
Abstract
These days, in many grids around the world power system stability relies on the functionalities of modern wind turbines.
Access provided by Autonomous University of Puebla. Download chapter PDF
Similar content being viewed by others
These days, in many grids around the world power system stability relies on the functionalities of modern wind turbines. A modern wind turbine (WT) is usually characterized by a rated power of several megawatts (MW) and its flexibility in operation. Although several MW might seem much for a WT, from a power system’s point of view, it means that its generation changes from a few power plants with the size of many hundred MW each to a large number of geographically dispersed individual WTs.
In this chapter, the terms power system (PS) and grid are used as synonyms. Both terms are used in the literature and, hence, for the sake of readability, they are used alternatingly in this chapter.
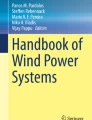
There is a vast variety of potential interactions between WTs and PSs. Therefore, grid integration of WTs can be approached from many different sides. It is obviously not possible to address all topics related to the grid integration of WTs in this chapter. To give an idea about the complexity of the problem, Fig. 1 shows a selection of related topics in terms of the period lengths of the interactions between wind power and PSs.

Logarithmic time scale of mutual effects between wind power and PSs
The progressing transition to renewable energies has shifted the focus of grid integration of WTs. Consequently, in this chapter emphasis is put on the most important and most recent problems of today’s grid integration of wind power.
In the following sections, electric PSs and the different conceivable WT types are briefly introduced. Following that, the historic aspects of grid integration of WTs are briefly touched upon, which then leads to the most dominant problems of today’s grid integration of WTs. Subsequently, the grid quantities' voltage and frequency are explained, and each explanation is followed by a section, which discusses how WTs can stabilize the respective grid quantity.
1 Introduction to Grid Integration of Wind Turbines
It is widely accepted that anthropogenic climate change is mainly caused by greenhouse gases, which result from burning fossil fuels. Therefore, a majority of countries have agreed on reducing greenhouse emissions to limit global warming to less than 1.5 °C above pre-industrial levels [1].
The power sector has been a major emitter of greenhouse gases. Traditionally, electric power has mainly been generated by thermal power plants, which run on fossil fuels. Hence, the necessary decarbonization of the power sector leads to an increasing share of renewable energy generators. One of the most widespread and most widely developed renewable generators are WTs. Therefore, wind power installations, and hence wind power infeed into PSs, grow quickly in many countries all over the world [2, 3]. Due to the increasing share in wind power production, WTs become an indispensable part of a PS. Since WTs replace conventional power plants, they have to be as reliable as conventional power plants. In addition, WTs also have to take over the control functionalities, which have been provided by conventional power plants. Consequently, this chapter focuses on the grid stabilizing functionalities, which have to be provided by WTs. It has to be emphasized, though, that most topics discussed in the section Grid Integration of the first edition of this book remain valid and have to be considered when integrating WTs into PSs [4].
1.1 Introduction to Electric Power Systems
The purpose of electric PSs is to connect the consumers of electric energy with the producers of electric energy. A PS is not only a physical link between the generators and the consumers, but it is also a marketplace for the commodity electricity.
Hence, it is the task of a PS to provide the consumers with the electricity that they buy from the generators. This task has to be performed safely, reliably and with the least possible losses. Furthermore, the electricity has to be provided in a quality, which is usable for the consumer. Hence, the PS quantities, which are introduced in Sects. 2 and 4, have to be maintained in specific limits.
It is historically grown that large PSs are almost invariably alternating current (AC) systems. One fundamental characteristic of electric AC energy is (unlike other commodities like water, oil and gas) that it cannot be stored. Direct current (DC) can be stored in batteries or capacitors. AC power, on the other hand, has to be generated exactly at the time when it is to be consumed. Traditionally, AC power is generated with rotating generators. Kinetic energy can be stored in the rotation of such generators. However, without the conversion from kinetic energy to electric energy, AC power cannot be produced with rotating generators. Hence, inertia is the only energy storage which can store AC power indirectly, and only in very small amounts. The use of kinetic energy in AC PSs is discussed in detail in Sect. 4.2.
A consequence of this lack of energy storage is that AC power has to be generated simultaneously with its consumption. In other words, generation and demand have to be in balance at all times. The PS frequency is a measure of this balance, which is the topic of Sect. 4.
Since the electricity has to be supplied in a quality, which is usable for the consumer, the producer has little control over the amount that is consumed. Water works could lower the pressure in the water supply network to provide consumers with less water when the demand exceeds the available resources. In an electric PS, the system operator can neither lower the voltage nor the frequency to an effective extent, without making the electricity unusable for the appliances of the consumers. Consequently, the generators have no other choice than to adjust their production to the prevailing demand.
Traditionally, thermal power plants were built in the vicinity of the demand, i.e. close to the load centers. This requires transporting the prime energy to the location of the power plants. The advantage is that the electric power has to be transported over short distances only, which reduces transmission losses. Renewable energy generators, on the other hand, have to be built where natural energy resources are available, irrespective of the location of the electricity demand. In the case of WTs, this means that WTs need to be built where the wind speed is high. The PS has to transport the electricity to the consumers, whose locations are usually not chosen based on wind speeds.
1.1.1 Power System Setup
Most PSs comprise a transmission system, which transports large amounts of power over longer distances, and a distribution system, which distributes the electric power to consumers in geographical proximity. Transmission usually takes place on high voltage (HV) or even extra high voltage (EHV), while distribution usually applies a medium voltage (MV) and low voltage (LV). The higher the voltage, the lower the current at a given power value. Low current means low losses in the lines, which is why transmission over longer distances is done with HV lines.
The nominal voltage ranges of these voltage levels are listed in the following. It has to be noted though that there are no universally applicable definitions of these limits:
Figure 2 shows a single line (more on this in Sect. 1.1.2) diagram of a typical PS setup. Large generators produce power on the MV level (blue), and their power is transported via HV (red) transmission lines to a MV distribution grid. The power flows via transformers from one voltage level to another. The distribution system transports power over shorter distances. Both larger MV consumers as well as smaller LV (green) consumers are connected to the distribution system. In the LV system, many small consumers run on one single phase only, which leads to a further reduction in voltage; see Sect. 1.1.2. Small generators might also be single-phase appliances, which run on LV; hence, these are also connected to the distribution system.

Left: Single line diagram of a typical three-phase PS comprising HV (red), MV (blue) and LV (green) levels. Right: Legend of the used symbols
For redundancy, some connections are ring feeders, which allow the power to flow through two alternative lines. The maximum redundancy is achieved with meshed grids (not shown in Fig. 2), where the power can flow through more than two alternative lines.
A feeder is called radial feeder if the power can flow via a single route only. Radial feeders are simple and cheap, but have the least redundancy. In case a line has a fault, e.g. a short-circuit, circuit breakers on either side of this line can take it out of operation. By de-energizing a radial feeder, the power has no alternative route to flow.
PSs are usually AC because AC voltages can be easily stepped up and down with transformers. Hence, AC PSs are a well-established technology. However, even in AC PSs also single DC links can be found for varies reasons. Figure 3 shows a typical example, where two AC PSs are connected via a high-voltage DC (HVDC) link. If two AC PSs have different frequencies (50 and 60 Hz), it is inevitable to connect them via DC if power is to be exchanged between them. The same applies if two AC PSs have the same nominal frequency, but are not operated in synchronism, e.g. the British and the Central European PSs.

Left: HVDC link connecting two AC grids. Right: Legend of the used symbols
Even inside an AC PS, DC links might be applied for transporting power over long distances. In such a case, it is an economic decision, whether an AC line or a DC line is built. Looking at Fig. 3, it becomes obvious that DC requires substantial technological effort, as it comprises three-winding transformers and AC/DC inverters on either side of the DC line. However, long AC lines also require substantial technological effort. It is inherent that the instantaneous value of AC voltage varies sinusoidally, i.e. that it is never constant. Hence, electro-magnetic waves propagate through AC lines. If the length of an AC line is in the order of magnitude of the length of these electro-magnetic waves, the voltages along the line are affected by the waves. It is already difficult to maintain voltages inside the tolerance while the line is loaded normally; however, it becomes extremely demanding to avoid too high voltages when the line is only lightly loaded or in no-load condition.
The electro-magnetic waves have the largest impact on the voltage in underground or subsea cables, as opposed to overhead lines. Therefore, many offshore wind farms are connected to the onshore PS via HVDC links. Looking at Fig. 3, one AC grid could be the offshore wind farm, while the other AC grid could be the onshore grid into which the wind farm feeds its power.
The decision of whether an HVDC link is built inside an AC PS is usually taken depending on the voltages that would occur on the alternative AC line. Voltages on AC lines are further discussed in Sect. 2.
1.1.2 Three-Phase System and Single-Phase Representation
AC PSs are usually three-phase systems. Other numbers of phases are conceivable as well, however, three phases are an optimum in the trade-off between benefit and complexity. Multiple phases provide multiple ways to connect generators and consumers to the PS. Figure 4 shows a three-phase transformer, which is connected in the delta on the primary side (p) and in a star on the secondary side (s). The advantage of the star connection becomes immediately obvious in that there is a fourth “phase”: the neutral conductor (N), which leads to the star point.

Three-phase transformer connected in delta on the primary side (p) and in star of the secondary side (s). The arrows indicate the voltages (V) and the currents (I)
The star point can, but does not need to be, connected to the ground for protection purposes. Therefore, the ground connection is shown in gray in Fig. 4. The star connection provides a division of the voltage. Instead of only the voltage between two phases, in a star connection also the voltage between one phase and neutral is available. Equation 1 gives an example of Fig. 4.
The divided voltages in star connection are advantageous for low-power applications. Low-power appliances are often single-phase, which are therefore connected between phase and neutral. When the three phases in the star connection are loaded differently, the neutral conductor carries the resulting residual current. If one phase is loaded differently from the other two in a delta connection, this has an immediate effect on the current, and hence, the voltages of the other two phases.
In PSs, it is common practice to name nominal voltage as phase-to-phase voltages. Therefore, the voltage ranges for the different voltage levels, mentioned in Sect. 1.1.1, are the root mean square (RMS) values of phase-to-phase voltages (Vab, Vac, Vbc).
In a three-phase PS, it is desirable to distribute the load equally among the phases. Hence, in the normal operation of many PSs, the voltages and currents of the three phases are equal. Therefore, in PS analysis it is often unnecessary to deal with the individual phases. Instead, the three phases are aggregated into one phase only: the so-called single-phase equivalent.
If the currents are equal (Ia = Ib = Ic) and the voltages are equal as well (VaN = VbN = VcN), then the powers flowing in the three phases are equal, too: Sa = Sb = Sc. Hence, the system can be simplified to a single-phase equivalent, whose power is
If the voltage in a single-phase equivalent is assumed to be a phase-to-neutral voltage (VaN or VbN or VcN), then the single-phase equivalent current is a current, which cannot be found in the real three-phase system. Instead, the current in the single equivalent phase can be derived from the phase-current of the system in the star connection:
If the system to be expressed as a single-phase equivalent is not in star connection, a fictive star point has to be calculated with delta-star transformation. The methodology of this transformation can be found in the literature [5], and is hence not elaborated on here.
When considering grid integration of WTs, a balanced system can be assumed in most cases. Exceptions are the analysis of single-phase and two-phase short circuits, which are not elaborated on here. Therefore, in the rest of this chapter there are no more three-phase representations of PSs shown. Instead, only single-phase equivalents are applied for representing three-phase systems.
1.1.3 Per Unit System
In PS analysis, it is common practice to express quantities in per unit (pu) rather than in SI units. Equation 4 shows the concept:
There are many reasons why it is advantageous to apply the pu concept:
-
If different devices in a PS (e.g. different WTs of different sizes and potentially also of different types) are referred to one basis, they become easily comparable.
-
If different devices in a PS (e.g. different WTs) are referred to a system basis (e.g. the rated power of the whole PS), their contribution to the system (e.g. the overall power transmitted through the PS) becomes obvious.
-
If a device in a PS is referred to its rated values (e.g. different WTs of different sizes are referred to their rated power values), the loading of each individual device becomes obvious.
-
In a PS, multiple MW flow through cables with very small impedances in ohms (Ω): power6 W flows through impedance−3 Ω. Expressing all quantities that are required for PS analysis (voltages, currents and impedances) in terms of pu leads to values that are in the same order of magnitude. Comparable numbers are advantageous for calculations.
-
In a PS with different voltage levels, neither the voltages nor the currents in the different voltage levels are directly comparable. In pu representation, the voltage levels seem to disappear and the values become directly comparable. To illustrate this concept, Fig. 5 provides an example.
Fig. 5 
Simplified WT feeder with three voltage levels (top) with applicable currents in amperes (middle) and with all quantities in pu (bottom)

The example shown in Fig. 5 comprises a radial WT feeder, where a 3 MW WT feeds into a 690 V LV cable. The power is stepped up to 20 kV MV and eventually fed into the 220 kV HV grid. To facilitate comprehensibility, it is assumed that the whole feeder is purely ohmic, i.e. that only energy losses occur along the line; no reactive power occurs. It is further assumed that the transformers are lossless, and hence, only the cables cause ohmic voltage drops and energy losses. The considered operating point of the WT is rated power at rated voltage.
Comparing the currents (I) shown in the middle of Fig. 5, it becomes obvious that they differ grossly, due to the different voltage levels. Also, the cable resistances (R) differ by orders of magnitude. It is impossible to tell the losses that occur from these resistances. In order to translate the system to pu, and in order to let the different voltage levels virtually disappear, base values have to be chosen.
In the example at hand, the base voltage is chosen to be the rated voltage of the WT: Vbase = 690 V.
The power base is chosen to be the rated power of the WT: Sbase = 3 MW. (It has to be noted here that for the base power the capital letter S is used, although the active power of the WT is denoted with the capital letter P. This notation is chosen as it is consistent with the notation used in the literature [5]).
With these base values, the applicable base impedance (Zbase) can be derived for the applicable voltage level (here the 690 V level to which the WT is connected):
The impedance base derived in Eq. 5 can be transferred to the other voltage levels with the square of the voltage ratio. Equation 6 shows the transformation from the LV level to the MV level as example:
Dividing any component impedance by the applicable base impedance leads to a system that looks like everything was on the same voltage level. When dividing a quantity with its base value, which has the same unit as the quantity to be divided, the physical unit cancels out and gets replaced by “per unit” (pu).
With the impedances and the power of the WT in pu, the power along the feeder can be derived. In the bottom of Fig. 5, the system is shown in pu. It can be seen that the pu current is identical in all voltage levels, as there is no path through which the current could flow off. The impedances in pu reveal that the highest voltage level causes the least voltage drop and the least power losses.
Due to the advantages of the pu system, and due to its widespread use in PS analysis, pu notation is used in the following parts of this chapter.
1.1.4 Basic Power System Quantities
Energy sources in PSs are voltage (V) sources. Hence, voltage is the force that drives energy through a PS. Figure 6 shows a WT feeder with LV, MV and HV cables. The WT is the source of VWT, which opposes the voltage in the HV grid, Vinf.

Single line diagram of WT feeder, with grid plan symbols (top) and with voltage sources and impedances (bottom)
Vinf is assumed to be independent of the power that the WT feeds into the HV grid. Therefore, the HV grid is called the infinite busbar and, consequently, its voltage is called Vinf.
If VWT exceeds Vinf, a current, IWT, flows, which in turn causes voltage drops along the feeder. The voltage drops occur in the cables and transformer because all these PS components impede the current flow. Hence, if current flows through these components, their impedances cause a voltage drop. Eventually, for the WT to feed power into the HV grid, it has to produce a voltage, which is large enough to exceed Vinf and all voltage drops along the feeder.
Hence, it can be said that the WT produces voltage, which causes a current (I) that is received by the grid. The grid produces a counter-voltage, which is received by the WT. In the following, it is briefly introduced how these PS quantities develop.
In AC PSs, the voltages are sine-waves, which are characterized by their magnitudes, their phase angles and their frequencies. The instantaneous values of the voltages in phases a, b and c are shown in Fig. 7. In PS analysis, it is often assumed that the waveform is sinusoidal at all times, and that the frequency is constant and equal to the rated system frequency (50 or 60 Hz). With these simplifying assumptions, the magnitude and the phase angle are the only variables, which characterize the voltage (and any other PS quantity). Hence, as long as these simplifying assumptions are valid, all PS quantities can be expressed as complex numbers, comprising a magnitude and a phase angle.

Instantaneous values of three-phase voltages
It has to be added here that in reality neither the waveform nor the frequency can be considered constant. The waveform can be distorted from harmonics, which is a disturbance with minor consequences. Nonetheless, harmonic distortion is a problem, which is addressed in grid codes. The grid frequency (50 Hz in Fig. 7) is proportional to the speed with which the generators rotate. This speed is a measure of the balance between generation and demand, which is why, in reality, it is hardly ever exactly at its rated value.
Impedances, Z, are complex numbers, which describe how they impede the current flow:
A resistance, R, causes a voltage drop and turns electric energy into heat:
The imaginary part, X, of an impedance, Z, is called reactance. A reactance can be made of a capacitance, C, or an inductance, L. Both capacities and inductances impede the current, but neither of them dissipates energy. Instead, capacities and inductances are energy storages. The degree to which they impede the current, however, depends on the frequency, i.e. it depends on the time available for charging these energy storages. The frequency, which in PS analysis is usually given in Hertz (Hz), has to be turned into an angular frequency, ω, in rad/s:
With ω, the voltage drop, which results when a capacity impedes current, can be calculated. It has to be noted, though, that this voltage drop is a steady state value. That is, this is the voltage drop that results after any transients in the process of charging the capacity have subsided:
The instantaneous voltage drop, which occurs during the charging and discharging of a capacity, can be computed with the following integral equation:
A capacity stores electric energy in the electric field between its poles. To illustrate the effect of the electric energy storage, the above equation is applied to derive the instantaneous voltage when a capacity is charged. To facilitate comprehensibility, a simple DC circuit is applied. However, the effect is directly transferable to AC. In the resistance-capacity (RC) circuit shown in Fig. 8, the capacity, C, is brought to a new state of charge, because the supply voltage, VDC, steps to a new value. The diagram on the right-hand side of Fig. 8 shows a qualitative time trace of the voltages.

Capacity, C, stores electric energy when it gets charged with the voltage VDC
The charging or decay time constant, τ, of an RC circuit depends on the capacity and the resistance:
The steady state voltage drop occurring at an inductance is also a complex number:
An inductance stores energy in the magnetic field. Hence, the instantaneous voltage drop caused by charging or discharging the magnetic field is derived with the following differential equation:
To illustrate the effect of the magnetic energy storages, the above equation is applied to derive the instantaneous voltage when inductance is discharged. Figure 9 shows a resistance-inductance (RL) circuit, which is initially energized to steady state. A short-circuit at the terminals drains the energy from the inductance. The diagram on the right-hand side of Fig. 9 shows a qualitative time trace of the voltage across the resistance. The voltage across the resistance is proportional to the current, which is provided by the inductance.

Inductance, L, is drained of its energy due to a short-circuit at the terminals of the RL circuit
The charging or decay time constant, τ, of an RL circuit depends on the inductance and on the resistance:
1.1.5 AC Power
Although power is also one of the PS quantities, it is discussed here in a separate subsection, because it is of outstanding importance for grid integration of WTs. Electric power is derived from voltage and current, both in instantaneous values (s(t)) and in complex numbers (S). (Note that the complex power is the complex voltage times the conjugate complex (*) of the current.)
To approach the problem, the instantaneous power resulting from current flowing through R, C and L (as introduced in Sect. 1.1.4) is shown in Fig. 10. The power of the shown 50 Hz signals is also a sine-wave, however, with double the frequency. In the case of R, the voltage and current are in phase. Hence, power is always a positive value. This means that the power flows in one direction, i.e. it flows into R, where it is turned into heat. Electric power, which can travel and which can be permanently transformed to other types of power, is called active power, P.

Instantaneous AC power in a resistance (top), in a capacitance (middle) and in an inductance (bottom). The left column shows how power results from voltage and current in one phase. The right column shows the power in all three phases
In the case of C, the current leads the driving voltage by 90°, while in L it lags the voltage by 90°. Consequently, in both cases the resulting power wave oscillates around zero. This means that the power flows in one direction in one half-wave, while it flows in the opposite direction in the other half-wave. That is, the power does not propagate, but it remains where it is. This kind of power is called reactive power, Q.
Figure 10 further reveals that the sum of all three-phase power sine-waves is a constant value. This is particularly important for rotating three-phase machines, as it means that the torque at their shaft is constant. Constant torque is advantageous because it does not cause mechanical vibrations.
A mixture of active power, P, and reactive power, Q, is the so-called apparent power, S, which can be expressed as a complex number:
Figure 11 shows S in the complex number plane. P is on the real axis and Q is on the imaginary axis. The angle φ between P and S is also the angle between V and I.

S, P and Q in the complex number plane
The power factor, cos(ϕ), is a commonly used variable that expresses to what extent apparent power is made of active power:
With the angle ϕ, the apparent power (just like any other complex PS quantity) can also be expressed in angle notation on the polar complex plane:
In angular notation, the magnitude |S| is the summation of the two orthogonal vectors P and Q:
In the example shown in Fig. 6, it was said that the voltage of the WT, VWT, has to exceed the voltage in the infinite busbar, Vinf, for a current to flow. To substantiate this statement, it first has to be defined in what way VWT has to exceed Vinf. Since both voltages are complex numbers, they are characterized by their magnitudes and their phase angles. Hence, there are two variables which can be different. In other words, there are two variables in the voltage to control the current, and hence, the power flow.
The WT feeder shown in Fig. 6 is mainly inductive, due to the massive inductance of the two transformers. For the purpose of explaining AC power flow, and for the sake of comprehensibility, the feeder is assumed to consist of an aggregated inductance only; see Fig. 12.

WT feeder simplified to one lumped inductance only
The voltage of the infinite busbar, Vinf, is considered the reference. Therefore, its angle is determined to be zero. The WT produces a voltage, which has a magnitude VWT and an angle δ with respect to Vinf. (The complex voltages in Fig. 12 are in angle notation).
The voltage difference
drives a current through the feeder with its impedance Z:
This allows computing the apparent power, which the WT feeds into the feeder:
P and Q, shown in Fig. 12, can be derived by decomposing the apparent power into its real and imaginary parts:
The above equations are used for generating the diagram shown in Fig. 13. In this diagram, Vinf is always kept unchanged: |Vinf| = 1.0 pu, while the magnitude of VWT is either |VWT| = 0.8 pu or |VWT| = 1.1 pu (#).

P and Q as function of angular difference between two voltages (delta), for a difference in voltage magnitudes of −0.2 pu (solid lines) and +0.1 pu (dashed lines, P# and Q#)
This diagram reveals that P is controlled best via the angular difference between the voltages. Q, on the other hand, can be controlled easily by varying the magnitude of one voltage source with respect to the other. This concept is well known from synchronous generators, where P is a function of the load angle (delta in Fig. 13) and Q is controlled with the excitation, which varies the magnitude of the terminal voltage of the synchronous generator.
This concept of controlling P with the angle and Q with the magnitude of a voltage source applies always. It does not matter whether the considered voltage source is a synchronous generator of a conventional power plant, an induction generator of Type I or Type II WT (see Sect. 1.2), a frequency converter of a Type III or Type IV WT or a quadrature booster (phase-shifting transformer).
1.1.6 Power System Stability
PS stability is divided into voltage stability and angular stability. Angular stability (also called synchronous stability) refers to the stability of the AC-connected rotating machines in the system, i.e. the PS frequency.
A PS is stable when it returns to an acceptable operating point, in all locations of the PS, after it has been upset by a disturbance [6]. As an example, Fig. 14 shows the oscillations in the generator speed after this generator has been upset by a transient short-circuit at its terminals. The oscillations subside and the final generator speed is, again, 1 pu. Hence, the system is stable, as the generator returns to an acceptable operating point.

Stable oscillation of the rotational speed of a generator after it has been upset by a short-circuit in the PS
An oscillation is stable when its magnitude decreases with time [7]. An operating point is acceptable when the PS can serve its purpose. This is particularly important in the context of voltage stability. After a voltage collapse at the end of a radial feeder (this is discussed in Sect. 2.3), the voltage might be permanently zero volts, while the rest of the system is in normal operation. Although this is a stable operating point, it is obviously not acceptable.
A comparable example of instability is conceivable when considering the PS frequency. A transient voltage drop can lead to excessive acceleration of a synchronous generator, such that it suffers pole slipping. That is, the rotor accelerates beyond synchronism. In this situation, the protection system will disconnect the generator and bring the prime mover to a standstill. Standstill is surely a stable operating point; however, since power production is impossible in a standstill, it is not an acceptable operating point.
Voltage stability is discussed further in Sect. 2.3, while frequency stability is the topic of Sect. 4.4.
1.2 Introduction of the Different WT Types
Different WT technologies are available on the market and potential technologies are discussed in scientific literature. When considering grid integration of WTs, different technologies have different implications for the grid. WT manufacturers pursue different technologies, but their basic concepts are comparable. Therefore, the different conceivable technologies are usually categorized into so-called WT types to make them independent of particular WT manufacturers [8]. In the following, these types are briefly introduced. In this chapter, only those technologies are considered which are relevant for grid integrated WTs of considerable size, i.e. which are suitable for MW-size WTs.
Grid code compliance is a driver for technological development. Some of the WT types introduced in the following have disappeared from most markets because it is economically unfeasible to make them comply with some of today’s grid code requirements. Other WT types were developed due to emerging grid code requirements.
1.2.1 Type I—Fixed Speed WTs with SCIG
This type of WT is invariably equipped with a squirrel cage induction generator (SCIG), which is directly connected to the AC grid; see Fig. 15. The SCIG is usually driven via a gearbox to achieve a synchronous speed of 3000, 1500 or 1000 RPM when connected to 50 Hz grids. Due to the substantial reactive power (Q) demand for excitation of the SCIG, the synchronization with the grid has to be done with a soft starter. After synchronization is completed, the soft starter is bypassed with a bypass switch. In steady state operation, the reactive power demand of the SCIG is covered by compensation capacitors (C), which are connected and disconnected depending on the voltage (V) or the power factor (cos(ϕ)) at the terminals of the SCIG.

Type I—fixed speed WT with or without power control via the pitch angle
Type I WTs can either be passive stall WTs, where the aerodynamic power is not actively controlled. Instead, the stall effect sets in automatically when the ambient wind speed leads to more than rated power. Alternatively, the power can be controlled via the pitch angle (θ) of the rotor blades. Since pitch angle control is not always contained in Type I WTs, the pitch control circuit is shown in gray in Fig. 15. In fixed speed WTs, the power can be controlled with the pitch angle either in the positive direction (pitch to feather) or in the negative direction (pitch to stall).
1.2.2 Type II—Semi-Variable Speed WTs with WRIG
A semi-variable speed WT is a speed-controlled WT; hence, the rotor speed is controlled with the pitch angle (invariably pitch to feather). In a Type II WT, a wound rotor induction generator (WRIG) is driven via a gearbox, as shown in Fig. 16. Just like in a Type I WT, also in a Type II WT the generator is synchronized with the grid via a soft starter, and the reactive power demand of the generator is compensated with controllable capacitors. Connected to the rotor windings of the WRIG is a variable resistor. Figure 16 shows that this is actually a constant resistor (R), which is bypassed by a DC chopper. The current, which can flow through R or the DC chopper, is the rectified current from the rotor windings. By controlling the current, which bypasses the resistor, it appears to the WRIG as if there were a variable resistor connected to its rotor windings. By controlling the virtual rotor resistance as a function of the rotational speed (ω) of the WRIG, a certain power operating point (Pref) can be realized. However, this speed variability causes reduced efficiency due to heat losses in the resistor (R); see Sect. 1.1.4. The crowbar in the rotor circuit is a safety measure to protect the DC chopper from harmful voltages in case of grid faults.

Type II—semi-variable speed WT with variable rotor resistance connected to a WRIG
1.2.3 Type III—Semi-Variable Speed WTs with DFIG
A doubly fed induction generator (DFIG) is a WRIG whose rotor terminals are connected to a back-to-back frequency converter, instead of variable rotor resistance. A Type III WT is basically a Type II WT with a DFIG, instead of a WRIG. The stator terminals of DFIG are directly connected to the grid. Hence, a DFIG behaves like a synchronous generator, where the excitation is controlled via the voltage in the rotor circuit. Whenever the rotational speed (ω) of the DFIG is different from the speed with which the stator field rotates, the frequency converter has to inject the excitation current into the rotor not as DC current, but as AC current with the slip frequency. That is, the frequency converter has to offset the difference between the rotational speed of the mechanical rotor and the stator field.
With the machine-side inverter (see Fig. 17), the load angle in the DFIG can be adjusted, i.e. the active power operating point (Pref) can be set, compared with Sect. 1.1.5. The reactive power, which the DFIG feeds via its stator terminals into the grid (Qref), can be varied by varying the magnitude of the voltage in the rotor of the DFIG. The grid-side inverter controls the DC voltage (VDC) in the DC circuit, by feeding power (Pset) into, or extracting Pset from, the DC capacitor (C). The grid-side inverter can further exchange reactive power (Qset) with the grid without interfering with the DFIG.

Type III—semi-variable speed WT with DFIG
Just like in a Type II WT, the crowbar in the rotor circuit is a safety measure to protect the machine-side inverter from harmful voltages in case of grid faults.
The speed variability of Type III WTs allows for optimizing the energy yield and limiting torque peaks in the mechanical structure of the WT. One of the main advantages of Type III WTs is that the frequency converter is relatively small; see Chap. 8. The consequence of this advantage is, however, that the speed range is limited.
1.2.4 Type IV—Full Variable Speed WTs
Type IV WTs are full variable speed because the generator is entirely decoupled from the grid frequency; see Fig. 18. The generators used in Type IV WTs can be SCIGs, electrically excited synchronous generators or a permanent magnet excited synchronous generators. The choice of generator makes a difference in the control of the excitation of the generator. In the case of an electrically excited synchronous generator, there can be an excitation controller, which varies the DC current in the rotor windings. In the case of a permanent magnet, excited synchronous generator or a SCIG the machine-side inverter has to vary the reactive power (Qref) in the stator of the generator to control the voltage of the stator.

Type IV—full variable speed WT with full-scale converter
Just like in a Type III WT, also here the machine-side inverter controls the active power, which is extracted from the generator (Pref). The grid-side inverter controls the DC voltage (VDC) in the DC circuit, by feeding power (Pset) into, or extracting Pset from, the DC capacitor (C). The reactive power, which a Type IV feeds into the grid (Qset), can only be produced by the grid-side inverter.
In the DC link of the frequency converter there might be a step-up converter (shown in gray in Fig. 18) to boost the rectified generator voltage in case of low rotational speed. Also optionally contained in the DC circuit is a braking chopper. The DC chopper might be necessary for dissipating power while the grid voltage is low. This is further discussed in Sect. 3.2.1.

Type V—variable speed WT with mechanical (hydraulic) torque/speed converter and electrically excited synchronous generator (SG)
1.2.5 Type V—WTs with Directly Grid-Connected Synchronous Generator
Type V WTs are comparable to Type II WTs. They are of variable speed and the generator stator is AC-connected to the grid. However, the main difference is the generator type. A Type II WT uses an induction generator, which is less advantageous for the PS, because of its reactive power demand. A Type V WT uses an electrically excited synchronous generator; see Fig. 19, which is favorable for the PS, due to the controllability of its reactive power exchange with the grid.
In Type II WTs, the speed variability is achieved with a slip in the generator. In Type V WTs, the speed variability is achieved with mechanical (or rather hydraulic) slip in the variable transmission stage between the main gearbox and the generator shaft [9].
From a PS’s point of view, this WT type is primarily advantageous because of its synchronous generator. It allows the WT to behave like a conventional power plant. The PS protection schemes, which are historically grown to fit synchronous generator-based power production, fit also Type V WTs [10].
1.3 Traditional Aspects of Grid Integration
Connecting a WT to a PS requires a suitable grid connection point. That is, the grid has to be capable of taking on the power from the WT. The suitability of a grid connection point is determined by, among other factors, the short-circuit ratio. The short-circuit ratio can be derived from the short-circuit power of the grid connection point and the rating of the connected wind power installation. The short-circuit power is a measure of the stiffness of the PS and is discussed in more detail in Sect. 2.2.
Physically connecting a WT to a PS does not only require a suitable grid connection point. The correct dimensioning of cables, transformers, switch gear, protection relays and potentially reactive power compensation equipment is premises for safe and reliable operation of the WT. All this equipment has to be selected and parametrized correctly to maintain permissible voltage variations, low flicker and acceptable harmonic distortions during the operation of the WT [4].
However, even perfectly dimensioned grid connection equipment of a WT cannot solve the problem of insufficient power transfer capability of the upstream grid. It is usually the responsibility of the PS operator to facilitate grid connection of WTs. That is, the short-circuit power at the grid connection point has to be sufficient. If this is not the case, grid reinforcements have to be carried out.
Insufficient power transfer capability can lead to thermal overloading of grid components like lines and transformers, and/or to unacceptable voltages. The thermal time constant of grid components is usually in the range of many seconds to minutes. Hence, thermal overloading is a slow process, which can be responded to in a closed control loop. However, too large power transfer leads to unacceptable voltage drops instantaneously [11].
If WTs are taken into operation although the power transfer capability of the grid is (still) insufficient, the power fed in by the WTs has to be truncated. This so-called feed-in management is usually carried out by the PS operator, who issues maximum power values, which must not be exceeded at the grid connection point of the WTs, i.e. at the point of common coupling. Due to the instantaneous response of the voltage, feed-in management is usually conducted in a precautious manner. Too large power transfer can lead to voltage instability, as discussed in Sect. 2.3, or harmful overvoltages, long before any PS component suffers thermal overloading.
Truncating the power of WTs means lowering the power setpoint of the WTs. Thereby, the energy yield of the WTs is reduced, which means financial losses for the owner of the WTs, unless compensating remuneration is payed. Besides the lower energy yield, feed-in management can also have an impact on the wear and tear in the WT [12]. Hence, it can shorten the service life of the WTs, which is indirectly also a financial loss.
In the beginning of the twenty-first century, many PS operators realized that the share of wind power has increased to an extent, which is no longer negligible. Consequently, WTs had to become reliable sources of power infeed, which meant that they were no longer allowed to disconnect from the grid when a system fault occurred [13]. Short-circuits can occur very frequently in many PSs. Hence, WTs are demanded to remain connected to the grid even in case of short-circuits, i.e. they are demanded to ride through low voltages, which is called “low-voltage ride through” (LVRT). LVRT has been the focus of research and development for a number of years [14].
Since all these aspects have been relevant in the past already, they shall not be discussed in detail in the current edition of this book. Consequently, this edition focuses on the topics, which have been emerging in recent years. These recent topics are introduced in the following section. Although LVRT is nothing new, it is nonetheless discussed in this edition for reasons outlined in Sect. 3.2.
1.4 Overview of Current Challenges of Grid Integration
The transition to renewable energies changes the role of WTs. In the past, they only supplemented the energy production of conventional power plants. These days, wind power is becoming one of the dominating generation technologies. Consequently, WTs have to take over the role of conventional power plants, which also means that they are becoming responsible for the stability of the PS. Therefore, this chapter focuses on the aspects of grid integration of WTs, which are related to this role reversal.
1.4.1 Grid Topology and Loading of Feeders
For the PS, the change in generation technologies means, primarily, that the number of generators increases dramatically. In the past, the power was produced by a few large power plants. The transition to renewable energies leads to a very large number of geographically dispersed generators. Hence, grid extensions into remote locations, and grid reinforcements of already existing remote feeders, become inevitable.
Since grid reinforcements and grid extensions are usually a lot slower than the installation of WTs, feed-in management will be necessary also in the years to come. To increase the wind energy yield and the degree to which the grid assets are utilized, feed-in management is likely to change. Currently, feed-in management demands WTs to operate at a low power setpoint, which is kept constant for several minutes to hours. In future, the power setpoint is likely to be adapted to the current loading of the grid continuously [11]. Hence, feed-in management will mean continuous power setpoint variations, which makes it comparable to grid frequency stabilization [15]. Consequently, this chapter does not focus on feed-in management as one of the dominant aspects of grid integration. Instead, PS stability with WTs is emphasized.
1.4.2 Power System Stability with Wind Turbines
The definition of PS stability is given in Sect. 1.1.6. It is important to note that the PS has to settle to an acceptable operating point in all locations. This is particularly important when considering the PS voltage. Since WTs are usually installed in remote locations, their grid connection point is often very weak, because the feeders leading to the WT locations are very long. Consequently, it might be difficult for the WTs to feed in their power while maintaining acceptable voltages [16]. The PS voltage is introduced in Sect. 2. The voltage stability at the end of a radial feeder, which is usually the type of feeder used for connecting WTs, is discussed in Sect. 3.
The definition of PS stability does not only apply to the PS voltage but also to the PS frequency. In this context, it is particularly important to note that the PS frequency is a result of the balance between generation and demand. The power consumption usually varies permanently. Increases or decreases in consumption can be anticipated to some extent, but apart from this vague anticipation, the consumption varies without prior warning. Hence, the generation in a PS has to be adapted to consumption. In the case of a PS, which is highly penetrated with wind power, WTs have to be able to adjust their power to the demand. Decreasing the power output of a WT is easy to realize, but increasing the power output, beyond the power in the wind, is only possible with an energy storage. An additional challenge in maintaining the balance between generation and demand with WTs is that the prime energy of WTs, i.e. the wind, is bound to vary unforeseeably, too. The PS frequency is introduced in Sect. 4 and the capability of WTs to participate in the stabilization of the PS frequency is discussed in Sect. 5.
1.4.3 Inertia Contribution and Short-Circuit Current Contribution
A side effect of the transition to renewable energies is that conventional AC-connected generators are replaced by frequency converters. In the case of state-of-the-art WTs, frequency converters decouple the electromechanical generator from the PS. Hence, the transition to renewable energies leads to a reduction in PS inertia, which makes the control of the PS frequency a difficult task [17].
Another side effect of replacing AC-connected, rotating generators with frequency converters is that the short-circuit current is reduced [18]. Short-circuit current is important for detecting, locating and clearing short-circuits in a PS. Without substantial short-circuit currents, a PS can operate in faulted conditions unnoticed for an indefinite period of time. Synchronous condensers, which are basically electrically excited synchronous generators without prime movers, are proposed as a means of improving the short-circuit contribution of wind farms with Type III and Type IV WTs [19].
Types I, II and V WTs do not cause these problems. However, they are no longer state-of-the-art and are therefore hardly applied in newly built wind farms.
It has to be noted that the focus of this chapter is on the grid integration of WTs. Hence, additional wind farm equipment, like synchronous condensers, is not discussed any further. Alternative WT technologies, which would solve the problem of low PS inertia contribution and low short-circuit current contribution, are proposed in the scientific literature [20]. Such technologies would avoid additional wind farm equipment, but cannot be found on the WT market, and are hence irrelevant for current PSs.
1.4.4 Grid Code Requirements
The requirements for connecting WTs to PSs vary from country to country, but all these requirements have in common that they strive for maintaining PS stability with the help of WTs. Requirements regarding voltage and frequency control and operating ranges, in particular LVRT, have been stipulated in European grid codes for many years [21]. Beyond these requirements also power quality, like flicker and harmonic distortion, communication with WTs and wind power forecasting, as well as requirements specifically for offshore wind farms, exist in many, also non-European, countries [22]. In the United States of America, the requirements for connecting WTs to the grid are different for the different states [23].
If WTs are to participate in balancing generation and demand, it might be inevitable to apply energy storage. Potentially, PS operators consider such energy storage as additional equipment, instead of considering them as being part of a wind farm. In this case, different requirements might apply specifically to the energy storage and their grid connection infrastructure [24].
Examples of current grid codes, or requirements, which are comparable to these, are mentioned in the context of the grid voltage in Sect. 3 and in the context of the grid frequency in Sects. 4 and 5.
1.4.5 Mechanical Loads Resulting from Grid Services
It has to be noted that the newly emerging grid services have an increasing impact on the mechanical loads on the structure of the WT. Mechanical loads, i.e. wear and tear in the mechanical part of a WT have, strictly speaking, no influence on the capability of WTs to provide grid services. However, mechanical loads can reduce the service life of a WT. As a consequence, the levelized cost of energy from a WT is affected by the mechanical loads. The price per kilowatthour (kWh) has a direct influence on energy trading, which is the basis for the power exchange in the grid. Therefore, also information about the mechanical loads, which result from the considered grid services, is given in the following sections. It has to be noted, though, that neither detailed load analysis nor specific energy costs are mentioned, as this would be beyond the scope of this chapter.
2 Power System Voltage
When a WT feeds its power into a PS, current has to flow through the different grid components before the generated power arrives at the consumer. All grid components are characterized by their impedances, which cause voltage drops when current flows through them. The most important grid components are generators, cables, overhead lines and transformers, as these are mainly responsible for the voltage drops caused by power transfer.
2.1 Equivalent Circuits of Power System Components
An equivalent circuit is a theoretical connection of basic electrical elements, which exhibits the same electrical behavior as the PS component, which it has to represent. Since all PS components impede current, equivalent circuits comprise impedances. However, as already introduced in Sect. 1.1.4, reactances can be expressed in terms of complex numbers if only the steady state is of interest. The instantaneous electrical behavior results from the fact that both inductances and capacities are energy storages. Hence, the integral Eq. 11 and the differential Eq. 14 need to be applied in order to also assess the instantaneous behavior of grid components.
The equivalent circuits of all PS components have to represent the voltage drop that occurs when current flows through them. When a WT is integrated into a PS, the voltages, which result from the power that the WT feeds into the grid, are of interest. Therefore, in the following the relation between current and voltage is considered. This consideration is extended to the relation between power and voltage in Sect. 2.2.
As introduced in Sect. 1.1.2, in PS analysis the three phases are reduced to one equivalent phase, whenever the loading of the three phases is equal enough to consider them identical. Therefore, the equivalent circuits shown here are also single-phase equivalents of the three-phase PS components.
2.1.1 Generators
A WT can, as any other generator, be considered an infinitely stiff voltage source behind an impedance. Infinitely stiff means that the source voltage is not affected by the current, which is drawn from this source. Since this would be unrealistic, there has to be an impedance, which causes a voltage drop as a function of the current; see Fig. 20. Generally, generators in an AC PS behave inductive. Rotating electro-magnetic machines comprise coils for producing the magnetic field, which links the stator and the rotor. Frequency converters comprise filter chokes at their terminals for making their current sinusoidal. Hence, all types of generators that can be found in the different WT types (see Sect. 1.2) behave inductive. Therefore, they can be represented as voltage sources behind inductances; see Fig. 20.

Voltage source behind an inductance (or impedance) representing the electrical behavior of a generator
If the operating point of a generator changes, the magnetic energy stored in the inductance changes, too. Transients in the voltage lead to transients in current; see Fig. 9. Hence, when representing the instantaneous behavior of a generator, the voltage across the inductance has to be expressed with the differential Eq. 14. For the sake of simplicity, it is desirable to avoid differential equations in PS analysis whenever possible. In this case, the inductance is expressed as impedance or reactance; see Eq. 13. However, changes in the energy stored in an inductance cannot be represented realistically with steady state impedances. Therefore, as a trade-off, the inductance of a generator is represented with different reactances, depending on the state of operation of the generator: subtransient reactance (XS″—applies initially after the occurrence of a transient event), the transient reactance (XS′—applies in the transition from transient to steady state) and the synchronous reactance (XS—applies in steady state operation).
Voltage source frequency converters, which are commonly used in WTs, do not only comprise an inductive filter choke. There is also a DC capacitor as energy storage between the AC/DC inverter and the DC/AC inverter; see Chap. 8. Both energy storages, as well as the inductance of the rotating generator, have substantial charging time constants (Eqs. 12 and 15), which can be in the same order of magnitude as the mechanical time constants of a WT. These energy storages have a bearing on the choice of the reactances in the equivalent circuit. Besides, they are not only of interest for assessing the grid behavior of a WT but also for assessing the dynamic behavior of the WT itself.
2.1.2 Lines and Cables
Overhead lines and underground (or subsea) cables can be represented with the so-called π-model. Figure 21 reveals that power lines are resistive (there is inevitably resistance (R) involved, which dissipates energy), inductive (L) and capacitive (C). Resistance and inductance are in the length path, i.e. they are affected by the current, which flows through the cable. The capacity is in the shunt path and is divided among the two ends of the line. It has to be noted that the π-model is only applicable to short lines. Longer lines are series connections of π-models.
The difference between an overhead line and an underground or subsea cable is the insulation material. Overhead lines use air as insulation material, which is cheap, universally available and self-healing (more about this in Sect. 2.4). Underground cables use plastics, paper and/or oil as insulation material, which have a much higher insulation voltage than air. Therefore, the distance between the conductors in a cable is by orders of magnitude smaller than the distance between conductors in an overhead line.
The setup of the π-model reveals that the inductance and the resistance cause the voltage drop, ΔV, when the line is loaded. The capacity, on the other hand, dominates the behavior when the considered line is only lightly loaded, or even open circuit.
Both the inductance and the capacity are affected by the distance between the conductors (the distance between phase conductors or the distance between phase and ground). Besides the distance, d, also the length, l, the radius, r, of the conductor, as well as the permeability of the insulation material, μ0, determine the inductance:
The capacity is furthermore affected by the dielectric coefficient of the insulation material, ε:
Comparing Eq. 25 with Eq. 26 reveals that with increasing distance between the conductors (d), the inductivity increases and the capacity decreases. Consequently, overhead lines are primarily inductive, while underground cables are primarily capacitive.
Looking at the equations Eqs. 10 and 13, it becomes obvious what different effects the capacity in the shunt path and the inductance in the series path of a line have: The inductance causes a voltage drop whenever the line is loaded. The capacity, on the other hand, is a negative reactance when exposed to AC voltage. That is, it generates reactive power. When this reactive power flows through the series impedance of the line, a voltage drop occurs in the negative direction. Hence, when the line shown in Fig. 21 is only lightly loaded or even open circuit on the receiving end, the voltage on this end, V2, increases. This phenomenon is particularly relevant for offshore wind farms, where the subsea cables are often very long, and where the applied voltage is as high as somehow possible to minimize losses. Therefore, offshore wind farms are often connected via HVDC links to the onshore AC grid. If an AC connection is chosen, inductive reactors need to be installed in the wind farm to absorb the reactive power generated in the cables. Otherwise, the voltage in the wind farm can reach destructive values when the wind farm exchanges only a little power with the onshore AC grid.

π-model of an overhead line or an underground cable
2.1.3 Transformers
A transformer is inductive and resistive (losses). In contrast to lines and cables, transformers have no capacity, which is of relevance for PS considerations. Therefore, the equivalent circuit of a transformer looks as shown in Fig. 22.

Transformer model in per unit representation, comprising inductance and resistance
The task of a transformer is to step the voltage up or down from one voltage level to another. Hence, it might be surprising to see the equivalent circuit of a transformer in Fig. 22, where the primary voltage, V1, and the secondary voltage, V2, are identical as long as no current flows. Here, it is important to note that different voltage levels are dealt with best when using the per unit (pu) representation as introduced in Sect. 1.1.3. When applying the pu system, the voltage levels disappear, and the current appears to flow through a transformer like it does when it flows through a line.
2.2 Power System Stiffness and Short-Circuit Power
A PS, where power is produced in generators and transmitted to the loads via lines and transformers, exhibits voltage drops, which depend on the flowing current. The voltages at the terminals of the generators and the loads have to be in particular ranges, as it otherwise might be destructive for the grid equipment and/or unusable for the consumers.
How much the voltage in a PS responds to the current is called the PS stiffness. A stiff PS exhibits rather constant voltages, even when the current varies considerably. The PS stiffness can be quantified by the short-circuit power and the short-circuit ratio.
The short-circuit power is the power, which an infinite busbar feeds into a short-circuit. Figure 23 visualizes the concept. The case shown is the WT feeder already shown in Fig. 6 and simplified to Fig. 12. In Fig. 23, the WT is replaced by a short-circuit, into which the infinite busbar with its voltage, Vinf, drives the short-circuit current ISC.

Short-circuit in a PS
Hence, the short-circuit power is in single-phase pu representation:
When a short-circuit suppresses the voltage to zero, the whole voltage of the infinite busbar has to drop along the line (Vinf = ΔV). Therefore, the short-circuit power can also be expressed with the short-circuit impedance, ZSC, and the short-circuit current, ISC:
Unfortunately, the short-circuit power is not easily applicable to a particular WT to be connected to the PS. The short-circuit power has to be put into perspective with the rated power of the WT, SWT. For this purpose, the short-circuit ratio, SCR, is introduced:
When considering a grid connection point for a WT, the suitability of this connection point can be quantified in terms of the short-circuit ratio. The ranges given in Table 1 are defined by Boemer [16].
In the example in Fig. 5, which is further applied in Fig. 23, the simplification is made that the whole feeder between the infinite busbar and the WT (or the short-circuit) is purely inductive. This is, of course, not entirely true. In reality, there is always some resistance related to any conductor. Therefore, it is more realistic to consider the short-circuit impedance a complex number comprising a real and an imaginary part:
In PS analysis, usually power flow is considered rather than current flow. (Current only becomes indispensable when the voltage is faulted and potentially suppressed to low values.) Power flow yields immediate insight into the loading of a PS and into the operating points of its components. Therefore, it would be advantageous to have an expression for the voltage drop, ΔV, which comprises active and reactive power, rather than current. The relation between voltage drop and real and imaginary part of the apparent power (i.e. P and Q) can be derived graphically from the phasor diagram of a closed voltage loop. The derivation of this phasor diagram is beyond the scope of this chapter. Applying this graphical methodology to the circuit shown in Fig. 12, and applying Eq. 30 as an expression for the impedance of the conductor, leads to the expression in Eq. 31. (The sending end voltage is Vinf.)
However, the phasor diagram would reveal that the part of ΔV, which is projected onto the imaginary axis, is negligibly small. Hence, as a good approximation, the voltage drop, ΔV, can be expressed with the following expression in terms of active power, reactive power and short-circuit impedance:
From this relation, it becomes obvious that not only the short-circuit ratio is of interest but also the relation between reactance and resistance. This so-called X over R ratio describes the nature of a PS. Transmission of the active power, P, is the inherent purpose of a PS. Therefore, there is no way ΔV can (or rather should) be controlled with active power. Instead, reactive power, Q, should be used to control the voltage, while the intended active power is transmitted. Consequently, it would be advantageous if the PS was dominated by reactance and if resistance was as small as possible. Small resistance means little power losses, i.e. high efficiency, while large reactance provides good control over the voltage via reactive power. Table 2 summarizes the connection between X/R ratios and voltage levels.
In transmission systems, the X/R ratio is usually between 8 and 10, while in distribution systems it is often well below 6.
2.3 Voltage Stability
Remembering the definition of PS stability (see Sect. 1.1.6), it is particularly important to remember that it applies to any location in the PS. Remembering also that voltage is controlled best with reactive power (see Sect. 2.2) leads to the dedicated definition of voltage stability: Voltage stability is the ability of a PS to control the voltage, V, with reactive power, Q, in any location of the PS. That is, the V-Q sensitivity has to be positive at every busbar in the PS.
The problem can be described with a radial feeder, where a generator, e.g. a WT, feeds power into one end and a load receives the power at the other end; see Fig. 24.

Radial feeder with line impedance, Zline, to which a generator is connected on one end and a load with impedance Zload is connected to the other end
The generator end of the line is considered to be the reference. Therefore, the angle of the generator voltage, V1, is considered to be 0°. Consequently, the voltage at the receiving end, Vload, varies in magnitude and angle, δ, according to the voltage drop, ΔV, across the line impedance, Zline.
The purpose of generators is to provide the consumers with active power. Therefore, the active power flowing into the load impedance is shown on the horizontal axis of the diagram in Fig. 25. The reactive power, on the other hand, is a means of controlling the load voltage at any desired active power operating point. In order to quantify the share of these two power components, the commonly used power factor is applied; see Eq. 18. Figure 25 shows the voltage versus load power for different power factors. Positive power factor means capacitive, i.e. leading power factor, which corresponds to an overexcited operation of a synchronous generator. (In the example of Figs. 12 and 13, this corresponds to a WT voltage, VWT, larger than the voltage at the infinite busbar, Vinf). Negative power factors refer to inductive, i.e. lagging power factors, which corresponds to underexcited operation of a synchronous generator.

Receiving end voltage versus active power for different power factors illustrating voltage collapse at radial feeder
Figure 25 shows that active power can be increased to a certain point, beyond which the voltage collapses. Considering neutral power factor (cos(ϕ) = 1), i.e. active power transfer only, the load voltage decreases with increasing power. The maximum active power transfer can only be extended by reducing the power factor to capacitive operation. (Inductive (negative) power factors make the situation even worse).
Figure 25 suggests that any arbitrary active power transfer could be achievable if only sufficient reactive power is fed into the feeder. However, Eq. 16 has to be kept in mind, which makes clear that an increase in power comes at the cost of increased current. Eventually, the conductors of the feeder will be overloaded thermally if active and reactive power lead to excessive current.
The above-mentioned definition of voltage stability refers to voltage versus reactive power sensitivity. Therefore, Fig. 26 shows the load voltage as a function of reactive power. (Obviously, not all active power operating points in Fig. 25 can be considered in Fig. 26). Stable operating points are those which are above the voltage collapse point in Fig. 25. In Fig. 26, stable operating points are characterized by positive slopes in the voltage versus reactive power curves. That is, a PS is stable when it can increase the voltage with increased reactive power infeed in all locations, and vice versa.

Receiving end voltage versus reactive power for different active power operating points in Fig. 25
2.4 Transient Voltage Drops
The voltage in a PS is hardly ever constant. As discussed in the previous sections, it varies with the loading of the system. While it is the intention of PS operators to maintain the voltage within certain boundaries, this is not always possible. It has been discussed above that particularly the reactive power has a strong influence on the voltage. In situations where large amounts of reactive power are transmitted through the system, the voltage is bound to vary strongly, too. Connection of large inductive loads, e.g. the magnetization of a large induction machine, can cause local and temporary voltage drops below the lower boundary of the normal voltage range.
Another common cause for transient voltage drops is short-circuits in the system. Conductors, which use air as insulation material, e.g. overhead lines or busbars in substations, are particularly prone to suffer short-circuits. A short-circuit in air causes an arc consisting of ionized air. Hence, an arc is highly conductive. Due to the high conductivity of ionized air, the short-circuit current, which the PS voltage drives into an arc (compare Fig. 23), is very large. Large short-circuit currents cause large voltage drops along the lines in which they flow. Therefore, short-circuits can be sensed as voltage drops, not only in the location of the short-circuit but also in neighboring grid locations.
The disadvantage of using air as an insulation material is that short-circuits can happen quite frequently. Contaminations on insulators or lightning strikes on overhead lines are frequently occurring system disturbances. On the other hand, the advantage of using air as an insulation material is that it is self-healing. If the current supply to an arc is interrupted, the arc extinguishes and the insulation strength of air recovers within hundreds of milliseconds. Therefore, protection relays in PSs open the circuit breakers on either side of a line, as soon as a short-circuit is detected on this line. After opening the circuit breakers, the protection relays wait for about one second, before they close the circuit breakers again. This so-called auto-reclosure intends to extinguish arcs in anticipation that the initial cause for the short-circuit (e.g. dirt on insulators or lightning strike) has gone. If after closing the circuit breakers the short-circuit re-occurs, the procedure might be repeated once or twice, depending on the resilience of the affected PS components.
Short-circuits can occur between the three phases, between two phases, between three or two phases and earth, or between one phase and earth. These different fault types have different consequences for the PS. Most severe are three-phase short-circuits, however, these occur only rarely. The most common type of short-circuit is the single-phase-to-earth fault.
Short-circuits are perceived as transient voltage drops by consumers and generators, which are connected to the PS in the vicinity of the fault location. Most consumers do not even notice transient voltage drops. If the consumers notice it at all, they might find it a nuisance, e.g. because of flickering light intensity from electric illumination. Hardly any consumer disconnects from the grid, merely because of a transient voltage drop. Hence, the standard is that consumers resume power consumption as soon as the voltage recovers.
In contrast to consumers, for rotating generators, the consequences of transient voltage drops at their terminals are a lot more severe. While the voltage is low, the electric power is potentially low, too. In the extreme, when the voltage is suppressed to zero volts, the electric power has to be zero; see Eqs. 16 and 17. The electric power can drop almost instantaneously. The electric torque of a rotating generator depends on the electric power and the rotational speed. If the electric power drops steeply, also the electric torque has to drop steeply. This means that the electric output torque drops almost instantaneously, while the mechanical driving torque of the generator is still there in unchanged extent; see Fig. 27.

Mechanical input torque, Tmech, driving the inertia, J, of a generator, which produces the electric output torque Telec
The rotational speed of a generator, ω, is affected by the imbalance between driving torque, Tmech, and output torque, Telec, which act on the inertia, J, of a generator.
Hence, transient voltage drops invariably lead to the acceleration of rotating generators. However, this acceleration must not lead to the disconnection of the generators, because the consumers stay connected to the grid and resume power consumption despite the transient voltage drop. If generators disconnect because of acceleration, the balance between generation and demand is upset. As a consequence, a local transient voltage drop could lead to system-wide instability in the grid frequency. This is further discussed in Sect. 4.
3 Voltage Stability with Wind Turbines
Favorable locations for WTs are usually determined by the wind potential, and not normally by the location where the electric energy is needed. Therefore, most WT feeders are radial feeders reaching out to the WT locations and bringing the power of the WTs to the PS. Hence, WTs have to be able to maintain acceptable voltages at the end of radial feeders, as discussed in Sect. 2.3.
The radial feeder setup also poses problems in the case of short-circuits near the WT. While the short-circuit is on, the voltage is suppressed and leads to the acceleration problem introduced in Sect. 2.4. However, while the protection relays try to clear the fault, it is likely that the WT is in open-circuit operation. That is, it has no connection to the rest of the PS to export decelerating power, until the auto-reclosure.
3.1 Voltage Support with Wind Turbines
Since WTs are an indispensable part of the generation mix in many PSs, the requirements in terms of voltage support are comparable to the requirements demanded from conventional power plants with synchronous generators. The voltage support requirements are usually stipulated in terms of reactive power at a given active power operating point. Figure 28 shows an example, where the active power, P, is given in pu (referred to the rated active power, Prated) on the vertical axis. The demanded reactive power, Q, is also given per rated active power, Prated. In the example requirement shown in Fig. 28, the blue dashed line is the boundary of the operating range which has to be achievable. This requirement looks similar to the P − Q requirements in many grid codes. It is the worst-case scenario taking the requirements of several countries into account [21]. The WTs, which have to fulfill these requirements, have to be capable of providing reactive power (up to 0.1 kVAr/kWrated capacitive or inductive), even when the wind does not allow for active power production. During active power production, the capacitive reactive power requirement is slightly more extensive (reaching up to 0.48 kVAr/kWrated) than the inductive one, because many PSs are mainly inductive. That is, they need reactive power production to compensate for the reactive power demand of lines and transformers.

Exemplary P − Q requirement (blue dashed line) for voltage support with reactive power. The current for fulfilling this requirement (red line) is given for grid voltage = 0.9 pu
The demanded reactive power even at full active power (P = 1 pu) means that the current rating of the WT has to be considerably larger than what is needed for rated active power only. To illustrate this problem, Fig. 28 also shows the current in pu (on the basis of rated active power and rated voltage) for a slightly suppressed voltage of 0.9 pu. The current is derived with Eqs. 16 and 20. The red current curve in Fig. 28 shows clearly that the grid connection equipment of WTs, which have to fulfill such reactive power requirements, have to be suitable for permanent currents that are about 20% larger than the rated current.
The ability to support the grid voltage is highly dependent on the WT type, i.e. on the generator technology. The comparison of the different WT types in Sect. 1.2 reveals that there are WTs with and without power electronic frequency converters. The beauty of frequency converters is that they can produce reactive power independent of the active power operating point. By varying the magnitude of their source voltage, they can increase or decrease the reactive power production or absorption independently of the active power; compare with Fig. 13. The voltage in the DC circuit and the current rating of the frequency converter are the only limits.
The WT Types I and II have generators, which need to import reactive power for magnetization. These WTs can only compensate the reactive power demand of their generators with additional compensation equipment, e.g. capacitors; see Figs. 15 and 16. These so-called capacitor banks consist of single capacitors, which are connected and disconnected with contactors. The reactive power demand of the induction generator depends on the active power operating point, which varies with the wind speed.
Compensating the reactive power demand of the generator, and at the same time supporting the grid voltage with reactive power, as shown in Fig. 28, requires the installation of large capacitor banks. Hence, grid voltage support is only possible to a limited extent, with limited precision and with limited response speed. If requirements as shown in Fig. 28 are to be fulfilled with Type I or Type II WTs, the effort in additional compensation equipment is substantial. The consequence might be that the economic advantage of these WTs is no longer given.
Type III WTs can provide reactive power via the grid side inverter, or with the machine side inverter via the excitation of the DFIG; see Fig. 17. Fulfilling the requirements shown in Fig. 28 means that either the grid side inverter or the machine side inverter and the generator have to be rated to permanently larger currents.
Type IV WTs have a full-scale converter (see Fig. 18), which can provide any active and reactive power. However, the current rating of this frequency converter has to be chosen to permanently sustain currents larger than rated. The response speed is, as typical for frequency converters, more than sufficient, which is favorable for grid voltage support.
Type V WTs comprise synchronous generators, which are usually electrically excited, and directly connected to the grid; see Fig. 19. The P − Q behavior of such WTs is very comparable to conventional power plants. In part load, the active power, i.e. the load angle, delta, in the synchronous generator varies with the wind speed; see Fig. 13. Varying load angle means that the excitation has to be varied too, if a certain reactive power is to be maintained, as specified in Fig. 28. Electric excitation systems are usually sufficiently quick for varying the reactive power of a synchronous generator, at least as quickly as the load angle varies.
3.2 Low Voltage Ride Through with Wind Turbines
Some of the most demanding grid code requirements revolve around the ability to ride through transient voltage drops. This functionality is called low voltage ride through (LVRT). The LVRT capabilities of the different WT types [14] are discussed in the following, as LVRT has various implications for the grid and for the WTs.
3.2.1 Drive Train Acceleration and Active Power Recovery
As indicated in Sect. 1.3, LVRT is dealt with here, although it has been a state-of-the-art requirement for many years already. From a PS’s point of view, LVRT is an important functionality of generators, as outlined in Sect. 2.4, and LVRT with WTs is a game changer for two reasons: (i) In many PSs, the generated power from WTs exceeds the generation from conventional power plants, which are based on AC-connected synchronous generators. (ii) The LVRT capabilities of variable speed WTs are a lot more advantageous compared to those of conventional power plants.
During a transient voltage trough, WTs, like all other rotating generators, accelerate (see Eq. 33), because of the inevitable imbalance between mechanical driving power, Pmech, and electric power that can be exported despite the suppressed voltage, Pelec:
Hence, WTs have to accumulate the excess power, ΔP, for the duration of the voltage trough, t, in the form of kinetic energy, Ekin:
The angular speed ωstart is the speed of the WT at the time of the voltage drop, while ωend is the speed at voltage recovery.
The drive train of a WT exhibits substantial flexibility in torsional direction, which is why it can be represented as a spring-mass-oscillator, as depicted in Fig. 29. If such a drive train experiences a voltage drop, i.e. if Telec drops, while the aerodynamic driving torque, Trot, remains unchanged, also the torsional stiffness, k, of the drive train gets unloaded. The twist angle, β, by which the drive train is twisted due to the loading, is reduced. An instantaneous unloading of such a flexible drive train causes the inertia on the low-speed shaft, Jlss, and even more so the inertia on the high-speed shaft, Jhss, to oscillate against the torsional stiffness. Hence, the drive train accelerates not only because of the accumulation of excess driving power but also because of the oscillations to which it gets excited by the step change in Telec.

Mass-spring-damper model of a WT drive train comprising a gearbox
Looking at Fig. 15, it becomes obvious that Type I WTs can only perform LVRT if there is a pitch control, which allows reducing the rotor torque with the pitch angle, θ, when the drive train accelerates. Otherwise, the time available before the induction generator has exceeded its breakdown slip is extremely short. After exceeding the breakdown slip, a squirrel cage induction generator provides only little torque, which invariably leads to overspeeding.
For the WT structure, the steep power variations, during the voltage drop and the voltage recovery, invariably mean harmful steep torque variations, due to the constant rotor speed. Different solutions to these problems have been proposed in the literature. One of them is the slip-synchronous concept, where the advantages of synchronous generators are combined with the slip variability of induction generators to be used in Type I WTs [25].
All other WT types are of variable speed, which means that they control their speed with the pitch angle; see Figs. 16, 17, 18 and 19. Hence, all these WTs can mitigate the acceleration by reducing the aerodynamic driving torque, although the speed, with which the pitch angle can be varied, is slow (only up to about 10°/s, in the case of small WTs, and less than that in multi-MW WTs).
The simplified control circuit of a variable speed WT, as shown in Fig. 30, comprises the speed control loop and the power control loop. This control circuit applies to the WT Types II, III, IV and to some extent also to Type V. The power is controlled with the power electronic converter (except for WT Type V), depending on the measured generator speed, ωgen. The generator speed is controlled with the speed controller, which varies the pitch angle accordingly.

Simplified control circuit of a variable speed WT with speed control via the pitch angle and power (torque) control via the frequency converter
The control circuit in Fig. 30 reveals that the speed controller responds automatically if LVRT leads to an increase in generator speed beyond rated speed, ωref. Due to the low response speed of the pitch drive, the speed controller can only respond adequately to longer voltage drops. In case of short voltage drops, too drastic pitch angle variations can lead to undesirable power dips once the voltage recovers. The speed controller has to find a trade-off between overspeed and undershooting the desired speed due to oscillations. Oscillations in the generator speed are normally damped by controlling the electric power, i.e. the generator torque accordingly. This is obviously not possible while power export to the grid is hampered due to low grid voltage. Hence, also generator speed oscillations can lead to undesirable operating points once the grid voltage recovers. When the voltage recovers, the active power infeed is, again, determined by the power controller with the power versus speed characteristic. If the generator speed happens to be on a downswing in its oscillation, or if the pitch angle is too large, in the time the grid voltage recovers, the active power might be too low and needs to be ramped up quickly.
Figure 31 shows exemplary LVRT requirements that span the requirements of different countries [21]. The vertical axis in the diagram in Fig. 31 shows the voltage in pu, while the horizontal axis shows the duration of a transient voltage drop. The time 0 s is the beginning of a transient voltage drop. The red curve contours the operation region, which has to be possible. Operation above the red curve is required without disconnecting the WT from the grid. Below the red curve, i.e. when the voltage drops deeper and/or for longer than what is contoured with the red curve, the WT may disconnect, or has to disconnect from the grid. This is stipulated in the applicable grid codes.

Exemplary LVRT requirement [21]
The requirement shown in Fig. 31 reflects the acceleration problem discussed above. The deeper the voltage drops, the less the electric power can be exported to the grid. That is, less electric torque is available in a WT for mitigating the drive train acceleration. Consequently, the deeper the voltage drops, the shorter the time, during which operation has to be sustained. The higher the value to which the voltage drops, the less kinetic energy has to be accumulated, and the less severe the excitation to oscillations. Therefore, longer LVRT is demanded because pitch control can, although it is slow, avoid dangerous overspeeds.
The steep torque variations, resulting from voltage drops and voltage recoveries, pose a burden for the mechanical structure of a WT. The same applies to overspeeds, which can develop during voltage troughs. The acceleration of a WT drive train can be mitigated with quick pitching of the rotor blades. However, this limitation of the rotational speed comes at the price of harmful variations of the aerodynamic thrust, which causes fatigue, mainly in the WT tower [26]. Some Type IV WTs mitigate mechanical loads by applying braking resistors in the DC circuit of the full-scale converter; see Fig. 18. A braking chopper controls the power, which is absorbed from the DC circuit, and dissipates it in braking resistors. These heat losses compensate for some of the electric power, which cannot be fed into the grid while the voltage is low.
3.2.2 Reactive Current Provision
As discussed in Sect. 3.1, WTs have to feed reactive power into the grid in order to support the grid voltage. Voltage support is even more important when the voltage is low due to a fault in the system. In the case of LVRT, it is impracticable to specify the demanded voltage support in terms of reactive power, because power varies with voltage. Therefore, whenever the voltage is outside the tolerance range of normal operation, the voltage support is specified in terms of reactive current. Figure 32 shows an exemplary reactive current requirement. In this requirement, the WT has to feed its rated current in the form of reactive current, already when the voltage has dropped to 50% of the rated voltage. The reactive current only serves the grid voltage. However, if a WT also wants to mitigate its acceleration problem, as discussed in Sect. 3.2.1, it also has to feed active current into the grid. Consequently, the grid connection equipment of a WT has to be designed to temporarily sustain considerably larger currents than rated current.

Exemplary reactive current, Iq, requirement for voltage support. Diagram based on E. ON Grid Code—High and extra high voltage, 1. April 2006
Type I and Type II WTs are hardly able to provide sufficient reactive current with their compensation capacitors alone. Hence, unless such WTs are supplemented with power electronic reactive current sources like static synchronous compensators (STATCOM), they cannot fulfill common reactive current requirements for voltage support during LVRT. It has to be mentioned, though, that induction generators temporarily feed substantial reactive currents into the grid, when the grid voltage drops. This reactive current results from the fact that the magnetic energy in the coils of the generator gets drained. A comparable effect is shown in Fig. 9. Therefore, this reactive current cannot be sustained. But, even worse, this reactive current has to be imported from the grid when the voltage recovers and the generator needs to get re-magnetized again. Absorbing reactive current (i.e. inductive current) hampers the voltage recovery, and is, therefore, undesirable from a PS’s point of view.
Type III and Type IV WTs can provide the required current if their frequency converters are designed to be overloaded temporarily. (More on this problem in the following Sect. 3.2.3). The synchronous generators in Type V WTs can be overloaded quite heavily for several seconds. This is well-known standard technology from conventional power plants.
3.2.3 Short-Circuit Current Provision
Whenever a short-circuit is the cause of a voltage drop, the protection relays in the PS have to detect this fault, they have to locate the fault location and they have to isolate the fault location. For this purpose, it is crucial that short-circuits cause short-circuit currents. In contrast to reactive current provision for voltage support, short-circuit currents are primarily needed at the beginning of a short-circuit. Hence, durable provision of short-circuit current is not needed.
Short-circuit currents can only be provided by generators or energy storages. In a PS, all capacitive and inductive devices are energy storages. A prime example is the induction machine, which is the generator in Type I and Type II WTs, and which is often used as a motor in rotating consumers. As explained in Sect. 3.2.2, induction machines provide a current when they get de-magnetized. This does not only apply when they run as generators but also when they operate as motors. The short-circuit current contribution of different generator types and different WT types is summarized in Table 3.
The short-circuit current provision of the different WT types depends on the short-circuit type (how many phases involved, with or without the involvement of the earth) and on the operating point of the WT prior to the fault [18]. The values given in Table 3 are maximum values.
Synchronous generators, as contained in conventional power plants and in Type V WTs, provide very large short-circuit currents when the voltage at their terminal drops. A further advantage of electrically excited synchronous generators is that they do not absorb reactive current from the grid when the grid voltage recovers. Instead, the excitation system takes care of the re-magnetization.
A Type III WT can provide short-circuit currents larger than rated due to its similarity to squirrel cage induction generators when the crowbar is fired for protecting the frequency converter. This, however, is seldom the case, as LVRT with Type III WTs is normally done with the frequency converter in fully controlled operation. If the crowbar is not fired, a doubly fed induction generator is also similar to a synchronous generator due to its electric excitation from the machine side inverter and due to its directly grid-connected stator terminals. The similarity of these two generators depends on the slip, i.e. on the speed difference between the stator field and the rotor.
The power electronic interface between Type IV WTs and the grid is a strict limitation of short-circuit current. Power electronic frequency converters can hardly be overloaded. Therefore, they need to be over-dimensioned substantially to be able to provide satisfactory short-circuit currents. Alternatively, the short-circuit current of a Type IV wind farm has to be provided by synchronous condensers, which are installed as extra equipment in the wind farm. The red current curve in Fig. 28 shows the minimum current rating for this reactive power requirement in normal operation. If a Type IV WT is dimensioned to fulfill this requirement, its frequency converter has to be able to sustain permanent operation with 1.23 pu current (referred to rated power at rated voltage). This means that this Type IV WT is capable of providing a short-circuit current of a bit more than 1.23 pu for a fraction of a second. An example of how frequency converters adjust their operation to suppressed and potentially unsymmetrical grid voltages is introduced and discussed in Chap. 8.
4 Power System Frequency
The PS frequency is the frequency with which the voltage in the system alternates. In Figs. 7 and 10, the period of the voltage is 0.02 s, i.e. the frequency of the PS, to which these voltages belong, is 50 Hz. An AC PS can be considered a rotating machine. The power is produced with rotating generators, and it is driven through the PS with alternating voltage. The frequency of this AC voltage is proportional to the rotational speed of the generators. Figure 33 visualizes the concept, where two exemplary AC machines are connected to each other via a transmission line. In each machine, the magnetic field links the rotor with the stator. Hence, the rotational speed, ω, of the rotor fields and the stator fields are identical in both machines.

Two AC machines with their inertias J1 and J2 are connected via magnetic fields, with their north (N) and south (S) poles, and a transmission line. Therefore, both rotors rotate in synchronism with the angular speed ω
The angular speed, ω in radians per second, can be translated into a frequency in Hertz with Eq. 9, which is the commonly used unit for PS frequency. In the case of a machine with one pole pair, as shown in Fig. 33, this equation translates the mechanical speed into the electrical grid frequency.
4.1 Frequency Control
The speed of a generator, i.e. the frequency of the AC voltage that it produces, is determined by its mechanical prime mover. In the case of multiple AC-connected generators, the speed of the magnetic fields in all generators has to be identical, at least in steady state. The consumers and the transmission losses absorb the power which the generators produce. If the produced power and the consumed power are in balance, the rotational speed, i.e. the electrical frequency, is constant. If the generated power exceeds the consumption, the frequency rises; and it declines if the consumption exceeds the generation.
Since the grid frequency is directly connected to the balance between generation and demand, PS operators do not need to know the demand precisely in order to adjust the power of the generators. Controlling the electric frequency in the grid by adjusting the generation, such that the frequency is at its desired value, automatically adjusts the generation to the prevailing demand. Obviously, PS operators have to have a vague idea of the demand to be expected. Otherwise, excessively many power plants would need to be connected to the grid in anticipation of potential power demand. Therefore, a large fraction of the consumed power is traded beforehand on the energy market. The consumption of, for example, private households is not known precisely in advance. However, the behavior of the consumers is predictable as it repeats itself according to the so-called load profile. The load profile is historic data of consumption over the hours of a day, over the days of a week and over the weeks of a year. The remaining uncertainty in consumption has to be catered for by control power plants, which adjust their power according to the deviation of the grid frequency from its rated value.
Hence, control power plants can only respond after an imbalance between generation and demand has led to a discrepancy in grid frequency, which implies a delay. However, control power plants cannot respond arbitrarily quickly. Therefore, it is important that an imbalance does not lead to too steep frequency excursions. Otherwise, the limit for acceptable frequency values might be exceeded before the control power plants were able to respond. This is discussed further in Sect. 4.2.
Figure 34 illustrates what happens when the frequency deviates slightly from the rated frequency (which is normal PS operation), and when frequency thresholds are exceeded.

Operation of a PS in the different frequency ranges
When the frequency deviates from its rated value, there are also some consumers, which help restoring the balance. These so-called frequency-sensitive loads vary their power consumption as a function of the grid frequency. A prime example is fans, which are driven by AC-connected motors. The power of a fan varies with the cube of its rotational speed. The rotational speed of an induction motor is determined by the grid frequency and its loading. Hence, when the grid frequency drops, the speed of the motor drops and this lets the power demand of the fan drop, too. Consequently, the motor absorbs less power from the grid, which is advantageous for the grid, because the decline in frequency indicates that more power should be generated, or, alternatively, less power should be consumed.
4.2 System Inertia
In Sects. 2.4 and 3.2.1, the problem of acceleration resulting from an imbalance between driving power and decelerating power is discussed. Although in these sections the discussion revolves around rotating machines which experience an imbalance because of transient voltage drops, the situation is perfectly comparable to the situation in an AC PS, where the generation does not fit the consumption. Equation 33 describes the acceleration of a rotating machine in general. As shown in Fig. 33, an AC PS is a rotating machine, too. It is further known that power is the product of torque and speed, which is why the electric power in a synchronously rotating machine (or in a whole AC PS) results from the grid frequency (Eq. 9) and the electric torque, Telec:
Knowing that in a PS not only the consumers absorb power (Pload) but also the transmission losses (Ploss) allows reformulating Eq. 33 to represent the acceleration of the angular velocity in a PS:
The inertia Jsys is the system inertia, i.e. the aggregated inertia of all directly AC-connected generators and consumers.
Looking at Eq. 37, it becomes obvious that the speed, with which the grid frequency varies, depends on the inertia in the PS. In other words, the time mentioned in Sect. 4.1, which has to be allowed for control power plants to respond, increases with increasing inertia. Therefore, PS inertia is a premise for the controllability of the grid frequency; i.e. only if a PS behaves inertial, its frequency varies slowly enough to be controllable.
The inertia, Jsys, is a value in kgm2 and could, in principle, be derived if the geometry of all synchronously connected machines were known. While it might be possible to have the necessary data about the connected generators, it is entirely impossible to acquire this information about the rotating loads, which are connected to the PS at a time. Just like generators, rotating loads contribute to PS inertia, provided that their motors are AC-connected. If there is a frequency converter connected between an electric machine (generator or motor) and the PS, the inertia of this rotating machine does not inherently contribute to PS inertia.
Identifying the inertia contribution from consumers is realistically only possible by analyzing the time traces of the grid frequency in transient events, preferably in small PSs. The system in Great Britain reveals a load inertia share of about 20% of the total system inertia [27]. In a small islanded system in Germany, which resulted from a system split, and which spread only about 55,000 connected consumers, the inertia share of the consumers could be identified to be 21% of the total system inertia [28].
4.2.1 Inertia Constant, H
The inertia in kgm2 is not only difficult to identify, but it is also rather useless, as it does not quantify the inertial behavior of a PS in an illustrative manner. However, inertia in motion stores kinetic energy, Ekin; see Eq. 35. Simplifying Eq. 35 leads to the overall kinetic energy contained in inertia:
To get a practicable measure of the inertial behavior of a single rotating machine, like a power plant, or of a whole PS, the following situation is assumed. The considered rotating electric machine runs at rated speed while it is loaded with its rated electric power. Then, the driving torque at its shaft is set to zero instantaneously (this is practically hardly possible, but conceivable for the sake of this theoretical assumption). In order to continue producing rated electric power, the machine can only tap the kinetic energy stored in its inertia (Eq. 38), as this is the source of energy that it is left with.
Dividing the stored kinetic energy, with its unit Watt-seconds (Ws), by the rated power, with the corresponding unit Watt (W), leads to the so-called inertia constant, H:
Hence, the inertia constant is the time in seconds, in which the rotating machine can continue producing rated electric power, after it lost its driving torque. Figure 35 visualizes the concept, where an electric machine with inertia constant H = 3 s loses kinetic energy because it produces rated power from a rated speed (50 Hz) to a standstill.

Kinetic energy is extracted from a mass with H = 3 s, which rotates with the frequency f, and which produces rated power from 50 Hz all the way down to standstill
This is obviously a theoretical consideration, as rated power at very low speeds is impossible. However, the inertia constant is a very practical measure to quantify the inertia independent of the size of the considered machine. Figure 35 illustrates quite well what Eq. 38 suggests: It is advantageous to operate a PS close to its rated frequency. The lower the frequency gets, the softer the inertia responds, i.e. the quicker the speed drops while maintaining the demanded power.
Table 4 gives an idea of realistic inertia constants of different AC-connected conventional power plants. Inertia constants of state-of-the-art WTs are deliberately omitted, as they do not inherently contribute to the system inertia, which is further discussed in Sect. 5.1. The system-wide inertia constant is derived with Eq. 40 using the inertia constants and rated powers of all AC-connected rotating machines, where i is the counter that runs through all machines:
In Eq. 40 also, the values of the AC-connected rotating consumers, as discussed above, have to be considered.
4.2.2 Power from Inertial Response
An imbalance between generation and demand is instantaneously taken care of by the inertia in a PS. This means, for the duration of the imbalance, the missing power is delivered by inertia. Hence, it is of interest how this power is derived and how it is related to the rotational speed of the inertia. The previously introduced Eq. 35 can be applied. It defines the kinetic energy, Ekin, when the rotational speed (in this context the speed of the synchronously rotating machines in the grid) varies from an initial grid frequency (ωstart—consider Eq. 9) to a final grid frequency (ωend), which is reached until control power plants step in. Hence, with the kinetic energy the instantaneous power from the inertial response can be derived:
Equation 41 reveals that power from the inertial response is a function of the grid frequency and of the derivative of the grid frequency. The derivative of the grid frequency is commonly referred to as the rate of change of frequency (ROCOF):
Equation 41 is further proof of what is already shown in Fig. 35: The inertial power, which caters to the imbalance between generation and demand, can be easier provided at higher grid frequencies. Hence, the frequency should not sag too deeply but should be kept within tight limits.
Equation 41 further reveals that if the inertia in a PS is low, the ROCOF has to be large to produce the needed power. The inertia in a PS is, as outlined above, largely unknown, but the ROCOF can be measured easily. Hence, the occurring ROCOFs allow characterizing a PS. With the transition to renewable energies, many power plants of the types listed in Table 4 are replaced by photovoltaic systems or WTs. That is, synchronously connected rotating generators are replaced by frequency converters. While photovoltaic systems do not even possess any rotating masses, WTs of Type III and Type IV do not contribute their inertia to the grid inertia, because of their frequency converters. Consequently, it can be observed that with progressing transition to renewable energies, the ROCOFs increase.
From the perspective of PSs, it is unfortunate that Type III and Type IV WTs are the most commonly used WTs. However, the controls of such WTs can be modified to provide the grid with synthetic inertia, as discussed in detail in Sect. 5.1.
4.3 Damping Sub-synchronous Oscillations
Figure 33 illustrates the situation of AC PSs. Rotating masses are synchronously connected to each other via transmission lines. In this context, it does not matter whether the inertias are single machines, like power plants, or whole grid regions. If two areas in a PS are connected to each other via one tie line, the inertias in each area can be aggregated to one single equivalent inertia. The load angles, δ1 and δ2 in Fig. 33, characterize the operating points of the connected machines (or grid regions). The load angles are the angles on the horizontal axis in the diagram in Fig. 13.
Figure 33 further illustrates that the inertias are linked to the transmission line via the magnetic fields (blue lines) in the airgaps between the stator and rotor. Magnetic fields are flexible links between the mechanically rotating mass and the electric power in the transmission line. Elongating the magnetic field lines, i.e. increasing the load angle, δ, requires a torque, T. Hence, the setup shown in Fig. 33 is an electromechanical oscillatory system comprising a mechanical inertia, J, and an electro-magnetic spring. The stiffness, k, of this electro-magnetic spring (in Newton meter (Nm) per radian) is determined by the excitation of the involved machines:
Hence, potential energy is stored in the elongated electro-magnetic spring:
Obviously, the inertia stores kinetic energy as given by Eq. 38. With these two types of energy, the premise for oscillation is given. If the system shown in Fig. 33 is excited, e.g. by a load change or a transient voltage drop, it oscillates with the frequency ωswing:
In Eq. 45, the two inertias, J1 and J2, behave like equivalent inertia, Jeq:
Likewise, also the two stiffnesses, k1 and k2, of the magnetic fields, can be aggregated to an equivalent stiffness, keq:
In an AC PS, the voltage is desired to oscillate with the fundamental frequency of the PS; i.e. in land-based PSs typically with 50 or 60 Hz. The electromechanical oscillations, however, are undesired sub-synchronous oscillations. The frequency of such electromechanical oscillations can vary in a wide range. They also vary with time, as they depend on the loads and the generators connected to the considered PS. In the study on the Nordic grid, the observed frequencies in the different locations ranged from 0.3 to 0.8 Hz [31]. Tests in the Finnish grid revealed frequencies in the range of 0.6–1 Hz [32]. In general, the frequency of electromechanical grid oscillations is in the range of 0.1–0.7 Hz when considering inter-area oscillations. The frequencies of local grid oscillations can be expected to be above that and in the range of 0.7–2 Hz, while oscillations of single machines are typically with frequencies above 2 Hz [33].
These oscillations are obviously grid frequency oscillations, as the swinging of the rotors, of the considered machines, is superimposed on their rotational speed. Hence, the load angles, δ, of the machines oscillate around their mean value. Figure 13 shows that variations in load angle mean variations in active and reactive power. Considering the situation shown in Fig. 33, these power oscillations mean increases and decreases in the power to be transferred through the transmission line. The danger of such power swings is that the transmission line might get temporarily overloaded and taken out of operation by its protection relays. Hence, sub-synchronous electromechanical oscillations can cause system splits and eventually blackouts. Therefore, they need to be damped before they get out of hand.
Damping sub-synchronous electromechanical oscillations is done with so-called power system stabilizers (PSS). The definition of damping, D, is torque, T, proportional to speed of motion of the oscillation, ωswing:
Considering the likely frequencies of sub-synchronous oscillations, as mentioned above, this means that active power variations have to be realized with frequencies between 0.1 and 2 Hz. Such active power variations cannot be realized with the controls of most mechanical prime movers. Therefore, it is realized with the electrical excitation of, for example, synchronous generators, as shown in Fig. 36.

Block diagram of a synchronous generator (SG) with controls of the electrical excitation system and Power System Stabilizer (PSS) impacting the excitation system
Varying the excitation of a generator varies the voltage at its stator terminals. However, the excitation does not only influence the reactive power, which primarily determines the voltage, but also the active power. Figure 37 shows a fraction of Fig. 13 with arrows indicating the sequence of events that take place when active power needs to be varied rapidly.

Different active and reactive power operating points of a voltage source, e.g. a synchronous generator, during power system stabilization at constant mechanical driving power. 1: increase in excitation; 2: excess power generated from kinetic energy → decline in load angle; 3: reduction of excitation → power drops below mechanical driving power; 4: recovery of load angle and power
A transition from one state of excitation to another is shown with arrow 1 in Fig. 37. Not only the reactive power but also the active power is increased because the excitation is increased. If the mechanical driving power remains unchanged, the additional active power is generated from the kinetic energy in the rotor. Consequently, the rotational speed drops (arrow 2), until the excitation is reduced (arrow 3) to allow for the initial operating point to recover (arrow 4).
Such variations in active power can be realized rapidly and also periodically. Hence, periodic rotor speed oscillations (i.e. grid frequency oscillations) can be damped without having to control the mechanical prime mover.
4.4 Frequency Stability
Frequency stability is the ability of an AC PS to maintain an acceptable frequency and synchronism throughout the whole system. This means that it must be possible to maintain the frequency with the mechanisms shown in Fig. 34. Neither a steady state situation nor a transient event must lead to system splits, which would disintegrate a PS into several islands.
Hence, frequency stability is based on the availability of sufficient control power to cater to unforeseeable imbalances between generation and demand (see Sect. 4.1). In order for this control power to be able to respond without violating frequency limits, sufficient inertia is needed in the system as a premise for the controllability of the frequency (see Sect. 4.2). Finally, if transient events excite the system, sufficient damping power is required to avoid those oscillations leading to disconnection of PS components (see Sect. 4.3), which could cascade into a blackout.
5 Frequency Stability with Wind Turbines
Considering the definition of frequency stability in Sect. 4.4, the current section assesses the ability of WTs to contribute to frequency stability.
All WT types introduced in Sect. 1.2 have the ability to control their power output, except for WT Type I in passive stall design. Hence, these WT types can adjust their power output to support the grid frequency. Since the kinetic energy in the wind cannot be stored, WTs can only increase their power output in case of dropping grid frequency if they were in throttled operation beforehand. Power variations can be realized quite rapidly, in particular with WTs of Type II, Type III and Type IV, because these WTs control their power output with power electronics. But even the WT types, which rely on pitch angle control to vary their aerodynamic driving power, are capable of varying their power faster than conventional power plants.
However, irrespective of how the power is controlled, variations in the operating point inevitably excite the structure of the WT to vibrations. Figure 29 illustrates the problem for the WT drive train. However, also other WT components, like the tower and the rotor blades, are prone to vibrations. As an example, Fig. 38 shows a simplified Campbell diagram of the NREL 5 MW references WT [34], where only the first eigenmodes of the most important WT components are plotted versus the rotational speed in per unit. The basis for the per unit conversion is the synchronous speed of the generator [35].

Campbell diagram with the first eigenmodes of some WT components of the NREL 5 MW reference WT
WTs are continuously excited to vibrations by their rotation and by turbulent wind. Mechanical vibrations can have a direct impact on the active power operating point; see Fig. 30. From the perspective of the PS, oscillating power infeed should be avoided, as this could, potentially, excite electromechanical oscillations in other PS components.
5.1 Inertial Response of Wind Turbines
Any WT, whose generator is AC-connected to the PS, inherently behaves inertial. This means that WTs of Type I and Type V behave inertial, i.e. they provide power from the inertial response, whenever their generators are connected to the grid. WTs of Type II, Type III and Type IV only provide power from the inertial response when their power electronics are deliberately controlled to do so. When such WTs adjust their power to the changes in the grid frequency, i.e. the absolute value of the frequency and the rate of change of frequency (Eq. 41), they behave similar to synchronously connected rotating machines. Hence, they behave inertial in a controlled manner; i.e. they provide inertia not inherently but synthetically [36]. This emulates real inertia, which is a way for grid operators to maintain controllability of the grid frequency, even in the case of high penetration with wind power [37]. For a WT, this way of controlling its active power means partially decoupling its controls from its available prime energy, i.e. the wind speed.
A technique to make voltage source converters behave similar to synchronous machines is the so-called virtual synchronous machine (VSM). A VSM allows controlling a frequency converter such that it responds to transients in the grid voltage and the grid frequency similarly favorably as synchronous generators do it. In some respects, VSMs even behave more favorably than real synchronous machines, e.g. in terms of damping of sub-synchronous oscillations. In other respects, like short-circuit current contribution, they are tied to the physical constraints of the frequency converter hardware, and hence, perform a lot worse than real synchronous machines [38]. Some general details on how frequency converters in WTs can be controlled are discussed in Chap. 8.
However, irrespective of how a particular active power behavior is achieved with a frequency converter in a WT, this active power has to be drawn from the generator of the WT. Active power in a generator means torque, hence, inertial response has an influence on the rotational speed and on the mechanical structure of the WT. To take the needs of a variable speed WT into account, which is bound to be exposed to varying wind speeds, and at the same time to satisfy the need for reliable inertia provision in the grid, the variable inertia constant (Hvar) controller was proposed [39]. The main advantage of this controller is that it avoids the risk that the WT disconnects from the grid when during low wind speeds a large negative ROCOF (steep drop in grid frequency) requires a large increase in power. A variable speed WT with Hvar controller behaves like a synchronous generator. However, unlike a synchronous generator, the rotational speed of a WT is not constant. In an AC-connected synchronous generator, the rotor speed varies with the grid frequency only. That is, it is almost constant. In a variable speed WT, however, the rotational speed is not determined by the grid frequency, but by the wind speed. Hence, it can vary in a wide range; see the horizontal axis in Fig. 38. Therefore, the Hvar controller varies the inertia constant, which is emulated by the WT, according to the current rotational speed. As shown in Fig. 39, the inertia characteristic of such a WT reaches the demanded inertia constant when the rotor rotates with rated speed. At cut-in speed, the emulated inertia constant is zero. Consequently, the synthetically provided inertia of the WT is a function of the kinetic energy contained in the drive train of the WT.

Inertia characteristic of an AC-connected generator with inertia constant = 6 s (green) and 12 s (yellow). Inertia characteristic of a variable speed WT with Hvar controller and demanded inertia constant H_dem = 6 s (blue) and H_dem = 12 s (red)
Comparing the demanded inertia constants shown in Fig. 39 with the inertia constants of conventional power plants listed in Table 4, it becomes obvious that synthetic inertia can exceed real inertia by far. The demanded inertia constant H_dem = 12 s is just an example. Studies have shown that the inertia contribution with this exemplary inertia constant yields good results for the PS and has virtually no impact on the energy yield [15]. The ability of WTs to avoid a blackout has also been tested with simulations of a real blackout scenario [40].
The active power provision from inertial response has an inevitable effect on the torque, and hence, the mechanical structure of the WT. Therefore, the influence of this permanent partial decoupling of the active power control from the prevailing wind speed has been assessed. It was found that WTs can provide synthetic inertia in most operating points, and for most conceivable grid frequency events, reliably, without undue effect on their lifetime [41].
Combining Eq. 41 with Eqs. 38 and 39 while applying Eq. 42 allows deriving the demanded power from the desired inertial response:
This power from inertial response enters into the control circuit of a variable speed WT as shown in Fig. 40. It has to be noted that Pinertia is added to the power reference for the frequency converter with a negative sign. That is, a negative ROCOF (df/dt) has to cause the WT to inject extra active power into the grid.
If a WT is to support the grid frequency with inertial response only, the sign of Pinertia is bound to alter frequently. Therefore, Pinertia is not likely to have a lasting effect on the rotational speed of the WT drive train.
5.2 Fast Frequency Response with Wind Turbines
In this section, the support of the grid frequency with control power from WTs is discussed. It is obvious that any WT type, which can control its power, is suitable for reducing its power output in case of too high grid frequency. Therefore, in the following only power increases, which are necessary when the grid frequency is too low, are discussed.
To avoid confusion, the terminology shall be introduced first. It has to be noted that different, and in some cases contradicting, terminology can be found in the literature. In this chapter, the convention used by Eriksson et al. is applied. Hence, fast frequency response refers to power adaptations based on grid frequency deviations. This is in contrast to the inertial response, as introduced in Sect. 5.1, where the deliberately produced power adaptations, called synthetic inertia, are primarily driven by the rate of change of frequency [36].
As an example, in this section fast frequency response is described according to the requirements stipulated for the Canadian grid in Quebec [42]. It is particularly important to note that in this grid code the response to frequency deviations is called inertial response. To avoid confusion, in the chapter at hand the term fast frequency response is used instead.
Hydro Quebec demands WTs to inject a minimum power for a minimum duration and with minimum ramp rates if the grid frequency drops below a certain threshold. This type of power provision for grid frequency support is particularly suitable for generators with small energy storage. That is, it is suitable for WTs which can access the kinetic energy in their drive trains.
Depending on the rotational speed, variable speed WTs have different amounts of kinetic energy stored in their drive train. Figure 41 shows the power versus speed characteristic of the variable speed WT already discussed in Fig. 38. The green curve is the power versus speed characteristic for normal continuous operation. The red characteristic is for the temporary power increase by 0.1 pu, as demanded in the above-mentioned grid code [42]. Maintaining this power increase in part load for the demanded duration of 10 s causes kinetic energy to be extracted from the drive train and, consequently, the speed to drop as shown by the blue horizontal lines. After the 10 s have elapsed and the power is released again, the power drops back to the normal power versus speed characteristic, but at a lower value, as indicated by the orange vertical lines.
Fast frequency response in full load operation beyond rated wind speed is obviously trivial, as there the wind speed usually contains sufficient kinetic energy; hence, the WT can produce extra power merely from the wind.
The power demand offset called P_FFR in Fig. 41 enters into the control circuit of a variable speed WT as shown in Fig. 40 at the same summation point where Pinertia enters; however, P_FFR would be added with a positive sign.

Simplified control circuit of a variable speed WT with power offset for inertial response realized via the frequency converter

Power versus speed characteristic of variable speed WT. Power increase by 0.1 pu of rated power for fast frequency response, resulting in speed delta and following power drop
For the purpose of illustrating fast frequency response operation, a part load operating point is simulated. To have a realistic case, the reference incident as defined by ENTSO-E [43] is chosen; see top diagram in Fig. 42. Fast frequency response as required by Hydro Quebec is applied (bottom diagram in Fig. 42); although Hydro Quebec operates a 60 Hz grid, the requirement can be adapted to 50 Hz grids. The threshold for activation of fast frequency response is set to −10 mHz, which also complies with the restrictive grid code of the Irish 50 Hz grid [44]. To improve comprehensibility, the scenario shown in Fig. 42 considers a non-turbulent constant wind speed of 11 m/s. The simulated Type IV WT exhibits the characteristics shown in Figs. 38 and 41.

Fast frequency response of a variable speed WT. (1) Grid frequency drops, (2) WT power is increased beyond its initial part load operating point, (3) the speed drops because kinetic energy is extracted from the drive train and (4) the recovery phase is inevitable for returning to the previous operating point
Figure 42 reveals the major disadvantage of fast frequency response with WTs in part load operation. The extra power can only be provided from kinetic energy in the drive train, as this is the only energy storage available in a state-of-the-art variable speed WT. However, extracting kinetic energy invariably means that the rotational speed drops. Consequently, the power has to be reduced after a few seconds, in order to return to the optimal rotational speed. The period of reduced power and increasing speed is called the recovery phase. This recovery phase comes at a time when the PS is in desperate need of more power, not less, because the grid frequency (top diagram in Fig. 42) has still not returned to its rated value yet.
An alternative approach for supporting the grid frequency with control power from WTs is to apply a droop characteristic. In the case of dropped grid frequency, a droop characteristic calls for a power increase, which is proportional to the depth of the frequency drop and which potentially lasts for a long time. This is the approach commonly applied in conventional primary frequency control power plants. Such long-term extra power provision cannot be sustained from kinetic energy in the drive train of a WT. Instead, precautious down-regulation of the WT is the only way of realizing this kind of control power supply [37]. The downside of this approach is that it potentially leads to very large losses in wind energy yield.
5.3 Power System Stabilization with Wind Turbines
The concept of PS stabilization, as introduced in Sect. 4.3, can be transferred to any generator, also to WTs. It is particularly important to note that the likely frequencies of sub-synchronous oscillations change with increasing shares of frequency converter-based generation. Since frequency converters decouple the inertia of a generator, e.g. a WT, from the PS, the overall inertia in a PS is bound to decrease, as discussed in Sect. 4.2. Consequently, the frequency of sub-synchronous oscillations is bound to increase with progressing transition to renewable energies, as suggested by Eq. 45. It can be expected, though, that this increase in frequency ωswing will be moderate, because the real inertia is partially substituted by synthetic inertia, as discussed in Sect. 5.1.
Since electromechanical grid oscillations are grid frequency oscillations, it could be suspected that PS stabilization is identical with inertial response or fast frequency response. However, neither is the case as fast frequency response is only active when a certain frequency threshold is exceeded. Grid frequency oscillations can threaten system stability even if their magnitude seems harmless, as discussed in Sect. 4.3. Inertial response, on the other hand, is mainly driven by the derivative of the grid frequency (ROCOF). Hence, its power is 90° out of phase with the grid frequency oscillations; therefore, it does not contribute to damping.
The concept of PS stabilization has been proposed in the past already for the application of Type I WTs, which can vary their power output solely with the pitch angle [45]. The performance of PS stabilization in fixed speed WTs was assessed with simulations of electromechanical oscillations in the Nordic grid [31]. The concept of PS stabilization in a synchronous generator was adapted to Type IV WTs, where the DC capacitor voltage was controlled similar to the excitation control in a synchronous generator [46]. Also, other methods of PS stabilization with WTs are conceivable [33]. However, all these methods have in common that active power is extracted from the grid in case the frequency swings beyond its steady state value, and that extra active power is injected when the frequency swings below its steady state value. Type III or Type IV WTs can emulate PS stabilization by periodically varying the reactive power infeed. The obvious advantage of this approach is that WTs can provide PS stabilization independent of wind speed [32]. Independent of the wind speed means, on the other hand, that the generator is not involved. Therefore, the frequency converter cannot exchange active power, as a synchronous generator does (see Fig. 37), when its reactive power is varied via the excitation. Hence, this method is not comparable to conventional PS stabilization. Instead, the damping effect in the grid is caused by the resistances of lines and cables, which act as braking resistors when the injected reactive power flows through them.
A Type V WT, with its AC-connected synchronous generator and its electrical excitation system, can obviously perform conventional PS stabilization as explained in Sect. 4.3. Type III and Type IV WTs can perform conventional PS stabilization with their frequency converters, as long as their generators are in operation. In this case, the controls of the frequency converter can vary the load angle, δ, as shown in Fig. 37. The resulting active power is then exchanged between the generator of the WT and the PS.
Periodically varying the power of the generator obviously excites the mechanical structure of the WT to vibrations. Comparing the exemplary eigenfrequencies of the 5 MW WT shown in the Campbell diagram in Fig. 38 with the possible frequencies of grid oscillations mentioned in Sect. 4.3 reveals that it is very likely that PS stabilization excites WTs to vibrations. Therefore, PS stabilization is among the most demanding grid services, which is why it is not commonly demanded from WTs, yet.
Literatures
UN, United Nations Framework Convention on Climate Change (UNFCCC). https://unfccc.int/. Accessed 02 Aug 2021
IEA, Renewables 2020—Analysis. https://www.iea.org/reports/renewables-2020/wind. Accessed 02 Aug 2021
Global Wind Energy Council (2021) Global Wind Report 2021. https://gwec.net/global-wind-report-2021/. Accessed 02 Aug 2021
Schaffarczyk A (2014) Understanding wind power technology, theory, deployment and optimisation. Wiley, Chichester, UK. ISBN: 978-1-118-64751-6
Weedy BM, Cory BJ (1998) Electric power systems, 4th edn. Wiley
Kundur P (1994) Power system stability and control. McGraw-Hill, New York, NY, USA
Nise NS (2000) Control systems engineering, 3rd edn. Wiley, Hoboken, NJ, USA
Yaramasu V, Wu B, Sen PC, Kouro S, Narimani M (2015) High-power wind energy conversion systems: state-of-the-art and emerging technologies. Proc IEEE 103(5):740–788. https://doi.org/10.1109/JPROC.2014.2378692
Voith Turbo Wind GmbH & Co. KG, Windstrom einzigartig erzeugen – Die WinDrive-Technologie. https://voith.com/cn/990_d_cr355_de_voith-windrive-fuer-windturbinen.pdf. Accessed 12 Aug 2021
Beckhoff Automation GmbH & Co. KG, DeWind mit neuem Antriebssystem für Windkraftanlage D8.2 – Neues Konzept für amerikanischen Markt, PC-Control 02 | 2008. http://www.pc-control.net/pdf/022008/solutions/pcc_0208_dewind_d.pdf
Jauch C, Gloe A, Hippel S, Thiesen H (2017) Increased wind energy yield and grid utilisation with continuous feed-in management. Energies 10:870. https://doi.org/10.3390/en10070870
Jauch C, Gloe A (2016) Improved feed-in management with wind turbines. In: Proceedings of the 15th wind integration workshop, Vienna, Austria
Jauch C, Matevosyan J, Ackermann T, Bolik S (2005) International comparison of requirements for connection of wind turbines to power systems. Wind Energy 8(3):295–306. https://doi.org/10.1002/we.160
Hiremath R, Moger T (2020) Comprehensive review on low voltage ride through capability of wind turbine generators. Int Trans Electr Energ Syst 30(10). https://doi.org/10.1002/2050-7038.12524
Jauch C, Gloe A (2019) Simultaneous inertia contribution and optimal grid utilization with wind turbines. Energies 12:3013. https://doi.org/10.3390/en12153013
Boemer JC (2016) On stability of sustainable power systems-network fault response of transmission systems with very high penetration of distributed generation. Technische Universiteit Delft. https://doi.org/10.4233/uuid:78bffb19-01ed-48f9-baf6-ffb395be68a0
Tielens P, Van Hertem D (2016) The relevance of inertia in power systems. Renew Sustain Energy Rev 55:999–1009. https://doi.org/10.1016/j.rser.2015.11.016
Muljadi E, Samaan N, Gevorgian V, Li J, Pasupulati S (2010) Short circuit current contribution for different wind turbine generator types. In: IEEE PES general meeting, pp 1–8. https://doi.org/10.1109/PES.2010.5589677
Jia J, Yang G, Nielsen AH, Muljadi E, Weinreich-Jensen P, Gevorgian V (2018) Synchronous condenser allocation for improving system short circuit ratio. In: 5th international conference on electric power and energy conversion systems (EPECS), pp 1–5. https://doi.org/10.1109/EPECS.2018.8443358
Ockhuis DK, Kamper M (2021) Potential of slip synchronous wind turbine systems: grid support and mechanical load mitigation. Energies 14:4995. https://doi.org/10.3390/en14164995
Sourkounis C, Tourou P (2013) Grid code requirements for wind power integration in Europe. In: Conference papers in energy, pp 1–9. https://doi.org/10.1155/2013/437674
Wu Y-K, Chang S-M, Mandal P (2019) Grid-connected wind power plants: a survey on the integration requirements in modern grid codes. In: Proceedings of the 2019 IEEE/IAS 55th industrial and commercial power systems technical conference (ICPS). IEEE, Calgary, AB, Canada, pp 1–9. https://doi.org/10.1109/ICPS.2019.8733382
Denholm PL, Sun Y, Mai TT (2019) An introduction to grid services: concepts, technical requirements, and provision from wind. National Renewable Energy Laboratory, Golden, CO, NREL/TP-6A20-72578
Luo X, Wang J, Wojcik JD, Wang J, Li D, Draganescu M, Li Y, Miao S (2018) Review of voltage and frequency grid code specifications for electrical energy storage applications. Energies 11(5):1070. https://doi.org/10.3390/en11051070
Potgieter JHJ, Kamper MJ (2012) Design of new concept direct grid-connected slip-synchronous permanent-magnet wind generator. IEEE Trans Ind Appl 48(3):913–922. https://doi.org/10.1109/TIA.2012.2191251. Accessed 12 Aug 2021
Arbeiter M, Hopp M, Huhn M (2021) LVRT impact on tower loads, drivetrain torque and rotational speed—Measurement results of a 2 MW class DFIG wind turbine. Energies 14:3539. https://doi.org/10.3390/en14123539
Bian Y, Wyman-Pain H, Li F, Bhakar R, Mishra S, Padhy NP (2018) Demand side contributions for system inertia in the GB power system. IEEE Trans Power Syst 33(4):3521–3530. https://doi.org/10.1109/TPWRS.2017.2773531
Thiesen H, Jauch C (2020) Determining the load inertia contribution from different power consumer groups. Energies 13:1588. https://doi.org/10.3390/en13071588
Seneviratne C, Ozansoy C (2016) Frequency response due to a large generator loss with the increasing penetration of wind/PV generation-A literature review. Renew Sustain Energy Rev 57:659–668. https://doi.org/10.1016/j.rser.2015.12.051
Ørum E, Kuivaniemi M, Laasonen M, Bruseth AI, Jansson EA, Danell A, Elkington K, Modig N (2015) ENTSO-E Report—Future system inertia. https://www.statnett.no/globalassets/for-aktorer-i-kraftsystemet/utvikling-av-kraftsystemet/nordisk-frekvensstabilitet/future-system-inertia-phase-1.pdf. Accessed 31 Aug 2021
Jauch C, Sørensen P, Norheim I, Rasmussen C (2007) Simulation of the impact of wind power on the transient fault behavior of the nordic power system. Electr Power Syst Res 77(2):135–144. https://doi.org/10.1016/j.epsr.2006.02.006
De Rijcke S, Hamann N, Harjula A, Seppanen J, Kuusela A, Luukkonen I (2016) Damping power system oscillations by wind power plants. In: In: Conference on Proceedings of the 15th wind integration workshop, Vienna
Dominguez-Garcia JL, Gomis-Bellmunt O, Bianchi FD, Sumper A (2012) Power oscillation damping supported by wind power: a review. Renew Sustain Energy Rev 16(7):4994–5006. https://doi.org/10.1016/j.rser.2012.03.063
Jonkman J, Butterfield S, Musial W, Scott G (2009) Definition of a 5 MW reference wind turbine for offshore system development. National Renewable Energy Laboratory, Golden, Colorado, USA. https://www.nrel.gov/docs/fy09osti/38060.pdf. Accessed 01 Sep 2021
Jauch C (2020) First eigenmodes simulation model of a wind turbine—For control algorithm design. WETI Hochschule Flensburg. https://doi.org/10.13140/RG.2.2.17192.19204
Eriksson R, Modig N, Elkington K (2018) Synthetic inertia versus fast frequency response: a definition. IET Renew Power Gener 12(5):507–514. https://doi.org/10.1049/iet-rpg.2017.0370
EirGrid; Soni, All Island TSO facilitation of renewables studies. http://www.eirgridgroup.com/site-files/library/EirGrid/Facilitation-of-Renewables-Report.pdf. Accessed 01 Sep 2021
Roscoe AJ, Yu M, Dyśko A, Booth C, Ierna R, Zhu J, Urdal HA (2016) VSM (Virtual Synchronous Machine) convertor control model suitable for RMS studies for resolving system operator/owner challenges, In: Conference on proceedings of the 15th wind integration workshop, Vienna
Gloe A, Jauch C, Craciun B, Winkelmann J (2019) Continuous provision of synthetic inertia with wind turbines: implications for the wind turbine and for the grid. IET Renew Power Gener 13(5):668–675. https://doi.org/10.1049/iet-rpg.2018.5263
Gloe A, Jauch C (2021) Grid support with wind turbines: the case of the 2019 blackout in Flensburg. Energies 14:1697. https://doi.org/10.3390/en14061697
Gloe A, Jauch C, Craciun B, Zanter A, Winkelmann J (2021) Influence of continuous provision of synthetic inertia on the mechanical loads of a wind turbine. Energies 14:5185. https://doi.org/10.3390/en14165185
Hydro-Québec (2019) Technical requirements for the connection of generating stations to the hydro-Québec transmission system, Decision D-2018-145. http://www.hydroquebec.com/transenergie/fr/commerce/pdf/2_Requirements_generating_stations_D-2018-145_2018-11-15.pdf. Accessed 26 Jan 2021
ENTSO-E (2016) Frequency stability evaluation criteria for the synchronous zone of continental Europe—Requirements and impacting factors—RG-CE system protection & dynamics sub group. https://eepublicdownloads.entsoe.eu/clean-documents/SOC%20documents/RGCE_SPD_frequency_stability_criteria_v10.pdf. Accessed 06 Sep 2021
EirGrid, Grid Code, Version (2020). http://www.eirgridgroup.com/site-files/library/EirGrid/GridCodeVersion9.pdf. Accessed 06 Sep 2021
Jauch C, Cronin T, Sørensen P, Bak-Jensen BA (2007) Fuzzy logic pitch angle controller for power system stabilization. Wind Energy 10(1):19–30. https://doi.org/10.1002/we.205
Jauch C (2007) Transient and dynamic control of a variable speed wind turbine with synchronous generator. Wind Energy 10:247–269. https://doi.org/10.1002/we.220
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2023 The Author(s), under exclusive license to Springer Nature Switzerland AG
About this chapter

Cite this chapter
Jauch, C. (2023). Grid Integration of Wind Turbines. In: Schaffarczyk, A.P. (eds) Wind Power Technology. Green Energy and Technology. Springer, Cham. https://doi.org/10.1007/978-3-031-20332-9_10
Download citation
DOI: https://doi.org/10.1007/978-3-031-20332-9_10
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-031-20331-2
Online ISBN: 978-3-031-20332-9
eBook Packages: EnergyEnergy (R0)