such as parallel plate comb-drive or laterally driven comb-drive determine whether soft-spring or hard-spring behavior is exhibited. Furthermore a closed-loop coupled nonlinear system can offer additional advantages including self-excited oscillations and synchronization to an excitation signal. In this paper the experimental results of synchronization in an electronically coupled system of Micro Electro Mechanical System (MEMS) resonators with hysteresis in frequency-domain are entailed.
2 Single Nonlinear Resonator
Figure 1 illustrates a laterally driven comb-drive resonator that was fabricated in SOIMUMPs process [1]. The resonator consists of a perforated mass suspended by folded springs. The springs are attached to the truss. The device is designed to be symmetric in x and y axes to provide stable oscillations. Usually the device is biased at a dc voltage. By applying ac voltage between the comb fingers attached to the mass and the fixed electrode (either left or right electrode in Fig. 1), a time varying electrostatic force is generated which makes the mass vibrate in the x-direction. Typically the motional current, which is proportional to the change in the capacitance between the comb fingers and the excitation voltage, is measured. The vibration in this type of resonator will be only in the x-direction due to two design features: folded flexure and thickness of the structure. These features reduce the axial stress and restrict the out-of-plane movement thereby minimizing unstable and unwanted vibrations in the other axes [2]. Also small dimples were placed to avoid the stiction between the long comb-fingers with small gap.

Comb-drive resonator fabricated in SOIMUMPs process: note the difference between the lengths of the inner beam and outer beam within a pair of folded beams
2.1 Design and Fabrication
The devices were fabricated in a SOIMUMPs process. SOIMUMPs is a simple Silicon-On-Insulator (SOI) patterning and etching process offered by Memscap, Inc. The end result is a 25 \(\upmu \)m thick doped Silicon as the structural layer which is patterned and etched on a 400 \(\upmu \)m thick Silicon substrate with 2 \(\upmu \)m thick Oxide as the insulating layer [1]. The substrate underneath the structure is completely removed in a back-etch which reduces parasitic capacitances and damping. The Pad Metal layer is used for the bond-pads for excitation and detection. The folded beam design reduces axial stress components present in a single beam and extends the stroke in the intended direction of motion. Each end of the folded beam pair (total of four pairs) is free to expand and contract in all directions. The resonating mass is suspended by flexures on four sides; the total stiffness of the entire structure in a given direction can be verified by running a modal analysis in FEA software. The frequency associated with the fundamental mode is 9681.43 Hz. The truss reduces motion in the y-axis in this mode. The analysis of the other modes reveals that the frequencies corresponding to the other two modes are farther away from the fundamental frequency. These two frequencies are due to the torsional and lateral modes that can be present in the suspension beams. Springs are made to be long and narrow and are terminated with fillets to minimize breakage. The design presented in this chapter is comprised of the folded beams with outer fold. The inner beams were designed to be slightly longer than the outer beams as shown in Fig. 1. This creates a ratio between the inner beam (IB) and outer beam (OB) and introduces an asymmetry. With \({\mathrm {L_{OB}}} = 306\,\upmu \mathrm{{m}}\) and \({\mathrm {L_{IB}}} = 336\, \upmu \mathrm{{m}},\,{\mathrm {k_{OB}/k_{IB} = L_{IB}^3/L_{OB}^3}} = 1.32\).
2.2 Nonlinearity
Nonlinearity in the MEMS devices can appear due to large vibrations, residual stress, variation in the individual elements, contact with other elements, circuit elements, and/or a combination of all of the above. Typically the nonlinearity in MEMS is categorized as soft-spring effect and hard-spring effect. In the soft-spring effect the springs soften, that is the restoring force decreases as the displacement increases. On the other hand the hard-spring effect is characterized by an increase in the restoring force with increasing displacement. The actuation mechanism plays a major role in which type of behavior is exhibited. For example, parallel plate actuation generates a strong dependence on the bias in the applied force value; it effects the linear spring constant term by reducing it. At high dc bias the effective linear spring constant term becomes negative and the device exhibits soft-spring effect. On the other hand, hard-spring behavior can occur in a laterally driven comb-drive when it is driven by large force. In either case, the primary cause of the nonlinearity is the deformation of material. Usually linear displacement occurs in the first lateral mode when small force is applied at the tip of the beam. In this mode, the springs go through large deformation in the presence of a large force which can result in the nonlinear restoring force.
3 Experimental Results
Measurements were performed on Agilent 4,294A impedance analyzer on resonators fabricated on separate dies and single die. The left electrode was connected to the high port, the anchor pad (resonating structure) was connected to the low port, and the right electrode was connected to the ground. From the equivalent circuit model of a resonator, the impedance analyzer can display the real part containing a purely mechanical term plus an offset attributed by a purely capacitive term and the imaginary part containing purely capacitive terms. In the linear operation, the quality factor \(Q\) was measured as 4,640, 5,540, 4,026 for three different resonators on separate dies. For this measurement, the resonators were excited with a dc bias of 20 V, an ac amplitude of 25 mV, and the pressure inside the vacuum chamber was set to 30 Pa.
3.1 Change in Excitation Conditions
In this section, the frequency responses of the resonator while changing excitation conditions including ac voltage, bias, and pressure are briefly discussed.

Change in excitation conditions (note that downsweep responses are not shown for clarity and only the real parts of the frequency responses are shown to illustrate the mechanical behavior): a ac amplitude = [45, 105, 170, 205 mV], bias = 20 V, and pressure = 30 Pa, b bias = [10, 16.2, 20 V], ac amplitude = 205 mV, and pressure = 30 Pa, c pressure = [15, 30, 50 Pa] with ac excitation amplitude = 205 mV and bias = 20 V
AC Voltage
Figure 2 shows the upsweep frequency responses of the resonator. For the purpose of clarity, the downsweep responses are not shown. However it was observed that less than 5 Hz variation existed during the downsweep in all three resonators. As shown in Fig. 2, the resonators show a typical hard-spring response up to a certain value of the ac voltage after which the response extends to a higher value of frequency. As shown in Fig. 2a, the approximate value of the ac excitation amplitude at which the extension occurs is 170 mV. The frequency at which the extension in a given resonator occurs at higher excitation amplitudes is nearly identical, as was observed in all resonators. Another important observation is that during the upsweep, the resonators show slight ringing in the middle of the curve as shown in Fig. 2a. The resonator seems to have gone through more bifurcations which help continue the upsweep response. The springs can maintain a stable vibration up to only a certain frequency, after which it drops to a lower value such that the restoring force in the springs can maintain an equilibrium with the excitation force. Also note that within the extended hysteresis region the coexistence of two vibrational amplitudes indicates a better control and predictability for switching the resonator between the two states. However the mechanism for the extended hysteresis (see Sect. 3.2) depends on the interplay between outer beam and inner beam which should be carefully controlled. This feature is crucial in facilitating multiple bifurcations in the resonator and thereby extending the response. It is worthy to note that by increasing ac voltage, the folded beam pairs exhibit large displacement which leads to large deformation as the beams harden. Hence the overall nonlinear spring constant increases when ac voltage is increased and as a result the responses do not overlap before the extended region for small values of ac voltage.
Bias
While changing the bias, the behavior is qualitatively similar as shown in Fig. 2b. Here the electrostatic force increases significantly while incrementing the bias voltage. This is due to an increase in the steady-state capacitance between the comb fingers. The resonators display the nonlinear resonance at a low bias value. Also it is important to note that the extension of the hysteresis depends more on the bias voltage than the ac excitation amplitude. For example, a high ac excitation amplitude with a low bias does not always induce the extended hysteresis. As mentioned in the previous section, the frequency at which the extension occurs was observed to be identical while increasing the bias value. The effect of increasing bias is that it changes the equilibrium position of the resonator around which the folded beam pairs resonate in the presence of the ac voltage. Hence the change in dc does not significantly increase the overall nonlinear spring constant which results in overlapping of the frequency response in the lower frequency range.
Pressure
The effect of changing pressure is that it influences the molecular resonance in the material and as a result the motional resistance exhibited by the device increases with an increase in the pressure. For example, the experiments conducted on a device in the air showed only the linear resonance due to high damping. Bias \(>\) 60 V and ac amplitude = 1 V were required to produce any motion in the device. In air the device was not tested at an excitation value higher than the above value lest it may break. Hence a clear nonlinear resonance and extension of the hysteresis were not observed. However in the vacuum starting at 100 Pa, the devices exhibited a distinct nonlinear resonance similar to the one shown in previous sections due to the low damping. To compare the influence of pressure and the damping, devices were tested at 50, 30 and 15 Pa. Figure 2c shows that at all pressure values, the nonlinear resonance occurs at approximately the same frequency point. This type of ringing was observed more or less in all resonators. Note that this behavior may have been induced by additional bifurcations. The mechanism behind these bifurcations can be attributed to the interaction of the outer beams with the inner beams thereby sustaining the vibrations. Finally it is important to note that while varying the pressure, the temperature change inside the chamber was not monitored or considered. Temperature can affect the molecular resistance and the damping such that some of the qualitative behavior would change.
3.2 Mechanism for the Extended Nonlinear Resonance
The causes of the nonlinear behavior shown in the above sections are as follows. As the structure resonates, the inner beams and outer beams shown in Fig. 1 expand and compress together (vice versa in the other direction). Normally this helps extend the linear range of the resonator. Also the compliance in the truss can partially relieve the axial compression. However the long and narrow beams can be axially loaded when they experience a large electrostatic force during the peak resonance [2]. As a result the inner beams develop higher modes of vibration due to high tensile force to maintain equilibrium. Additionally the outer beams are designed to be stiffer than the inner beams with a ratio of 1.32; hence they tend to compress less. This type of nonuniform stress distribution in the inner and outer beams can cause more hardening. Also note the location of the four beams on the truss; the distance between the inner and outer beam in a given pair and the distance between two given pairs are not equal. Additionally the outer beams can also be axially loaded and can exhibit a higher mode of vibration as a result of the nonuniform expansion and contraction. All these conditions can cause the mass to sustain the vibrations as the frequency is swept past the resonance frequency and as a result the extension of hysteresis can occur. The mechanism behind hysteresis and extended hysteresis has already been discussed in detail in one of our papers [3].
4 Coupled Resonators
The coupled experiment was performed by using three resonators on a single die (referred to as Res 1, Res 2, Res 3 from now on). The test die was attached by non-conductive epoxy in the center of the device PCB and devices were wire-bonded to the pcb traces using gold wires with diameter \(= 25\,\upmu \)m. The motional current produced by the device was read off the anchor pad. The substrate, the pcb, and the vacuum chamber were also grounded to reduce parasitic capacitances. The experiments were conducted on a motion resistant test-bench to dampen the ambient vibrations. The three resonators on a single die were coupled together by discrete electronics such that they form a closed-loop system, i.e. \(1\,\rightarrow \,2\,\rightarrow \,3\,\rightarrow \,1\).

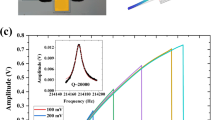
The coupled system with a priori in-phase vibrations in the presence of ac excitation signal: region of synchronization is shown where x-axis denotes the frequency of the excitation signal and y-axis denotes the peak-to-peak voltage level of excitation signal. Outside of the sync region, the oscillations are quasiperiodic as shown in the insets
4.1 Self Excitations
In this experiment the devices were biased using a dc power supply. As mentioned previously, the bias voltage plays a role of shifting the equilibrium position of the resonator. If a resonator is in steady-state and the bias is applied suddenly, the resonator changes its steady-state or the equilibrium value (in the single well potential) after some transient behavior induced by the noise in the circuit. Hence without the bias the initial positions of the resonators are identical before applying an excitation signal. Footnote 1 The output of a given resonator was fed to current-to-voltage (I-V) converter which was connected to an amplifier with a variable gain which can tune the overall coupling strength between the resonators. The output of the coupling amplifier was then connected to the next element in the ring. Next a bias of 20 V was applied simultaneously on all the resonators. After that, the resonators were self-excited by adjusting the gains of the coupling amplifiers. The inherent noise vibrations in the circuit components act as the excitation signals to the resonators. The noise induced vibrations are amplified by the coupling amplifiers. In this way the noise is fed from the one element to the next element in the loop and thus each element drives the other element with this noise. As the noise in the system traverses around the loop, the resonators start to vibrate first arbitrarily and then by responding to the mechanism of self-organized synchronization induced by the coupling strengths past the critical values. Eventually at a sufficiently large vibration the resonators fully synchronize with each other, as a result as the signal-to-noise ratio gets higher and stable sinusoidal vibrations emerge depending on the coupling strengths. The shared frequency of oscillation is approximately 9 kHz and the amplitude levels are 2.12 V for Res 1, 0.68 for Res 2, and 1.86 V for Res 3. While tuning the coupling strengths, a narrow range of frequencies was observed in which stable vibrations occur. The frequency and the amplitude of the vibrations increase as the coupling strengths are carefully matched and increased. Other combinations of the coupling produce unstable (quasiperiodic) vibrations.
4.2 Synchronization with the AC Excitation Signal
In this experiment, the ac excitation with dc bias was connected to the input ports of the coupled system via a bias-tee network. The 1:1 region of synchronization is shown in Fig. 3, inside which the frequency of the coupled system was observed to be the same as the excitation frequency. Unstable (quasiperiodic) oscillations were observed outside of the boundaries. It was observed that the region of synchronization can shrink, widen, or shift by changing coupling strengths which impact the self-excited frequencies and the amplitude levels. The influence of large nonlinearity is also evident by the curved boundaries. For excitation amplitude less than 100 mV, the vibrations were observed to be unstable with substantial quasiperiodicity. It is possible for this region to be closed depending on damping and the noise in the circuit. For example, at the pressure of 15 Pa the same coupled system shows a wider area below 100 mV.
5 Summary
In this paper, the experimental results of nonlinear MEMS resonators were reported. It was shown that the variation in the excitation voltage affects the frequency response significantly. An extension of the hysteresis and thus an enlargement of usable amplitude bandwidth were observed. The unidirectionally coupled system exhibited stable self-excited oscillations depending on the coupling strengths and it also synchronized to the excitation signal. The experimental study shown in this paper indicates that the coupled system has a strong potential as a sensor depending on the applications.
Notes
- 1.
Here we assume that the fabrication process has no/very little effect on the initial positions of the resonators.
References
A. Cowen, G. Hames, D. Monk, S. Wilcenski, B. Hardy, Soimumps Design Handbook Revision 6.0 (MEMSCAP Inc., Durham, 2009)
C. Acar, A. Shkel, MEMS Vibratory Gyroscopes (Springer Science+Business Media, New York, 2009)
S. Naik, T. Hikihara, Characterization of a mems resonator with extended hysteresis. IEICE Electron. Expr. 8(5), 291–298 (2011)
Acknowledgments
This work was supported in part by Global Center of Excellence (GCOE) program at Kyoto University, Kyoto Environmental Nanotechnology Cluster, Regional Innovation Cluster Program 2010, and Ministry of Education, Culture, Sports, Science and Technology (MEXT). The authors would like to acknowledge valuable help and advice from Dr. Patrick Longhini (SSC-Pacific), Dr. Huy Vu (San Diego State University), Dr. Antonio Palacios (San Diego State University), and Dr. Visarath In (SSC-Pacific).
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2014 Springer International Publishing Switzerland
About this chapter
Cite this chapter
Naik, S., Hikihara, T. (2014). Synchronization in Coupled MEMS Resonators. In: In, V., Palacios, A., Longhini, P. (eds) International Conference on Theory and Application in Nonlinear Dynamics (ICAND 2012). Understanding Complex Systems. Springer, Cham. https://doi.org/10.1007/978-3-319-02925-2_31
Download citation
DOI: https://doi.org/10.1007/978-3-319-02925-2_31
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-02924-5
Online ISBN: 978-3-319-02925-2
eBook Packages: Physics and AstronomyPhysics and Astronomy (R0)