
Abstract
The market of renewable energy sources is increasing day by day due to the global energy crisis and the environmental pollution factors affecting the globe. Out of the renewable sources, wind energy has shown a substantial increase in contributing for the production of electricity. Around 60 GW of wind power installed capacity was added in 2019 with a total global figure reaching 651 GW, worldwide. Wind energy conversion system (WECS), as the name suggests, taps the on-site wind mechanics to convert wind energy into mechanical power of rotation. Mechanical power of wind turbines is then converted into electrical energy through genera-tors. Present chapter deals with technological aspects of design and operation for grid-integrated WECSs. Basic principle underlying the working of a wind energy power system is outlined. Primary elements and components involved in construction of a generic wind energy power plant are introduced. Integrating intermittent renewable energy power plants like WECSs require power electronic converters which act as an interface between wind turbine generators and the main power grid. Electrical properties of wind generators dictate the performance of a grid-integrated WECS, and thus, the operational aspects of power quality, reliability and stability become underlying objectives for design of power electronic interfacing converters. Operational aspects in terms of active and reactive power management have been outlined. Issues of power fluctuations, flicker and harmonics with necessary concern to transmission line grid codes are analysed. Techno-economic feasibility analysis for linking the wind turbine generators to the grid reported in the literature have been discussed in detail.
Access provided by Autonomous University of Puebla. Download chapter PDF
Similar content being viewed by others
Keywords
- Modelling and simulation
- Power converters
- Power quality
- Techno-economic analysis
- Wind energy conversion systems
1 Introduction
Electricity generation sector majorly depends on oil and gas, and hence, the environmental impacts are expected to be dangerous. In order to control the harsh effects of environmental degradation, it is very necessary to switch onto a cleaner energy source. Harnessing electrical power from wind energy has gained interest in several nations around the world. 90 countries around the world has recognized wind energy system as an energy resource industry, and 30 countries have more than 1 GW of wind power installed capacity, out of which 9 nations have installed 10 GW of wind energy-based power systems (Karin et al. 2019). As of September 2019, total cumulative onshore and offshore wind energy installations have been reported with a capacity of 591 GW, worldwide [1]. Digitization and other associative technological advancements have led to unlocking more volume in wind energy business, through improved designs, enhanced asset and risk management with improved maintenance. Africa and the Middle East have installed close to 900 MW of wind energy capacity in 2019 as compared to 962 MW capacity in 2018 [2]. Studies have forecasted an increase of 160% more of the current installed capacity in these regions [2].
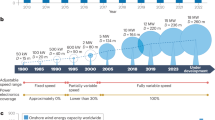
Countries which have dominated the wind power installations in 2018 are Brazil, China, Germany, India and the USA. China has been the leader with around 210 GW of wind power installed capacity [3] followed by the USA which achieved about 100 GW of wind power installed capacity [4]. Competitive pricing, technological advancements and low curtailment risks have supported speedy wind power installations in China. Renewable portfolio standards and production tax credit have been the major drivers to enhance the competitiveness of wind power industry in the USA (refer Fig. 1).

Newly added worldwide wind power installed capacity since 2015 [4]
Developing economies like India and China are experiencing a gap in supply and demand of energy and, thus, a restricted supply of electricity to the consumers [5]. Such a situation, if not addressed, can adversely affect the economic growth. Expected increase in energy demand, limited or nascent growth in supply, high cost of capacity addition and negative environmental impacts of fossil-fuel-based power generation highlight the utilization of renewable energy sources (RES), implementation of energy efficiency and energy conservation technologies and measures [6]; distributed energy sources and application of demand response or demand side management are other ways to bridge the gap of demand and supply during the peak period [7]. Wind power plants can be integrated with demand side management strategies to improve microgrid system’s performance and reduce cost of generation. Small-scale low power wind turbines are being installed in high rise buildings to generate electric power in locations with very good wind contour profiles.
1.1 Wind Energy Conversion System
A wind energy conversion system (WECS), as the name suggests, converts the kinetic energy available in the wind into rotational mechanical energy through turbine blades which in turn is converted into electrical power through a generator (and a gearbox). Windmills are also WECSs with an only difference that the rotational mechanical power of shaft is used for non-electrical purposes such as pumping water, milling and driving other machineries.
Wind turbines tap the energy in blowing winds using blades, and low-pressure pockets are formed on one side of the turbine blades. These pockets pull the turbine blade towards it, thereby enforcing the rotor of the wind turbine to rotate. Blowing wind also exerts a force against front side of the turbine blade. This force called as drag is much weaker than the lifting force which causes the rotor to turn. Lift and drag forces are combined, and the turbine rotates like a propeller. Mechanical gears used are employed to increase the rotation speed of the system in order to possess the capability to generate AC electrical power. The speed increases from around 15 rpm to 1,800 revolutions a minute.
A typical wind turbine consists of a streamlined casing called a nacelle, which is placed on top of a tower. Nacelle contains components such as gears, brake, rotor and generator, and for high-power wind farm, facilities are large enough for a helicopter to land. A controller is used to maintain speed of the turbine rotor below a certain value to avoid damage caused by high-speed winds. Hydraulic/mechanical/electrical brakes are used to interrupt the rotor rotation during emergency conditions. An anemometer is used to timely measure the wind speed, and the wind speed data is passed on to the controller.
Typical layout of a grid tied permanent magnet synchronous generator (PMSG)-based WECS is shown in Fig. 2. Firstly, the kinetic energy of wind is converted to mechanical energy through wind turbine, which acts as a prime mover for the PMSG system. PMSG, having hard magnets either mounted on the surface or buried inside the rotor structure, converts the mechanical energy into electrical energy. As the wind velocity varies over time, the mechanical power output of the wind turbine and the electrical power output of the PMSG also varies. Thus, variable voltage variable frequency supply is available at the stator terminals of PMSG. The Institute of Electrical and Electronics Engineers (IEEE) developed a standard IEEE-1547 [8], which deals with the standards pertaining to the grid integration of distributed energy resource; only active power can be injected by a distributed energy resource. Hence, for the grid integration of PMSG, the frequency and voltage level needs to be regulated [9].

Power structure of grid tied PMSG-based wind energy conversion system
Also, the flow of active and reactive power needs to be controlled. This is achieved with the help of two converters, Converter-I and Converter-II, connected in back-to-back configuration. The Converter-I is the machine side converter which ensures that the maximum power point tracking is employed and rotor speed is regulated. This is achieved by controlling the phase, frequency and amplitude of the currents being drawn from PMSG. This converter further ensures that sinusoidal currents drawn from the PMSG are sinusoidal, thereby minimizing the losses on account of harmonic currents. The Converter-II, which is controlled to act as a grid side converter, regulates the dc link voltage, v dc, and controls the active power being injected in the grid.
The phase, frequency and magnitude of currents being injected in the grid are controlled to control the active power injection at unity power factor. This necessitates that the injected currents are sinusoidal and no reactive power is delivered to the grid. This further results in minimal grid pollution on account of grid integration of wind energy conversion system [10]; a grid tied microgrid structure for an educational institute was proposed by [11].
Further, Fig. 3 shows the control structure employed for Converter-I. The speed and position sensor senses rotor position, θ g, and rotor speed, ω. Based on the instantaneous wind velocity, the maximum power point tracking (MPPT) controller determines the reference speed for PMSG which is the optimal speed to ensure that maximum power is extracted. The actual rotor speed and the reference speed are compared, and the resulting speed error is processed by the speed controller to determine the reference q-axis current. The sensed stator currents, i ga -i gb -i gc, undergo abc to dq0 transformation to determine the d-q axes currents, i dg -i qg, being supplied by the stator. Theses d-q currents are compared with the respective reference values, and the resulting current errors are individually processed by the current controllers to determine the reference d-q axes voltages, v dg * - v qg *. These d-q reference voltages undergo dq to abc transformation to determine the reference voltages vag*- vbg*- vcg*, which are further processed by the PWM modulator for the generation of gate pulses for the Converter-I.

Control structure for Converter-I
Moreover, Fig. 4 shows the control structure employed for Converter-II. The instantaneous grid voltages v sa -v sb -v sc are processed by phase lock loop (PLL) algorithm to determine the instantaneous phase angle, θ s. With the help of θ s, the current being injected into the grid are transformed from abc to dq0 reference frame. The dc-link voltage, v dc, measured across the capacitor C dc is compared with the reference value, and the resulting voltage error is processed by the dc-link voltage controller to determine the reference value of d-axis current, id*. As no reactive power is to be injected into the grid, reference value of q-axis current, iq*, is maintained at zero. The actual and the reference d-q axes currents are compared, and the resulting errors are processed separately by the d-axis and q-axis current controllers. Thus obtained reference voltages vd* and vq* are transformed to abc reference frame, vsa*-vsb*-vsc*, which are further processed by the PWM modulator to generate the gate pulses for the Converter-II. This chapter is primarily focused on a WECS that would generate electrical power.

Control structure for Converter-II
2 Design, Modelling and Simulation of a WECS
For maximum utilization of wind power dynamics and electrical power generation, angular velocity of the wind turbine plays a vital role. There are two types of wind turbines, viz. fixed-speed wind turbine and variable-speed wind turbine. Variable-speed wind turbine systems have the ability to supply reactive power on demand and address peak load through the drive train. Maximum power point tracking (MPPT) algorithms are developed to extract maximum power from a WECS by generating a reference voltage point for the converter. Ye et al. [12] developed a MPPT strategy by controlling the excitation current of a hybrid excitation synchronous machine-WECS. Generator voltage is converted into DC which is then fed to the utility through a voltage source inverter. The excitation current needed for the machine is provided by a buck circuit. Inverter current is maintained in phase, and the DC link voltage is managed using a PI controller. A LC filter and a PI controller are used for harmonics mitigation and generating a constant excitation current. d- and q-axis control loops are developed to control the converter outputs. Developed MPPT strategy compares previous and current power output and ensures that the difference is within a certain prescribed limit. If not, control action is taken. MPPT algorithm is demonstrated on a 3 kW DC motor for wind emulation with appropriate torque control.
Performance of a designed WECS is evaluated under different wind speeds and conditions [13]. A 1-kW PMSG-based WECS simulator was developed comprising a small turbine, servo motor, rectifier, MPPT-controlled boost converter, battery bank and a PWM DC-AC converter. PMSG has been considered for the study due to its larger power-to-weight ratio, reliability and efficiency. Boost converter raises the rectified voltage which is then supplied to the inverter. A pulse-width modulation (PWM) signal is provided by the PI-controller to drive the boost converter with an aim to maximize the output power using MPPT. Inverter provides an interface between the load and DC link voltage. PI-controller regulates the user-end voltage using control loops which handles the wind variations and power disturbances by controlling the current values. PSIM [14] software package was used to simulate the WECS. However, the study assumed ideal characteristics for switches and diodes of the inverter, and an additional DC/DC power converter was used for BESS. Wind speed was varied from 5 m/s to 11 m/s and was varied to be exponentially decreasing for testing dynamic performance of the developed WECS. Maximum errors of 0.3 pu and 0.15 pu were recorded for speed and torque, respectively.
Doubly fed induction generator (DFIG)-based WECS possess several advantages over PMSG-based WECSs. Reddy and Kumar [15] developed a DFIG-WECS with a variable speed, horizontal axis-type wind turbine. Power electronic interfacing converters are made use of to integrate a WECS to the main electrical power grid. Performance and control of a two level converter and a matrix converter were compared as an interface between the grid and the DFIG. A back-to-back voltage source converter (a two-level convertor) consisted of a rectifier and an inverter, connected through a dc link. AC/DC rectifier on the generator side controls the rotor speed, and DC/AC inverter on the grid side maintains the dc link voltage constant, irrespective of the magnitude of generator side voltage. The matrix converter is comprised of nine bidirectional switches acted as an AC/AC converter to control magnitude, frequency, phase angle and input displacement angle. Matrix converter was employed to act as a substitute for the dc link used in a typical two level converters. The control of these converters is provided by the space vector pulse width modulation (SVPWM) technique. During its operation, six switches out of eight are active switching space vectors and reference voltage is selected as per which the switching states of the inverter are decided. The performance of the two converters is simulated in MATLAB/SIMULINK. Firstly, the simulation is conducted on a two-level converter. The current and voltage waveforms are plotted, and the total harmonic distortion (THD) for the generated voltage and current was evaluated to be 1.06% and 2.27%, respectively. For load voltage and current, THD was 0.27% and 0.42%, respectively. Using SVPWM matrix converter, THD for generator voltage and current was reduced to 0.69% and 1.02%, respectively. Also, for load voltage and the current, THD lowered to 0.17% and 0.29%, respectively.
A variable speed WECS yields 10%–12% more output energy than a fixed speed WECS and is less expensive [16]. PMSG machines are regarded to be aptly suitable for a variable speed WECS due to high efficiency and reliability with less weight and size [17]. During transfer of electrical power into the grid or the load, various converters are used out of which the matrix converter is considered to be a better choice as it is free from commutation problems, light in weight, fast transient response and compact in size.
In addition, Kumar et al. [16] developed an adaptive fuzzy logic controller along with a reversed matrix converter to obtain MPPT point. Space vector pulse width modulation (SVPWM) was used to improve the performance under different conditions. A wind turbine emulator was used to drive the PMSG, and performance of the turbine was tested for steady and dynamic states. dSPACE DS1104 real-time board consisting of a chopper DC drive with four-quadrant control was used as emulator. Twelve-switch voltage boosted-matrix converter (six on the front as voltage source rectifier and other six on the rare end as current source inverter (CSI)) was used. At any particular instant, one switch from the upper end and one from the lower end conducts. When the switches are from different phases, power is transferred to the load and vice versa. The adaptive fuzzy logic controller is comprised of a voltage regulator and an angular frequency controller. Using the perturb and observe method, the reference angular frequency was calculated, and output power was monitored as per the change in the frequency. Matrix converter generated maximum power by regulating active power through a signal obtained from the SVPWM. The adaptive fuzzy logic controller generated the SVPWM phase angle by processing an error function. In this manner, by constantly using the reference angular frequency, maximum power from the wind is captured.
System responses for both steady state and during unbalanced load conditions were observed. THD value for steady-state response was 2.3%, and power factor of 0.996 was achieved. Whereas, for unbalanced load conditions, load voltages were quite stable, the matrix converter was completely capable of handling voltage and frequency during balanced, unbalanced and one phase-out conditions.
DFIG-based WECS with active power management strategy was developed by Tamaarat and Benakcha [18]. Vector method was adopted to manage the active and reactive power, independently. A three-blade wind turbine and a DFIG with stator windings directly connected were modelled with a power converter connected to the rotor windings of the DFIG. Grid side converter handled the reactive power flow between the converter and the grid, whereas the rotor side converter focused on extracting maximum power out of the system. Active and reactive powers were stated as per rotor currents of DFIG. Direct control method was used to compare the reference and actual values of active power and reactive power. In vector control, the quadratic component is responsible for active power and direct component for reactive power. Wind speed is varied from 6 m/s to 8.5 m/s, and waveforms for wind gust, power coefficient, angular speed, active power and reactive power were observed. Variations in current and voltage with respect to rotor speed were observed. External disturbances like wind speed, density and frequency variations are provided in order to check the robustness. Developed scheme was not completely robust against wind speed variations and did not provide adequate performance for dynamic characteristics, but it is better to estimate the speed instead of measuring as anyways the measurements are not that accurate.
Small-scale low-power WECSs have also been designed to act as micro-generation source for home energy management system. Kusakana [19] developed an energy management model of a 2 kW residential WECS with battery storage. Battery energy storage has been used to solve the problem of intermittency in power output of a typical WECS [20, 21]. Local load profile and wind resource along with feed-in tariff (FiT) and time of use (ToU) were regarded as inputs to the developed energy management model. MPPT operation was achieved using DC/DC converter. An inverter was used to connect the WECS to the main power grid. Total power generated was supplied to the MPPT converter to extract maximum power. If the WECS generated power greater than the required quantity, it was split and fed into the DC/DC converter and the battery for charging. Other times of the day, power was imported from the grid to satisfy the load demand. Developed non-linear model was evaluated using a WECS system that interacted with the grid, in South Africa, as a case study. For the case study, the simulation results displayed that cost reduction was achievable up to 95%.
3 Control Design for a WECS
In a WECS, it is necessary to control action of the wind turbine, and control strategies need to be developed to obtain maximum output. Power output from a WECS is dependent on the accuracy with which peak power points of the system are tracked. This tracking is exercised by developing a maximum power point tracking (MPPT) algorithm which operates irrespective of the type of generator being used. MPPT controllers are designed for parameter control of tip-speed ratio (TSR), hill-climb search and power signal feedback method. Numerous studies have been reported in developing MPPT algorithm strategies by varying parameters of the WECS system components.
Mathematical model for connecting a small-scale wind energy generator to the grid through transformers and transmission lines is shown in Fig. 5. As illustrated from the outline of power structure of grid tied PMSG-based WECS (Fig. 2), any grid tied inverter is a voltage source inverter (VSI) operated in current controlled model. This inverter acts as a controlled current source and, hence, is represented as a current source in the equivalent circuit diagram of Fig. 5.

Mathematical model of a WECS connected to the grid
In Fig. 5, I inj represents the injected current which is the output of the VSI (output of Fig. 2). \( {L}_{MV_T} \), \( {L}_{HV_T} \) and \( {L}_{UHV_T} \) represent medium voltage, high voltage and ultra-high voltage transformer, respectively, and \( {R}_{MV_l} \), \( {L}_{MV_l} \) and \( {C}_{MV_l} \) are the medium-voltage transmission line resistance, inductance and shunt capacitance, respectively. Similarly, \( {R}_{HV_l} \), \( {L}_{HV_l} \) and \( {C}_{HV_l} \) are the high-voltage transmission line resistance, inductance and shunt capacitance, respectively. V G is the grid voltage level. It is to be noted that the model represented by Fig. 5 is based on a typical layout for connecting a small wind park structure to the grid [22] using passive components such as transformers and transmission line cables.
Boubzizi et al. [23] analysed PI, first- and second-order sliding mode control of the aerodynamic torque to achieve maximum efficiency through optimal performance of the wind turbine. Second-order sliding mode control (super twisting strategy (STW)) leads to better performance with elimination of undesirable chattering. d-axis dealt with reactive power and q-axis with torque estimation. In PI controller, field-oriented approach was used where d-q axis is decoupled and parameters of the controller are computed using pole compensation approach, whereas for first-order sliding mode control, equivalent and switching control signals are used as sliding surfaces. Due to the presence of a sign term in the switching control signal, chattering phenomena takes place. This problem was eliminated in the second-order sliding mode control. This control strategy required information only on the sliding surface, reducing complexity and mitigating chattering effect as the control action now acts on a larger number of derivatives. MATLAB was used to implement the developed strategies, and robustness of the system was compared by varying the rotor resistance and mutual inductance. Wind speed was varied from 8 m/s to 13 m/s. Simulation results showed that the tracking performance of the second-order sliding mode control ensured better torque and rotor current than PI and first-order sliding model control. PI controller produced dynamic errors as well as overshoots which were absent in sliding mode control strategies.
Cheikh et al. [24] developed a control strategy to achieve maximum power output from a 3 kW PMSG-based WECS. Speed of PMSG was tuned to an optimum desired value by varying the chopper’s equivalent load resistance. Stochastic nature of wind was mapped as a combination of rapidly variable component (to model turbulence) and a long-term changing component (to model seasonal variations). d-q reference frame-based equivalent circuit was used to illustrate dynamics of PMSG, and a non-linear state space model was developed. In order to linearize the PMSG equivalent circuit model, a differential geometric feedback technique was adopted. Lie derivative of the output state-space equation was computed along the direction of system vector and input vector field. However, due to the dependency of the feedback controller on the parameters of the system, such as the high-speed shaft inertia, it was strongly affected by any uncertainty of the parameter. Error vectors of modelled PMSG speed and optimal speed based on tip-speed ratio (TSR) were computed and minimized using Lyapunov theory to handle uncertainties. Output electrical power and the electromagnetic torque of the developed WECS were driven close to optimal operating points by changing the value of the resistance. Such an exercise was obtained for different wind speed and TSR values. Developed control strategy was validated against first-order sliding mode controller by maintaining the coefficient of power to its maximum value and TSR value to optimally obtained value. Chopper equivalent resistance value was varied to obtain the optimum TSR and PSMG speed and, hence, maximum power output from the developed WECS. Transient disturbances were observed for rapid variations in coefficient of power, TSR and PMSG’s speed values.
Youssef et al. [25] developed a variable-step perturb and observe MPPT algorithm, for a grid-tied 1.5 MW WECS, which involved search space in a synthesized power speed curve. Synthesized curve was bifurcated into different regions, and the step-size was varied according to the position of operating point in the regions. PMSG was connected to the utility grid with the help of a back-to-back voltage source converter (VSC). Similar shape was maintained with changes in wind velocity while changing in location. Speed control concept was illustrated using a PMSG dynamic model. For eliminating reluctance torque, the d-axis current was forced to zero. Inverse park transformation was used to regulate actual machine current with reference. Low oscillations were seen upon applying small fixed speed step-size. MPPT time response improved upon large fixed speed step-size application. A new formulated curve divided the operation region into four sectors. Sign of difference between curves determined the perturbation. WECS was connected to the grid using an inverter (grid-tied). MATLAB/Simulink was used for demonstrating the developed MPPT algorithm and was validated for system performance with conventional perturb and observe MPPT algorithm.
In a standalone WECS, wind turbine is connected to the generator feeding an isolated load. Control of system voltage and frequency is an extremely important task in order to obtain optimal power generation and delivery. Model predictive control (MPC), as a technique, has been employed for control of WECSs with a limitation of requiring larger computational efforts. Electrical drives help the MPC to function as a fast system with shorter time steps, thereby improving the strategy’s computational performance in term of speed, accuracy and memory requirements. Kassem [26] developed a MPC strategy to manage and control WECS parameters. VAR compensators, connected to the induction generator terminal, were employed to regulate the system voltage by controlling the firing angle. For controlling the system frequency, rotor speed has to be controlled which eventually depends on the power output and blade angle. A functional MPC was designed which uses Laguerre functions to minimize the computational steps. For a larger prediction range, exponential data weighing is used to manage the numerical problems. The system was simulated on MATLAB/SIMULINK in order to test the effectiveness of MPC strategy. Wind speed was varied from 6 m/s to 8 m/s and was tested for a step change of load impedance. As the wind velocity increases, firing angle of the compensator decreases with increase in rotor speed.
A robust non-linear adaptive controller was designed by Ayadi and Derbel [27] for controlling the power output of a PMSG-based variable speed wind turbine (VSWT). The controller was designed on the backdrop of a back-stepping strategy as compared to conventional vector approach, feedback linearization control and sliding mode control. Lyapunov function was used for derivation of fundamentals and stability analysis of the developed controller. A mathematical model of wind turbine was developed through which optimum rotor speed and maximum power output were obtained by considering optimal values of blade pitch angle and tip speed ratio for MPPT. Field-oriented control strategy is majorly used for PMSG-based WECSs. Such a strategy consists of two inner current loops and an external mechanical loop to control torque and speed regulation. Both non-adaptive- and adaptive-based cases were considered where the system parameters were varied in the adaptive case, only. An additional step for adaptive part is taken into account in which a new Lyapunov function is introduced for parameter adaption. Comparatively, adaptive case gave better accuracy for PMSG, and the system efficiency was improved.
Kahla et al. [28] have used fuzzy logic to develop a MPPT strategy along with the standard on-off controls in order to mitigate drawbacks of the standard methods which are presence of discontinuous sign function leading to chattering effect and poor system robustness. Using fuzzy logic enhanced the capabilities of a conventional on-off control by eliminating chattering effect. Fuzzy controller generates reference torque, and the hysteresis controller generates PWM pulses by comparing the three-phase currents to minimize any discrepancy. Conventional on-off control has two components: equivalent control component and alternate high-frequency component. Fuzzy logic controller adds an alternate high-frequency component to make the control component of WECS to work at optimal operating point and eliminates the unwanted sign value resulting in no chattering.
Sensors employed for data acquisition and signal processing can cause errors. Approach against erroneous sensor measurements for resilient operation of PMSG-based direct-drive WECSs was presented by Saha et al. [29]. A sliding mode observer (SMO)-based state and fault estimation system, indirect vector control approaches and a fault mitigation algorithm for generator and grid side voltage source converters (VSCs) were designed. Vector control approach is simple, however, PMSG-based WECS failed to operate reliably and efficiently due to erroneous sensor measurements. Current, DC link voltage and speed sensors’ malfunctioning were considered. State and fault estimation system based on SMO and mitigation of fault along with indirect vector control algorithms regulated the electrical torque to maintain optimum generator speed for maximum power extraction. Grid-side VSC was controlled for power flow regulation when operated in the grid-connected mode and for voltage and frequency regulation when operated in the islanded mode. Function of SMO was error estimation in the generator due to faulty sensor measurements. Uncertainties in modelling and parameters were not considered. Simulation studies were performed on a grid-connected PMSG-based WECS. Proposed approach was found to be sufficiently good to nullify the impact of faulty sensors’ erroneous measurements.
For a dual stator induction generator (DSIG)-based WECS, Benakcha et al. [30] developed comparative analysis of linear and non-linear control based on PI control and back-stepping control, respectively. Wind turbine is modelled, and the relationship between tip speed ratio, wind speed, power coefficient and power was developed. DSIG comprises two static stator windings which are displaced at an angle of 30° and a moving rotor winding. Field-oriented control was performed by controlling the d-q axis currents which eventually controls the flux and torque. For back-stepping control of DSIG, Lyapunov function was used for defining error between reference and actual speed and also the reference rotor flux and actual one. The DSIG rated at 1.5 MW is simulated on MATLAB/SIMULINK choosing the displacement between the windings as 30°. Firstly, by taking three fixed speeds, the PI controller and the back-stepping controller are compared. Back-stepping control had faster response, while the response time was improved for both PI and back-step cases with increase in the wind speed. Secondly, the wind varied speed profile is considered which results in constant dc voltage, active and reactive powers in acceptable limits and lower value of THD for PI control method.
4 Power Quality for Grid-Tied WECS
Traditionally, power quality is defined as any change in the power (voltage, current, or frequency) that interferes with normal operation of electrical equipment [31]. Every equipment and machinery that is driven by electrical power has a certain limit of susceptibility which in turn defines the necessary level of power quality. It can be noticed from the definition that power quality can be specifically regarded as a power quality disturbance. IEEE developed a standard named IEEE Recommended Practice for Monitoring Electrical Power Quality IEEE 1159–1995 which defines power quality in terms of interruptions, sags and swells, long duration variations, impulsive transients, oscillatory transients, harmonic distortion, voltage fluctuations and noise [32].
Variations in wind speed lead to fluctuations in the output power of a WECS which is given as Eq. (1).
where, P wind = wind power output, W; P = density of air, kg/m3; A = area of the rotor, m2; v = wind velocity; and m/s, c p = Betz-factor power coefficient, usually in the range of 0.4–0.5.
Variations in wind speed cause the parameter v to change, and thus, output power of the WECS changes significantly (as P wind is proportional to v 3). Now, when power changes with velocity, injected current, Iinj, becomes variable which causes the grid voltage to drop leading to flicker effect due to grid impedance variations. A current, I, flows into the grid when an impedance Z is connected to the WECS (of Fig. 5), which is given as Eqs. (2) and (3).
Changes in power, P, result in corresponding change in current of Eq. (3).
Such variations in current lead to flicker effect and harmonics which are also dependent on the type of generator used and grid-coupling in Fig. 2. Also, due to non-linearity of loads, harmonics are generated. Harmonics are undesired non-sinusoidal signals which can be represented using Fourier transforms as a combination of sine and cosine mathematical functions. Harmonics are represented mathematically in terms of total harmonic distortion (THD), amplitude and partial weighted harmonic distortion (PWHD) of voltage and current signals. Figure 6 illustrates representation of fundamental (desired) signal and harmonics (third, fifth and seventh harmonic) with respect to their phase, degrees.

Mathematical model of a WECS connected to the grid
Due to the intermittent nature of wind energy, power electronic interfacing circuits are employed to connect the wind power generator to the grid. Incubation of power electronics and, specifically, electronics has raised the issue of grid-tied WECSs [33]. Several articles have been reported on development of control strategies like PWM rectifier controlled by direct power control-space vector modulation (DPC-SVM) to eliminate harmonic currents [34]. Due to non-linear nature of the loads, an electric power system suffers from harmonics-related issues. Passive filters due to series or parallel resonance and no complete elimination of harmonic currents find limited applications as compared to active filters for harmonics mitigation [35].
A hybrid control strategy was developed by Mesbahi et al. [34] for grid side converter to control the dc link voltage with active filtering function. A doubly fed induction generator (DFIG)-based WECS was developed using the d-q reference frame (Fig. 7). Wind-generated active and reactive powers were controlled using rotor currents by a PI controller. Instantaneous active and reactive powers of the load were controlled though DPC strategy which involved comparison of estimated power values with new reference powers and variables using a hysteresis controller. Voltage vectors were obtained using these differences and looked up in the switching table. MATLAB/Simulink was used to model the strategy, assuming a constant speed DFIG system.

Orientation of the d, q frame
In a wind energy conversion system (WECS), the main aim is to deliver constant voltage and power to the load connected to it. In order to maintain the voltage constant, rotor flux-oriented method is mostly used in the systems. Idjdarene et al. [36] developed a direct torque control method to control the DC voltage of an isolated induction generator integrated with a flywheel energy storage system. The flywheel storage was responsible for power quality control in case of variations in wind speeds. Developed WECS consisted of a wind turbine, rectifier, inverter, induction generator and a flywheel storage. As speed of the wind fluctuates, power output experiences oscillations and to control speed, a reference speed was obtained. Vector model of the induction machine was used to develop the control strategy. Torque was estimated from flux and current values using the d-q model of the induction machine. Three-phase voltage inverter provided voltage vector, and the switching table was preferred for operation in the four quadrants. Flywheel energy storage system was modelled using the flywheel initial energy and reference speed expressions. The machine was operated beyond its rated speed, and a field weakening operation was required for constant power function.
5 Power System Dynamics and Contingency Analysis for a Grid-Connected WECS
Producing electricity using wind energy is nowadays used widely throughout the world and is considered as the most clean and efficient form of renewable energy. In a grid-connected WECS, there is a significant chance of fault occurrence in the transmission system. With increased penetration of large wind farms for power generation, power system engineers are developing fault diagnosis studies applying various algorithms to estimate the state of the power system. Also, for such forms of energy, it is equally important to test whether it is reliable and if yes till what extent. Such an exercise enhances the power system security levels. An electric power system operates in five different states ,viz. normal/secure state, alert state, emergency state, extremis state and restorative state (Fig. 8). A power system is said to be secured when all the components are operating within acceptable limits and all the system variables are within prescribed ranges [37, 38].

Power system operating states
Aval et al. [39] developed an analytical approach to develop a reliability assessment tool which would also evaluate risks associated with a DFIG-based WECS. Contingencies in terms of wind speed and wind turbine outages were considered, and a Weibull-Markov method was adopted and tested to a Vestas V90-2 MW wind turbine structure. The homogenous Markov method is used for frequency evaluation and state probability using analytical matrix operations. Developed approach was applied to a six-bus test system with nine transmission lines and generators ranging from 5 MW up to 40 MW. The analytical approach was demonstrated as different case studies scaling up and down the generators connected to the bus 1 and 2. Outputs were recorded in terms of forced outage rate, mean time between failures per hour, mean time to repair per hour and maintenance per week required. Twenty wind power generators of 2 MW each were considered with failure rates for different components of the WECS under study.
Fault detection and diagnosis of a grid-connected WECS is also significant. A robust power system state observer was developed by Wu et al. [40] for FDD and, also, to provide stability in case of external disturbances. For the adaptive fault diagnosis, a detection system was designed based on the power system state vectors. Lyapunov stability theory was applied to test the feedback gain matrix and stability checks whereas for fault estimation, asymptotical stability was checked for accuracy. Closed loop stability of the system under study was tested for active tolerant control to ensure surety of normal operation of the faulted power system. Proposed system was simulated for a variable-speed and fixed-paddle WECS connected to a transmission system and was tested for two fault conditions: actuator fault and shaft fault. No experimental analysis or case studies were considered in the study.
A typical WECS comprises huge number of components, sensors and actuators which makes the system more complex and difficult to handle. Faults occurring in the sensors affect the operation of the turbines which eventually lowers the productive generation. To address such faults, Wang et al. [41] have developed a sensor-based process monitoring fault-tolerant control strategy to handle the faults and improve overall system performance. A linear time invariant system model was developed with an aim to identify the left co-prime factorization which shall lead to accurate estimation of the process outputs. Developed algorithm designs the process predictor, performs residual evaluation and handles the threshold setting of the system. Further, there are two proposed strategies for FTC. Supplementary sensor-based PM FTC replaces the measurements of the faulty sensor with the supplementary sensor once the fault is detected. The transfer function model of the secondary sensor is shown in the paper. But, to use extra sensors instead of the faulty sensors cannot always be the choice due to economic and structural considerations. For such cases, soft sensors based on the data-driven process monitoring have been used. It works by producing another process variable once the fault is detected. To check the performance of the proposed strategies, a benchmark simulator provided by MATLAB was used. Hydraulic pitch system is considered in this article for which input is the pitch angle control command and the measured pitch angle acts as the output. From the figures obtained, it could be noted that the monitoring technique proposed is quite reliable and also successful in detecting the faults. The results obtained for the FTC plotted for two cases shows that the supplementary sensor-based technique is the best. Also, the use of soft sensors gives a satisfactory result.
As the wind energy penetration increases, the power system’s (grid) frequency gets affected. Wind generators participate in the control of frequency control through advancements in technology. Verma and Kumar [42] developed a load frequency control strategy for a two area interconnected power system based on DFIG. A deviation signal is generated by comparing the system and load frequency, and the DFIG would inject power into the grid to provide necessary inertial support to the system. Developed control strategy is based on inertial control, power reserve control and communication control. DFIGs provide only primary control for frequency, but majority of control is provided by the conventional power plants. Using power electronic converters, kinetic energy stored inside the variable speed wind turbine (VSWT) is used for inertial control, pitch control and speed control. During inertial control, either the inertial response of VSWT is used, or droop characteristics are taken into consideration. In pitch control, active power is limited to a pre-defined value, and reserves are used when the system frequency changes. VSWT blades are turned as per the wind speeds for less or more exposure of the surface as per the power system’s requirement. A two area interconnected system model having both the reheat type conventional generators and non-conventional generators like DFIG are simulated. A load perturbation of 2% is given to observe the characteristics of the DFIG and the conventional generators.
You et al. [43] have studied the control problem for non-linear systems’ actuators. The problem was robust and fault-tolerant, while parameters were uncertain. For describing the WECS, the fuzzy model by Takagi-Sugeno [44] was used. Algorithms based on fuzzy dedicated observer and fuzzy PI observer were developed to analyse the system’s state along with the fault reconstruction of actuator. Stability of fuzzy robust scheduling fault-tolerant controller for the system was proved using various mathematical techniques such as Taylor series and linear matrix inequalities. Fault in the WECS was categorized into three types as per Pozo and Vidal [45] and Pérez et al. [46]. Takagi-Sugeno fuzzy model used if-then fuzzy inference rules for non-linear system description taking into account the unmeasurable state variables and system uncertainties. Parallel distribution compensation method was used to design the fault-tolerant controller. Boundary conditions for closed loop stability were proven by Lyapunov theory [47] and Taylor series [48]. The system state model was assumed to be observable. The captured mechanical power was depicted as per Betz theory [49].
6 Techno-economic Analysis of Wind Energy Conversion Systems
Apart from possessing technical and environmental advantages, a typical wind energy conversion system should also possess economic and financial feasibility for better adoption and easy implementation. Quantitative metrics, such as economic cost per kWh of power generation, annual energy generation, capital costs including costs of components, generator cost, tower cost, battery and inverter cost, installation and other costs, are evaluated to compute the net present value (NPV) and levelized cost of electricity (LCOE) generation. Financial analysis includes metrics which are computed as certain percentages over the capital costs. Such metrics include depreciation cost, interest less inflation cost, operation and maintenance cost and likewise [7].
Quantitative metrics such as annual energy output, wind power density per unit area, capacity factor and plant load factor are evaluated to assess the technical performance of a WECS. Historical wind and meteorological data are used to estimate and model the wind characteristics, and LCOE is evaluated. Ohunakin et al. [50] evaluated LCOE and NPV for various geographical locations in Nigeria. WECS’s plant life, maintenance costs, construction and infrastructure cost, wind speed, turbine life and discount rate were taken into consideration for evaluations. Wind turbines of ratings ranging from 20 kW to 2 MW were considered with different hub heights. As the value of life of wind turbine and capacity factor increases, LCOE decreases, and similarly when the operation, maintenance, infrastructure and turbine costs increases, LCOE also increases.
Taner [51] applied escalation method of inflation to economically analyse the optimal investment cost for developing a 3 MW WECS in the Cappadocia region of Turkey. The method estimated annual generation of around 7,884 MWh for the period of 2014–16. WECS energy region was based on the compatible wind potential as well as important performance characteristics installation, as described by Mathew and Philip [52]. The problem of plant area impact on farms was solved by its location on barren land with sufficient wind flow [53]. Owing to the environmental impacts on plant and animal life, it was analysed that the location of wind farms should be away from residential areas. In order to offer energy advice to the factory, data analysis calculation was considered important. The electrical energy unit cost was understood to be suitable for the Cappadocia region which served as the prime cause for its wind energy potential’s effectiveness. Statistical SPSS® software [54] was used to evaluate data accuracy rendered by Republic of Turkey Ministry of Forestry and Water Affairs General Directorate of Meteorology for the period of June 2012 to April 2015. Analysis of variance (ANOVA) was used to determine the wind velocity mean differences. Difference between the present cost of deferred plan and present value of current plan was defined as the cost for economic analysis.
7 Summary
Since last decade, there has been tremendous increase in installations of offshore and onshore wind energy conversion systems (WECS) due to several reasons such as green energy generation of high power, good wind potential and ability to harness offshore wind and also as a micro-generator. In this chapter, concept of generating electrical power using wind speed is introduced. Configuration and layout of the components involved in a typical WECS has been illustrated. Latest research articles on modelling and simulating a WECS was presented. For a grid-connected WECS, it is mandatory to control the active and reactive power components to satisfy the demand and also the electrical grid codes. Researchers around the world have deployed control strategies based on conventional control such as on-off, PI-control and also advanced strategies like sliding mode control, model predictive control and fuzzy logic. Due to the intermittent nature of wind energy, power electronic interfacing circuits are employed to connect the wind power generator to the grid. Incubation of power electronics and, specifically, electronics has raised the issue of grid-tied WECSs. Several articles have been reported on development of control strategies like PWM rectifier controlled by direct power control-space vector modulation (DPC-SVM) to eliminate harmonic currents. Fault analysis, detection and control for a grid-connected WECS have also been discussed.
References
IRENA (2019) Future of wind: deployment, investment, technology, grid integration and socio-economic aspects (a global energy transformation paper), International Renewable Energy Agency, Abu Dhabi. https://irena.org/-/media/Files/IRENA/Agency/Publication/2019/Oct/IRENA_Future_of_wind_2019.pdf. Accessed 18 Apr 2020
GWEC (2019) Global wind report 2018. Global Wind Energy Council, Belgium. https://gwec.net/wp-content/uploads/2019/04/GWEC-Global-Wind-Report-2018.pdf. Accessed 2 Feb 2020
CEP (2020) 2019 electricity & other energy statistics. Chinaenergyportal.org. https://chinaenergyportal.org/en/2020-q1-electricity-other-energy-statistics/. Accessed 18 Mar 2020
AWEA (2019) US wind industry quarterly market report. Third Quarter 2019, American Wind Energy Association, United States. https://www.awea.org/resources/publications-and-reports/market-reports/2019-u-s-wind-industry-market-reports. Accessed 10 Mar 2020
Harish VSKV, Anwer N, Kumar A (2019) Development of a peer to peer electricity exchange model in micro grids for rural electrification. In: 2019 2nd international conference on power energy, environment and intelligent control (PEEIC). IEEE, pp 259–263
Malik S, Harish VSKV (2019) Integration of automated demand response and energy efficiency to enable a smart grid infrastructure. In: 2019 2nd international conference on power energy, environment and intelligent control (PEEIC). IEEE, pp 371–377
Harish VSKV, Kumar A (2014) Demand side management in India: action plan, policies and regulations. Renew Sust Energ Rev 33:613–624
Zong XJ, Gray PA, Lehn PW (2015) New metric recommended for IEEE standard 1547 to limit harmonics injected into distorted grids. IEEE Trans Power Deliv 31(3):963–972
Joshi NR, Sant AV (2020) Analysis of a new Symmetic multilevel inverter topology with reduced component count. In: 2020 international conference on emerging trends in information technology and engineering (ic-ETITE). IEEE, pp 1–6
Karelia N, Sant AV, Pandya V (2019) Comparison of UPQC topologies for power quality enhancement in grid integrated renewable energy sources. In: 2019 IEEE 16th India council international conference (INDICON). IEEE, pp 1–4
Patel P, Sant A, Patel B (2019) Design of grid tied microgrid for Pandit Deendayal Petroleum University. In: ICTEA: international conference on thermal engineering, vol 2019
Ye BY, Ruan Y, Yang Y, Zhao MH, Tang YY (2011) Direct driven wind energy conversion system based on hybrid excitation synchronous machine. J Shanghai Univ (English Edition) 15(6):562–567
Sayed K, Abdel-Salam M (2017) Dynamic performance of wind turbine conversion system using PMSG-based wind simulator. Electr Eng 99(1):431–439
Powersim Inc (2020) PSIM modules. Powersim. https://powersimtech.com/. Accessed 10 Mar 2020
Reddy GPR, Kumar MV (2017) Two level versus matrix converters performance in wind energy conversion systems employing DFIG. J Inst Eng India Ser B 98(5):503–515
Kumar V, Joshi RR, Yadav DK, Garg RK (2017) Novel control for voltage boosted matrix converter based wind energy conversion system with practicality. J Inst Eng India Ser B 98(2):231–237
Shah R, Botta R, Sant A (2018) PMSG based single active bridge interfaced grid tied off-shore wind energy conversion system. In: 2018 fourth international conference on advances in electrical, electronics, information, communication and bio-informatics (AEEICB). IEEE, pp 1–6
Tamaarat A, Benakcha A (2014) Performance of PI controller for control of active and reactive power in DFIG operating in a grid-connected variable speed wind energy conversion system. Front Energy 8(3):371–378
Kusakana K (2019) Optimal energy management of a residential grid-interactive wind energy conversion system with battery storage. Energy Procedia 158:6195–6200
Koko SP, Kusakana K, Vermaak HJ (2015) Micro-hydrokinetic river system modelling and analysis as compared to wind system for remote rural electrification. Electr Power Syst Res 126:38–44
Kusakana K (2017) Energy management of a grid-connected hydrokinetic system under time of use tariff. Renew Energy 101:1325–1333
Schulz D (2008) Grid integration of wind energy systems. In: power electronics in smart electrical energy networks. Springer, London, pp 327–374
Boubzizi S, Abid H, Chaabane M (2018) Comparative study of three types of controllers for DFIG in wind energy conversion system. Protect Control Mod Power Syst 3(1):21
Cheikh R, Menacer A, Chrifi-Alaoui L, Drid S (2018) Robust nonlinear control via feedback linearization and Lyapunov theory for permanent magnet synchronous generator-based wind energy conversion system. Front Energy:1–12
Youssef AR, Ali AI, Saeed MS, Mohamed EE (2019) Advanced multi-sector P&O maximum power point tracking technique for wind energy conversion system. Int J Electr Power Energy Syst 107:89–97
Kassem AM (2012) Modeling and control design of a stand-alone wind energy conversion system based on functional model predictive control. Energy Syst 3(3):303–323
Ayadi M, Derbel N (2017) Nonlinear adaptive backstepping control for variable-speed wind energy conversion system-based permanent magnet synchronous generator. Int J Adv Manuf Technol 92(1–4):39–46
Kahla S, Sedraoui M, Bechouat M, Soufi Y (2018) Robust fuzzy on–off synthesis controller for maximum power point tracking of wind energy conversion. Trans Electr Electron Mater 19(2):146–156
Saha S, Haque ME, Tan CP, Mahmud MA (2019) Sensor fault resilient operation of permanent magnet synchronous generator based wind energy conversion system. IEEE Trans Ind Appl 55(4):4298–4308
Benakcha M, Benalia L, Ammar A, Bourek A (2019) Wind energy conversion system based on dual stator induction generator controlled by nonlinear backstepping and pi controllers. Int J Syst Assur Eng Manag 10(4):499–509
Dougherty JG, Stebbins WL (1997) Power quality: a utility and industry perspective. In: 1997 IEEE annual textile, fiber and film industry technical conference. https://doi.org/10.1109/texcon.1997.598528
IEEE (1995) IEEE recommended practice for monitoring electric power quality. IEEE Std. 1 159-1995
Bhalja HS, Sant AV, Markana A, Bhalja BR (2019) Microgrid with five-level diode clamped inverter based hybrid generation system. In: 2019 IEEE international conference on electrical, computer and communication technologies (ICECCT). IEEE, pp 1–7
Mesbahi T, Ouari A, Ghennam T, Berkouk EM, Mesbahi N (2016) A hybrid wind energy conversion system/active filter for non linear conditions. Int J Syst Assur Eng Manag 7(1):1–8
Sant AV, Gohil MH (2019) ANN based fundamental current extraction scheme for single phase shunt active filtering. In: 2019 IEEE international conference on electrical, computer and communication technologies (ICECCT), pp 1–6
Idjdarene K, Rekioua D, Rekioua T, Tounzi A (2011) Wind energy conversion system associated to a flywheel energy storage system. Analog Integr Circ Sig Process 69(1):67–73
Fink LH, Carlsen K (1978) Operating under stress and strain, electrical power systems control under emergency conditions. IEEE Spectr 15(3):48–53
Liacco TED (1967) The adaptive reliability control system. IEEE Trans Power Apparatus Syst 5:517–531
Aval SMM, Ahadi A, Hayati H (2016) A novel method for reliability and risk evaluation of wind energy conversion systems considering wind speed correlation. Fron Energy 10(1):46–56
Wu ZQ, Yang Y, Xu CH (2015) Adaptive fault diagnosis and active tolerant control for wind energy conversion system. Int J Control Autom Syst 13(1):120–125
Wang K, Luo H, Krueger M, Ding SX, Yang X, Jedsada S (2015) Data-driven process monitoring and fault tolerant control in wind energy conversion system with hydraulic pitch system. J Shanghai Jiaotong Univ (Science) 20(4):489–494
Verma YP, Kumar A (2012) Dynamic contribution of variable-speed wind energy conversion system in system frequency regulation. Front Energy 6(2):184–192
You G, Xu T, Su H, Hou X, Li J (2019) Fault-tolerant control for actuator faults of wind energy conversion system. Energies 12(12):2350
Li S, Wang H, Aitouche A (2018) Active fault tolerant control of wind turbine systems based on DFIG with actuator fault and disturbance using Takagi–Sugeno fuzzy model. J Frankl Inst Eng Appl Math 355:8194–8212
Pozo F, Vidal Y (2016) Wind turbine fault detection through principal component analysis and statistical hypothesis testing. Energies 9(1):3
Pérez JMP, Márquez FPG, Tobias A, Papaelias M (2013) Wind turbine reliability analysis. Renew Sust Energ Rev 23:463–472
Yedavalli RK (1993) Robust root clustering for linear uncertain systems using generalized Lyapunov theory. Automatica 29(1):237–240
Foy WH (1976) Position-location solutions by Taylor-series estimation. IEEE Trans Aerosp Electron Syst 2:187–194
Ragheb M, Ragheb AM (2011) Wind turbines theory-the Betz equation and optimal rotor tip speed ratio. Fundam Adv Top Wind Power 1(1):19–38
Ohunakin OS, Oyewola OM, Adaramola MS (2013) Economic analysis of wind energy conversion systems using levelized cost of electricity and present value cost methods in Nigeria. Int J Energy Environ Eng 4(1):2
Taner T (2018) Economic analysis of a wind power plant: a case study for the Cappadocia region. J Mech Sci Technol 32(3):1379–1389
Mathew S, Philip GS (2011) Advances in wind energy and conversion technology, vol 20. Springer, Berlin
Taner T, Demirci OK (2014) Energy and economic analysis of the wind turbine plant’s draft for the Aksaray city. Appl Ecol Environ Sci 2(3):82–85
SPSS (2020) Statistical Package for the Social Sciences, IBM Inc. https://www.ibm.com/analytics/spss-statistics-software. Accessed 10 Mar 2020
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2020 Springer Nature Switzerland AG
About this chapter

Cite this chapter
Harish, V.S.K.V., Sant, A.V. (2020). Grid Integration of Wind Energy Conversion Systems. In: Pathak, P., Srivastava, R.R. (eds) Alternative Energy Resources. The Handbook of Environmental Chemistry, vol 99. Springer, Cham. https://doi.org/10.1007/698_2020_610
Download citation
DOI: https://doi.org/10.1007/698_2020_610
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-57922-7
Online ISBN: 978-3-030-57923-4
eBook Packages: Chemistry and Materials ScienceChemistry and Material Science (R0)