
Abstract
In the typical reversible systems which appear in many applications (symmetric) periodic solutions appear in one-parameter families. In this short survey we describe how these branches of periodic orbits originate from equilibria, terminate at homoclinic orbits, and branch from each other in period-doubling bifurcations or higher order subharmonic bifurcations. Adding external parameters allows to study degenerate cases and the transition from degenerate to non-degenerate situations.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
These keywords were added by machine and not by the authors. This process is experimental and the keywords may be updated as the learning algorithm improves.
1 Introduction
It is a kind of popular statement—initiated by Henri Poincaré himself—that in Hamiltonian systems the subset of periodic orbits forms a sort of backbone for the full dynamics of the system. What may be less well known is that in reversible systems the subset of symmetric periodic orbits shows a similarly rich behavior as its analogue in the Hamiltonian case. Of course, in many classical applications reversible systems are also Hamiltonian (and vice-versa), but reversible systems can be studied in their own right; actually, in many cases results for reversible systems are somewhat easier to obtain, only relying on symmetry properties and avoiding symplectic structures.
In this brief note we survey some of the basic branching behavior of symmetric periodic orbits in reversible systems. For simplicity we restrict to the simplest case of reversibility, and our statements will be rather descriptive instead of technically complete. Even then, keeping in mind that a simple picture is worth more than a thousand words, we would like to urge the interested reader to download the slides of our RTDS talk on this topic [17] and keep them at hand as we move forward.
The results which we describe are either very classical, or based on joint work we did during the last decade (or longer) in collaboration with Jürgen Knobloch, Bernold Fiedler, Maria-Cristina Ciocci, Francisco Javier Muñoz Almaraz, Jorge Galán, Emilio Freire, and Sebius Doedel. More details can be found in the papers [1–3, 5, 6, 10–14] for the older results, [7, 8] for more recent work, and [9, 15, 16] for more general results on the Lyapunov–Schmidt reduction which is in the background of our approach.
2 Reversible Systems
Consider a smooth finite-dimensional system
and the corresponding flow \(\tilde{x} =\tilde{ x}(t;x)\). We say that such system is reversible if there exist a closed subgroup \(\Gamma \subset \mathit{GL}(n; \mathbb{R})\) and a nontrivial group homomorphism \(\chi: \Gamma \rightarrow \{ 1,-1\}\) such that
It follows immediately that
Here we will restrict to the simplest possible case where \(\Gamma =\{ I,R\}\), with \(R \in \mathcal{L}({\mathbb{R}}^{n})\) a linear involution (i.e., R 2 = I) and \(\chi (R) = -1\); the reversibility condition (3.2) then reduces to
the flow satisfies
We also assume that
The prototype example of such reversible system is given by the scalar second order equation
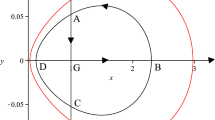
For this equation we have N = 1, \(x = (y,\dot{y})\) and \(\mathit{Rx} = R(y,\dot{y}) = (y,-\dot{y})\). Depending on f the phase plane typically consists of a succession of centers and saddle points along the y-axis. For the particular case \(f(y) = y(1 - y)\) we get a center at y = 0 and a saddle point at y = 1; there is a homoclinic orbit attached to the saddle, and the region inside this homoclinic is filled with period orbits. The full picture is symmetric under R.
We are particularly interested in symmetric orbits, i.e., orbits \(\gamma =\{\tilde{ x}(t;x_{0})\mid t \in \mathbb{R}\}\) such that R(γ) = γ. It is easy to show that an orbit γ is symmetric if and only if \(\gamma \cap \mathrm{Fix}(R)\neq \varnothing \). Choosing x 0 to be one of the intersection points we have then that \(R\tilde{x}(t;x_{0}) =\tilde{ x}(-t;x_{0})\). Excluding symmetric equilibria an orbit γ is symmetric and periodic if and only if \(\gamma \cap \mathrm{Fix}(R) =\{ x_{0},x_{1}\}\) for two distinct points x 0≠x 1; the minimal period of such symmetric periodic orbit equals two times the time needed to travel from x 0 to x 1: if T > 0 is such that \(x_{1} =\tilde{ x}(T;x_{0})\) and \(\tilde{x}(t;x_{0})\neq x_{1}\) for 0 ≤ t < T then the minimal period is 2T. It follows that symmetric periodic orbits are generated by the intersection points of the N-dimensional subspace Fix(R) with the (N + 1)-dimensional manifold \(\{\tilde{x}(t;x)\mid t \in \mathbb{R},\;x \in \mathrm{ Fix}(R)\}\); therefore symmetric periodic orbits typically appear in one-parameter families.
It is then a natural question to ask how these one-parameter families of symmetric periodic orbits start, finish, and/or branch from each other. The simple example above already shows a partial answer. The center with the surrounding periodic orbits is an example of the Lyapunov Center Theorem for reversible systems: under appropriate technical conditions each equilibrium whose linearization has a pair of simple purely imaginary eigenvalues ± iω 0 (ω 0 > 0) is contained in a two-dimensional invariant manifold filled with symmetric periodic orbits whose minimal period converges to 2π ∕ ω 0 as one approaches the equilibrium. At the other end the period tends to infinity, and the periodic orbits tend to the symmetric homoclinic orbit. This is an example of a period blow-up: again under appropriate technical conditions, each non-degenerate symmetric homoclinic orbit to a hyperbolic fixed point is the limit of a one-parameter family of symmetric periodic orbits whose minimal period tends to infinity as one approaches the homoclinic.
These are essentially the only phenomena one can see for N = 1; of course many more possibilities arise for N > 1. As a guiding example we can consider the following system (with f as before):
Here N = 2, \(x = (y,\dot{y},z,\dot{z})\) and \(\mathit{Rx} = R(y,\dot{y},z,\dot{z}) = (y,-\dot{y},z,-\dot{z})\). A particular question we can ask about this example (and which we will address further on) is: are there, close to the symmetric periodic orbits for z = 0, any other periodic orbits with z≠0 but small? Also, adding external parameters may help to see certain transitions from more degenerate to less degenerate situations.
3 Reversible Hopf Bifurcation
One of the main bifurcations appearing in general systems is the Hopf bifurcation, where an equilibrium looses stability under the change of an external parameter because a pair of simple eigenvalues of the linearization crosses the imaginary axis; as a result a small periodic orbit bifurcates from the equilibrium. In reversible systems such crossing of the imaginary axis is not possible. Indeed, consider a reversible system depending on a scalar parameter \(\lambda \in \mathbb{R}\):
assume also that x = 0 is an equilibrium for all λ (F(0, λ) = 0), and let \(A_{\lambda }:= D_{x}F(0,\lambda )\). It is easy to see that if \(\mu \in \mathbb{C}\) is an eigenvalue of A λ , then so is − μ. As a consequence, if A λ has a pair of simple eigenvalues on the imaginary axis, then this pair of eigenvalues can not be moved off the imaginary axis under a change of the parameter λ. The only way eigenvalues can be moved off the imaginary axis is by two pairs of purely imaginary eigenvalues meeting each other and then splitting off into the complex plane, two to the left, two to the right. This is precisely the situation described by the reversible Hopf bifurcation. A similar situation appears in Hamiltonian systems at a so-called Hamiltonian Hopf bifurcation.
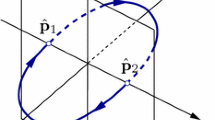
So assume that for λ < 0 the linearization A λ has two pairs of simple purely imaginary eigenvalues which coalesce for λ = 0 in a pair of (non-semisimple) purely imaginary eigenvalues, and such that for λ > 0 we have a quadruple of eigenvalues ± α ± iβ (α > 0, β > 0). For λ < 0 but small the two pairs of purely imaginary eigenvalues satisfy the non-resonance condition required by the reversible Lyapunov Center Theorem, and therefore we have for such λ two branches of symmetric periodic orbits originating from the equilibrium at x = 0. Detailed analysis shows that as λ goes to zero and becomes positive two scenarios are possible. In the first scenario the two families which exist for λ < 0 are locally connected into a single family which shrinks to the equilibrium as λ approaches zero and then disappears for λ > 0. In the second scenario the two families (for λ < 0) are not locally connected but become tangent to each other as λ goes to zero, and then connect to each other into a single family detached from the equilibrium for λ > 0. A detailed analysis of the associated dynamics can be found for example in Section 4.3.3 of [4]; the first scenario mentioned above corresponds to the “defocusing case,” while the second scenario corresponds to the “focusing case,”
4 Generic Subharmonic Branching
Next we turn our attention to the example system (3.8). We assume that the unperturbed system (for z = 0) has a family of symmetric periodic orbits (as explained in Sect. 3.2), parametrized by some parameter \(\alpha \in \mathbb{R}\); we call this the primary family. Denote the minimal period along this family by T(α). Now suppose that at α = α 0 there is a bifurcation of another branch of periodic orbits, with z≠0, and parametrized by \(\rho \in \mathbb{R}\); denote the minimal period along this branch by \(\tilde{T}(\rho )\). Then the limiting period along the bifurcating branch must be an integer multiple of the period at the branching point along the primary family, i.e., there must be some \(q \in \mathbb{N}\) such that \(\lim _{\rho \rightarrow 0}\tilde{T}(\rho ) = \mathit{qT}(\alpha _{0})\). In a more general situation this resonance condition translates in the fact that a symmetric period orbit can only be at a branching point of periodic solutions if it has a pair of multipliers which are roots of unity, i.e., of the form
One of the possible approaches to study the branching of periodic orbits at such resonant periodic orbit is by using the Poincaré map. More precisely, one considers a Poincaré map \(P: \Sigma \rightarrow \Sigma \) where the section Σ is chosen to be R-invariant; clearly \(\dim (\Sigma ) = 2N - 1\). Putting the origin on Σ at the intersection point with the resonant periodic orbit we have then P(0) = 0 and (because of the reversibility) \(\mathit{RPR} = {P}^{-1}\); as a consequence 1 is always an eigenvalue of DP(0), with odd (algebraic) multiplicity ≥ 1. Further on we will assume that 1 is a simple eigenvalue of DP(0) (generically this will be the case). The resonance condition then implies that DP(0) has a pair of eigenvalues of the form (3.10), with 0 < p < q and q ≥ 2. The problem is then to study the bifurcation of q-periodic points of P from the fixed point at the origin. This can be done by an appropriate Lyapunov–Schmidt reduction.
We should also mention the important property that the reversibility implies that if \(\mu \in \mathbb{C}\) is a multiplier of a symmetric periodic orbit then so is μ − 1; in particular, if a symmetric periodic orbit (along a branch of such symmetric periodic orbits) has a pair of simple multipliers on the unit circle, then by moving along the branch these multipliers have to stay on the unit circle.
4.1 Period Doubling
For the case q = 2 we assume that − 1 is an eigenvalue of DP(0) with geometric multiplicity one and algebraic multiplicity two. The problem of finding period-doubled solutions then reduces to a three-dimensional bifurcation equation with \(\mathbb{D}_{2}\)-symmetry: the dimension equals the dimension of the generalized kernel of DP 2(0), the \(\mathbb{D}_{2}\)-symmetry from a combination of the reversibility with the \(\mathbb{Z}_{2}\)-symmetry which originates from the fact that if x is a solution of P 2(x) = x, then so is P(x).
Denoting the coordinates on the three-dimensional “bifurcation space” by (α, ξ, η) and using the symmetries the bifurcation equations reduce to
where \(\varphi\) is a scalar function with \(\varphi (0,0) = 0\). This gives us immediately the solution branch \(\{(\alpha,0,0)\mid \alpha \in \mathbb{R}\}\), corresponding to the primary branch. If we assume the transversality condition \(\partial \varphi /\partial \alpha (0,0)\neq 0\) then we get a branch of period-doubled solutions \(\{{(\alpha }^{{\ast}}{(\xi }^{2}),\xi,0)\mid \xi > 0\}\) (we only have to consider ξ > 0 since ξ and − ξ correspond to the same 2-periodic orbit of P). The transversality condition means that as we move along the primary branch a pair of simple multipliers moves toward − 1 on the unit circle, coalesces at − 1, and then splits on the real axis in a generic way.
4.2 Subharmonic Branching
For q ≥ 3 we assume that the resonant multipliers (3.10) are simple multipliers. The Lyapunov–Schmidt reduction for the bifurcation of q-periodic points of P results in a three-dimensional problem with a \(\mathbb{D}_{q}\)-symmetry. The three-dimensional bifurcation space corresponds to the three-dimensional kernel of DP q(0), which itself corresponds to the three simple eigenvalues 1 and exp( ± iθ 0) of DP(0); it is convenient to denote the coordinates in this space by \(u = (\alpha,z) = (\alpha,\rho \exp (\pm i\theta )) \in \mathbb{R} \times \mathbb{C}\). The symmetry is generated by the reversibility and by the implicit \(\mathbb{Z}_{q}\)-symmetry of the problem: if x ∈ Σ generates a q-periodic point of P, then so do P(x), P 2(x), …, P q − 1(x) and P q(x) = x. On the bifurcation space the \(\mathbb{D}_{q}\)-symmetry is generated by \(S_{0}u = S_{0}(\alpha,z) = (\alpha,\exp (i\theta _{0})z)\) and \(\mathit{Ru} = R(\alpha,z) = (\alpha,\bar{z})\).
Using the symmetry one finds that the bifurcation equations take the form
where the functions \(h_{i}: \mathbb{R} \times \mathbb{Z} \rightarrow \mathbb{R}\) (i = 0, 1, 2) are smooth, with h 1(0) = 0 and \(h_{i}(u) = h_{i}(S_{0}u) = h_{i}(\mathit{Ru})\) for all \(u \in \mathbb{R} \times \mathbb{C}\) and i = 0, 1, 2. There are two immediate consequences. First, we have \(\mathcal{B}(\alpha,0) = 0\) for all \(\alpha \in \mathbb{R}\), giving the solution branch \(\{(\alpha,0)\mid \alpha \in \mathbb{R}\}\) corresponding to the primary branch. Second, if either h 0(0, 0)≠0 or h 2(0, 0)≠0, then nontrivial solutions (with z≠0) can only exist if (for z = ρexp(iθ))
Since all \(S_{0}^{j}u = S_{0}(\alpha,z) = (\alpha,\exp (\mathit{ij}\theta _{0})z)\) (\(j \in \mathbb{Z}\)) generate the same q-periodic orbit of P we have to consider only two cases: θ = 0 and \(\theta =\pi /q\), both with ρ > 0. For these the bifurcation equations reduce to a single scalar equation, respectively
and
We have already mentioned that h 1(0, 0) = 0; therefore, assuming the transversality condition \(\partial h_{1}/\partial \alpha (0,0)\neq 0\) we obtain from (3.14) and (3.15) two solution branches \(\{(\alpha _{+}^{{\ast}}(\rho ),\rho )\mid \rho \geq 0\}\) and \(\{(\alpha _{-}^{{\ast}}(\rho ),\rho \exp (i\pi /q))\mid \rho \geq 0\}\), respectively. For q ≥ 5 these two branches are very close to each other, as the two sides of an Arnol’d tongue: if \(\alpha _{+}^{{\ast}}(\rho _{+}) =\alpha _{ -}^{{\ast}}(\rho _{-}) = d\) for some small d > 0, then \(\vert \rho _{+} -\rho _{-}\vert =\mathrm{ O}\left ({d}^{\frac{d-2} {2} }\right )\). Also, the solutions along the two branches of subharmonics are symmetric.
A further calculation shows that for q ≥ 5 and if h 2(0)≠0), then the solutions along one of the two branches are elliptic and those along the other branch hyperbolic, in the following sense. The solutions along both branches have 4 multipliers close to 1; two of these (counting multiplicities) are exactly equal to 1; along the elliptic branch the two other multipliers are on the unit circle, while along the hyperbolic branch they are on the real axis—one inside and one outside of the unit circle.
For q = 3 and q = 4 (the so-called weak resonant cases) the second term in b + (α, ρ) and b − (α, ρ) is of order ρ, respectively ρ 2, and hence interferes with the order ρ 2 term in h 1; therefore these cases require a separate analysis which we do not comment on any further in this note.
The attentive reader may notice here a certain resemblance with the analysis of subharmonic bifurcations in dissipative systems, in particular the appearance of Arnol’d tongues and the distinction between weak and strong resonances. We should warn that this resemblance is purely formal, since the reversible and the dissipative cases are widely different. In dissipative systems subharmonic bifurcation is a codimension two phenomenon, while in reversible (and Hamiltonian) systems it is codimension zero, i.e., it appears robustly in fixed systems. In dissipative systems the Arnol’d tongues are regions in parameter space; points inside or at the border of the tongues correspond to systems having subharmonic solutions. In the reversible case which we discuss here the “tongues” are just two curves in a Poincaré section of phase space the points of which correspond to subharmonic solutions (in particular, the points “inside” the tongues do not correspond to periodic orbits).
In order to get the generic picture sketched above (two bifurcating branches of subharmonics, one elliptic and one hyperbolic, and close to each other as the two sides of an Arnol’d tongue) we need next to \(h_{2}(0)\neq 0\) (which is essentially a condition on some higher order terms in the normal form) basically two conditions: (a) a pair of simple resonant multipliers of the form (3.10), and (b) the transversality condition \(\partial h_{1}/\partial \alpha (0,0)\neq 0\). This transversality condition means that as we move along the primary branch (using α as a parameter) a pair of simple multipliers crosses the critical pair (3.10) with nonzero speed. This brings us to the question what happens when one of these conditions is not satisfied; the answer forms the subject of the next section.
5 Degenerate Subharmonic Branching
First we briefly consider the case where we have a symmetric periodic orbit with a resonant pair of multipliers which are not simple. More precisely, we assume that we have a symmetric periodic orbit with a resonant pair of multipliers (3.10) (for simplicity we will restrict to q ≥ 5) with geometric multiplicity one but algebraic multiplicity two (this requires N ≥ 3). Typically this means that as we move along the primary branch to which the critical periodic orbit belongs two pair of simple multipliers move along the unit circle and meet each other at the critical pair (3.10); then they split off the unit circle, with one pair inside and one pair outside the unit circle. Because of the requirement that the two pairs meet exactly at the resonant pair (3.10) this is a codimension one situation. Adding an appropriate external parameter \(\lambda \in \mathbb{R}\) we get a situation where for λ < 0 the meeting point of the two pairs of multipliers is at one side of the critical pair (3.10), while for λ > 0 it is at the other side. This means that both for λ < 0 and λ > 0 we have a non-degenerate situation, with a pair of multipliers crossing the resonant value with nonzero speed. So, both for λ < 0 and for λ > 0 we have two branches of subharmonics bifurcating from the primary branch; obviously, one then expects the same to happen for λ = 0, and this is precisely what comes out of a (rather lengthy) detailed analysis.
A more interesting situation arises when the resonant pair of multipliers (3.10) is simple, but the transversality condition is not satisfied. This is a situation which can already arise in our example system (3.8) when along the primary family the (minimal) period reaches a local maximum or minimum. This maximum or minimum has to happen precisely at a periodic orbit for which the resonance condition is satisfied, so again this is a codimension one situation. To give a full description we add an external parameter \(\lambda \in \mathbb{R}\); for example, in (3.8) we replace f(y) by f(y, λ) where \(f: \mathbb{R} \times \mathbb{R} \rightarrow \mathbb{R}\) satisfies appropriate technical conditions such that for the primary family given by the unperturbed equation \(\ddot{y} + f(y,\lambda ) = 0\) the following situation arises. For fixed λ < 0 a pair of simple multipliers moves along the unit circle, passes the resonant pair (3.10), turns around a little bit further on, and passes again the resonant pair. As λ increases toward zero the turning point comes closer to the resonant pair, for λ = 0 the turning point is exactly at the resonant pair, while for λ > 0 the turning happens before the resonant pair is reached. This means that for λ < 0 we have two generic subharmonic bifurcations close to each other along the primary family, while for λ > 0 there is no such subharmonic bifurcation.
To study this degenerate case we can use the same Lyapunov–Schmidt reduction as before; we get a three-dimensional reduced problem of the form (3.12) which reduces via (3.13) to two scalar bifurcation equations of the form
the two bifurcation functions b + (α, ρ, λ) and b − (α, ρ, λ) only differ in the higher terms (again we assume q ≥ 5). Assuming ABC≠0 we obtain two possible bifurcation scenarios, depending on the sign of BC; we assume AC > 0. For BC > 0 we get the banana scenario, where the two branches of subharmonics (one elliptic, one hyperbolic) which for λ < 0 start at each of the two bifurcation points are locally connected, shrink as λ approaches zero, and disappear for λ ≥ 0. For BC < 0 we get the banana split scenario: the two times two subharmonic branches which exist for λ < 0 are not locally connected, they become tangent to each other for λ = 0, and for λ > 0 connect to each other and detach from the primary branch, giving two branches of subharmonics, one elliptic and the other hyperbolic.
To illustrate the result one can look at the four-dimensional system
this system has two parameters γ and ω. For γ = 0. 3 the period map for the unperturbed system shows a maximum. For ω = 0. 4003 one finds two local branches of 5-subharmonics, very close to each other and forming the boundary of a very thin banana. However, and contrary to the theoretical results we have just explained, it is not so that one of the two branches is elliptic and the other hyperbolic. Instead, along each of the two branches we see a transition from elliptic to hyperbolic. The explanation of this deviation from the theory brings us to our last section.
6 Change of Stability Without Bifurcation
Our example (3.17) is not fully generic, in the sense that not all the conditions in order to get the banana scenario as described before are satisfied. The reason for this nongenericity stems from the fact that the system (3.17) has a first integral, namely the (square of the) amplitude of the forcing equation: \(H = {z}^{2} {+\omega }^{2}\dot{{z}}^{2}\). It is also clear that this first integral reaches a maximum along each of the two branches of subharmonics. And for such situation one can prove the following general result: when along a branch of symmetric periodic orbits in a reversible system with a first integral this integral reaches either a maximum or a minimum, then at the critical periodic orbit one will typically see a change of stability, from elliptic to hyperbolic or vice versa. This result forms a counterexample to the “folk theorem” in bifurcation theory which says that a change of stability leads to bifurcation. Here we get a single branch of periodic orbits along which we see a change of stability, from elliptic to hyperbolic, without any further bifurcation.
It is easy to change our earlier banana and banana split scenarios for this nongeneric situation with a first integral. Finally, the example system
allows to visualize (numerically) the transition from the nongeneric situation (for ε = 0) to the generic one. Increasing ε from zero one sees how along the two sides of the banana the transition points between elliptic and hyperbolic subharmonics start to shift and finally disappear (for sufficiently small bananas). The theoretical study of this transition is still underway…
References
Ciocci, M.-C., Vanderbauwhede, A.: On the bifurcation and stability of periodic orbits in reversible and symplectic diffeomorphisms. In: Degasperis, A., Gaeta, G. (eds.) Symmetry and Perturbation Theory, pp. 159–166. World Scientific, Singapore (1999)
Ciocci, M.-C.: Bifurcation of periodic orbits and persistence of quasi-periodic orbits in families of reversible systems. PhD. Thesis, University of Ghent (2003)
Ciocci, M.-C., Vanderbauwhede, A.: Bifurcation of periodic points in reversible diffeomorphisms. In: Elaydi, S., Ladas, G., Aulbach, B. (eds.) New Progress in Difference Equations—Proceedings ICDEA2001, Augsburg, pp. 75–93. Chapman & Hall/CRC, Boca Raton (2004)
Haragus, M., Iooss, G.: Local Bifurcations, Center Manifolds, and Normal Forms in Infinite-Dimensional Dynamical Systems. Universitext Series. Springer, Berlin (2010)
Knobloch, J., Vanderbauwhede, A.: Hopf bifurcation at k-fold resonances in reversible systems. Unpublished Preprint. Available at http://cage.ugent.be/~avdb/articles/k-fold-Res-Rev.pdf (1995)
Knobloch, J., Vanderbauwhede, A.: A general reduction method for periodic solutions in conservative and reversible systems. J. Dyn. Differ. Equ. 8, 71–102 (1996)
Muñoz Almaraz, F.J., Freire, E., Galán, J., Vanderbauwhede, A.: Change of stability without bifurcation: an example. In: Bohner, M., Dos̆lá, Z., Ladas, G., Ünal, M., Zafer, A. (eds.) Difference Equations and Applications—Proceedings of the ICDEA 2008 Conference, Istanbul, 2008, pp. 3–18. Bahçeşehir University Publications, Istanbul (2009)
Muñoz Almaraz, F.J., Freire, E., Galán, J., Vanderbauwhede, A.: Non-degenerate and degenerate subharmonic bifurcation in reversible systems (2012, personal notes)
Takens, F., Vanderbauwhede, A.: Local invariant manifolds and normal forms. In: Broer, H.W., Hasselblatt, B., Takens, F. (eds) Handbook of Dynamical Systems, vol. 3, pp. 89–124. Elsevier, Amsterdam (2010)
Vanderbauwhede, A.: Subharmonic branching in reversible systems. SIAM J. Math. Anal. 21, 954–979 (1990)
Vanderbauwhede, A., Fiedler, B.: Homoclinic period blow-up in reversible and conservative systems. Z. Angew. Math. Phys. 43, 292–318 (1992)
Vanderbauwhede, A.: Branching of periodic solutions in time-reversible systems. In: Broer, H., Takens, F. (eds.) Geometry and Analysis in Non-linear Dynamics. Pitman Research Notes in Math., vol. 222, pp. 97–113. Longman Scientific & Technical, Harlow (1992)
Vanderbauwhede, A.: Branching of periodic orbits in Hamiltonian and reversible systems. In: Agarwal, R.P., Neuman, F., Vosmansky, J. (eds.) Proceedings Equadiff 9 (Brno 1997), pp. 169–181. Masaryk University, Brno (1998)
Vanderbauwhede, A.: Subharmonic bifurcation at multiple resonances. In: Elaydi, S., Allen, F., Elkhader, A., Mughrabi, T., Saleh, M. (eds.) Proceedings of the Mathematics Conference (Birzeit, August 1998), pp. 254–276. World Scientific, Singapore (2000)
Vanderbauwhede, A.: Lyapunov–Schmidt method for dynamical systems. In: Meyers, R.A. (ed.) Encyclopedia of Complexity and System Science, pp. 5299–5315. Springer, New York (2009)
Vanderbauwhede, A.: Lyapunov–Schmidt—a discrete revision. In: Elaydi, S., Oliveira, H., Ferreira, J.M., Alves, J.F. (eds.) Discrete Dynamics and Difference Equations—Proceedings of the ICDEA 2007 Conference, Lisbon, pp. 120–143. World Scientific, Singapore (2010)
Vanderbauwhede, A.: Branches of Periodic Orbits in Reversible Systems. Slides of the RTDS 2012 Lecture. Download available at http://cage.ugent.be/~avdb/english/talks/RTDS2012.pdf (2012)
Acknowledgements
The more recent work reported in this note has been supported by the University of Sevilla and the MICIIN/FEDER grant number MTM2009-07849.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2013 Springer Basel
About this paper
Cite this paper
Vanderbauwhede, A. (2013). Branches of Periodic Orbits in Reversible Systems. In: Johann, A., Kruse, HP., Rupp, F., Schmitz, S. (eds) Recent Trends in Dynamical Systems. Springer Proceedings in Mathematics & Statistics, vol 35. Springer, Basel. https://doi.org/10.1007/978-3-0348-0451-6_3
Download citation
DOI: https://doi.org/10.1007/978-3-0348-0451-6_3
Published:
Publisher Name: Springer, Basel
Print ISBN: 978-3-0348-0450-9
Online ISBN: 978-3-0348-0451-6
eBook Packages: Mathematics and StatisticsMathematics and Statistics (R0)