
Abstract
In continuum biomechanics, models are typically classified into models appealing to phenomenological or so-called structural modeling approaches. However, this categorization often starts from the model itself and does not necessarily focus on the desired application and purpose of the utilized model. Particularly with regard to the future extension and the transfer of biomechanical models to clinical problems, this sometimes seems to be insufficient. In order to enhance interdisciplinary applicability, more universal and accurate designations of models should be sought. Above all, one should clearly state the aim of a specific model, e.g., whether it is intended to reproduce experimental data in silico or has explanatory intentions beyond that. Besides that, one should also clearly state the definition of the concept of phenomenology, which has in the context of mechanical models often a too negative connotation. Being clear about the aim and purpose and the hereby concluded choice of model(ling approach) helps to formulate models that have an optimal balance between complexity—and thus computational cost—and desired benefit. Herein, we aim to provide a concise overview, necessary definitions and implications on two short examples taken from the broad field of (continuum) biomechanics, namely, the modeling of collagen fibers and skeletal muscles.
Starting a new job in a completely new field of research and in a country as far away from Europe as one can imagine, in my case at the Auckland Bioengineering Institute at the University of Auckland in New Zealand, it was a matter of weeks, maybe even only days until your name kept popping up over and over again! It was obvious, there is a world-renowned expert in Europe that I must to get to know and meet. That was in 2004. Since then, we met in numerous occasions – a journey of scientific excitement, pleasure and joy. From my point of view, however, I must admit that I might not have realized your biggest accomplishment until returning to Europe and realizing the enormous kind of groundbreaking work you did in establishing the field of computational/continuum biomechanics here in Europe! Your work made many things for me easier. Many thanks for your hard work, your unremitting efforts, for all your impact you left on me and the community and all the great memories. All the best for the next 60 years!
Oliver
Access provided by Autonomous University of Puebla. Download chapter PDF
Similar content being viewed by others

1 Introduction
For several decades now, the broad field of continuum mechanics has found its way into applications in biology and biomechanics. In addition to modeling and understanding real processes, the clinical application of biomechanical simulations is now increasingly coming into focus. In this context, it is crucial that the scope, the level of detail and the desired benefit and goal of a model are clearly stated. This is particularly important in an interdisciplinary context when scientists from different fields of research work together. Understandably, however, models developed by engineers are often categorized using relatively non-standardized, engineering terms. Many such terms can be found in the literature, such as ad hoc, biophysical, empirical, micromechanical, micromechanically-based, microstructural, microstructurally-based, multiscale, phenomenological, physiological, single-scale, or structure-based, as well as more general namings such as computational, mathematical, mechanical, or multiphysics models.Footnote 1

A coarse identification of two different model types in continuum (bio)mechanics
These terms are not always clearly defined and often overlap in meaning. This means that certain models can be attributed to several of these terms. However, two fundamentally different model approaches emerge. We refer to them as type A and type B models, see Fig. 1. Such a classification is, however, anything but clear and the respective terms of a model type should under no circumstances be understood as synonyms. Roughly speaking, models of type A aim at a pure description of observed phenomena, whereas models of type B typically include more levels of detail and often have explanatory intentions. However, the individual terms within the model types can still have very specific meanings and should be used with caution to avoid ambiguity and imprecise descriptions of models. For more clarity, however, we should first explain a few important terms in more detail, starting with the model terms ‘phenomenological’ and ‘structural’ in the next section.
2 A Model-Based (‘Engineering’) Point of View: Phenomenological and Structural
A very common classification, especially in biomechanics, distinguishes between phenomenological and structural model approaches. A clear definition of the former can be found in Woo et al. (1993):
We refer to phenomenological models as those that do not have explicit parameters related to the microstructure of the tissue. This category includes a number of models, from those that are derived simply by curve fitting experimental data, to rigorously formulated continuum models. (Woo et al. 1993)
Another definition has been formulated by McMullin (1968):
[\(\ldots \)][A] phenomenological model appears to be an arbitrarily-chosen mathematically-expressed correlation of physical parameters from which the empirical laws of some domain can be derived. (McMullin 1968)
On the other hand, Woo et al. (1993) defines structural model approaches as follows:
Structural models are based on known (or assumed) behavior of the constituents of the tissue. The mechanical responses of the individual components are then combined or generalized to produce a description of gross mechanical behavior. [\(\ldots \)]they include parameters which are directly related to the structure of the tissue. (Woo et al. 1993)
These definitions are essentially based on the consideration of different length scales and the (self-evident) presence of a so-called microstructure of the material on smaller scales. The behavior of the material—that appears homogeneous on the macroscale—results from the interaction of different constituents/components—the heterogeneous microstructure—on the microscale.Footnote 2 Phenomenological approaches are purely based on the (mathematical) description of the macroscopically observed behavior and are indispensably linked to the process of calibrating the models to experimental data. In this connection, the macroscale is identified as the observation scale, at which effects and quantities like stresses or strains are observed and measured. In contrast, structural approaches include information on the microstructure of the material directly in the modeling process and do not necessarily require experimental data from the macroscale. However, it would be wrong to claim that phenomenological models are based on the neglection of the microstructure. On the contrary, by calibrating (‘curve fitting’) to experimental data—that naturally includes all small-scale effects and interactions—microstructural effects are of course fully taken into account. Rather, it should be made clear that phenomenological models take into account the microstructure in an implicit manner, whereas structural models aim at an explicit resolution of individual components of the material. This justifies some of the terms presented in Fig. 1, such as the term single-scale for phenomenological approaches, and multiscale, microstructural and micromechanical for structural approaches.
The above summarized definitions tie a very tight corset around the concept of phenomenological models, as they must not include parameters that are directly related to the microstructure and they must be based on the calibration to macroscopic experimental results. Further, this classification is strongly based on a model-oriented and not application-oriented point of view. Not necessarily the purpose or the benefit, but the model itself is the central structure of the classification.
Possible reasons that determine the choice between a phenomenological and a structural modeling approach are illustrated in Fig. 2. Therein, reasons (i)–(iii) are mainly linked to insufficient experimental data on the macroscale. If any (or even several) of those reasons holds true, the use of a phenomenological, single-scale modeling approach and the meaningfulness of the thereon-based results become limited and questionable. Structural, multiscale modeling approaches serve as a remedy to this problem. Instead of making use of experimental data only on the observation scale, a multiscale approach also takes into account data from smaller scales. Ideally, this shifts the constitutive modeling process and the necessary calibration step from the data-poor macroscale to data-rich(er) smaller scales. Of course, a multiscale approach only makes sense if the experimental data on the smaller scales is of better quality. While a multiscale approach due to reasons (i)–(iii) is rather a remedy to overcome the experimental limitations, reason (iv) is a more active motivation to utilize multiscale models. There, the material response on smaller scales and the influence of the microstructure on the macroscopic material response are of interest. Under these circumstances, the observation scale is no longer clearly defined, because phenomena on at least two scales are then of interest and the interconnections between the scales move into focus. Hence, to be able to explain a certain macroscopically observed material behavior, multiscale modeling approaches can be applied as sophisticated tool for a deeper investigation of phenomena across the scales. Finally, a multiscale approach in this context always has to be accompanied with appropriate upscaling and homogenization steps, such that the results become available on the macroscopic observation scale. Examples of such models can be found in many areas of biomechanics, such as the multiphase modeling of cement injection into vertebral bodies, see, e.g., Bleiler et al. (2015), the structurally-based modeling of myocardium and arteries, see, e.g., Holzapfel and Ogden (2009, 2010), or the multiscale modeling of skeletal muscles and general homogenization approaches by the authors, see, e.g., Röhrle et al. (2008), Röhrle et al. (2012), Wang et al. (2013) Heidlauf et al. (2016), Bleiler et al. (2019), Schmid et al. (2019), Röhrle et al. (2019) and Bleiler et al. (2021).

Motivation to switch to structural models
In the next section, a slightly different, rather philosophical and more application-based point of view for the classification of models is outlined.
3 An Application-Based Point of View: Phenomenological and Explanatory
In addition to the model terms commonly used in engineering and biomechanical applications, see Fig. 1, a variety of other designations can be found if the concept of a model is taken more broadly and the topic is explored more from a philosophical point of view. For instance, an extensive list of terms can be found in the article of Frigg and Hartmann (2020):
Probing models, phenomenological models, computational models, developmental models, explanatory models, impoverished models, testing models, idealized models, theoretical models, scale models, heuristic models, caricature models, exploratory models, didactic models, fantasy models, minimal models, toy models, imaginary models, mathematical models, mechanistic models, substitute models, iconic models, formal models, analogue models, and instrumental models (Frigg and Hartmann 2020)
A detailed analysis of all these terms is beyond the scope of this section, but the list highlights the wide range of names for models. Above all these terms there is a very fundamental level of categorization, in which models are classified into so-called representative, idealized and fictional. Very clear definitions for representative (or representational) models have been formulated by Craver (2006):
[\(\ldots \)]representational models, that is, those that scientists construct as more or less abstract descriptions of a real system. (Craver 2006)
as well as by Frigg and Hartmann (2020):
they[representative models] represent a selected part or aspect of the world, which is the model’s target system. (Frigg and Hartmann 2020)
In turn, idealized models are described by Frigg and Hartmann (2020) as follows:
Idealized models are models that involve a deliberate simplification or distortion of something complicated with the objective of making it more tractable or understandable. (Frigg and Hartmann 2020)
A common example for an idealized model is the neglection of friction in a mechanical system. However, here a certain difficulty in distinguishing between representational and idealized models is already apparent. In particular, there is a certain lack of clarity in the descriptions as to whether any model assumption is already an idealization. Yet, since model assumptions are indispensable in the formulation of mechanical models (that are usually not based on first principles), such a statement would make it impossible to formulate representative mechanical models and would therefore go too far.
Finally, Bokulich (2011) describes the third model form as follows:
[\(\ldots \)] by fictional model I mean simply a model that represents the world by means of fictional entities, states, or processes (and to distinguish fictional models from idealized models-specifically fictional entities or processes that are not related to the true ones in the world by what might be thought of as a distortion or series of successive cases). (Bokulich 2011)
Here too, the distinction between idealized and fictional models is at times difficult. We assume, however, that in biomechanics one rather finds idealized models and not purely fictional models without direct reference to a real application.
Once this first level of model classification has been introduced, a second level of distinction can be identified. To motivate this, we consult two statements of Craver (2006): ‘Not all models are explanatory. Some models are data summaries.’ as well as ‘There is a widely accepted distinction between merely modeling a mechanism’s behavior and explaining it.’ Here we apparently distinguish between models that have explanatory capabilities and those which model and replicate certain behaviors (‘data summaries’). Consequently, the latter approach can be identified as a rather phenomenological one, which leads us to the distinction between phenomenological and explanatory models, see also Bokulich (2011). This pairing seems to be very similar to that mentioned in the previous section, where we distinguished between phenomenological and structural models. However, the distinction considered here is still quite different, which can be illustrated by the following definitions. According to Bokulich (2011),
A phenomenological model is only of instrumental value to the scientist. Often–though not exclusively–they are constructed via an ad hoc fitting of the model to the empirical data. Phenomenological models are useful for making predictions, but they do not purport to give us any genuine insight into the way the world is. (Bokulich 2011)
whereas
An explanatory model, by contrast, does aim to give genuine insight into the way the world is. (Bokulich 2011)
The difference between the two model types is thus the ability to go beyond the mere reproduction of results and to provide explanatory insights into the underlying mechanisms. Of course, it can be stated that such explanatory models in the context of biomechanical problems usually lead to the formulation of multiscale approaches. One might therefore end up again with the distinction between phenomenological and structural approaches (or between other terms belonging to type A or type B in Fig. 1). However, the crucial difference is that the multiscale approach is the essential feature of structural models (an end in itself), whereas in the case of explanatory models it is a possible consequence (a means to an end). This means that the here presented classification proceeds from an application-based point of view, because it only shows itself through the application of the model and whether it has explanatory intentions or not. On the other hand, a purely phenomenological model has the characteristic of a blackbox that takes some input (calibrated parameters) and provides some output, without providing explanations on the underlying mechanism.
As far as explanatory models are concerned, a further classification is possible, which is based on the way underlying mechanisms are described. According to Machamer et al. (2000) and Craver (2006), one can distinguish between how-possibly and how-actually models. They are defined as follows:
How-possibly models (unlike merely phenomenal models) are purported to explain, but they are only loosely constrained conjectures about the mechanism that produces the explanandum phenomenon. They describe how a set of parts and activities might be organized such that they exhibit the explanandum phenomenon. (Craver 2006)
and
How-actually models describe real components, activities, and organizational features of the mechanism that in fact produces the phenomenon. They show how a mechanism works, not merely how it might work. (Craver 2006)
The first form thus describes models in which possible mechanisms are postulated and assumed, while the second form demands knowledge of them. Applied to mechanical problems, this means that how-actually models provide precise knowledge of the underlying causes of a macroscopic material response, e.g., by examining microscopic image data and exactly identifying the relevant microstructural components and their interplay. This last classification is very crucial as a preliminary consideration during the formulation of a model. In particular, it is important to consider whether the underlying mechanisms of the macroscopic behavior that is sought to be described are known at all. In this connection, however, it is directly evident that ‘complete’ descriptions of a material behavior across all scales are hardly possible and that certain simplifications must always be made. Craver (2006) commented: ‘[\(\ldots \)]ideally complete descriptions of a mechanism. Such models include all of the entities, properties, activities, and organizational features that are relevant to every aspect of the phenomenon to be explained.’ He further states: ‘In fact, such descriptions would include so many potential factors that they would be unwieldy for the purposes of prediction and control and utterly unilluminating to human beings.’ We may therefore assume that models usually lie in a range between the how-possibly and how-actually models. Machamer et al. (2000) refer to this intermediate range as how-plausibly models. In this context, it also has to be emphasized that an explanatory model is not improved by adding more details, but only by adding more relevant details, see Craver and Kaplan (2020).

Scheme of model classifications from a ‘philosophical’ point of view
The three levels of classification introduced in this section are finally summarized in Fig. 3. In this connection, it may seem somewhat confusing that explanatory approaches can be found in both representative and idealized models. In this regard, also Frigg and Hartmann (2020) posed the question:
Some models explain. But how can they fulfill this function given that they typically involve idealizations? Do these models explain despite or because of the idealizations they involve? Does an explanatory use of models presuppose that they represent, or can non-representational models also explain? (Frigg and Hartmann 2020)
Here, however, it is necessary to point out once again a certain ambiguity in the distinction between representative models and idealized models, especially with regard to how model assumptions are assessed. It makes sense that also idealized models (that, e.g., neglect viscous behavior due to quasi-static loading conditions) in mechanical applications can be explanatory.
Now that we have looked at the classification of models from a slightly different angle in this section, we should take another closer look at the concept of phenomenology. This follows in the next section.
4 The Strength (and Omnipresence) of Phenomenology
In the previous two sections, phenomenological models were introduced as counterparts to structural and explanatory modeling approaches. In both cases, the phenomenological models had the character of ‘simpler approaches’. This is an accurate description if ‘simple’ means less complex and easier to handle in numerical environments. However, it should by no means be seen as a synonym for ‘worse’ or ‘inferior’. The mechanical description of materials is not possible at all without the concept of phenomenology. This section therefore gives a brief overview of the strength (and omnipresence) of phenomenology.
As a start we look at the general definition of the term phenomenology given by Smith (2018):
The Oxford English Dictionary presents the following definition: ‘Phenomenology. a. The science of phenomena as distinct from being (ontology). b. That division of any science which describes and classifies its phenomena. From the Greek phainomenon, appearance.’ In philosophy, the term is used in the first sense, amid debates of theory and methodology. In physics and philosophy of science, the term is used in the second sense, albeit only occasionally. (Smith 2018)
In particular, the first (‘a.’) meaning shows that a detailed study of the concept of phenomenology would take us far into the realm of philosophy. Beyond the use of the term in physics and mechanics, phenomenology actually represents a complete disciplinary field in philosophy. It is especially linked to the name of Edmund Husserl.Footnote 3 For our purposes, however, the term phenomena (hence, appearance) mentioned in the definition is particularly interesting and—unsurprisingly—represents the central notion and stands in the middle of the concept of phenomenology, see also Bogen and Woodward (1988) and Bogen (2011). Further, the notion of phenomena is equally important in modern continuum mechanics, as stated by Truesdell and Noll (2004) in their famous magnum opus:
The task of the theorist is to bring order into the chaos of the phenomena of nature, to invent a language by which a class of these phenomena can be described efficiently and simply. (Truesdell and Noll 2004)
Summarizing, the observation of a phenomena has to be the starting point for a phenomenological approach. In a mechanical problem, e.g., such a phenomenon can be an experimentally measured stress-strain curve (hence, an observed material behavior). Then, for the basic problem of material theory, which is finding appropriate constitutive formulations, this means that the description of the phenomenon ‘stress-strain curve’ by means of suitable mathematical functions is a proper phenomenological approach. As a consequence, such an approach cannot be incorrect or insufficient. A phenomenological approach guarantees an unbiased and objective view on the things as they are, it does not require any further subjective opinion of the observer and thus avoids incorrect modeling. It can be said that a phenomenological model does not directly describe a material, but an observed behavior of that material. In this context, it is also irrelevant why the material behavior shows itself in this way. That is also emphasized by Smith and Smith (1995) who stated:
Phenomenology [\(\ldots \)] is above all a descriptive enterprise, a theory of appearances, of symptoms, as contrasted with those disciplines which deal in causal explanation, and with what lies behind the appearances. (Smith and Smith 1995)
Hence, a phenomenological description does not aim to explain why phenomena appear the way they appear. However, this can be seen as an advantage, if it is made clear that such explanations are not only not the aim but also not necessary at all. Moreover, the term ‘symptom’ in the last quote is interesting, too. To illustrate this with an example from medicine: One starts by examining a patient and describing an observed symptom, and not by describing a disease. Applied to mechanical problems, one starts with an observed material behavior and formulates a model based on it, and not vice versa. This way of thinking is crucial in finding the best possible models.
If one wants to find the underlying causes of a particular phenomenon, Machamer et al. (2000) states that ‘Mechanisms are sought to explain how a phenomenon comes about or how some significant process works’. Without going into the philosophical controversies surrounding the exact definition of what a mechanism is, we here adopt the pragmatic definition of Illari and Williamson (2012):
A mechanism for a phenomenon consists of entities and activities organized in such a way that they are responsible for the phenomenon. (Illari and Williamson 2012)
Looking at this from a mechanical point of view, the term ‘entities and activities’ immediately brings to mind the classical multiscale problem with its different interacting components on smaller scales. This connection becomes even clearer by looking at Table 1, which is adopted from Darden (2006, 2008). Although not directly related to mechanical problems, this list could be used for exactly those. An observed phenomenon appears as the result of the spatial and temporal interaction of certain structures (components) on smaller scales. These considerations make it clear, of course, that the investigation of structures on smaller scales is in turn based on the observation of certain phenomena and their necessary description on these scales. At a certain point one will always fall back on phenomenological descriptions in mechanical considerations. Even if a multiscale, explanatory model describes a macroscopic phenomenon in a very detailed manner and incorporates effects from smaller scales, e.g., on the order of micrometers or even nanometers, it is in a physical sense still ‘macroscopic’ and relies on phenomenological concepts like pressure, volume, temperature, heat, work and mass. The designation ‘non-phenomenological’ for a model would therefore be somewhat doubtful. Consequently, the designation of a model as phenomenological or explanatory only makes sense in relation to a certain phenomenon (an observed material behavior) at a certain scale and not to a material with all its appearances across scales.
5 An Exemplary ‘Symptom-Based’ Modeling Workflow
If we now summarize some of the investigations and explanations presented so far, the following questions can be formulated for the creation and setup of models:
Questions for model setup (e.g., in clinical applications)
-
What is the purpose of the model?
-
What phenomenon shall be reproduced/described?
-
What is the observation scale?
-
What is the desired data output?
-
Is the aim to merely reproduce/perform real experiments in-silico or to gain further knowledge and insights from the model?
-
-
What data can be used as input?
-
On which scales is input data available?
-
How reliable and representative is the input data?
-
Must/can further experiments be performed for data acquisition?
-
Sequentially answering those questions and processing the requirements list will lead to the model that fits best. This can be any kind of model, such as a phenomenological model for the pure mathematical description of a stress-stretch curve, or an explanatory (multiscale) model that contains detailed descriptions of smaller scales and that can not only reproduce but also explain macroscopic effects. Yet, it must be stressed that the choice of a particular model is a direct consequence of the problem and the available data. One tries to present a clearly formulated phenomenon or to solve a specific problem by first looking at a ‘symptom’ and then formulates the appropriate model based on this. The quality of the model is not assessed by its complexity or its ability to explain underlying mechanisms, but by the ability to provide the desired output data. Thus, none of the different model approaches can a priori be regarded as better or worse. In particular, we emphasize that explanatory multiscale models are not better than phenomenological (single-scale) approaches by definition. The former demand for considerable effort in the modeling process, such as the need for reliable upscaling and homogenization methods, and usually increase the complexity of the resulting models. In turn, the higher complexity eventually entails higher computational costs when solving actual problems. Further, it always has to be reminded that modeling on more than one scale plus capturing interscale effects usually results in the need of more modeling assumptions. While a single-scale approach smears all small-scale effects and we might thus say that it accounts for them in an intrinsic manner, a multiscale approach actually has to resolve small-scale effects and requires more information and more knowledge about a system. In any case, one should always keep in mind the paradigm as simple as possible, but not simplerFootnote 4 during the formulation of a specific model in order to avoid unnecessary complexity and computational costs.
6 Example I: Collagen Fiber Modeling
In order to clarify the previous considerations, we will now look in this first example at the modeling of collagen fibers. In this connection, collagenous structures can be found in nearly every biological tissue, such as arteries or muscles, and represent a key contributor to their mechanical properties. If a collagen fiber (or a bundle of collagen fibers) is subjected to a tensile stretch, say \(\lambda \), in its longitudinal direction, a typical J-like stress-stretch curve can be observed. For instance, the nominal stress that was measured in experiments by Hansen et al. (2002) is shown in Fig. 4, indicated as \(\mathscr {P}_\text {exp}\). This means that the material behavior of a collagen fiber bundle shows itself as an observed phenomenon by means of experimental measurements. We now obtain a phenomenological description by calibrating suitable mathematical functions to the experimental results. It does not matter why the phenomenon appears in this way and no knowledge of the underlying mechanisms is required. For example, in the context of hyperelasticity, the exponential strain-energy function by Holzapfel et al. (2000), given by \(\mathscr {W}_\mathrm {HGO}(\lambda )=k_1\exp \{k_2\langle \lambda ^2-1\rangle ^2-1\}/(2k_2)\), as well as the formulation by Balzani et al. (2006), given by \(\mathscr {W}_\mathrm {BNSH}(\lambda )=\alpha _1\langle \lambda ^2-1\rangle ^{\alpha _2}\), are particularly useful. Therein, \(\langle x\rangle =(x+|x|)/2\) and each of these two energy functions contains two fitting parameters: \(k_1\) and \(k_2\) for \(\mathscr {W}_\mathrm {HGO}\) and \(\alpha _1\) and \(\alpha _2\) for \(\mathscr {W}_\mathrm {BNSH}\). The calibration of the corresponding nominal stress formulations \(\mathscr {P}_\mathrm {HGO}=\partial _\lambda \mathscr {W}_\mathrm {HGO}\) and \(\mathscr {P}_\mathrm {BNSH}=\partial _\lambda \mathscr {W}_\mathrm {BNSH}\) to the experimental results \(\mathscr {P}_\mathrm {exp}\) provides the curves as shown in Fig. 4 (left). From this it can be seen that both energy functions are very well suited for the phenomenological description of the experimental results. They can be easily integrated into numerical simulation tools.

Modeling of collagen fiber bundles. Experimental stress-stretch data, \(\mathscr {P}_\mathrm {exp}\), from Hansen et al. (2002). Left: best-fit curves for \(\mathscr {P}_{\mathrm {HGO}}\) (\(k_1=9.058\,\text {MPa}\), \(k_2=151.2\), \(R^2=0.9787\)) and \(\mathscr {P}_{\mathrm {BNSH}}\) (\(\alpha _1=1.489\,\text {GPa}\), \(\alpha _2=4.171\), \(R^2=0.9971\)). Right: results \(\mathscr {P}_{\mathrm {MW},1}\) and \(\mathscr {P}_{\mathrm {MW},2}\) from the multiscale model by Marino and Wriggers (2017)
A phenomenological modeling approach has no intention to explain why the experimental stress-stretch curve looks as it does and what mechanisms are responsible for it. In fact: it cannot, does not want to and does not have to explain it. In contrast, an explanatory model aims to identify the mechanisms and components that are responsible for the observed material behavior. A look into the microstructure of collagen fibers helps here. Starting on the smallest (considered) length scale, collagen fibers consist of triple helical tropocollagen molecules with a diameter of about 1.5 nm. Multiple molecules are arranged in staggered arrays and form collagen fibrils with diameters of about 50–250 nm. The molecules interact on the fibril-level through intermolecular covalent cross-links (between two molecules) and so-called weak bonds. Finally, bundles of densely packed fibrils form the collagen fiber, which usually appears in a crimped form in the unloaded reference configuration. This crimped shape has a major influence on the observed J-shaped stress-stretch curve with its flat toe region at lower stretches (when the fiber and underlying structures are crimped) and a stiffening at higher stretches (when the fiber is straightened). More details can be found, e.g., in the textbook of Fratzl (2008). Explanatory models that include these mechanisms across several length scales and provide the resulting macroscopic material response were formulated by, e.g., Buehler (2008), Maceri et al. (2010) and Marino and Wriggers (2017). Results of the latter are shown in Fig. 4 (right). A multiscale model such as the one by Marino and Wriggers (2017) involves microstructural components directly and is usually based on model parameters with direct physical meaning (i.e., no fitting parameters). Of course, this can be very advantageous in biomechanical applications, since it allows, e.g., to describe the material behavior due to microstructural changes caused by diseases. In this context, Craver (2006) commented that explanatory models ‘[\(\ldots \)]show how the system would behave under a wider range of interventions than do phenomenal models, and so they can be used to answer more w-questions’, whereby the term ‘w-questions’ refers to the work of Woodward (2003) and means ‘what-if-things-had-been-different’. In contrast, Craver (2006) states that a phenomenological model is ‘a model that is useful only within a narrow range of conditions (such as health, proper functioning, or the absence of disturbing outside forces) but that fails outside of those narrow conditions’. Hence, a more complex multiscale model can also be applied to scenarios for which no macroscopic experiments exist. However, this complexity is usually associated with additional numerical effort. In the example dealt with here, it could be seen that both phenomenological and explanatory models describe the observed collagen behavior very well and that the choice between these two approaches must depend on the application and the availability of experimental data.
7 Example II: Skeletal Muscle Modeling
The second example deals with skeletal muscle modeling and will be discussed here only briefly. While only uniaxial deformations are usually observed and described for the collagen fibers considered in the previous section, a multi-axial deformation state (that can be expressed by the deformation gradient \(\boldsymbol{F}\)) and the resulting observation of anisotropic material behavior is of interest when examining muscle tissue. This means that the anisotropic behavior results directly from the observation of experiments. In the context of hyperelastic continuum mechanics, this leads to the identification of the material symmetry group \(\mathcal {MG}\subseteq \mathcal {O}(3)\) under which the strain energy \(\mathscr {W}(\boldsymbol{FQ}^T)=\mathscr {W}(\boldsymbol{F})\) becomes invariant with respect to referential transformations \(\boldsymbol{Q}\in \mathcal {MG}\), see also Holzapfel (2000). Thus, a sufficient number of multi-axial experiments is essential, not only for the identification of \(\mathcal {MG}\), but also for the subsequent calibration of strain-energy functions \(\mathscr {W}(\boldsymbol{F})\). In skeletal muscle modeling, however, the presence of muscle fibers in the tissue often resulted in the assumption that \(\mathcal {MG}\) represents the transverse isotropy group and that the material is stiffest in the direction of the muscle fiber. This led to the use of strain-energy functions for fiber-reinforced materials, but beyond that, these were often only fitted to uniaxial experimental data. Experiments such as the one by Takaza et al. (2013) show, however, that muscle can be stiffer in the transverse-to-the-fiber direction and the fiber-reinforced model therefore provides a false statement. Yet, this is not a weakness of a supposedly phenomenological model, because the procedure is simply not observation-based. Rather, it represents an incorrect explanatory approach with a wrong how-possibly assumption. Either one rigorously formulates a phenomenological model based on observations (experimental data) or one postulates mechanisms in a how-possibly model and clearly names it as such.

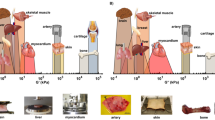
A multiscale framework for the modeling of skeletal muscle tissue. Relevant microstructural constituents, like the extracellular matrix (ECM), are collected in a representative volume element (\(\mathscr {R}\mathscr {V}\mathscr {E}\)) and determine the effective behavior at a macroscopic material point \(\bar{\mathcal {P}}\)
Finally, a last point is illustrated by means of the multiscale muscle model by Bleiler et al. (2019). This model is based on the description of microstructural components, such as the extracellular matrix and the helical arrangement of collagen fibers, and provides the macroscopic behavior of muscle tissue by suitable homogenization and upscaling steps, see Fig. 5. There one can see that the collagen fibers appear on the microscale in this observation and that their description and inclusion are decisive for the prediction of the macroscopic muscle behavior. In turn, the description of the collagen fibers brings us back to the considerations of the previous section. Thus, even in an explanatory multiscale model, the question arises whether individual structures should (or have to) be described on smaller scales by phenomenological or structural/explanatory models. The designation of an explanatory model therefore only makes sense with a clear reference to a certain scale, whereas the description of individual mechanisms in such a model naturally relies again on phenomenological approaches. Hence, the idea of phenomenology is always there.
8 Conclusion
This chapter dealt with the classification of (bio)mechanical models. In particular, two different ways of approaching this topic were discussed. The first was a more classical engineering-oriented approach and focused on the model itself, thus resulting in common descriptions like structural, micromechanical or multiscale. In contrast, the second approach was more application-oriented. It focused on an observed phenomenon and the distinction between direct, phenomenological model approaches and such that explain (or postulate) the underlying mechanisms of a phenomenon. Further, an attempt was made to clarify the meaning and importance of phenomenology in mechanics and to avoid the designation of phenomenological models as inaccurate or insufficient. In mechanics, phenomenological and explanatory approaches represent two different ways of describing observed (material) behavior and neither is better or worse per se. The focus in basic research is usually on the detailed investigation of complex processes across length and time scales, thus leading to detailed multiscale models, while in real (e.g., clinical) applications one might be more interested in the fast and reliable generation of desired output data for given input data, for which phenomenological models are well suited. In this context, analytical microstructurally-motivated constitutive models such as the ones proposed by Professor Holzapfel are particularly valuable, as they combine the advantages of simple usability and the presence of microstructural parameters with physical meaning. Examples are for instance the widely used model by Gasser et al. (2006) for dispersed collagen fiber orientations as well as the constitutive models for arteries proposed by Holzapfel and Ogden (2010) and for cardiac muscle tissue by Holzapfel and Ogden (2009). The latter model, e.g., has made decisive steps towards clinical applications in the context of the Living Heart Project, see, e.g., Baillargeon et al. (2014) and Peirlinck et al. (2021).
In the context of classifying models, it makes sense to refer to (bio)mechanical models in basic research by means of terms like structural or micromechanical, particularly if the model itself is the focus of a work. However, if one is more concerned with answering specific questions (like describing some measured material behavior), such terms are often not helpful, especially in an interdisciplinary environment. In this case, it is sensible to name models according to their abilities in relation to that specific question and to use terms like explanatory or the mentioned distinction between how-possibly- and how-actually-models.
Notes
- 1.
In the continuum-mechanical context, the term ‘model’ usually refers to a constitutive material model that complements the physical balance equations and enables the calculation of initial-boundary-value problems. However, the following considerations on models are not limited to the field of continuum (bio)mechanics and can be conceived in a more general way. The underlying ideas apply equally, for instance, to zero-dimensional models in the field of (mechano)biology.
- 2.
Although the characteristic length scale of inhomogeneities and constituents in a lot of applications is in fact in the order of micrometers (\(\mu \)m), the prefixes micro and macro do not imply a direct connection to absolute sizes, but rather stand for small and large by referring to their Greek roots mikrós and makrós, respectively. The microscale can therefore be as well in the range of, e.g., nanometers without the necessity to refer to it as nanoscale.
- 3.
Edmund Husserl (1859–1938) was an Austrian-German philosopher and mathematician. Interestingly, both the well-known philosopher Franz Brentano and the mathematician Karl Weierstraß were among his academic teachers. Husserl’s work and contributions are essential in establishing phenomenology as an independent philosophical school. Main parts of his research work were published as a complete edition named Husserliana. See, e.g., Husserl (1999) for an English translation of one of his works.
- 4.
This saying—in this or similar forms—is often attributed to Albert Einstein, but that cannot be clearly proven. However, it is assumed that it is a highly simplified version of his verified statement ‘It can scarcely be denied that the supreme goal of all theory is to make the irreducible basic elements as simple and as few as possible without having to surrender the adequate representation of a single datum of experience.’ from his work Einstein (1934). It is, for a continuum-mechanist, interesting to note that in the same work Einstein also formulated a brief justification for continuum field theories: ‘[\(\ldots \)]in a continuum theory, the atomistic character could be satisfactorily expressed by integral propositions without localizing the particles which constitute the atomistic system.’.
References
Baillargeon, B., Rebelo, N., Fox, D.D., Taylor, R.L., Kuhl, E.: The living heart project: a robust and integrative simulator for human heart function. Eur. J. Mech. A-Solid 48, 38–47 (2014)
Balzani, D., Neff, P., Schröder, J., Holzapfel, G.A.: A polyconvex framework for soft biological tissues. Adjustment to experimental data. Int. J. Solids Struct. 43, 6052–6070 (2006)
Bleiler, C., Wagner, A., Stadelmann, V.A., Windolf, M., Köstler, H., Boger, A., Gueorguiev-Rüegg, B., Ehlers, W., Röhrle, O.: Multiphasic modelling of bone-cement injection into vertebral cancellous bone. Int. J. Numer. Meth. Bio. 31(1), 37–57 (2015)
Bleiler, C., Ponte Castañeda, P., Röhrle, O.: A microstructurally-based, multi-scale, continuum-mechanical model for the passive behaviour of skeletal muscle tissue. J. Mech. Behav. Biomed. 97, 171–186 (2019)
Bleiler, C., Ponte Castañeda, P., Röhrle, O.: Tangent second-order homogenisation estimates for incompressible hyperelastic composites with fibrous microstructures and anisotropic phases. J. Mech. Phys. Solids 147, 104251 (2021)
Bogen, J.: ‘Saving the phenomena’ and saving the phenomena. Synthese 182, 7–22 (2011)
Bogen, J., Woodward, J.: Saving the phenomena. Philos. Rev. 97, 303–352 (1988)
Bokulich, A.: How scientific models can explain. Synthese 180, 33–45 (2011)
Buehler, M.J.: Nanomechanics of collagen fibrils under varying cross-link densities: atomistic and continuum studies. J. Mech. Behav. Biomed. 1, 59–67 (2008)
Craver, C.F.: When mechanistic models explain. Synthese 153, 355–376 (2006)
Craver, C.F., Kaplan, D.M.: Are more details better? On the norms of completeness for mechanistic explanations. Brit. J. Philos. Sci. 71, 287–319 (2020)
Darden, L.: Reasoning in Biological Discoveries Essays on Mechanisms, Interfield Relations, and Anomaly Resolution, 4th edn. Cambridge University Press, Cambridge (2006)
Darden, L.: Thinking again about biological mechanisms. Philos. Sci. 75, 958–969 (2008)
Einstein, A.: On the method of theoretical physics. Philos. Sci. 1, 163–169 (1934)
Fratzl, P.: Collagen: Structure and Mechanics. Springer, New York (2008)
Frigg, R., Hartmann, S.: Models in Science. In: Zalta, E.N. (ed.) The Stanford Encyclopedia of Philosophy, spring, 2020th edn. Metaphysics Research Lab, Stanford University (2020)
Gasser, T.C., Ogden, R.W., Holzapfel, G.A.: Hyperelastic modelling of arterial layers with distributed collagen fibre orientations. J. Roy. Soc. Interface 3, 15–35 (2006)
Hansen, K.A., Weiss, J.A., Barton, J.K.: Recruitment of tendon crimp with applied tensile strain. J. Biomech. Eng. 124, 72–77 (2002)
Heidlauf, T., Klotz, T., Rode, C., Altan, E., Bleiler, C., Siebert, T., Röhrle, O.: A multi-scale continuum model of skeletal muscle mechanics predicting force enhancement based on actin-titin interaction. Biomech. Model. Mechanobiol. 15, 1423–1437 (2016)
Holzapfel, G.A.: Nonlinear Solid Mechanics. A Continuum Approach for Engineering. Wiley, Chichester (2000)
Holzapfel, G.A., Ogden, R.W.: Constitutive modelling of passive myocardium: a structurally based framework for material characterization. Philos. T. R. Soc. A 367, 3445–3475 (2009)
Holzapfel, G.A., Ogden, R.W.: Constitutive modelling of arteries. P. Roy. Soc. A 466, 1551–1597 (2010)
Holzapfel, G.A., Gasser, T.C., Ogden, R.W.: A new constitutive framework for arterial wall mechanics and a comparative study of material models. J. Elasticity 61, 1–48 (2000)
Husserl, E.: The Idea of Phenomenology. A Translation of Die Idee der Phänomenologie Husserliana II. Springer, Dordrecht (1999)
Illari, P.M., Williamson, J.: What is a mechanism? Thinking about mechanisms across the sciences. Eur. J. Philos. Sci. 2, 119–135 (2012)
Maceri, F., Marino, M., Vairo, G.: A unified multiscale mechanical model for soft collagenous tissues with regular fiber arrangement. J. Biomech. 43, 355–363 (2010)
Machamer, P., Darden, L., Craver, C.F.: Thinking about mechanisms. Philos. Sci. 67, 1–25 (2000)
Marino, M., Wriggers, P.: Finite strain response of crimped fibers under uniaxial traction: an analytical approach applied to collagen. J. Mech. Phys. Solids 98, 429–453 (2017)
McMullin, E.: What do physical models tell us? In: Van Rootselaar, B., Staal, J.F. (eds.) Logic, Methodology and Philosophy of Science III, Studies in Logic and the Foundations of Mathematics, vol. 52, pp. 385–396. North-Holland Publishing Company, Amsterdam (1968)
Peirlinck, M., Sahli Costabal, F., Yao, J., Guccione, J.M., Tripathy, S., Wang, Y., Ozturk, D., Segars, P., Morrison, T.M., Levine, S., Kuhl, E.: Precision medicine in human heart modeling. Biomech. Model, Mechanobiol (2021)
Röhrle, O., Davidson, J.B., Pullan, A.J.: Bridging scales: a three-dimensional electromechanical finite element model of skeletal muscle. SIAM J. Sci. Comput. 30(6), 2882–2904 (2008)
Röhrle, O., Davidson, J.B., Pullan, A.J.: A physiologically based, multi-scale model of skeletal muscle structure and function. Front. Physiol. 3(358) (2012)
Röhrle, O., Yavuz, U.Ş., Klotz, T., Negro, F., Heidlauf, T.: Multiscale modeling of the neuromuscular system: coupling neurophysiology and skeletal muscle mechanics. Wires. Syst. Biol. Med. 11(6) (2019)
Schmid, L., Klotz, T., Siebert, T., Röhrle, O.: Characterization of electromechanical delay based on a biophysical multi-scale skeletal muscle model. Front. Physiol. 10, 1270 (2019)
Smith, B., Smith, D.W.: Introduction. In: Barry, S., Smith, D.W. (eds.) The Cambridge Companion to Husserl, pp. 1–44. Cambridge University Press (1995)
Smith, D.W.: Phenomenology. In: Zalta, E.N. (ed.) The Stanford Encyclopedia of Philosophy, summer, 2018th edn. Metaphysics Research Lab, Stanford University (2018)
Takaza, M., Moerman, K.M., Gindre, J., Lyons, G., Simms, C.K.: The anisotropic mechanical behaviour of passive skeletal muscle tissue subjected to large tensile strain. J. Mech. Behav. Biomed. 17, 209–220 (2013)
Truesdell, C., Noll, W.: The Non-Linear Field Theories of Mechanics, 3rd edn. Springer, Berlin, Heidelberg (2004)
Wang, Y.K., Nash, M.P., Pullan, A.J., Kieser, J.A., Röhrle, O.: Model-based identification of motion sensor placement for tracking retraction and elongation of the tongue. Biomech. Model. Mechanobiol. 12(2), 383–399 (2013)
Woo, S.L.Y., Johnson, G.A., Smith, B.A.: Mathematical modeling of ligaments and tendons. J. Biomech. Eng. 115, 486–473 (1993)
Woodward, J.: Making Things Happen: A Theory of Causal Explanation. Oxford University Press, New York (2003)
Acknowledgements
This research was partially funded by the Deutsche Forschungsgemeinschaft (DFG, German Research Foundation) under Germany’s Excellence Strategy—EXC 2075-390740016 and by the Federal Ministry of Education and Research—BMBF as part of the project ‘3DFoot’ (funding number: 01EC1907B)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2022 The Author(s), under exclusive license to Springer Nature Switzerland AG
About this chapter

Cite this chapter
Bleiler, C., Röhrle, O. (2022). Classification of Biomechanical Models: The Wrong Battle Between Phenomenological and Structural Approaches, the Partly Underestimated Strength of Phenomenology and Challenges for Future (Clinical) Applications. In: Sommer, G., Li, K., Haspinger, D.C., Ogden, R.W. (eds) Solid (Bio)mechanics: Challenges of the Next Decade. Studies in Mechanobiology, Tissue Engineering and Biomaterials, vol 24. Springer, Cham. https://doi.org/10.1007/978-3-030-92339-6_14
Download citation
DOI: https://doi.org/10.1007/978-3-030-92339-6_14
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-92338-9
Online ISBN: 978-3-030-92339-6
eBook Packages: EngineeringEngineering (R0)