
Abstract
The theory of micropolar thermoelasticity has many applications. One form of the recent years concerning the problem of propagation of thermal waves at finite speed and the possibility of “second sound” effects established a new thermo mechanical theory of deformable media that uses a general entropy balance as postulated and the theory is illustrated in detail in the context of flow of heat in a rigid solid, with particular reference to the propagation of thermal waves at finite speed. Then theory of thermoelasticity for non-polar bodies, based on the new procedures, was discussed and employed the eigen value approach to study the effect of rotation and relaxation time in two dimensional problem of generalized thermoelasticity. Recently investigation shows the dynamic response of a homogeneous, isotropic, generalized thermoelastic half-space with voids subjected to normal, tangential force and thermal stress. In this paper we introduce the eigen value approach, following Laplace and Fourier transformation has been employed to find the general solution of the field equation in a micropolar generalized thermoelastic medium for plane strain problem. An application of an infinite space with an impulsive mechanical source has been taken to illustrate the utility of the approach. The integral transformation has been inverted by using a numerical inversion technique to get result in physical domain. The result in the form of normal displacement, normal force stress, tangential force stress, tangential couple stress and temperature field components have been obtained numerically and illustrated graphically. Special case of a thermoelastic solid has also been deduced.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keyword
1 Introduction
The theory of micropolarthermoelasticity has been a subject of intensive study. A comprehensive review of works on the subject was given by [4] and [19]. There has been very much written in recent years concerning the problem of propagation of thermal waves at finite speed. A generalized theory of linear micropolarthermoelasticity that admits the possibility of “second sound” effects was established by [1]. Recently, [9] established a new thermomechanical theory of deformable media that uses a general entropy balance as postulated by [8]. The theory is illustrated in detail in the context of flow of heat in a rigid solid, with particular reference to the propagation of thermal waves at finite speed. A theory of thermoelasticity for non-polar bodies, based on the new procedures, was discussed by [10]. Bahshi et al. [2] employed the eigen value approach to study the effect of rotation and relaxation time in two dimensional problem of generalized thermoelasticity. Kumar and Rani [15] studied the deformation due to mechanical and thermal sources in generalized orthorhomticthermoelastic material. Kumar and Rani [16] investigated the dynamic response of a homogeneous, isotropic, generalized thermoelastic half-space with voids subjected to normal, tangential force and thermal stress. The micropolar theory was extended to include thermal effects by [4] and [19]. Kumar and Chadha [13] derived the expressions for displacements, microrotation, force stress, couple stress and first moment for a half - space subjected to an arbitrary temperature field and a particular case of line heat source has been discussed in detail. The uniqueness of the solution of some boundary value problems of the linear micropolarthermoelasticity was investigated by [3]. Passarella [21] solved the initial-boundary value problem for micropolarthermoelasticity and proved a uniqueness theorem for the problem. Mahalanabis and Manna [17] discussed eigen value approach to linear micropolarthermoelasticity by arranging basic equations of elasticity in the form of matrix deferential equation in the Hankel transform and extended the approach to linear thermoelasticity. Marin and Lupu [18] investigated harmonic vibrations in thermoelasticity of micropolar bodies. Kumar and Deswal [14] discussed the disturbance due to mechanical and thermal sources in homogeneous isotropic micropolar generalized thermoelastic half-space.
2 Formulation and Solution of the Problem
We consider a homogeneous, isotropic, micropolar generalized thermoelastic solid in an undisturbed state and initially at uniform temperature. We take a cartesian system (x, y, z) and z-axis pointing vertically into the medium.
Following [6, 12] and [11], the field equations and the constitutive relations in micropolar generalized thermoelastic solid without body forces, body couples and heat sources can be written as
For the L-S (Lord Shulman) theory \(\tau _1 =0\), \(\Xi =1\) and for G - L (Green Lindsay) theory \(\tau _1 =0\), \(\Xi =0\),
The thermal relaxations \(\tau _0 \) and \(\tau _1 \) satisfy the inequality \(\tau _{1} \ge \tau _{0} >0\) for the G-L theory only. However, it has been proved by [22] that the inequalities are not mandatory for \(\tau _{0} \) and \(\tau _{1} \) to follow.
For two dimensional plane strain problem parallel to xz-plane, we assume
The displacement components \(u_1 , u_3 \)and microrotation component depend upon x, z and t and are independent of co-ordinate y, so that \(\frac{\partial }{\partial y}\equiv 0\). With these considerations and using (2.6) and introducing the non-dimensional quantities as
where
Now applying Laplace and Fourier transform defined by
on the set of Eq. (2.1)–(2.3), after suppressing primes, we get
where
Equations (2.9)– (2.12) can be written in the vector matrix differential equation form as
where
and O is the Null matrix of order 4 with
To solve the Eq. (2.14), we take \(W(\xi ,z,p)=X(\xi ,p)\mathrm{{e}}^{\mathrm{{qz}}}\) for some q, So we obtain
This leads to Eigen value problem. The characteristic equation corresponding to the matrix A is given by
which on expansion provides us
where
The eigen values of the matrix A are the characteristic roots of the Eq. (2.19). The vectors \(\mathrm{{X}}\left( {\xi ,p} \right) \) corresponding to the eigen values \(q_s \)can be determined by solving the homogeneous equations
The set of eigen vectors \(\mathrm{{X}}_\mathrm{{s}} \left( {\xi ,\mathrm{{p}}} \right) \) ; s \(=\) 1, 2, 3, ..., 8 may be defined as
where
Thus solution of Eq. (2.14) is as given by [23]
\(\mathrm{{E}}_{1} , \mathrm{{E}}_{2} ,\mathrm{{E}}_{3} ,\mathrm{{E}}_{4} ,\mathrm{{E}}_{5} ,\mathrm{{E}}_{6} ,\mathrm{{E}}_{7} \) and \(\mathrm{{E}}_{8} \) are eight arbitrary constants. The Eq. (2.32) represents a general solution of the plane strain problem for isotropic, micropolar generalized thermoelastic solid and gives the displacement, microrotation and temperature field in the transformed domain.
3 Applications
4 Mechanical Source
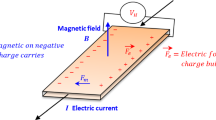
We consider an infinite micropolar generalized thermoelastic space in which a concentrated force where F\(_{0}\) is the magnitude of the force, F \(= -F_0 \delta (\mathrm{{x}})\delta (\mathrm{{t}}) \) acting in the direction of the z-axis at the origin of the Cartesian co-ordinate system as shown in Fig. 33.1. The boundary condition for present problem on the plane z \(=\) 0 are

.
Making use of Eq. (2.6)–(2.7) and \({F}'_0 =\frac{F_0 }{K}\) in Eq. (2.4)–(2.5), we get the stresses in the non-dimensional form with primes. After suppressing the primes, we apply Laplace and Fourier transforms defined by Eq. (2.8) on the resulting equations and from Eq. (3.1), we get transformed components of displacement, microrotation, temperature field, tangential force stress, normal force stress and tangential couple stress for z \(>\) 0 are given by
for z\(<\)0, the above expressions get suitably modified, e.g.
Making use of the transformed displacements, microrotation, microstretch and stresses given by (3.6)–(3.12) in the transformed boundary conditions, we obtain eight linear relations between the \(\mathrm{{E}}_{i}\)’s, which on solving gives
where
Thus functions \(\tilde{u}_1 ,\tilde{u}_3 ,\tilde{\varphi }_2 ,\tilde{T},\tilde{t}_{31} ,\tilde{t}_{33} \) and \(\tilde{m}_{32} \) have been determined in the transformed domain and these enable us to find the displacements, microrotation, temperature field and stresses.
Case I : For L-S theory, \(a_s \), \(b_s \) and \(c_s \) in the expressions (3.5)–(3.12) take the form
where
and \(\pm \) \(q_s \) (s \(=\) 1, 2, 3, 4) are roots of the Eq. (2.19) in which \(\sigma _1 ,\sigma _2 ,\sigma _3\,and\,\sigma _4 \) are obtained respectively from expressions(2.20)–(2.23) by taking \(\tau _1 =0, \Xi =1\).
Case II : For G-L theory, as b’s and c’s in the expressions (3.5)–(3.12) take the form
where
and \(\pm \) \(q_s \) (s =1, 2, 3, 4) are roots of the equation (2.19) in which \(\sigma _1 ,\sigma _2 ,\sigma _3 and\sigma _4 \)are obtained respectively from expressions (2.20)–(2.23) by taking \(\Xi =0\)
Case III : For Green and Naghdi theory (G-N), Eq. (2.1), (2.3) and (2.4) can be written as
and \(K^{{*}}\) is not the usual thermal conductivity but a material characteristics constant in G - N & theory and is given \(K^{{*}}\left( {=\frac{C^{{*}}\left( {\lambda +2\mu } \right) }{4}} \right) \)
With the help of Eq. (3.26)–(3.28) and following the procedure of the previous sections, we get the expressions for displacements, microrotation, temperature, field, force stresses and couple stress by taking in Eq. (3.5)-(3.11).
Particular Case I : Neglecting micropolarity effect i.e. \(\alpha =\beta =\gamma =K=j=0\) in Eq. (3.5)–(3.12), the expressions for displacement components, force stresses and temperature field are obtained in a thermoelastic medium as
where
and \(\pm q_s^{*} \left( {s=1,2,3} \right) \) are the roots of the equation
with
i. For L-S theory : Taking \(\tau _1 =0\), \(\Xi =1\)in expression given by (3.29)–(3.33) of particular case I, we obtain expressions for displacement components, temperature field and force stresses.
ii. For G-L theory : Taking \(\Xi =0\) in expressions given by (3.29)–(3.33)of particular case I, we obtain expressions for displacement components, temperature field and force stresses
iii. For G-N theory : Neglecting micropolarity effect i.e. (\(\alpha =\beta =\gamma =K=j=0)\) in subcase III of case I, we get the expressions for displacement components, temperature field and force stresses are obtained in a thermoelastic medium by taking
where
and \(\pm \) \(q_s^0 \left( {s=1,2,3} \right) \) equation
where \(\tilde{f}_{e}\) and \(\tilde{f}_{0}\) are even and odd parts of the functions \(\tilde{f}(\xi ,z,p)\) respectively. Thus, expression (37.1) gives us the Laplace transform \(\bar{f}(x,z,p)\) of the function f (x, z, t). Following [11], the Laplace transform function \(\bar{f}(x,z,p)\) can be inverted to f (x, z, t) .
Thus, the expressions given by equations (3.5)–(3.12) with the help of (3.13)–(3.16) and (3.17) represent the solution of plane strain problem under consideration in the transformed domain using eigen value approach.
5 Inversion of the Transforms
To obtain the solution of the problem in the physical domain, we must invert the transforms for three theories that is L-S, G-L and G-N. These expressions are functions of z, the parameters of Laplace and Fourier transforms p and \(\xi \) respectively and hence are of the form\(\bar{{f}}(x,z,p)\). To get the function \(f(x,z,t)\)in the physical domain, first we invert the Fourier transform using
The last step in the inversion process is to evaluate the integral in Eq.(37.1). This was done using Romberg’s integration with adaptive step size. This method uses the results from successive refinements of the extended trapezoidal rule followed by extrapolation of the results to the limit when the step size tends to zero. The details can be found in [20].
6 Numerical Results and Discussion
Following [5], we take the following values of relevant parameters for the case of Magnesium crystal as
7 Discussion
The variations of normal displacement \(\mathrm{{U}}_{3} \) with distance x for three different theories (L-S, G-L and G-N) in both media after multiplying the original values for G-N theory in MTE medium by 10 are shown in Fig. 33.2 The values of normal displacement due to microrotation effect are less in MTE medium in comparison to TE medium in the \(0\le x\le 0.5\)for all three theories, whereas the values of \(\mathrm{{U}}_{3} \) oscillate as x increases further in the rest of the range for both media. It is also evident that normal displacement decreases for both media for L-S and G-L theories, increases gradually in MTE medium for G-N theory and oscillate in TE medium for G-N theory.

Variation of normal displacement \(U_{3}(x,l)\)

Variation of normal force stress \(T_{33}(x,l)\)

Variation of tangential couple stress \(M_{32}(x,l)\)

variation of temprature field \(T^{*}(x,l)\)
The values of normal force stress \(\mathrm{{T}}_{{33}} \)in magnitude are more for three different theories in MTE medium in comparison to TE medium. It is also noticed that the values of normal force stress oscillate for L-S and G-L theories in MTE and TE media. The values of normal force stress also oscillate for G-N theory in TE medium, whereas these decrease gradually with increasing value of x in MTE medium. These variations of normal force stress have been shown in Fig. 33.3 after dividing the original values by 10 in case of G-N theory in MTE medium.
Figure 33.4 depicts the variations of tangential couple stress \(\mathrm{{M}}_{{32}} \) for three different theories in MTE medium after dividing the original values for G-N theory by 10. The behaviour of tangential couple stress is oscillatory for three theories. It is noticed that the value of tangential couple stress for G-N theory are large in comparison to L-S and G-L theories in the range \(0\le x\le 2.5\) and the values are small for the rest of the range.
The range of values of temperature field in magnitude is large in case of three theories in MTE medium in comparison to TE medium. It is also observed that temperature field oscillate in TE medium for three different theories but in MTE medium for L-S and G-L theories, the temperature field oscillate. The values of temperature field for G-N theory decrease gradually with increasing value of x in MTE medium. These variations shown in Fig. 33.5 after multiplying the original values in case of L-S and G-N theories by \(10^{2}\) and \(10^{2}\) respectively in MTE medium; the original values in case of G-N theory (TE medium) and also magnified by multiplying \(10^{2}\).
8 Conclusion
From the above numerical results, we conclude that micropolarity has a significant effect on normal displacement, normal force stress and temperature field mechanicalsource for three theories.Mcropolar effect is more appreciable for normal displacement and temperature field in, comparison to normal force stress. Application of the present paper may also be found in the field of steel and oil industries. The present Problem is also useful in the field of geomechanics, where, the interest is about the various phenomenon occurring in the earthquakes and measuring of displacements, stresses and temperature field due to the presence of certain sources.
9 Nomenclature
\(\lambda , \mu =\) Lame’s constants
\(\alpha , \beta ,\gamma , \mathrm{K} =\) Micropolar material constants
\(\alpha _{0}\), \(\lambda _{0}\), \(\lambda _{1 }=\) Material constants due to the presence of stretch.
\(\lambda _{I}, \mu _{I}, \mathrm{K}_{I}, \alpha _{I}, \nu , \gamma _{I}, \alpha _{0I}, \lambda _{0I}, \lambda _{1I } =\) Microstretch viscoelastic constants
\(\rho \quad =\) Density j \(=\) Micro-inertia u \(=\) Displacement vector \(\varvec{\upphi } =\) Microrotation vector
\(\varvec{\upphi }^*=\) Scalar microstretch
t\(_{ij } =\) Force stress tensor
m\(_{ij } =\) Couple stress tensor
\(\lambda _l \quad =\) Microstress tensor
\(\delta _{ij} \quad =\) Kronecker delta
\(\varepsilon \) \(_{ijr } =\) Alternating tensor
\(\varDelta \quad =\) Gradient operator
\(\iota \quad =\) Iota
And dot denotes the partial derivative w.r.t. time.
References
Boschi E, Jesan D (1993) A generalized theory of linear micropolar thermoelasticity. Meccanica 8(3):154–157
Bakshi R, Bera RK, Debnath L (2004) Eigen value approach to study the effect of rotation and relaxation time in two dimensional problems of generalized thermoelastic. Int J Engg Sci 42:1573–1586
Cracium L (1990) On the uniqueness of the solution of some boundary value problems of some boundary value problems of the linear micropolar thermoelasticity. Bull Int Politech Lasi Sect 36:57–62
Eringen AC (1970) Foundations of micropolar thermoelasticity, vol 23. Springer, International Center for Mechanical Science Courses and Lecturer
Eringen AC (1984) Plane waves in a non-local micropolar elasticity. Int J Engg Sci 22:1113–1121
Eringen AC (1968) Theory of micropolar elasticity. In: Leibowitz H (ed) Fracture vol II. Academic Press, New York (chapter-7).
Green AE, Lindsay KA (1972) Thermoelasticity. J Elast 2:1–5
Green AE, Naghdi PM (1977) On thermodynamics and the nature of the second law. Proc Ray Soc Lond A 357:253–270
Green AE, Naghdi PM (1991) A Re-examination of the Basic Postulate of Thermomechanics. Proc Ray Soc Lond A 432:171–194
Green AE, Naghdi PM (1993) Thermoelastic without energy dissipation. J Elast 31:189–208
Honig G, Hirdes U (1984) A method for the numerical inversion of the Laplace transforms. J Comp Appl Math 10:113–132
Lord HW, Shulman Y (1967) A generalized dynamical theory of thermoelasticity. J Mech Phys Solids 15:299–306
Kumar R, ChadhaT K (1986) On torsional loading in an axismmetricmicropolar elastic medium. Proc Indian Acad Sci (Maths Sci) 95:109–120
Kumar R, Deswal S (2001) Mechanical and thermal sources in the micropolargeneralized thermoelastic medium. J Sound Vib 239:467–488
Kumar R, Rani L (2004) Deformation due to mechanical and thermal sources in the generalized orthorhombic thermoelastic material. Sadhana 29:429–448
Kumar R, RaniL (2005) Deformation due to mechanical and thermal sources in the generalized half-space with void. J Therm Stress 28:123–143
Mahalanabis RK, Manna J (1997) Eigen value approach to the problems of linear micropolarthermoelasticity. J Indian Acad Math 19:67–86
Marin M, Lupu M (1998) On harmonic vibrations in thermoelasticity of micropolar bodies. J Vib Control 4:507–518
Nowacki W (1966) Couple stresses in the theory of thermoelasticity. In: Proceedings of the ITUAM symposia, Springer, pp 259–278.
Press WH, Teukolsky SA, Vellerling WT, Flannery BP (1986) Numerical recipes. Cambridge University Press, Cambridge
Passarella F (1996) Some results in micropolarthermoelasticity. Mech Res Commun 23:349–359
Sturnin DV (2001) On characteristics times in generalized thermoelasticity. J Appl Math 68:816–817
Sharma JN, Chand D (1992) On the axisymmetric and plane strain problems of generalized thermoelasticity. Int J Eng Sci 33:223–230
Author information
Authors and Affiliations
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2014 Springer International Publishing Switzerland
About this paper
Cite this paper
Singh, A., Singh, G. (2014). Study of Stability Matter Problem in Micropolar Generalised Thermoelastic. In: Sidharth, B., Michelini, M., Santi, L. (eds) Frontiers of Fundamental Physics and Physics Education Research. Springer Proceedings in Physics, vol 145. Springer, Cham. https://doi.org/10.1007/978-3-319-00297-2_33
Download citation
DOI: https://doi.org/10.1007/978-3-319-00297-2_33
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-00296-5
Online ISBN: 978-3-319-00297-2
eBook Packages: Physics and AstronomyPhysics and Astronomy (R0)