
Abstract
A framework for the asymptotic derivation of plate models from three-dimensional elasticity theory is reviewed and extended. This is shown to subsume the pure membrane and bending limits that have been derived via gamma convergence or alternative asymptotic methods, and to incorporate Koiter’s model for finite deformations with small midsurface strains. A model that accommodates large midsurface strains and which satisfies the relevant Legendre-Hadamard necessary condition for energy minimizers is also proposed.
Access provided by Autonomous University of Puebla. Download chapter PDF
Similar content being viewed by others

1 Introduction
Contemporary research on the theoretical foundation of theories of thin plates and shells emphasizes their relationship to three-dimensional finite elasticity theory. These efforts are typically based on the method of gamma convergence [1], concerned with the limiting variational problem for small thickness, or on asymptotic analysis of the weak forms of the equilibrium equations [2, 3]. However, neither method has generated a model that accommodates bending and stretching in a single framework. The current state of the art in the rigorous derivation of plate theory by gamma convergence is illustrated by [1], which concludes with the observation: “A wide open problem is the question of whether we can rigorously justify theories which are two-dimensional but still involve the small thickness parameter ... A typical case involves boundary conditions that cause part of the shell to stretch, but another part to bend with no stretching.” Indeed, such problems are of primary interest in applications. Evidently, then, at present there exists no rigorously derived model for combined bending and stretching. The situation brings to mind Koiter’s famous pun [4]: “Extreme rigour in the analysis of physical problems, we are inclined to believe, may easily lead to rigor mortis. ...Flexible bodies like thin shells require a flexible approach. ...”.
In contrast, the work of Hilgers and Pipkin [5,6,7], inspired by the need for a regularization of membrane theory for problems in which membrane theory has no solution, furnishes the first careful consideration of the relationship between plate theory and modern three-dimensional nonlinear elasticity in the presence of combined bending and stretching. This work subsumes the models obtained by asymptotic analysis and gamma convergence, and furnishes an extension of Koiter’s small-strain model [8, 9] to large midsurface strains. In view of these facts the failure of the community to acknowledge this body of work is discouraging. Perhaps this state of affairs may be attributed to the syndrome to which Koiter alluded.
A parallel approach based on asymptotic expansion of the local differential equations has recently been pursued by Dai and co-workers [10]. An interesting open question, originally posed by Koiter [4], concerns the relationship between the equations generated by this procedure and the Euler-Lagrange equations associated with the energies generated by the present approach.
In the present work we review the Hilgers-Pipkin model from the point of view developed in [11, 12] for thin elastic bodies. In particular, we relax some of the restrictive assumptions imposed in their treatment. Attention is confined to plates. This allows us to illustrate the main ideas as simply as possible while avoiding the less important details associated with the differential geometry of shells. Extensions of these ideas to shells are discussed in [13], and to materially-uniform bodies in [14, 15]. The latter framework accommodates a variety of inelastic phenomena.
Standard notation is adopted. Thus, we use bold face for vectors and tensors and indices to denote their Cartesian components. Latin indices take values in \(\{1,2,3\};\) Greek in \(\{1,2\}\). The latter are associated with surface coordinates and associated vector and tensor components. A dot between bold symbols is used to denote the standard inner product. Thus, if \(\mathbf {A}_{1}\) and \(\mathbf {A}_{2}\) are second-order tensors, then \(\mathbf {A}_{1}\,\mathbf {\cdot \,A}_{2}\,\,\mathbf {=\,}tr(\mathbf {A}_{1}\mathbf {A}_{2}^{t}),\) where \(tr(\cdot )\) is the trace and the superscript \(^{t}\) is used to denote the transpose. The norm of a tensor \(\mathbf {A}\) is \(\left| \mathbf {A}\right| =\sqrt{\mathbf {A\cdot A}}\). The notation \(\otimes \) identifies the standard tensor product of vectors. If \(\mathscr {M}\) is a fourth-order tensor, then \(\mathscr {M}[\mathbf {A]}\) is the second-order tensor with components \(\mathscr {M}_{iAjB}A_{jB}.\) We use Div to denote the three-dimensional divergence operator, and div its two-dimensional counterpart. For example, \(Div\mathbf {A=\,}A_{iA,A}\mathbf {e}_{i}\) and \(div\mathbf {A=}\) \(\mathbf {\,}A_{i\alpha ,\alpha }\mathbf {e}_{i}\), where \(\{\mathbf {e}_{i}\}\) is an orthonormal basis and subscripts preceded by commas are used to denote partial derivatives with respect to Cartesian coordinates. We also use \(\nabla \) to denote the two-dimensional gradient. The unit vector \(\mathbf {k=e}_{3}\) identifies the orientation of the plate midplane prior to deformation.
In the purely mechanical setting of nonlinear elasticity discussed here, the Piola stress \({\tilde{\mathbf P}}\) of the three-dimensional theory is given by the values of the function
the derivative with respect to the deformation gradient \({\tilde{\mathbf F}}\) of the strain energy \(\mathscr {W}({\tilde{\mathbf F})}\) per unit reference volume. The material is assumed to be uniform for the sake of simplicity, so that the strain-energy function does not depend explicitly on position \(\mathbf {x}\) in a reference configuration \(\kappa \). Superposed tildes are used to denote three-dimensional quantities. The same symbols, without tildes, are used to denote their midplane values.
The force per unit area transmitted across a surface with unit normal \(\mathbf {N}\) in \(\kappa \) is
It is well known that this, together with the equilibrium equation
are the natural boundary condition and Euler equation for energy-minimizing deformations under conditions of conservative loading without body force, holding on a subset of \(\partial \kappa \) and in \(\kappa \) respectively.
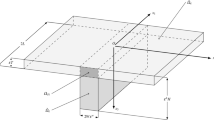
A plate is a material body identified with \(\kappa ,\) which is generated by the parallel translation of a plane region \(\varOmega ,\) with piecewise smooth boundary curve \(\partial \varOmega ,\) in the direction orthogonal to \(\varOmega .\) The body itself occupies the volume \(\bar{\varOmega }\times [-h/2,h/2],\) where \(\bar{\varOmega }=\varOmega \cup \partial \varOmega \) and h is the (uniform) thickness. Let l be another length scale such as the diameter of \(\varOmega \) or an interior hole. We assume that \(h/l\ll 1\). Further, we regard l as a fixed scale and adopt it as the measure of length. This allows us to put \(l=1 \) and thus to simplify the notation.
Our goal is an optimal expression for the term E in the expansion
of the potential energy \(\mathscr {E}\) of the thin three-dimensional body, in which \(h\ll 1\). This is shown below to have the form
in which \(E_{1}\) and \(E_{3}\) are not explicitly dependent on h. We will show that \(E_{1}\) is the conventional membrane energy, whereas \(E_{3}\) is associated with bending and strain-gradient effects.
If a particular deformation minimizes the three-dimensional energy; i.e., if it is stable, then the perturbation \(\varDelta \mathscr {E}\) relative to that deformation satisfies \(\varDelta \mathscr {E}\ge 0\) for any kinematically possible alternative. This in turn yields \(\varDelta E_{1}+o(h)/h\ge 0.\) Passing to the limit, we obtain \(\varDelta E_{1}\ge 0,\) and conclude that at leading order in thickness, stable deformations minimize the membrane energy. If attention is restricted to deformations that are strain-free at the midsurface, and if the boundary data are compatible with such deformations, then \(\varDelta E_{1}\) vanishes identically and the same argument yields \(\varDelta E_{3}\ge 0.\) In this case admissible deformations of the plate correspond to pure bending, and three-dimensional energy minimizers minimize \(E_{3}\), again at leading order in thickness. These observations underlie the approach to membrane and inextensional bending theory via gamma convergence. However, in the case of combined bending and stretching of a finite-thickness plate in which terms of order h and \(h^{3}\) are retained simultaneously, the inequality \(\varDelta \mathscr {E}\ge 0\) satisfied by equilibria in the three-dimensional theory does not imply that \(\varDelta E\ge 0.\) This is the reason why the method of gamma convergence, which is concerned exclusively with the derivation of the limiting minimization problem, has not succeeded in generating a single model for combined bending and stretching, except in the fortuitous circumstance - exemplified by special cases of the linear theory—when the two effects decouple at leading order [16]. Accordingly, we do not expect E to be minimized at a stable equilibrium state. One may seek to rectify this situation by expanding the energy to higher orders in h. However, in the nonlinear theory it is impractical to do so, as this requires higher-order three-dimensional elastic moduli [3], which are excessively unwieldy for strain-energy functions commonly used in nonlinear elasticity theory.
An interesting exception to the foregoing observation occurs when \(E_{1}=O(h^{2}).\) In this case \(\mathscr {E}/h^{3}=\bar{E}+o(h^{3})/h^{3},\) where \(\bar{E}\) does not depend explicitly on h. Passing to the limit, we conclude that minimizers in the exact theory correspond to minimizers in the approximate theory; that is, if a deformation minimizes \(\mathscr {E},\) than it also minimizes \(\bar{E}\) at leading order, and vice versa. This situation obtains in the case of wrinkling, in which the energies of stretching and bending are of comparable order [17,18,19]. We will show that in such circumstances \(\bar{E}\) may be identified with Koiter’s expression for the energy. This fact lends further support to the widespread view [20] that Koiter’s model provides the best ’all-around’ theory of plates and shells, despite the fact that it does not emerge as a gamma limit or a formal asymptotic limit.
Of course, there is also a need for a single model of combined stretching and bending when the two contributions to the energy are not comparable in magnitude. This case calls for careful consideration, detailed in Sect. 8.
We assume throughout that equilibrium deformations satisfy the strong-ellipticity condition
where
is the tensor of elastic moduli. It is well known that this condition must hold pointwise in the body if \({\tilde{\mathbf F}(\mathbf {x})}\) is the gradient of an energy-minimizing deformation.
We shall also make use of the strain-dependent elastic moduli \(\mathscr {C}({\tilde{\mathbf E}),}\) where
is the strain in which \(\mathbf {I}\) is the identity for 3-space, and
in which
is the associated strain-energy function. An application of the chain rule, combined with the minor symmetries of \(\mathscr {C}\), furnishes
for any tensor \(\mathbf {A,}\) where
is the symmetric second Piola-Kirchhoff stress, given in terms of the Piola stress by
We assume \(\mathscr {U}(\cdot )\) to be convex in a neighborhood of the origin in strain space, with the origin furnishing an isolated local minimum. Thus \({\tilde{\mathbf S}}\) vanishes at zero strain, and \(\mathscr {C}\mathbf {(0)}\) is positive definite in the sense that \(\mathbf {A}\cdot \mathscr {C}\mathbf { (0)[A]}>0\) for all non-zero symmetric \(\mathbf {A.}\) Then,
It follows from (11), (14) that
and hence that our hypotheses yields strong ellipticity at zero strain, as in classical linear elasticity theory.
2 Small-Thickness Estimate of the Energy
Position in the reference placement of the plate may be written
where \(\mathbf {u\in \,}\varOmega \) and \(\varsigma \in [-h/2,h/2]\). We assume the origin to lie on \(\varOmega \). The projection
is the identity on the translation space \(\varOmega ^{\prime }\) of \(\varOmega \). The three-dimensional deformation gradient satisfies \(d{\tilde{\mathbf y}=\tilde{\mathbf {F}}}d\mathbf {x}\), where \({\tilde{\mathbf y}=\tilde{\chi }(\mathbf {x})}\) is the position after deformation of the material point \(\mathbf {x}\) and \({ \tilde{\varvec{\chi }}}\) is the deformation function. Using this with \({\tilde{\mathbf y }=\hat{\mathbf{y }}(\mathbf u ,}\varsigma )={\tilde{\varvec{\chi }}(\mathbf {u}+}\varsigma \mathbf {k})\) and \(d\mathbf {u}\in \,\varOmega ^{\prime }\) yields the alternative representations
where \(\nabla ()\) is the (two-dimensional) gradient with respect to \(\mathbf {u}\) at fixed \(\varsigma \) and the notation \(()^{\prime }\) is used to denote \(\partial ()/\partial \varsigma \) at fixed \(\mathbf {u.}\) It follows from \(\tilde{\mathbf F}=\tilde{\mathbf F}{} \mathbf 1 +\tilde{\mathbf F}{} \mathbf{k}\otimes \mathbf k \) that
where \({\hat{\mathbf F}} (\mathbf{u},\varsigma ) = {\tilde{\mathbf F}(\mathbf {u}+\,}\varsigma \mathbf {k}).\)
The total strain energy in a given deformation is
If \({\tilde{\varvec{\chi }}}(\mathbf {x})\) is sufficiently smooth, then by Leibniz’ Rule and Taylor’s Theorem, applied to the small parameter h,
where, by the chain rule,
in which
and
From (19) we have
It follows that
where
in which
are independent functions of \(\mathbf {u}\in \,\varOmega \mathbf {.}\) These are the coefficient vectors in the order—\(\varsigma ^{3}\) expansion
Here \(\mathbf {r(u)}\) is the position of a material point on the deformed image \(\omega \) of the midsurface \(\varOmega ;\) its gradient \(\nabla \mathbf {r}\) maps \(\varOmega ^{\prime }\) to the tangent plane \(T_{\omega }\) to \(\omega \) at the material point \(\mathbf {u.}\) The functions \(\mathbf {d(u),\,g(u)}\) and \(\mathbf {h(u)}\) provide information about the three-dimensional deformation in the vicinity of the midplane.
The regularity of the three-dimensional deformation required by the expansion (29) is not implied by Ball’s existence theory for equilibria [21]. Nevertheless, any piecewise \(C^{2}\) equilibrium deformation, possessing a potential jump in its normal derivative across a smooth surface in \(\kappa \), is in fact \(C^{2}\) in the presence of strong ellipticity. It is straightforward to show that it is actually \(C^{n}\) for arbitrary n. Further, in [22] strong ellipticity is used with degree-theoretic arguments to obtain partial existence results for classically smooth (i.e., \(C^{2})\) equilibria, albeit under pure displacement boundary data. Given our adoption of strong ellipticity, it is thus natural to describe equilibria in terms of Euler equations for a suitable energy functional evaluated on the class of deformations represented by (29).
We write the strain energy as
where
in which
is the order—\(h^{3}\) strain energy per unit area of \(\varOmega \). We show below that this formula subsumes the strain energies associated with conventional membrane theory and inextensional bending theory.
We remark that this expression does not furnish the complete strain energy for the order—\(\varsigma ^{3}\) truncation of the three-dimensional deformation. The latter contributes additional terms at higher order in h. However, rather than model a given truncation, our objective here is an accurate order—\(h^{3}\) expression for the potential energy that is as accurate as possible by the standard of the three-dimensional theory and which yields a meaningful minimization problem in its own right.
In [7] a through-thickness expansion scheme for the three-dimensional deformation is adopted which has the effect of suppressing the term involving \(\nabla \mathbf {g}\) in the order—\(h^{3}\) potential energy. However, the leading-order term in that scheme is not the deformation of the midplane. Instead, it is the average of the deformation through the thickness. In general, the value of \(\varsigma \) at which this average is attained depends on the deformation and is not known in advance. Thus, the formulation given in [7] has the inconvenient feature that the surface whose deformation is described by the theory cannot be identified beforehand. We show here that the present expansion scheme ultimately yields an expression for the energy equivalent to that given in [7], but with the leading-order term given by the deformation \(\mathbf {r(u)}\) of the midplane.
To obtain an order—\(h^{3}\) expansion of the potential energy of the loads, we first consider the simplest case in which \(\partial \varOmega \) consists of the union of disjoint arcs \(\partial \varOmega _{e}\) and \(\partial \varOmega _{n},\) where essential and natural boundary conditions, respectively, are specified. For example, suppose three-dimensional position is assigned on \(\partial \kappa _{C_{e}}=\partial \varOmega _{e}\times C,\) where \(C=[-h/2,h/2].\) We refer to this as a clamped edge. If dead loads are assigned on \(\partial \kappa _{C_{n}}=\partial \varOmega _{n}\times C,\) then the potential energy of the three-dimensional body is \(\mathscr {E=S-L},\) where \(\mathscr {S}\) is the total strain energy defined by (20), and
is the load potential, in which \({\tilde{\mathbf p}}(\mathbf {x)}=\hat{\mathbf {p}}(\mathbf {u},\varsigma )\) is the assigned (three-dimensional) Piola traction. Using a formula like (21), it is straightforward to show that
where
with
and with
in which \(\mathbf {p}_{r}\), \(\mathbf {p}_{d}\) and \(\mathbf {p}_{g}\) are assigned and the primes identify derivatives of the three-dimensional traction with respect to \(\varsigma ,\) evaluated at \(\varsigma =0.\) The order—\(h^{3}\) estimate of the potential energy is thus given by
with
Comparison with (5) furnishes
and
We also consider conservative pressure loads. In this case the plate is fixed along the entire edge \(\partial \varOmega ,\) and \(\partial \varOmega _{n}\) is empty. We suppose a volume of compressible gas to be bounded by the lower lateral surface \(\partial \kappa ^{-}\) of the plate together with the walls of a rigid container; the plate is, in effect, a deformable lid. Let \(\mathscr {V}^{-}\) be the enclosed volume; i.e., the volume of the compressible gas. The pressure-volume relation of the gas is given by the function \(p^{-}(\mathscr {V}^{-}).\) We further assume the upper lateral surface of the plate, \(\partial \kappa ^{+},\) to be acted upon by a uniform pressure \(p^{+}\) of fixed intensity. It is shown in [12] that
apart from an unimportant constant, where the superscript \(^{*}\) refers to the cofactor. The tractions on the upper and lower lateral surfaces are
where \(\mathbf {F}^{\pm }=\,\hat{\mathbf F}(\mathbf{u},\pm h/2)\). Further, the load potential is [12]
where \(\mathscr {V}_{0}^{-}\) is an arbitrary constant and
is the volume of the deformed plate.
We suppose that
with \(P^{\pm }=O(1)\) and \(n=1\) or \(n=3.\) It is then easy to show that
where
and
where \(\mathbf {n}\) is the unit normal to the deformed midsurface \(\omega ,\) \(\alpha \) is the areal stretch of the midsurface, and Nanson’s formula has been used in the form
with \(\alpha =\left| \mathbf {F}^{*}\mathbf {k}\right| .\) Using (26)\(_{1}\) with \(\mathbf {F}^{*}\mathbf {k=Fe}_{1}\times \mathbf {Fe}_{2},\) we obtain \(\alpha \mathbf {n=(}\nabla \mathbf {r)e}_{1}\times \mathbf {(}\nabla \mathbf {r)e}_{2}\) and thus reduce (48) to a functional of the midsurface position field. We note in passing that the determinant of the deformation gradient, evaluated at the midplane, is \(J=\mathbf {Fe}_{1}\times \mathbf {Fe}_{2}\cdot \mathbf {Fk.}\) Thus,
Accordingly, the requirement \(J>0\) is equivalent to the requirement \(\mathbf { d}\in S_{+},\) where \(S_{+}\) is the half-space
We do not impose bulk incompressibility in the present work, although doing so presents no difficulty.
3 Membrane Limit
Membrane theory is associated with the leading order energy in (5). Thus,
where
is the membrane energy in the dead-load boundary-value problem. In the case of pressure loading with \(n=1\) in (48), the relevant energy is
where V is defined in (49). In either case the energy is a functional of the midplane deformation field \(\mathbf {r}\) and the director field \(\mathbf { d.}\)
The energy is stationary with respect to \(\mathbf {d}\) if and only if the membrane is in a state of plane stress; i.e.,
From (1) and (13) we then have that \(\mathbf {Sk=0,}\) which combines with the symmetry of \(\mathbf {S}\) to yield
To prove that (56) may be solved uniquely for \(\mathbf {d,}\) we first show that any solution, \({\bar{\mathbf d}}\) say, minimizes \(\mathscr {W}\) pointwise. To this end we fix \(\nabla {\mathbf {r}}\) and define \(M( \mathbf {d)}=\mathscr {W}(\nabla {\mathbf {r}+{\mathbf d}\otimes {\mathbf k}).}\) Let \( \mathbf {d(}u)\) be a twice-differentiable function. The derivatives of \( \sigma (u)=M(\mathbf {d(}u\mathbf {))}\) are
and
Thus,
vanishes by (56), whereas
where \(\mathscr {A}\mathbf {(F)}\) is the acoustic tensor defined, for any vector \(\mathbf {v,}\) by
This is positive definite by virtue of the strong ellipticity condition (6).
We conclude that \(\ddot{\sigma }>0\) on straight-line paths defined by \(\mathbf {d(}u)=u\mathbf {d}_{2}+(1-u)\mathbf {d}_{1}\) with \(\mathbf {d}_{1},\mathbf {d}_{2}\in S_{+}\) fixed and \(0\le u\le 1.\) These paths are admissible because the domain \(S_{+}\) of \(M(\cdot )\) is convex. Integrating with respect to u yields \(\dot{\sigma }\mathbf {(}u)>\dot{\sigma }(0\mathbf {)} \) for \(u\in (0,1]\) and \(\sigma (1)-\sigma (0)>\dot{\sigma }(0)\), proving that \(M(\mathbf {d)}\) is a strictly convex function; i.e.,
for all unequal pairs \(\mathbf {d}_{1},\mathbf {d}_{2}.\) It follows that M is minimized absolutely at a stationary point and hence that (56) has a unique solution \({\bar{\mathbf d}}(\nabla \mathbf {r)}\).
An interesting and heretofore unknown corollary is that for a given midplane deformation, the strain energy is minimized absolutely when the midplane is in a state of plane stress.
With this solution incorporated, the membrane energy reduces to the functional of \(\mathbf {r}\) defined by (54) or (55) with their integrands replaced by \(\mathscr {W}(\nabla \mathbf {r}+{\bar{\mathbf d}}(\nabla \mathbf {r)}\otimes \mathbf {k).}\) However, it transpires that this function fails to satisfy the relevant (two-dimensional) Legendre-Hadamard condition, even if \(\mathscr {W}\) is strongly elliptic in the three-dimensional sense. This is due to the presence of compressive stresses in the plane stress-deformation relation, whereas such stresses are precluded by the Legendre-Hadamard condition [23].
To elaborate, we define the membrane strain-energy function
Its derivatives are
where \(K_{ji\alpha }=\partial \bar{d}_{j}/F_{i\alpha }\) and \(F_{iA}\) are the components of (26)\(_{1}\) with \(F_{i\alpha }=\) \(r_{i,\alpha }\) and \(F_{i3}=d_{i}.\) The derivatives \(\partial \mathscr {W}/\partial d_{j}\) vanish identically by (56), yielding
The associated moduli are
The operative Legendre-Hadamard necessary condition for energy minimizers is [24]
For frame-invariant strain energies, this has the interesting consequence that the symmetric (plane) second Piola-Kirchhoff stress \(S_{\alpha \beta },\) defined by \(P_{i\alpha }=F_{i\gamma }S_{\gamma \beta },\) satisfies
and is thus positive semi-definite [23].
To see this we observe that by virtue of frame invariance, W is a function, U say, of the surface metric \(a_{\alpha \beta }=F_{i\alpha }F_{i\beta },\) or, equivalently, of the surface strain \(\epsilon _{\alpha \beta }=\tfrac{1}{2}(F_{i\alpha }F_{i\beta }-\delta _{\alpha \beta }),\) where \(\delta _{\alpha \beta }\) is the Kronecker delta. The chain rule then yields
in which we understand \(\epsilon _{\alpha \beta }\) to be replaced by \(\tfrac{1}{2}(\epsilon _{\alpha \beta }+\epsilon _{\beta \alpha })\) in the function U, with \(\epsilon _{\alpha \beta }\) and \(\epsilon _{\beta \alpha }\) being regarded as independent when computing the partial derivative. With this it follows by straightforward application of the chain rule that
where
are the plane-stress elastic moduli. These possess the usual major and minor symmetries.
The Legendre-Hadamard condition (68) may thus be reduced to
where \(z_{\mu }=x_{i}F_{i\mu }\) is a two-vector on the undeformed midplane. For the choice \(x_{i}=n_{i}\)—the unit normal to the deformed midsurface—\(z_{\mu }\) vanishes. We then obtain (69) and the conclusion that energy minimizers necessarily yield a stress field that is pointwise positive semi-definite. This severe restriction means that boundary-value problems based on W will generally fail to have energy minimizing solutions. In such circumstances well-posedness may be restored via relaxation, in which the function W is replaced by its quasiconvexification [25]; i.e., the largest quasiconvex function not exceeding W anywhere on its domain. The latter automatically satisfies the Legendre-Hadamard inequality at all deformations and provides the foundation for the tension-field theory of elastic membranes [26]. Precisely the same model emerges directly by the method of gamma convergence [27].
4 Pure Bending
For deformations that generate zero strain at the midplane, our constitutive hypotheses imply that the midplane stress \(\mathbf {P}\) and edge traction \(\mathbf {p}\) vanish identically, and hence that
where
in the case of dead loading. Moreover, the midplane value of the deformation gradient is then a rotation, \(\mathbf {R}\) say, implying that \(\nabla \mathbf {r=R1}\) and \(\mathbf {d=Rk=n}\), the unit normal to the deformed midsurface. Thus \(\mathbf {d}\) is determined by \(\nabla \mathbf {r};\) we write \({\mathbf {d}= \bar{\mathbf d}}(\nabla \mathbf {r)}\) as before. It follows that \(E_{b}\) is a functional of the midplane deformation and the vector field \(\mathbf {g.}\)
This energy is stationary with respect to \(\mathbf {g}\) if and only if
or
where \(\mathscr {A}\mathbf {(F)}\) is the acoustic tensor defined by (62). Thus (76) has the unique solution \({g=\bar{\mathbf g}}(\nabla \mathbf {r,}\nabla \nabla \mathbf {r),}\) say.
The solution \({\bar{\mathbf g}}\) also minimizes the strain energy. To see this we fix \(\nabla \mathbf {r}\) and define
Consider a parametrized path \(\mathbf {g(}u\mathbf {).}\) The derivatives of \(\sigma (u)=B(\mathbf {g(}u\mathbf {))}\) with respect to u are
and
where we have used the major symmetry of \(\mathscr {M}\). Thus,
vanishes by (76), and
Then, \(\ddot{\sigma }>0\) on straight-line paths defined by \(\mathbf {g(}u)=u\mathbf {g}_{2}+(1-u)\mathbf {g}_{1}\) with \(\mathbf {g}_{1},\mathbf {g}_{2}\) fixed and \(0\le u\le 1.\) These paths belong to the convex set \(E^{3}\), the domain of \(B(\cdot ).\) Integrating with respect to u yields \(\dot{\sigma }\mathbf {(}u)>\dot{\sigma }(0\mathbf {)}\) for \(u\in (0,1]\) and \(\sigma (1)-\sigma (0)>\dot{\sigma }(0)\), proving that the function \(B(\mathbf {g)}\) is strictly convex; i.e.,
for all unequal pairs \(\mathbf {g}_{1},\mathbf {g}_{2}.\) It follows that B is minimized absolutely at a stationary point and thus that the solution \({\bar{\mathbf g}}\) to (77) furnishes the optimal order - \(h^{3}\) energy.
The explicit energy is obtained from (75) on noting, from (11) with \(\mathbf {F=R}\), that
where
is the bending strain [1, 11].
Further, (74) implies that \(E_{b}\) furnishes the rigorous leading-order energy for isometric deformations of the midplane in the limit as thickness tends to zero. This result is in precise agreement with that obtained by formal asymptotic expansions [3] and the method of gamma convergence [1]. Nevertheless the result is not entirely satisfactory. For, Gauss’ Theorema Egregium implies that the deformed midsurface is necessarily developable; i.e, that it is a cylinder or a cone. Accordingly \(E_{b}\) does not furnish a model of plates that can be used in general applications. In view of this fact one is forced to conclude, in keeping with Koiter’s remark, that its rigorous derivation via gamma convergence is a somewhat overstated achievement as far as applications are concerned.
5 Asymptotic Model for Combined Bending and Stretching
Having derived the order—\(h^{3}\) expansion of the potential energy for a three-dimensional deformation (cf. (5), (40), (41)), we use it to derive energetically optimal director fields \(\mathbf {d}\) and \(\mathbf {g}\) for a given midplane deformation \(\mathbf {r.}\) That is, we minimize the energy with respect to these director fields at a fixed midplane deformation. Accordingly, we impose the stationarity condition
in which the superposed dot refers to the variational (or Gateaux) derivative. We regard this as an asymptotic expansion of the three-dimensional equilibrium statement \(\mathscr {E}^{\cdot }=0.\) Accordingly, we require
The first of these follows simply on dividing (86) by h and evaluating the resulting equation in the limit \(h\rightarrow 0;\) the second result then follows on division by \(h^{3}\) and passage to the same limit.
For a fixed midplane deformation (\({\dot{\mathbf r}=0),}\) Eq. (87)\(_{1}\) reduces to
in which the variation \({\dot{\mathbf d}}\) is arbitrary in \(\varOmega .\) This is valid under both dead-load and pressure loading conditions, with \(n=3\) in the latter case (cf. (48)). Accordingly, by the Fundamental Lemma,
where \(\mathbf {P=}\,\tilde{\mathbf P}(\nabla \mathbf {r}+\mathbf {d}\otimes \mathbf {k}).\) This is precisely the plane-stress condition (56), yielding \(\mathbf {d=}\bar{\mathbf d}(\nabla \mathbf {r)}\) and thus determining \(\mathbf {d}\) in terms of the midplane deformation field \(\mathbf {r.}\) Because we are considering the latter to be fixed, Eq. (87)\(_{2}\) reduces to
where the major symmetry of \(\mathscr {M}\) has been invoked. This also applies in the case of conservative pressure loading with \(n=3\) in (48) and with \(\partial \varOmega _{n}=\emptyset .\) Invoking (89) and integrating the term involving \(\nabla {\dot{\mathbf g}}\) by parts, using \({\dot{\mathbf g}}_{\mid \partial \varOmega _{e} }\mathbf {=0,}\) we reduce this to
which implies that
The second of these results is of course in precise agreement with the three-dimensional theory. However, the first is not. To see this we note that in the three-dimensional theory (3) holds at all points of the plate and hence on the midplane in particular, where it reduces to
We attempt to reconcile this with (92)\(_{1}\) by using the three-dimensional theory to relate \(\mathbf {P}^{\prime }\mathbf {k}\) to the tractions \({ \tilde{\mathbf p}}^{\pm }\) at the upper and lower lateral surfaces of the plate. With \(\mathbf {N=}\pm \mathbf{k}\) as appropriate, a Taylor expansion of (2) furnishes
Equivalently,
Then, if \({\tilde{\mathbf p}}^{\pm }=O(h^{3}),\) as in the case of pressure loading with \(n=3\) (cf. (43)), we conclude that
The first of these is consistent with the prediction (89), whereas the second implies that (92)\(_{1}\) and (93) are consistent with each other in the sense that both yield the estimate \(div(\mathbf {P1)}=O(h^{2}).\) With this information we may re-write (41) as
where we have made use (92)\(_{2}\) and (89), the latter implying that \(\mathbf {d=}\bar{\mathbf d}(\nabla \mathbf {r),}\) which we assume to hold on the closure of \(\varOmega .\) Recalling that \(E_{3}\) is multiplied by \(h^{3}\) in the expansion (5), we are justified in suppressing terms of order \(O(h^{2})\) in \(E_{3}\) as this does not affect the accuracy of the expansion. For consistency we must then suppress \({\mathbf {P}^{\prime }{} \mathbf{k};}\) i.e., we must impose
which, as we have seen in the case of pure bending, uniquely determines \( \mathbf {g=}\,\bar{\mathbf g}(\nabla \mathbf {r,}\nabla \nabla \mathbf {r)}\) in \(\varOmega .\) With \(\mathbf {g}_{\mid \partial \varOmega _{e}}\) fixed by the data for the three-dimensional parent model, and with \(\mathbf {P}\) now determined by \(\nabla \mathbf {r,}\) we conclude that if the part \(\partial \varOmega _{e}\) of the boundary is clamped; i.e., if \(\mathbf {r}\) and the normal derivative \(\mathbf {r}_{,\nu }\) are assigned thereon, then the full gradient \(\nabla \mathbf {r,}\) consisting of the normal and tangential derivatives of \(\mathbf {r,}\) is likewise fixed on \(\partial \varOmega _{e}\) and hence that the integral \(\int _{\partial \varOmega _{e}}\mathbf {P1}\nu \cdot \mathbf {g}ds\) is fixed by the data. Accordingly its variational derivative vanishes and the energy may be effectively reduced to
which is a functional of \(\mathbf {r}\) alone. Because of (98) we may simplify the first integrand to
but we refrain from doing this so as to preserve the symmetry of the original expression.
With the foregoing results in effect the approximate energy becomes
in the case of dead loading, in which \(\mathbf {p,}\) \(\mathbf {p}^{\prime }\) and \(\mathbf {p}^{\prime \prime }\) are assigned on \(\partial \varOmega _{n}.\) In the case of pressure loading with \(n=3\) in (48), the relevant energy is
In both cases this energy is a functional of the midplane deformation alone.
The solution \({\bar{\mathbf g}}\) to (98) involves the gradient \(\nabla {\bar{\mathbf d}}\) and may thus be expressed in terms of the first and second gradients, \(\nabla \mathbf {r}\) and \(\nabla \nabla \mathbf {r}\) respectively, of the midsurface deformation function \(\mathbf {r(u)}\). To derive the explicit form of this function we observe that the function \({\bar{\mathbf d}(}\nabla {{\mathbf {r}}})\) satisfies (56) identically in \(\nabla \mathbf {r}.\) We write the latter in the form
where \(F_{i3}=d_{i},\) and differentiate with respect to \(\nabla \mathbf {r}=r_{i,\alpha }\mathbf {e}_{i}\otimes \mathbf {e}_{\alpha }\) (with \(\mathbf {e}_{3}=\mathbf {k)}\), obtaining
where \(\mathscr {A}_{ik}\) are the components of the acoustic tensor defined in (62) and
Accordingly,
and the chain rule yields
Then, combining (77) in the form
with (106), we conclude that
and hence that the second integrand in (101) (or (102)) is a homogeneous quadratic function of the 2nd derivatives \(r_{k,\alpha \beta }.\) Moreover, as noted in the discussion of pure-bending theory, \({\bar{\mathbf g}}\) minimizes the energy E with respect to \(\mathbf {g.}\)
The patient reader may well wonder why the midplane deformation \(\mathbf {r}\) was held fixed (\({\dot{\mathbf r}=0)}\) in (87)\(_{1,2}.\) The reason is that (87)\(_{1}\) would otherwise yield the membrane problem which, as we have seen, fails to possess a solution unless the energy is replaced by its relaxation, whereas the purpose of the order—\(h^{3}\) expansion is to regularize the membrane problem. In this case it is logical to regard E as the operative approximate energy and to render it stationary with respect to \(\mathbf {r}\) to derive the relevant equilibrium problem. However, it transpires, rather unexpectedly, that the minimization problem for E is also typically ill-posed.
6 Reflection Symmetry and Ill-Posedness
As we have noted, there is no reason to suppose that minimizers of E, if any, are related to those of the three-dimensional energy \(\mathscr {E}\). Nevertheless, it is of interest to determine whether or not E admits minimizers. If a deformation \(\mathbf {r}\) minimizes E, then it satisfies the operative Legendre-Hadamard condition pointwise in \(\varOmega \). In the present context this is the requirement that the part of the energy density that is homogeneous quadratic in the 2nd derivatives \(r_{i,\alpha \beta }\) be non-negative definite when the \(r_{i,\alpha \beta }\) are replaced by \(v_{i}b_{\alpha }b_{\beta },\) with \(v_{i}\) an arbitrary 3-vector and \(b_{\alpha }\) an arbitrary 2-vector [24]. This restriction affects only the 2nd integrand in (101) (or (102)), which has the component form
Substituting (107) and (106), after some algebra we obtain
where
The relevant Legendre-Hadamard condition is thus given by
and this must hold for every \(v_{i}\) and \(b_{\alpha }.\)
It transpires that \(G_{i\alpha j\beta }=E_{i\alpha j\beta }\), the moduli for pure membrane theory (cf. (67)). To see this we compute a further derivative of (65), obtaining
and the claim follows on comparison with (112).
In view of the discussion leading to (73) and (69), we conclude that if \(a_{i}\) can be chosen to be aligned with the normal to the deformed midsurface, then minimizers of E must again deliver a plane 2nd Piola-Kirchhoff stress field that is pointwise positive semi-definite. Hilgers and Pipkin [7] have shown that this situation obtains in the practically important case in which the three-dimensional material possesses reflection symmetry with respect to the midplane \(\varOmega ;\) i.e., \(\mathscr {U}\mathbf {(E)}=\) \(\mathscr {U}\mathbf {(QEQ}^{t}\mathbf {),}\) with \(\mathbf {Q=I}-2\mathbf {k}\otimes \mathbf{k}.\) This severe restriction on the state of stress implies that minimizers of E generally fail to exist and therefore that solution procedures relying on the construction of energy-minimizing sequences of deformations cannot be applied. This is a serious drawback for the practical implementation of the theory.
We conclude that the minimization problem for E is generally ill-posed, despite the fact that the fields \({\bar{\mathbf d}}\) and \({\bar{\mathbf g}}\) minimize the energy for any given midsurface position field. In [7] this is addressed by introducing ad hoc strain-gradient terms which ensure that the Legendre-Hadamard condition is automatically satisfied without qualification. However, these regularizing terms are unrelated to the three-dimensional parent theory. Accordingly, in [7] the existence issue is addressed at the expense of accuracy.
7 Koiter’s Model
Another way to cure the problematic ill-posedness of E is simply to suppress the contribution of the stress to the order—\(h^{3}\) term in the energy. To justify this simplification we may suppose that \(S_{\alpha \beta }=O(h)\) at the outset. The constitutive hypotheses discussed in Sect. 1 then imply that the strain \(\epsilon _{\alpha \beta }=O(h),\) so that
where \(D_{\alpha \mu \beta \lambda }(\mathbf {0)}\) are the classical plane-stress elastic moduli evaluated at zero strain. In view of (11) the stress \(\mathbf {S}\) may then be suppressed in the second integral in (101) (or (102)) without affecting the order—\(h^{3}\) accuracy of E. The operative Legendre-Hadamard condition (113) is then reduced, with the aid of (71), to the inequality
where \(w_{\mu }=a_{i}F_{i\mu }\) and \(a_{i}\) is given by (113)\(_{2}\). That this inequality is automatically satisfied may be seen on observing that, for any \(\mathbf {A,}\)
in the present circumstances, and choosing \(A_{\alpha \mu }=y_{\alpha }w_{\mu }.\)
In the present circumstances the midplane strain energy is approximated by \(\tfrac{1}{2}D_{\alpha \mu \beta \lambda }(\mathbf {0)}\epsilon _{\alpha \mu }\epsilon _{\beta \lambda }+o(h^{2}).\) Because this is multiplied by h in (101) (or (102)), we then have that \(\mathscr {E}\)/\(h^{3}=\bar{E}+o(h^{3})/h^{3}\) where \(\bar{E}\) involves the sum of the integrals of a homogeneous quadratic function of the surface strain and a homogeneous quadratic function of the bending strain. Thus energy minimizers in the parent theory minimize \(\bar{E}\) at leading order in h. Further, the minimization problem for \(\bar{E}\) is well posed [20]. Remarkably, \(\bar{E}\) is precisely Koiter’s energy for combined bending and stretching [9, 13].
The difficulty, of course, is that the magnitude of the stress \(S_{\alpha \beta }\) is not known a priori and thus that the assumptions underpinning Koiter’s model, if true, can only be justified a posteriori. Fortunately, the feasibility of such a procedure is assured by the existence of minimizers of Koiter’s energy.
8 Proposed Model
It is important for the sake of practical analysis to have a well-posed order—\(h^{3}\) model for combined stretching and bending for use in general applications. This need stems from the availability and utility of robust numerical methods for computing energy minimizers directly and from the fact that it is not possible to exert control over the stress field a priori, as required in the establishment of Koiter’s energy on the basis of the three-dimensional theory. Further, it is unlikely that the community will accept a much more complex model based on higher-order expansion of the energy, its potential well-posedness notwithstanding.
To secure the desired model we note, with reference to (110) and (113), that the source of ill-posedness stems from the role played by the membrane moduli in the order—\(h^{3}\) term in the energy functional E. This in turn arises due to the use of the solution \({\bar{\mathbf g}}\) to (98) in the same term. To avoid this, we replace (101) (or (102)) by
where
in which \(\mathbf {d=}\bar{\mathbf d}\mathbf {(}\nabla \mathbf {r)}\) is imposed but the fields \(\mathbf {r(u)}\) and \(\mathbf {g(u)}\) are independent; i.e., we do not impose \(\mathbf {g=}\bar{\mathbf g}\). The Euler equation for \(\mathbf {g,}\) namely \(W_{\mathbf {g}}^{\prime }=\mathbf {0,}\) is equivalent to (98), which furnishes \(\mathbf {g=}\bar{\mathbf g}\). It follows that, in equilibrium, \(E^{\prime }[\mathbf {r,g]}\) and the order—\(h^{3}\) plate energy are equivalent insofar as the Euler equations and natural boundary conditions are concerned (see [12] for a derivation). Thus the equilibria of the order—\(h^{3}\) energy are precisely the equilibria of \(E^{\prime }[\mathbf {r,g].}\) Moreover, these equilibria render the two functionals equal.
To elaborate, consider the first variation
in which we have suppressed the load potential, which is not relevant to the present discussion. Equilibria in the approximate theory are, by definition, those states for which \(\dot{E}^{\prime }\) vanishes for all kinematically admissible variations \(\dot{r}_{i}\) and \(\dot{g}_{i}.\) This yields \(\partial W^{\prime }/\partial g_{i}=0\) in particular, which of course has the unique solution \(\mathbf {g=}\bar{\mathbf g}(\nabla \mathbf {r,}\nabla \nabla \mathbf {r}).\) Accordingly,
for all \(\nabla \mathbf {r}\) and \(\nabla \nabla \mathbf {r.}\) Differentiation of this identity yields
which may be used to simplify the equilibrium expression for the second variation \(\ddot{E}^{\prime }\) accordingly. Thus,
in which the first line vanishes due to the stationarity condition \(\dot{E}^{\prime }=0\) (cf. (120)) and all parenthetical terms are evaluated at the equilibrium state. Thus in equilibrium the second variation is a quadratic functional of \({\dot{\mathbf r}}\) and \({\dot{\mathbf g}.}\)
We now fix \({\dot{\mathbf r}}\) and minimize the second variation with respect to \({\dot{\mathbf g}.}\) This yields the stationarity condition
which in turn implies that
pointwise in \(\varOmega .\) The coefficient matrix is seen, with reference to (82), to be \(\partial ^{2}W^{\prime }/\partial g_{i}\partial g_{j}=\tfrac{1}{12}\mathscr {A}_{ij},\) where \(\mathscr {A}\) is the positive definite acoustic tensor defined in (62). Thus the minimizing value is \({\dot{\mathbf g}=0}\) and the second variation reduces to
at equilibrium. This is non-negative for all kinematically admissible \({\dot{\mathbf r}}\) if the deformation \(\mathbf {r}\) is a minimizer of \(E^{\prime }.\)
The operative Legendre-Hadamard necessary condition for minimizers in this case is the requirement that
pointwise in \(\varOmega ,\) for all \(v_{i}\) and \(b_{a}\) [24]. With reference to (107) and (119), this is found to be equivalent to
where the \(a_{i}\) are given by (113)\(_{2}\) and \(\mathscr {M}\) is evaluated at an equilibrium deformation. That this is so is an immediate consequence of three-dimensional strong ellipticity. Accordingly, the Legendre-Hadamard condition for (118) is automatically satisfied and imposes no a priori restrictions on the stress. This means that \(E^{\prime }[\mathbf {r,g]}\) meets a fundamental necessary condition for the existence of minimizers without qualification, whereas the order—\(h^{3}\) energy does so only under restrictive conditions which cannot be verified a priori. It is therefore appropriate to regard equilibria in the order—\(h^{3}\) model as minimizers of \(E^{\prime }[\mathbf {r,g],}\) although it remains to be proved that this functional actually possesses a minimizer. This question, which remains open, is addressed to the mathematically inclined reader.
References
Friesecke, G., James, R.D., Müller, S.: A hierarchy of plate models derived from nonlinear elasticity by gamma-convergence. Arch. Ration. Mech. Anal. 180, 183–236 (2006)
Ciarlet, P.G.: Mathematical Elasticity, Vol. 3: Theory of Shells. North-Holland, Amsterdam (2000)
Fox, D.D., Raoult, A., Simo, J.C.: A justification of nonlinear properly invariant plate theories. Arch. Ration. Mech. Anal. 124, 157–199 (1993)
Koiter, W.T.: Foundations and basic equations of shell theory. A survey of recent progress. In: Niordson, F.I. (Ed.) Theory of Thin Shells, Proceedings IUTAM Symposium, Copenhagen, pp. 93–15. Springer, Berlin (1969)
Hilgers, M.G., Pipkin, A.C.: Elastic sheets with bending stiffness. Q. Jl. Mech. Appl. Math. 45, 57–75 (1992)
Hilgers, M.G., Pipkin, A.C.: Bending energy of highly elastic membranes. Quart. Appl. Math. 50, 389–400 (1992)
Hilgers, M.G., Pipkin, A.C.: Bending energy of highly elastic membranes II. Quart. Appl. Math. 54, 307–316 (1996)
Koiter, W.T.: A consistent first approximation in the general theory of thin elastic shells. In: Koiter, W.T. (Ed.) Proceedings IUTAM Symposium on the Theory of Thin Elastic Shells, Delft, pp. 12–33. North-Holland, Amsterdam (1960)
Koiter, W.T.: On the nonlinear theory of thin elastic shells. In: Proceedings Knonklijke Nederlandse Akademie van Wetenschappen B69, pp. 1–54 (1966)
Song, Z.L., Dai, H.-H.: On a consistent dynamic finite-strain plate theory and its linearization. J. Elast. 125, 149–183 (2016)
Steigmann, D.J.: Thin-plate theory for large elastic deformations. Int. J. Non-linear Mech. 42, 233–240 (2007)
Steigmann, D.J.: Applications of polyconvexity and strong ellipticity to nonlinear elasticity and elastic plate theory. In: Schröder, J., Neff, P. (Eds.) CISM Course on Applications of Poly-, Quasi-, and Rank-One Convexity in Applied Mechanics, vol. 516, pp. 265–299. Springer, Wien and New York (2010)
Steigmann, D.J.: Koiter’s shell theory from the perspective of three-dimensional nonlinear elasticity. J. Elast. 111, 91–107 (2013)
Steigmann, D.J.: Mechanics of materially-uniform thin films. Math. Mech. Solids 20, 309–326 (2015)
de Feraudy, A., Queguineur, M., Steigmann, D.J.: On the natural shape of a plastically deformed thin sheet. Int. J. Non-lin. Mech. 67, 378–381 (2014)
Paroni, R.: Theory of linearly elastic residually stressed plates. Math. Mech. Solids 11, 137–159 (2006)
Cerda, E., Mahadevan, L.: Geometry and physics of wrinkling. Phys. Rev. Lett. 90, 1–4 (2003)
Healey, T.J., Li, Q., Cheng, R.-B.: Wrinkling behavior of highly stretched rectangular elastic films via parametric global bifurcation. J. Nonlin. Sci. 23, 777–805 (2013)
Taylor, M., Bertoldi, K., Steigmann, D.J.: Spatial resolution of wrinkle patterns in thin elastic sheets at finite strain. J. Mech. Phys. Solids 62, 163–180 (2014)
Ciarlet, P.G.: An Introduction to Differential Geometry with Applications to Elasticity. Springer, Dordrecht (2005)
Ball, J.M.: Convexity conditions and existence theorems in nonlinear elasticity. Arch. Ration. Mech. Anal. 63, 337–403 (1977)
Healey, T.J., Rosakis, P.: Unbounded branches of classical injective solutions to the forced displacement problem in nonlinear elastostatics. J. Elast. 49, 65–78 (1997)
Steigmann, D.J.: Proof of a conjecture in elastic membrane theory. ASME J. Appl. Mech. 53, 955–956 (1986)
Hilgers, M.G., Pipkin, A.C.: The Graves condition for variational problems of arbitrary order. IMA. J. Appl. Math. 48, 265–269 (1992)
Dacarogna, B.: Direct Methods in the Calculus of Variations. Springer, Berlin (1989)
Steigmann, D.J.: Tension-field theory. Proc. R. Soc. Lond. A429, 141–73 (1990)
Le Dret, H., Raoult, A.: The membrane shell model in nonlinear elasticity: a variational asymptotic derivation. J. Nonlin. Sci. 6, 59–84 (1996)
Acknowledgements
We gratefully acknowledge the support of the US National Science Foundation through grant CMMI-1538228.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2019 Springer Nature Switzerland AG
About this chapter

Cite this chapter
Shirani, M., Steigmann, D.J. (2019). Asymptotic Derivation of Nonlinear Plate Models from Three-Dimensional Elasticity Theory. In: Altenbach, H., Chróścielewski, J., Eremeyev, V., Wiśniewski, K. (eds) Recent Developments in the Theory of Shells . Advanced Structured Materials, vol 110. Springer, Cham. https://doi.org/10.1007/978-3-030-17747-8_30
Download citation
DOI: https://doi.org/10.1007/978-3-030-17747-8_30
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-17746-1
Online ISBN: 978-3-030-17747-8
eBook Packages: Chemistry and Materials ScienceChemistry and Material Science (R0)