
Abstract
In this paper we derive new explicit two-stage peer methods for the numerical solution of ordinary differential equations by using the technique introduced in [2] for Runge-Kutta methods. This technique allows to re-determine the order conditions of classical methods, obtaining new coefficients values. The coefficients of new methods are no longer constant, but depend on the Jacobian function of the ordinary differential equation. The new methods preserve the order of classical peer methods, and are more accurate and with better stability properties. Numerical tests highlight the advantage of new methods especially for stiff problems.
The authors Conte, Pagano and Paternoster are members of the GNCS group. This work is supported by GNCS-INDAM project and by PRIN2017-MIUR project.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
Peer methods are two-step s-stage methods for the numerical solution of Ordinary Differential Equations (ODEs)
After the work of R. Weiner et al. [1], much more research has been conducted on peer methods, since based on the choice of their coefficients you can obtain explicit parallelizable methods [7,8,9,10], simply explicit methods [11,12,13,14,15,16] or implicit methods [17,18,19,20,21]. It is also possible to use particular techniques, such as the Exponential Fitting (EF) [6], obtaining peer methods adapted to the problem [22,23,24], as they follow the apriori known trend of the real solution.
In this paper we focus on solving the problem (1), and we derive the coefficients of the peer methods in a different way, using the approach that was applied on explicit two- and three-stage Runge-Kutta methods in [2]. Subsequently, the same technique was also applied by other authors on explicit four-stage Runge-Kutta methods [4]. In all these cases, for particular choices of the coefficients, A-stable versions of the methods are obtained, with accuracy order that increases by one compared to the standard case. In the paper [3], specific numerical tests have been carried out in order to confirm these theoretical observations.
We consider explicit peer methods of the form
where the stages are \(Y_{n,i} \approx y(t_{n,i})\), with \(t_{n,i}=t_n+h \,c_i\), and the coefficients matrices are
with R lower triangular matrix.
The coefficients are obtained by modifying the classical order conditions for peer methods, according to the approach proposed in [2], and, as a consequence, they depend on the Jacobian of the function f. This new Jacobian-dependent methods have better stability properties than the classical ones.
The organization of this work is the following: in Sect. 2 we show the classic form of the explicit two-stage peer methods; in Sect. 3 we derive the Jacobian-dependent coefficients of the new two-stage peer methods by imposing different order conditions than the standard case; in Sect. 4 we analyze the linear stability properties of the classic and Jacobian-dependent methods, obtaining for the latter a particular version characterized by a bigger absolute stability region; in Sect. 5 we show numerical tests in order to confirm our theoretical observations; in Sect. 6 we discuss the results and the future research.
2 Classic Peer Methods
Given a discretization {\(t_n\), \(n=1, ..., N\)} of the time interval [\(t_0, T\)] associated to the problem (1), classic explicit two-stage (\(s=2\)) peer methods assume the form
where \(c_1 \in [0,1)\) and \(c_2=1\) (it is convention to use \(c_s=1\) for s-stage peer methods). Remembering that \(Y_{n,i} \approx y(t_{n,i})\), \(t_{n,i}=t_n+h \,c_i\), the solution at the generic grid point \(t_n+h\) is determined by \(Y_{n,2}\), in each time step from \(t_n\) to \(t_{n+1}=t_n+h\).
The classical order conditions of explicit peer methods are obtained by annihilating the necessary number of residuals, defined as
In fact, the following definition applies:
Definition 1
The peer method
is consistent of order p if
To familiarize with the technique we will apply in the next section, in the current section we collect the coefficients of classic explicit two-stage peer methods using it already.
2.1 Two-Stage Classic Version
In this paragraph we impose differently the same order conditions as obtained in [1] in the general case of s stages. In order to derive them, we define the Local Truncation Errors (LTEs) related to the stages as in (9), replacing \(Y_1(t)\) and \(Y_2(t)\) with the continuous functions defined in (10).
The method we analyze in this work is (4), and to have visibility of its free coefficients, we consider them in the following matrices:
There are ten free coefficients, and we’re going to determine some of them by requiring that the accuracy order of the method be equal to two. After that, in Sect. 4, we’ll assign the coefficients left free with the aim of achieving optimal linear stability properties.
Remembering that the stages \(Y_{n,1}\) and \(Y_{n,2}\) determine the numerical solution at the mesh points \(t_n+h\,c_1\) and \(t_n+h\) \((=t_{n+1})\), respectively, we define the linear operators
that are functions by which you can measure the error of (4). In fact, with \(Y_1(t)\) and \(Y_2(t)\) we indicate the continuous expressions of the discrete stages \(Y_{n,1}\) and \(Y_{n,2}\), respectively:
We evaluate \(\underline{L_1}\big (y(t)\big )\) and \(\underline{L_2}\big (y(t)\big )\) for \(y(t)=t^k\), \(k = 0, 1, 2, ...\), but, as explained in [2, 5, 6], for linear operators only the moments (i.e. the expressions of \(\underline{L_i}(t^k)\) corresponding to \(t = 0\)) are of concern. The notation we use to indicate the moments of order k associated with operator \(\underline{L_i}\) is \(L_{i,k}:=\underline{L_i}(t^k)\). Linear operators can be written in a form similar to Taylor series expansion, the terms of which are their respective moments, so the following property holds:
These operators represent the LTEs committed, i.e. a measure to determine how much the solution of the differential Eq. (1) fails to solve the difference Eq. (4).
The complete expression of \(\underline{L_1}(t^k)\) is, combining (9) and (10),
and the moments \(L_{1,0}\), \(L_{1,1}\), \(L_{1,2}\) and \(L_{1,3}\) are
Cancelling the first three moments leads to the following three equations system, which the coefficients of (4) must satisfy so that the accuracy order of the first stage \(Y_{n,1}\) is equal to two:
In fact, from (9) and applying (11) to \(\underline{L_1}(t^k)\), leads to
We indicate the LTE on \(Y_{n,1}\) with \(err_1(t)\), and the Principal term of the Local Truncation Error (PLTE) on \(Y_{n,1}\) with \(t_{err_1}(t)\):
By doing the same on the second stage \(Y_{n,2}\) which, like the first stage \(Y_{n,1}\), we calculate with order of accuracy equal to two, we obtain:
In conclusion, requiring that the global accuracy order of the peer method (4) be equal to two, means deriving the coefficients by solving the systems (14) and (19). Invoking (8), we observe that four free coefficients remain to be assigned later.
The extension of this procedure in the case of s stages is possible and allows to get the coefficients of classical s-stage peer methods with accuracy order \(p=s\). It is customary to assign fixed values to the coefficients of B (respecting \(B 1 = 1 \), with \( 1 =(1,...,1)^T\)), R and c, obtaining (\(a_{ij}\))\(_{i,j=1}^s\) as a function of them [1]:
3 New Jacobian-Dependent Peer Methods
The new Jacobian-dependent methods are obtained by defining differently the functions \(Y_1(t)\) and \(Y_2(t)\) in (10), and therefore the operators (9) with whom we calculate the LTEs from which the stages are affected. In doing so, it will change the definition of \(\underline{L_2}\big (y(t)\big )\), but not that of \(\underline{L_1}\big (y(t)\big )\).
In fact, we are assuming that the following localizing assumption applies only at the previous grid points {\(t_0, ..., t_{n-1}\)}, but not at \(t_n\):
Therefore, we’re going to consider the LTEs committed in the calculation of the previous stages \(Y_{n,j}\), \(j=1,...,i-1\) in determining \(Y_{n,j}\), \(j=i,...,s\). This change leads to the dependence of the coefficients on the Jacobian function of the problem f.
3.1 Two-Stage Jacobian-Dependent Version
As mentioned before, the application of the new hypothesis (22) on peer methods (4) doesn’t produce any changes in \(Y_{n,1}\), as it depends exclusively on \(Y_{n-1,j}\), \(j=1,2\). The only variation concerns \(Y_{n,2}\), because it depends on \(Y_{n,1}\), that is affected by the LTE (16). Therefore, the expression of \(\underline{L_1}(t^k)\) remains the same (12) as in the classic case, as well as the moments (13), the order conditions (14), and the LTE (16).
However, now we need to recalculate the order conditions of the second stage \(Y_{n,2}\), bearing in mind, this time, the error made in the calculation of the first stage \(Y_{n,1}\) (16). The new definition of \(Y_2(t)\) is
where, unlike the definition of \(Y_2(t)\) in (10), there is \(f\big (t+h\,c_1,Y_1(t)\big )\) instead of \(y'(t+h\,c_1)\).
In fact, it now applies that
Remembering that the Taylor series expansion of a generic function g(x) at \(x_0\) is
we get the Taylor series expansion of f in (24) at \(Y_1(t)\) as follows:
By combining (24) and (26), we finally get
The replacement of the expression just found (27) in \(Y_2(t)\) (23) leads to the new shape of \(\underline{L_2}(t^k)\):
The new moments \(L_{2,0}\), \(L_{2,1}\), \(L_{2,2}\) and \(L_{2,3}\) are
where \(m_1(t)=h j_1(t)\). This time we cancel all the four moments, thus obtaining the second stage \(Y_{n,2}\) with accuracy order equal to three. Numerical experiments will show that, despite this, the global accuracy order of the new peer methods remains two:
The resolution of the first three equations in (30) with (14) leads exactly to the same order conditions as the standard methods. Calculating instead the coefficients by solving the systems (30) and (14) in full, we get the new Jacobian-dependent peer methods. Jacobian dependency is evidenced by the presence of \(m_1(t)=h\,j_1(t)\) in the last equation of (30).
Always keeping in mind (8), as there are seven independent equations to be solved now, the number of free coefficients for new peer methods is three and no longer four. By fixing \(b_{11}\), \(b_{21}\) and \(c_1\), the coefficients of new peer methods are shown in (31). We observe that the coefficients \(a_{21}\), \(a_{22}\) and \(r_{21}\) of new methods depend on \(m_1(t)\), i.e. the Jacobian function of the problem at time t. This leads to two important considerations:
-
\(a_{21}\), \(a_{22}\) and \(r_{21}\) must be updated at each time-step;
-
in the multi-dimensional case, \(a_{21}\), \(a_{22}\) and \(r_{21}\) become matrices with the same size as \(m_1(t)\).
4 Linear Stability Analysis
The family of explicit s-stage peer methods can be written in the compact form
In order to perform linear stability analysis of classic peer methods and new Jacobian-dependent peer methods, applying (32) to the test equation \(y'=\lambda y\), \(Re(\lambda )<0\), results in
Therefore, M(z) is the stability matrix of the method, i.e. the numerical method (32) is absolutely stable if \(\rho (M(z)) < 1\), where \(\rho \) is the spectral radius of M(z). The short analysis just shown is detailed in [1].
4.1 Absolute Stability Regions of the New Two-Stage Methods
We have used Mathematica to fix the coefficients left free after the imposition of the order conditions, with the aim of maximizing the size of the absolute stability region of classic and new two-stage peer methods.
Referring to new two-stage Jacobian-dependent peer methods, we need to fix \(b_{11}\), \(b_{21}\) and \(c_1\), then finding the other coefficients of the method by exploiting (31). The exploration range for these parameters is:
-
\(c_1 \in [0,1)\), because the intermediate stages determine the numerical solution within the subinterval \([t_n,t_{n+1}]\),
-
\(b_{11}\) and \(b_{21} \in [-2,2]\), that is usually the range of values in which the coefficients of the matrix B are considered for peer methods.
In doing so, we get the best result with
Trying to do the same thing for classic peer methods as well, using the same intervals for parameter exploration (this time obviously including \(r_{21}\) as well, which is a free parameter for the classic methods), we get the largest real axis of the corresponding absolute stability region by using
Finally, in order to compare the new peer methods with the classical ones, we consider two-stage classic peer method with the same coefficients as the peer Jacobian-dependent (34), fixing the best possible value for \(r_{21}\):
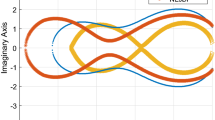
Figure (1) shows the absolute stability regions of Jacobian-dependent and classic methods, using as parameters those just reported.
We note that, although we have fixed the coefficients of the classic peer method (35) in such a way as to maximize the amplitude of the real axis in its stability region, the stability region of the new Jacobian-dependent peer method contains it. In addition, the absolute stability region of the classic method has a rather strange shape, narrowing in some places to just the real axis. The stability region of the classic version with non-optimal coefficients (36) is smaller than that of the other two methods.
5 Numerical Tests
In this section, we conduct numerical tests on two scalar ODEs, by solving them with Jacobian-dependent and classic peer methods, using as coefficient values (34) (for Jacobian-dependent version), (35), and (36) (for classic versions), in order to verify the theoretical properties we derived in the previous sections. Since the exact solution of the following problems is known, we evaluate the absolute error at the last grid point, and the order estimate of the methods using the formula
where cd(h) is the achieved number of correct digits at the endpoint T of the integration interval \([t_0,T]\) with step-size equal to h. For more information on the quantities taken into account for numerical tests consult [3].

5.1 Prothero-Robinson Equation
Let’s solve the Prothero–Robinson scalar equation
in the interval \([0, \pi /2]\), for different values of \(\lambda \). The exact solution of the problem (38) is \(y(t)=sin(t)\). This equation is widely used to test numerical methods as it becomes more and more stiff as \(|\lambda |\) increases.
The results shown in Tables (1), (2), (3), (4), (5) and (6) allow for the following important observations. The Jacobian-dependent method is much more accurate than the classic method with optimal coefficients (35) (there is a difference of two orders of magnitude between their respective absolute errors) and slightly more accurate than the classic method with the same coefficients (36). As the stiffness of the problem increases, it is necessary to use the Jacobian-dependent method, which has better stability properties than the other two, especially the classic peer with the same coefficients. Finally, the global accuracy order estimation of the three methods tends to two, so the classic methods and the new method don’t suffer from order reduction on stiff problems.
Figure (2) confirms the greater accuracy of the Jacobian-dependent method than the other two, for \(\lambda =-50\) and \(\lambda =-100\). In Fig. (3), we represent the trend of the three numerical solutions and the exact one, fixing the problem (i.e. \(\lambda =-10^3\)) and choosing two different values for h. For the first value of h, numerical solutions calculated with the two classical methods explode, and only the Jacobian-dependent method provides a good result. For a smaller value of h, even the classic method with coefficients (35) provides an acceptable solution. Finally, looking at Fig. (4), we can appreciate the fact that when the problem is very stiff (i.e. \(\lambda =-10^4\)), the Jacobian-dependent method becomes more convenient than the others.

Absolute errors as a function of h, for different values of \(\lambda \).

Solution of the problem (38) for different values of h, with \(\lambda =-10^3\).

Solution and absolute errors related to the problem (38), with \(h \approx 10^{-4}\) and \(\lambda =-10^4\).
5.2 Non-linear Scalar Equation
Let’s solve the non-linear scalar equation
in the interval [0, 5]. The exact solution of the problem (39) is \(\displaystyle y(t)=\frac{(2/3)e^{-t}}{1-(2/3)e^{-t}}\).
The results (Tables (7) and (8)) related to the non-linear problem (39) confirm the observations and comments made previously, although in this case the stability advantage of Jacobian-dependent methods is not observed as the equation is non-stiff. The greater accuracy of new methods is confirmed.
6 Conclusions and Future Research
In this paper, we have derived new Jacobian-dependent peer methods with better stability properties than the classic ones. In addition, although we have focused on this new methods, we would like to stress the fact that we have also determined the coefficients of classic explicit peer methods (35) in order to maximize the relative absolute stability region.
Updating the coefficients that depend on the Jacobian function at each step comes at a higher cost. However, this additional cost is acceptable, given the benefits obtained both in terms of stability and accuracy.
The next research will focus on further improving the stability properties of Jacobian-dependent peer methods by investigating the possibility of deriving A-stable methods. Finally, we’ll adapt the methods obtained in this paper to the multi-dimensional case, transforming the coefficients that depend on the Jacobian function into matrices.
References
Weiner, R., Biermann, K., Schmitt, B., Podhaisky, H.: Explicit two-step peer methods. Comput. Math. Appl. 55, 609–619 (2008). https://doi.org/10.1016/j.camwa.2007.04.026
Ixaru, L.: Runge-Kutta methods with equation dependent coefficients. Comput. Phys. Commun. 183, 63–69 (2012). https://doi.org/10.1016/j.cpc.2011.08.017
Conte, D., D’Ambrosio, R., Pagano, G., Paternoster, B.: Jacobian-dependent vs Jacobian-free discretizations for nonlinear differential problems. Comput. Appl. Math. 39(3), 1–12 (2020). https://doi.org/10.1007/s40314-020-01200-z
Fang, Y., Yang, Y., You, X., Wang, B.: A new family of A-stable Runge-Kutta methods with equation-dependent coefficients for stiff problems. Numer. Algorithms 81(4), 1235–1251 (2018). https://doi.org/10.1007/s11075-018-0619-7
Ixaru, L.: Operations on oscillatory functions. Comput. Phys. Commun. 105, 1–19 (1997). https://doi.org/10.1016/S0010-4655(97)00067-2
Ixaru, L., Berghe, G.: Exponential Fitting (2004). https://doi.org/10.1007/978-1-4020-2100-8
Kulikov, G., Weiner, R.: Doubly quasi-consistent parallel explicit peer methods with built-in global error estimation. J. Comput. Appl. Math. 233, 2351–2364 (2010). https://doi.org/10.1016/j.cam.2009.10.020
Schmitt, B., Wiener, R.: Parallel start for explicit parallel two-step peer methods. Numer. Algorithms 53, 363–381 (2010). https://doi.org/10.1007/s11075-009-9267-2
Schmitt, B., Weiner, R., Jebens, S.: Parameter optimization for explicit parallel peer two-step methods. Appl. Numer. Math. 59, 769–782 (2009). https://doi.org/10.1016/j.apnum.2008.03.013
Weiner, R., Kulikov, G.Y., Podhaisky, H.: Variable-stepsize doubly quasi-consistent parallel explicit peer methods with global error control. J. Comput. Appl. Math. 62, 2351–2364 (2012). https://doi.org/10.1016/j.apnum.2012.06.018
Horváth, Z., Podhaisky, H., Weiner, R.: Strong stability preserving explicit peer methods. J. Comput. Appl. Math. 296, 776–788 (2015). https://doi.org/10.1016/j.cam.2015.11.005
Jebens, S., Weiner, R., Podhaisky, H., Schmitt, B.: Explicit multi-step peer methods for special second-order differential equations. Appl. Math. Comput. 202, 803–813 (2008). https://doi.org/10.1016/j.amc.2008.03.025
Klinge, M., Weiner, R.: Strong stability preserving explicit peer methods for discontinuous Galerkin discretizations. J. Sci. Comput. 75(2), 1057–1078 (2017). https://doi.org/10.1007/s10915-017-0573-x
Klinge, M., Weiner, R., Podhaisky, H.: Optimally zero stable explicit peer methods with variable nodes. BIT Numer. Math. 58(2), 331–345 (2017). https://doi.org/10.1007/s10543-017-0691-8
Montijano, J.I., Rández, L., Van Daele, M., Calvo, M.: Functionally fitted explicit two step peer methods. J. Sci. Comput. 64(3), 938–958 (2014). https://doi.org/10.1007/s10915-014-9951-9
Weiner, R., Schmitt, B., Podhaisky, H., Jebens, S.: Superconvergent explicit two-step peer methods. J. Comput. Appl. Math. 223, 753–764 (2009). https://doi.org/10.1016/j.cam.2008.02.014
Jebens, S., Knoth, O., Weiner, R.: Linearly implicit peer methods for the compressible Euler equations. J. Comput. Phys. 230, 4955–4974 (2011). https://doi.org/10.1016/j.jcp.2011.03.015
Kulikov, G.Y., Weiner, R.: Doubly quasi-consistent fixed-stepsize numerical integration of stiff ordinary differential equations with implicit two-step peer methods. J. Comput. Appl. Math. 340, 256–275 (2018). https://doi.org/10.1016/j.cam.2018.02.037
Lang, J., Hundsdorfer, W.: Extrapolation-based implicit-explicit peer methods with optimised stability regions. J. Comput. Phys. 337, 203–215 (2016). https://doi.org/10.1016/j.jcp.2017.02.034
Schneider, M., Lang, J., Hundsdorfer, W.: Extrapolation-based super-convergent implicit-explicit peer methods with A-stable implicit part. J. Comput. Phys. 367, 121–133 (2017). https://doi.org/10.1016/j.jcp.2018.04.006
Schneider, M., Lang, J., Weiner, R.: Super-convergent implicit-explicit Peer methods with variable step sizes. J. Comput. Appl. Math. 387, 112501 (2019). https://doi.org/10.1016/j.cam.2019.112501
Conte, D., D’Ambrosio, R., Moccaldi, M., Paternoster, B.: Adapted explicit two-step peer methods. J. Numer. Math. 27, 69–83 (2018). https://doi.org/10.1515/jnma-2017-0102
Conte, D., Mohammadi, F., Moradi, L., Paternoster, B.: Exponentially fitted two-step peer methods for oscillatory problems. Comput. Appl. Math. 39(3), 1–19 (2020). https://doi.org/10.1007/s40314-020-01202-x
Conte, D., Paternoster, B., Moradi, L., Mohammadi, F.: Construction of exponentially fitted explicit peer methods. Int. J. Circuits 13, 501–506 (2019)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2021 Springer Nature Switzerland AG
About this paper

Cite this paper
Conte, D., Pagano, G., Paternoster, B. (2021). Jacobian-Dependent Two-Stage Peer Method for Ordinary Differential Equations. In: Gervasi, O., et al. Computational Science and Its Applications – ICCSA 2021. ICCSA 2021. Lecture Notes in Computer Science(), vol 12949. Springer, Cham. https://doi.org/10.1007/978-3-030-86653-2_23
Download citation
DOI: https://doi.org/10.1007/978-3-030-86653-2_23
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-86652-5
Online ISBN: 978-3-030-86653-2
eBook Packages: Computer ScienceComputer Science (R0)