
Abstract
This chapter presents a compilation of the boundary integral equations for linear and geometrically nonlinear bending analysis of moderately thick plates. The plate models used account for shear influence by using the first-order plate theories of Mindlin and Reissner. An unified integral formulation for the plate models employed is derived for the corresponding Navier’s operator, and higher-order terms of the Green strain tensor are included, so that the membrane-bending coupling is included in order to describe completely large displacement plate bending problems. The analytic derivation of the convective terms for geometrically nonlinear analysis is presented. The existence conditions for the non-null convective terms are clearly stated. An integral equation formulation for linear bending and elastic stability problems can be obtained by linearization of these equations.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


13.1 Introduction
Numerical solutions for geometrically nonlinear bending of moderately thick plates are well reported in the literature. Among the conventional numerical methods used to solve this type of problem, the boundary element method (BEM) has been receiving relatively little attention on the subject, in spite of the excellence of the results obtained with the method for linear problems [We82, KaTe88] [RaEtAl97, Ra15]. Many reasons have contributed to prevent the general application of the BEM in nonlinear problems. The generality of the finite element method is obviously one of them, but some mathematical aspects inherent to integral equation methods have contributed as well. As one of these aspects, one could mention the so-called convective (or free) terms that arise in derivative integral equations, as these terms are sometimes misunderstood or even missing from the equations.
The objective of this chapter is to outline the deduction of the convective terms appearing in integral equations for large displacement analysis of Mindlin and Reissner plate models. There are only few works exploring the solution of geometrically nonlinear thick-plate bending problems using the BEM [XiEtAl90, Vi90, Ji91, XiQui93, SuEtAl94, Ra98]. However, most of them do not present the derivation of the free terms, and, in addition to the best of the author’s knowledge, no one shows results for maximum transverse displacement far beyond the plate thickness magnitude. The present work aims to outline a clear and didactic derivation of such terms, as they are quite common in nonlinear applications using boundary integral equation methods.
The Mindlin and the Reissner plate theories are very well-known structural models. In his celebrated work, E. Reissner [Re44] started from a stress field and a mixed variational principle to obtain the equilibrium equations. The Hencky–Bollé–Mindlin (or simply Mindlin, as it is generally known) plate model [Bo47, Mi51] can be more easily obtained departing from a kinematical point of view, where the Kirchhoff–Love normality (thin plate) condition is relaxed.
In all expressions throughout this chapter, Greek indices range from 1 to 2, while Latin indices range from 1 to 3. Here, u contains the membrane (in-plane) and transverse plate displacements, respectively (i.e., u α and u 3), while ψ α are the plate rotations. All variables are referred to the plate’s middle surface. If taken pointwise across the thickness, the displacement field of the Reissner model is more complex than postulated in Eq. (13.1). However, the middle surface fields remain valid for this model if it is interpreted as a weighed mean value of the displacement field across the thickness h.
The in-plane displacements are included in Eq. (13.1) because the two-dimensional elasticity behavior will be superimposed on the plate bending equations, aiming the derivation of equilibrium equations for geometrically nonlinear bending problems. These are found to be written in terms of resultant stresses following the reasoning of reference [Fu65].
Here, N αβ are the in-plane (membrane) forces, Q α are the shear forces, and M αβ are the bending moments. The symbols q α and q 3 stand for in-plane and transverse loadings, respectively, while m α are the distributed moments. Equation (13.2) can be recovered in terms of displacements through the stress–displacement relations.
Further, \(C=\frac {Eh}{(1-\nu ^{2})}\), \(D=\frac {Eh^{3}}{12(1-\nu ^{2})}\), \(\lambda ^{2}=\frac {12\kappa ^{2}}{h^{2}}\), and κ 2 is the shear stress correction factor. In comparison to the plate theory commonly used, the only visible difference in Eq. (13.3) is the expression for the moments, which has an additional term in the Reissner plate model.
In order to unify the equilibrium equations in the same computational model, a plate model factor (m f) is employed [WeBa90].
where
Equation (13.2) describes moderately thick-plate bending problems for large displacements and a moderately large rotations regime [Fu65]. In view of Eq. (13.5), they can be used regardless of the plate model considered, including the classical Kirchhoff–Love model. The presence of the nonlinear terms in Eq. (13.3) is a consequence of relevant higher-order terms kept in the Green–Lagrange strain tensor. Both the linear and nonlinear contributions can be further evidenced by writing,
where
Upon substituting these into the equilibrium equations, one obtains the (coupled) Navier equations of the problem, where the nonlinear terms are added to the loading terms in a general system.
Here, m L is the differential operator of the linear membrane equilibrium problem, f L is the linear bending operator, m u = {u 1 u 2}T are the in-plane displacements, and f u = {ψ 1 ψ 2 u 3}T are the plate displacements. The membrane-bending coupling is implicit in the corresponding pseudo-loadings \(^{m}\hat {\mathbf {q}}\) and \(^{f}\hat {\mathbf {q}}\).
The complete expressions of the terms used in Eqs. (13.9) and (13.10a)–(13.10b) are as follows.
Equations (13.2) and (13.3)—with Eq. (13.5) replacing equation (13.3b)—are taken herein as a starting point for an incremental integral formulation. Using the weighted residual method [BrEtAl84], the following Somigliana identities for boundary variables are obtained [XiEtAl90, Ra98, Ra15],
and
where the m and f prefixes refer to the membrane and the bending problem, respectively, and the non-integral terms m v β and f v i were included to account for concentrated loads inside the domain [KaSa85]. The symbols p and q denote source (collocation) and field points, where lower case letters indicate boundary points and upper case letters indicate domain points, respectively. The corresponding displacement (m U ij and f U ij), traction (m T ij and f T ij), and the other fundamental solution tensors can be found elsewhere ([We82, Ra98]). Equations (13.15) and (13.16) are easily particularized for internal points upon substituting m C αβ = δ αβ and f C ij = δ ij.
From Eqs. (13.15) and (13.16), it is evident that the evaluation of the derivatives of the transverse displacement (u 3) is required. They are present in the nonlinear membrane forces in the last integral of Eq. (13.15) and also in the last integral of Eq. (13.16). These terms are partially responsible for the membrane-bending coupling. In domain methods such as finite elements, it is typical to employ the derivatives of the shape functions, i.e., \(u_{i,_{\alpha }}=\phi _{i,_{\alpha }}u_{i}\), where ϕ i are the shape functions. Despite being simple, this approach may generate poor results when the global shape function is not able to represent accurately the gradients of the displacement field. Similar approaches can be used for boundary elements, but the use of higher-order domain cells becomes mandatory for acceptable results (see, for instance, [Vi90]). In the case of employing the boundary element method, there is no need to assume an a priori interpolated form for the displacement derivatives since equations (13.15) and (13.16) are already a strong form of the displacement field. Therefore, a more rigorous solution can be obtained by differentiation of these integral equations with respect to the coordinates x α(P). The procedure leads to the six additionally required integral equations for \(\psi _{\beta ,_{\alpha }}\) and \(u_{3,_{\alpha }}\).
Assuming that the displacement derivatives are required only at internal points, the differentiation of Eqs. (13.15) and (13.16) is straightforward as all their kernels become regular. However, the differentiation of the last two integrals on the right-hand side of both equations is rather tedious because the tensors \(^{m}V_{\beta \gamma ,_{\alpha }}\), \(^{f}V_{3i,_{\alpha }}\), \(^{m}U_{\alpha \beta ,_{\gamma }}\) and \(^{f}U_{i3,_{\beta }}\) have weak singularities when Q ≡ P. Taking into account the dimension of the corresponding integration domains, one can show that the integral containing f V is singular only in the case of Reissner’s plate model, while m V is always regular [WeBa90]. Unfortunately, the differentiation of integrals containing singular kernels does not obey the classical calculus rules, and they must be treated by means of the Leibnitz formula [Mi62, Bu78]. The formal derivation of such derivative integral equations produces the so-called convective terms [BrEtAl84], which must be added to the final expressions for \(\bar {u}_{\beta ,_{\alpha }}(P)\) and \(u_{3,_{\alpha }}(P)\).
A negative sign was added to all the integrals as the derivatives are assumed to be taken with respect to x α(P). The integrals on \(\varGamma {{ }_{1}^{\prime }}\) in Eqs. (13.17) and (13.18) are the aforementioned convective terms, and \(\varGamma {{ }_{1}^{\prime }}\) stands for a unit circle centered in P, where the derivation of the former is the objective of the present work. In the further, the main goal is to solve the analytical expressions for all four convective terms.
13.2 Derivation of the Convective Terms
This section details the analytical exposition of Eq. (13.19) following the steps described in reference [BrEtAl84]. Once these terms are obtained, the set of derivative integral equations for the translational displacements are completed. An inspection of Eqs. (13.15) and (13.16) reveals that the candidate terms that give origin to the convective terms are
where its derivation with respect to the coordinate axes leads to a general form for Eq. (13.19).
In order to keep the notation simpler, for convenience the prefixes m and f will be suppressed in the next paragraphs. In order to recover the complete representation of all expressions, one may consult equation (13.21).
Evaluation of \(\dfrac {\partial I_{i}^{N}}{\partial x_{\gamma }\left ( P\right ) }\)
Equation (13.20a) may be expressed as the limit
where \(M_{\alpha }(Q)=N_{\alpha \beta }(Q)u_{3,_{\beta }}(Q)\) and Ω 𝜖 is a unit circle centered at the source point P. The boundary of Ω 𝜖 is denoted \(\overline {\varGamma }_{\epsilon }\). Consequently, Eq. (13.20a) may be expressed by
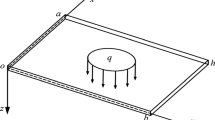
Using a polar coordinate system (\(\bar {r},\bar {\theta }\)) with origin at P ≡ o as depicted in Fig. 13.1, \(U_{i3{,_{\alpha }}}\) is rewritten considering only its strongly singular part.
Figure 13.1a shows the case with \(r(\bar {r},\bar {\theta })=\bar {r}\) and \(\phi (\bar {r},\bar {\theta })=\bar {\theta }\); however, if the source P is perturbed by a Cartesian increment Δx α, the parameters r and ϕ differ from \(\bar {r}\) and \(\bar {\theta }\), respectively, and the boundary \(\overline {\varGamma }_{\epsilon }\) changes as well (see Fig. 13.1b). This shows that \(\overline {\varGamma }_{\epsilon }\) is dependent on the load point location, so that for convenience one may cast equation (13.23) in polar coordinate system representation.
One should note that in Eq. (13.25) the integration limits vary with the integration variable, and when this dependence holds, the Leibnitz formula shall be used [SoRe58].
Applying Eq. (13.26) directly to Eq. (13.25) yields
Due to the fact that the origin of the coordinate system coincides with the source point P before the imposition of Δx α, and it remains there after the application of the increment, only \(\bar {\epsilon }\) changes with x α, while R does not. As a consequence, the last term on the right-hand side of Eq. (13.27) vanishes. Moreover, taking into account that \(r(\bar {\epsilon },\bar {\theta })=\epsilon =\bar {\epsilon }\) when P ≡ o, one obtains
Now it is instructive to investigate the existence of the first integral on the right-hand side of (13.28). Noting that
and defining \({\bar {\varLambda }}_{i3,_{\alpha \gamma }}(\phi )=r^{2}\frac {\partial }{\partial x_{\gamma }}\left ( \frac {{\varLambda }_{i3{,_{\alpha }}}(\phi )}{r}\right )\), the term
can be added and subtracted from Eq. (13.29), resulting in
All the integrals in Eq. (13.30) are limited, provided that the membrane-bending coupling satisfies the Hölder condition in P.
Due to the tensor \({\bar {\varLambda }}_{i3,_{\alpha m}}\) satisfying the property \(\int _{0}^{2\pi }\bar {\varLambda }_{i3,_{\alpha \gamma }}(\phi )\,d\phi =0\), the last two terms in Eq. (13.30) vanish. In addition, the first integral on the right-hand side is convergent since
which completes the demonstration.

Definition of the boundary \(\overline {\varGamma }_{\varepsilon }\) around the source point. (a) Initial configuration, (b) the effect of an increment Δx α applied to the source point coordinates
Now \(\partial I_{i}^{N}/\partial x_{\gamma }\) can be transformed back into Cartesian coordinates,
where the first integral shall be interpreted in terms of the Cauchy principal value (CPV). The second term on the right-hand side of (13.31) is the convective contribution, as it appears from a change in the position of the source point. In the present work, the interest remains in the development of the convective term particularized for i = 3 according to Eq. (13.19a).
Since the exterior normal of \({\varGamma _{1}^{\prime }}\) points to the center of the circle \(r_{,_{\alpha }}=-n_{\alpha }\), one can write the convective term as
with \(U_{33{,_{\alpha }}}^{s}\) containing only the singular part of \(U_{33{,_{\alpha }}}\). In the present case,
thus validating the representation (13.24). Using dΓ = r dϕ, then Eq. (13.32) is analytically defined by
Recalling (Fig. 13.1) that \(n_{1}=-\cos \phi \), \(n_{2}=-\sin \phi \) and using elementary trigonometric integrals, the following result is obtained.
This non-integral term is added to Eq. (13.18) replacing thus the first integral on \(\varGamma _{1}^{\prime }\). Note that the correction is necessary only in the singular case (P ≡ Q). A comparison to findings in the literature shows that Eq. (13.33) is in agreement with the results obtained by Xiao-Yan et al. [XiEtAl90].
Evaluation of \(\dfrac {\partial I_{i}^{q}}{\partial x_{\gamma }\left ( P\right ) }\)
The fundamental solution tensor used to take into account domain bending loadings in both the Mindlin and the Reissner plate models is given by ([WeBa90])
Following the procedure outlined in the previous section, Eq. (13.20b) is written in terms of a limit
so that its derivative results in
Now, the treatment has to be carried out for the Reissner model (m f = 1), otherwise f V =f U, and since \(\mathbf {U} = O \left ( \ln r\right )\), the first integral does not manifest strong singularities after the differentiation and will not provide convective terms. The second integral deserves a more careful inspection. Since the interest is in the derivative of the plate transverse displacement, Eq. (13.35) is particularized, considering from the outset only the necessary terms.
However, since \(U_{3\alpha ,_{\alpha }}\) is regular on Ω, it is not possible to apply the representation
and consequently, there is no convective contribution, as expected.
Evaluation of \(\dfrac {\partial J_{\alpha }^{N}}{\partial x_{\gamma }\left ( P\right ) }\)
In the case of Eq. (13.20c), one may follow the same spirit as lined out in the previous two paragraphs.
The first step is to write the integral as a limit,
and then introducing
one arrives at an expression that may be solved by the use of the Leibnitz formula.
Here, the first integral shall again be interpreted in the CPV sense, provided the nonlinear membrane forces satisfy the Hölder condition on P.
Upon analyzing Eq. (13.43), one identifies the expected convective term,
where \(U_{\alpha \beta {,_{{\delta }}}}\) is O(r −1), and consequently, the analytical representation of Eq. (13.45) is
Finally, using the relations \(n_{1}=-\cos \phi \) , \(n_{2}=-\sin \phi \) and elementary integrals of trigonometric powers leads to the following expression:
Evaluation of \(\dfrac {\partial J_{\alpha }^{q}}{\partial x_{\gamma }\left ( P\right ) }\)
In this case, m V =m U, and since \(\mathbf {U} = O \left ( \ln r \right )\), no convective term is involved,
13.3 Summary of the Results
All the relevant expressions obtained in the previous sections can be summarized as follows:
These equations are subject to the conditions
so that finally Eqs. (13.17) and (13.18) may be cast in their final form.
Note that Eqs. (13.49) and (13.50) are valid for interior points, and consequently, attention shall be paid to the singularities \(O\left ( 1/r^{2}\right ) \) in the integrals on the left-hand side, and \(O\left ( 1/r\right )\) and \(O\left (1/r^{2}\right )\) for the first and third integrals on the right-hand side. For boundary points, their limit to the boundary must be taken in order to obtain the corresponding geometric factors, i.e., the C matrix. In that case, the integrals on the left-hand side must be interpreted in the Hadamard sense, which demonstrates the hyper-singular character of these equations, while all remaining integrals are interpreted employing the CPV.
Moreover, using any traditional collocation-type process ([BrEtAl84]), Eqs. (13.15), (13.16), (13.49), and (13.50) lead to the following set of algebraic equations:
-
Membrane (2D elasticity) problem:
$$\displaystyle \begin{aligned} ^{m}\mathbf{H} \; {}^{m} \mathbf{u} = {}^{m}\mathbf{G} \; {}^{m}\mathbf{t} \; + \; {}^{m}\mathbf{B} \; + \; {}^{m}\mathbf{f}. {} \end{aligned} $$(13.51) -
Bending problem:
$$\displaystyle \begin{aligned} ^{f}\mathbf{H} \; {}^{f}\mathbf{u} = {}^{f}\mathbf{G} \; {}^{f}\mathbf{t} \; + \; {}^{f}\mathbf{B} \; \bar{\mathbf{u}}_{3} \; + \; {}^{f}\mathbf{f}. {} \end{aligned} $$(13.52) -
In-plane displacement derivatives:
$$\displaystyle \begin{aligned} {\mathbf{u}}^\prime_\beta \; + \; {}^{\beta}\mathbf{H} \; {}^{m}\mathbf{u} = {}^{\beta}\mathbf{G} \; {}^{m}\mathbf{t} \; + \; {}^{\beta}\mathbf{B} \; + \; {}^{\beta}\mathbf{f}. {} \end{aligned} $$(13.53) -
Transverse displacement derivatives:
$$\displaystyle \begin{aligned} {\mathbf{u}}^\prime_{3} \; + \; {}^{3}\mathbf{H} \; {}^{f}\mathbf{u} = {}^{3}\mathbf{G} \; {}^{f}\mathbf{t} \; + \; {}^{3}\mathbf{B} \; {\mathbf{u}}^\prime_{3} \; + \; {}^{3}\mathbf{f}, {} \end{aligned} $$(13.54)
where
13.4 Conclusions
This chapter presented a compilation of the relevant integral equations for linear and geometrically nonlinear bending, as well as elastic stability of moderately thick plates. The hyper-singular derivative integral equations for the displacement field were presented, including the corresponding convective terms. The resulting integral equations can be used to solve geometrically nonlinear bending problems, as well as in-plane extension, linear bending, and stability problems by particularization. Domain discretization is assumed for the domain integrals whenever necessary.
References
Bolle, L.: Contribution au probleme lineaire de flexion d’une plaque elastique. Bull. Techn. de la Suisse Romande 21, 281–285 (1947)
Brebbia, C.A., Telles, J.C.F., Wrobel, L.C.: Boundary Element Techniques: Theory and Applications in Engineering. Springer, Heidelberg (1984)
Bui, H.D.: Some remarks about the formulation of three-dimensional thermoelastoplastic problems by integral equations. Int. J. Solids Struct. 14, 935–939 (1978)
Fung, Y.C.: Foundations of Solid Mechanics. Prentice-Hall, Hoboken (1965)
Jianqiao, Y.: Non-linear bending analysis of plates and shells by using a mixed spline boundary element and finite element method. Int. J. Num. Meth. Eng. 31, 1283–1294 (1991)
Kamiya, N., Sawaki, Y.: An efficient BEM for some inhomogeneous and nonlinear problems. In: Brebbia, C.A., Maier, G. (eds.) Proceedings of the 7th International Sem. BEM, pp. 13–68. Villa Olmo (1985)
Karam, V.J., Telles, J.C.F.: On boundary elements for Reissner’s plate theory. Eng. Analy. 5, 21–27 (1988)
Marczak, R.J.: Revisiting some developments of boundary elements for thick plates in Brazil. Lat. Am. J. Solids Struct. 12, 948–979 (2015)
Marczak, R.J.: A boundary element formulation for linear and non-linear bending of plates. In: Idhelson, S. (ed.) Computational Mechanics - New Trends and Application. International Association for Computational Mechanics (1998)
Mindlin, R.D.: Influence of rotatory inertia and shear on flexural motions of isotropic, elastic plates. J. Appl. Mech. 18, 31–38 (1951)
Mikhlin, S.G.: Singular integral equations. Amer. Math. Soc. Transl., Ser. 1 10, 84–198 (1962).
Rashed, Y.F., Aliabadi, M.H., Brebbia, C.A.: On the evaluation of the stresses in the BEM for Reissner plate-bending problems. Appl. Math. Modelling 21, 155–163 (1997)
Reissner, E.: On the theory of bending of elastic plates. J. Math. Phys. 23, 184–191 (1944)
Sokolnikoff, I.S., Redheffer, R.M.: Mathematical of Physics & Modern Engineering. McGraw-Hill, New York (1958)
Sun, Y.B., He, X.Q., Qin, Q.H.: A new procedure for the nonlinear analysis of Reissner plate by boundary element method. Comput. Struct. 53(3), 649–652 (1994)
Vilmann, O.: The boundary element method applied in mindlin plate bending analysis. PhD Thesis, Department of Structural Engineering, Technical University of Denmark, Denmark (1990)
van der Weeen, F.: Application of the boundary integral equation method to Reissner’s plate model. Int. J. Num. Meth. Eng. 18, 1–10 (1982)
Westphal Jr., T., de Barcellos, C.S.: Applications of the boundary element method to Reissner’s and Mindlin’s plate models. In: Tanaka, M., Brebbia, C.A., Honma, T. (eds.) Proceedings of the 12th International Conference on BEM, vol. 1, pp. 467–477. Sapporo, Japan (1990)
Xiao-Yan, L., Mao-Kwang, H., Xiuxi, W.: Geometrically nonlinear analysis of a Reissner type plate by the boundary element method. Comput. Struct. 37, 911–916 (1990)
Xiao-Qiao, H., Qing-Hua, Q.: Nonlinear analysis of Reissner’s plate by variational approaches and boundary element methods. Appl. Math. Modelling 17, 149–155 (1993)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2022 The Author(s), under exclusive license to Springer Nature Switzerland AG
About this paper

Cite this paper
Marczak, R.J. (2022). A Unified Integral Equation Formulation for Linear and Geometrically Nonlinear Analysis of Thick Plates: Derivation of Equations. In: Constanda, C., Bodmann, B.E., Harris, P.J. (eds) Integral Methods in Science and Engineering. Birkhäuser, Cham. https://doi.org/10.1007/978-3-031-07171-3_13
Download citation
DOI: https://doi.org/10.1007/978-3-031-07171-3_13
Published:
Publisher Name: Birkhäuser, Cham
Print ISBN: 978-3-031-07170-6
Online ISBN: 978-3-031-07171-3
eBook Packages: Mathematics and StatisticsMathematics and Statistics (R0)