
Abstract
Nonlocal gradient mechanics of elastic beams subject to torsion is established by means of a variationally consistent methodology, equipped with suitable functional spaces of test fields. The proposed elasticity theory is the generalization of size-dependent models recently contributed in literature to assess size-effects in nano-structures, such as modified nonlocal strain gradient and strain- and stress-driven local/nonlocal elasticity formulations. General new ideas are elucidated by examining the torsional behavior of elastic nano-beams. Equivalence between nonlocal integral convolutions and differential problems subject to variationally consistent boundary conditions is demonstrated for special averaging kernels. The variational procedure leads to well-posed engineering problems in nano-mechanics. Elasto-static responses and free vibrations of nano-beams under torsion are analyzed applying an effective analytical solution technique. Nonlocal strain- and stress-driven gradient models of elasticity can efficiently predict both stiffening and softening structural responses, and thus, notably characterize small-scale phenomena in structures exploited in modern Nano-Electro-Mechanical-Systems (NEMS).
Access provided by Autonomous University of Puebla. Download chapter PDF
Similar content being viewed by others
1 Introduction
Nano-engineered materials are nowadays widely exploited as fundamental constituents of modern Nano-Electro-Mechanical-Systems (NEMS) due to their outstanding physical features [1,2,3,4,5]. Nano-structures are well-recognized to demonstrate size-dependent mechanical responses at small-scales which cannot be technically modeled by the local elasticity theory. The thematic concerning with the analysis of size-effects in advanced materials and structures has stimulated a great deal of interest in the current literature, such as nonlocal elasticity [6,7,8,9,10,11,12], local/nonlocal mixture [13,14,15], strain gradient elasticity [16,17,18,19], nonlocal strain gradient theory [20,21,22] and variational nonlocal gradient elasticity [23, 24]. Recent review on size-dependent elasticity models can be found in Ref. [25].
Nonlocal constitutive law associated with the strain-driven nonlocal elasticity, originally exploited by Eringen [26], is extensively applied for the investigation of size-effects in nano-structures [27, 28]. Inapplicability of strain-driven nonlocal integral elasticity to nano-beams of technical interest, involving bounded structural domains has been discussed and acknowledged in the recent literature [29]. On the contrary, the stress-driven nonlocal elasticity, conceived in [30], leads to mathematically well-posed nonlocal problems. Pure and two-phase stress-driven nonlocal models have been effectively utilized to capture size-effects in nano-structures subject to both static and dynamic phenomena, see e.g. [31, 32]. Nonlocal strain gradient model [33, 34] is also widely utilized to tackle small-scale effects in nano-continua while employing unnecessary higher-order boundary conditions. There is, however, a dispute in the literature on the suitable choice of non-standard boundary conditions required to close the nonlocal strain gradient problem [20, 21, 35, 36]. The constitutive boundary conditions, naturally stemmed from the nonlocal integral constitutive law, have been recently addressed in the framework of modified nonlocal strain gradient elasticity [35]. The consistent variational scheme, with suitably selected functional spaces describing test fields, is lately conceived for nonlocal gradient inflected beams [36]. The well-posed strain- and stress-driven approaches of nonlocal gradient elasticity are able to efficiently demonstrate both softening and stiffening nonlocal responses in the flexure of elastic nano-beams [23, 36].
In view of the importance of examining scale phenomena in torsional elements of modern NEMS, the motivation of the present chapter is to generalize the variational nonlocal gradient approach to the torsion of elastic nano-beams. The outline of the present chapter is as follows. Preliminary notions of kinematics and equilibrium of elastic beams under torsion are briefly recalled in Sect. 2. Nonlocal strain- and stress-driven gradient formulations of elasticity for torsion of nano-beams are developed in Sect. 3. Section 4 is devoted to the elasto-static and -dynamic analysis of the torsional behavior of nano-beams where numerical results are also provided and commented upon. Concluding remarks are drawn in Sect. 5.
2 Local Elastic Beams
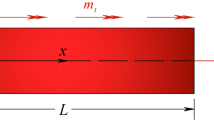
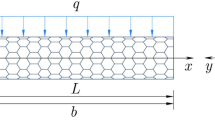
A straight beam of length L subject to torsion, with circular cross-section \(\Xi \), is considered. The abscissa x is taken along the beam axis, orthogonal to the cross-sectional plane including the axes y and z. Motivated by the Saint-Venant’s problem solution [37, 38], the displacement field \(\mathbf {u}\) of the beam, up to an inessential additional rigid body motion, writes as
with \(\theta :\left[ 0,L \right] \mapsto \mathfrak {R}\) torsional cross-sectional rotation function. The tensor \(\mathbf {R}\) is the rotation by \(\pi /2\) counter clock-wise in \(\Xi \) and position vector of a cross-sectional point with respect to the centroid is represented by \(\mathbf {r}=\left( y,z \right) \). The shear strain vector \(\varvec{\gamma }=\left( {{\gamma }_{yx}},{{\gamma }_{zx}} \right) \), kinematically compatible with the displacement field \(\mathbf {u}\), is detected as
with the geometric torsional curvature \(\chi :\left[ 0,L \right] \mapsto \mathfrak {R}\) being the first derivative of the torsional rotation along the axial abscissa x. Furthermore, introducing the mass polar moment of inertia \({J}_{\rho }\) and torsional stiffness \({J}_{G}\) is useful in the formulation of the torsional problem
with \(\rho \) and G material density and shear elastic modulus, respectively. The dot into the integrals stands for inner product between vectors.
The loading system on the beam is assumed to consist of distributed torque per unit length \(m:\left[ 0,L \right] \mapsto \mathfrak {R}\) and concentrated couples \(T_0\) and \(T_L\) at the end cross-sections. The principle of virtual work can be applied to prescribe the dynamic equilibrium condition as
for any virtual torsional rotation field \(\delta \theta :\left[ 0,L \right] \mapsto \mathfrak {R}\) fulfilling homogeneous kinematic boundary conditions. The twisting resultant moment T is defined by
with \(\varvec{\tau }=\left( {{\tau }_{yx}},{{\tau }_{zx}} \right) \) shear stress vector field.
As a result of employing a standard localization procedure based on the integration by parts, differential and standard boundary conditions associated with the variational formulation Eq. (4) are expressed by
3 Nonlocal Gradient Elastic Beams
The nonlocal gradient model introduced in Ref. [36] for elastic inflected nano-beams is extended in this section to formulate nonlocal gradient nano-beams under torsion. A consistent variational formulation for both Nonlocal strain-driven Gradient (NstrainG) and Nonlocal stress-driven Gradient (NstressG) models of elasticity is introduced. The conceived NstrainG and NstressG elasticity theories are shown to result in well-posed nonlocal problems in bounded structural domains of nano-engineering interest.
The definition of integral convolution between a smoothing kernel \({{\varphi }_{c}}\) and a scalar field f is preliminarily recalled for conciseness sake
with x and \(\bar{x} \) being the points of the structural interval \(\left[ 0,L \right] \). The length-scale parameter demonstrating nonlocal effects is denoted by \(c\in \left] 0,\infty \right[\). The smoothing kernel \({{\varphi }_{c}}\) is selected to meet positivity, symmetry, normalization and impulsivity properties [29].
3.1 Nonlocal Strain-Driven Gradient (NstrainG) Elasticity
The abstract formulation of nonlocal gradient beams under torsion consistent with NstrainG is governed by the following elastic energy, \({{\Pi }_{\text {NstrainG}}}\),
with \(\alpha \in \left[ 0,1 \right] \) mixture parameter and  gradient length-scale parameter. The relevant nonlocal gradient twisting moment T is provided by the variational condition
gradient length-scale parameter. The relevant nonlocal gradient twisting moment T is provided by the variational condition
for any virtual torsional curvature field \(\delta \chi \in C_{0}^{1}\left( \left[ 0,L \right] ;\mathfrak {R}\right) \) having compact support in the structural domain. To determine the NstrainG constitutive law defining the twisting moment T in terms of torsional curvature \(\chi \), the directional derivative of the elastic energy \({{\Pi }_{\text {NstrainG}}}\) is evaluated while integrating by parts
The choice of assuming virtual torsional curvature fields to have compact supports leads to vanishing boundary values \({{\left. \delta \chi \right| }_{x=0}}\) and \({{\left. \delta \chi \right| }_{x=L}}\). As a result of implementing a standard localization procedure, the sought nonlocal gradient constitutive law is detected via prescription of the variational condition Eq. (10) as
Helmholtz bi-exponential kernel, fulfilling positivity, symmetry, normalization and impulsivity conditions, is a well-accepted choice for the special smoothing kernel \({{\varphi }_{c}}\)
Following the proposition 3.1 of [36], the NstrainG integro-differential law can be demonstrated to be equivalent to an appropriate differential constitutive problem equipped with suitable constitutive boundary conditions.
Proposition 7.1. Constitutive equivalency for NstrainG
The nonlocal gradient constitutive law Eq. (12), on a bounded structural interval \(\left[ 0,L \right] \), with bi-exponential kernel Eq. (13) for nano-beams subject to torsion is equivalent to the differential constitutive equation
subject to two constitutive boundary conditions (CBCs)
The general formulation of nonlocal gradient elasticity comprises some well-established special models adopted in mechanics of nano-structures. The nonlocal strain gradient constitutive law equipped with suitable CBCs [24] can be recovered via vanishing the mixture parameter \(\alpha \rightarrow 0\) as
The two-phase local/nonlocal strain-driven model and associated CBCs can be also obtained as the gradient characteristic length approaches zero \(\ell \rightarrow 0\) [32]
3.2 Nonlocal Stress-Driven Gradient (NstressG) Elasticity
While the roles of stress and strain fields can be readily swapped in the framework of local elasticity, two distinct nonlocal gradient formulations should be prescribed based on the physical interpretation of source and output elastic fields. NstressG can be introduced by converting the source and output fields of the integral convolution with respect to NstrainG model. Accordingly, the elastic potential of nano-beams under torsion \({{\Pi }_{\text {NstressG}}}\) associated with NstressG is defined by
The torsional curvature \(\chi \) of NstressG is established by the variational constitutive condition
for any virtual twisting moment field \(\delta T\in C_{0}^{1}\left( \left[ 0,L \right] ;\mathfrak {R}\right) \) having compact support in the structural domain. The directional derivative of the elastic potential along a virtual twisting moment can be determined by introducing the expression of \({{\Pi }_{\text {NstressG}}}\) and integrating by parts
The boundary terms in Eq. (20) are disappeared due to assuming virtual test fields to have compact supports in the structural domain. A standard localization procedure then provides the NstressG torsional curvature \(\chi \) in terms of twisting moment T while applying the variational condition Eq. (19)
The equivalent differential constitutive problem with the corresponding new CBCs in the framework of NstressG is similarly determined by assuming the smoothing kernel to be the Helmholtz bi-exponential function.
Proposition 7.2. Constitutive equivalency for NstressG
The nonlocal gradient constitutive relation Eq. (21), endowed with the Helmholtz bi-exponential kernel Eq. (13), is equivalent to the differential constitutive equation
equipped with the constitutive boundary conditions
The stress-driven type formulation of NstressG includes well-known particular elasticity models of nano-mechanics. Setting the gradient characteristic length zero \(\ell \rightarrow 0\), the two-phase local/nonlocal stress-driven model and associated CBCs can be recovered [32]
As expected, the stress-driven purely nonlocal formulation of elastic torsion can be obtained via vanishing the mixture parameter \(\alpha \rightarrow 0\) and the gradient characteristic length \(\ell \rightarrow 0\) as [32]
4 Nonlocal Gradient Nano-Structures Under Torsion
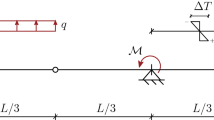
The established variationally consistent nonlocal strain- and stress-driven gradient models of elasticity are exploited in this section to examine size-dependent torsional responses of structural schemes of nano-mechanical interest: cantilever and fully-clamped nano-beams. In elasto-static torsional analysis, a nano-beam of length L is assumed to be subjected to uniformly distributed couples \(\bar{m}\) per unit length. The non-dimensional parameters: axial abscissa \(\bar{x}\), nonlocal characteristic parameter \(\lambda \), gradient characteristic parameter \(\mu \), torsional rotation \(\bar{\theta }\) and fundamental torsional frequency \(\bar{\omega }\) are introduced as
4.1 Elastostatic Torsion
Inertia terms are absent in the elasto-static analysis, and thus, the differential condition of equilibrium Eq. (6) can be integrated to detect the twisting moment T in terms of an integration constant \({{\Lambda }_{1}}\) as
The torsional curvature \(\chi \) is subsequently determined via solving the constitutive differential equation of NstrainG Eq. (14) in terms of integration constants \({{\Lambda }_{2}}\) and \({{\Lambda }_{3}}\)
Similarly, the constitutive differential equation of NstressG Eq. (22) can be solved to determine the torsional curvature field in terms of integration constants \({{\Lambda }_{2}}\) and \({{\Lambda }_{3}}\)
Lastly, the torsional rotation field \(\theta \) can be evaluated integrating the differential condition of kinematic compatibility \(\chi ={{\partial }_{x}}\theta \) in terms of the integration constant \({{\Lambda }_{4}}\) as
The integration constants \({{\Lambda }_{k}}\) (k = 1,...,4) can be detected by prescribing two Constitutive Boundary Conditions of NstrainG Eq. (15) or NstressG Eq. (23), which are independent of the considered boundary kinematic constraints, in addition to two standard kinematic and static boundary conditions (BCs) specialized here for the examined case-studies.
In case of the cantilever nano-beam subject to uniformly distributed couples, the torsional solution field has to fulfill the (standard) classical boundary conditions
The (standard) essential kinematic boundary conditions in case of a fully-clamped nano-beam subject to uniformly distributed couples are also given by
The proposed analytical approach provides exact analytical solutions in consequence of integrating differential equations of lower order. In the sequel, the acronyms LOC, NstrainG and NstressG, respectively, denote the local beam model, nonlocal strain-driven gradient model and nonlocal stress-driven gradient model.
To visibly demonstrate the effects of the gradient characteristic parameter on the torsional responses of cantilever nano-beams, numerical values of torsional rotations are evaluated in the mid-span. The normalized torsional rotations at the mid-span of the cantilever nano-beam associated with NstrainG and NstressG under uniformly distributed couples are exhibited in Figs. 1 and 2.

Cantilever NstrainG nano-beams under uniform couples: normalized mid-span torsional rotation

Cantilever NstressG nano-beams under uniform couples: normalized mid-span torsional rotation

Fully-clamped NstrainG nano-beams under uniform couples: normalized maximum torsional rotation
Likewise, the normalized maximum torsional rotations of fully-clamped nano-beams consistent with NstrainG and NstressG under uniformly distributed couples are illustrated in Figs. 3 and 4. Detected torsional rotation fields are also normalized exploiting the corresponding torsional rotation of the local beam model \({{\bar{\theta }}^{\text {LOC}}}\). In Figs. 1, 2, 3 and 4, while the nonlocal characteristic parameter \(\lambda \) is ranging in the interval \(\left] 0,1 \right[\), the gradient characteristic parameter \(\mu \) is ranging in the set of \(\left\{ 0,0.1,0.3,0.5,0.7,1.0 \right\} \) and two values of the mixture parameter as \(\alpha =0\) and \(\alpha =0.5\) are prescribed. It is deduced from Figs. 1, 2, 3 and 4 that the size-dependent NstrainG model exhibits a softening behavior in terms of nonlocal characteristic parameter \(\lambda \), that is a larger \(\lambda \) involves a larger torsional rotation for given gradient and mixture parameters. The torsional rotation of elastic nano-beams decreases as the gradient or the mixture parameters increase, and accordingly, NstrainG theory demonstrates a stiffening behavior in terms of gradient and mixture parameters for a given value of \(\lambda \). Effects of characteristic parameters are more pronounced in NstrainG beams with fully-clamped ends. On the contrary, a softening response is demonstrated in the framework of NstressG for increasing gradient or mixture parameters and a stiffening behavior is detected for increasing nonlocal characteristic parameter. In the framework of NstressG model, size-dependent elastostatic responses of fully-clamped beams are more affected by characteristic parameters.

Fully-clamped NstressG nano-beams under uniform couples: normalized maximum torsional rotation
As expected, the size-dependent elastic torsional rotation of nano-beams in accordance with either of the NstrainG or NstressG models coincides with the local response for vanishing small-scale characteristic and mixture parameters. Additionally, size-dependent effects of nonlocal and gradient parameters are less noticeable in the presence of non-vanishing mixture parameter \(\alpha \ne 0\). Notably, NstrainG and NstressG theories demonstrate different softening and stiffening structural responses in terms of characteristic parameters due to profound differences in the fundamental assumptions of the models to capture scale phenomena.
4.2 Torsional Free Vibrations
In order to examine torsional free vibrations of nano-beams, the relevant elasto-dynamic problems associated with NstrainG and NstressG are formulated in terms of the torsional rotation field. The distributed couple is allowed to vanish, and consequently, twisting moment field T can be determined by prescribing the differential condition of equilibrium Eq. (6) to the constitutive differential law of NstrainG Eq. (14) or NstressG Eq. (22) as
The differential condition of dynamic equilibrium governing torsional vibrations of nano-beams can be expressed in terms of torsional rotation field by applying kinematic compatibility. Accordingly, the differential condition of dynamic equilibrium consistent with the NstrainG is
and NstressG writes as
equipped with the classical (standard) boundary conditions Eq. (7) and corresponding constitutive boundary conditions associated with NstrainG Eq. (15) or NstressG Eq. (23). A standard procedure of separating spatial and time variables is subsequently employed to study torsional free vibrations
with \(i=\sqrt{-1}\), \(\Theta \) and \(\omega \) denoting the spatial mode shapes and natural frequency of torsional vibrations. Imposing the separation of variables Eq. (36) on the differential conditions of dynamic equilibrium Eqs. (34)–(35), the differential condition of torsional coordinate functions for NstrainG is
and for NstressG is obtained as
The torsional coordinate function can be analytically detected as
where unknown integration constants \({{\Upsilon }_{k}}\) (\(k=1,2,3,4)\) have yet to be determined along with \({{\beta }_{k}}\) (\(k=1,2,3,4)\) being the roots of the characteristic equation associated with the differential equations of Eq. (37) or Eq. (38).
For the NstrainG cantilever nano-beam, a homogeneous fourth-order algebraic system in terms of the unknown integration constants \({{\Upsilon }_{k}}\)( \(k=1,2,3,4)\) is established as a result of imposing (standard) classical BCs Eq. (31) along with CBCs Eq. (15) to the closed form solution of the torsional coordinate function Eq. (39). In the same way, homogeneous fourth-order algebraic systems can be determined for nano-beams associated with either of NstrainG or NstressG models. To detect the non-trivial solution of torsional free vibrations, the system of algebraic equations has to be singular. Accordingly, a highly nonlinear characteristic equation is obtained for nano-beams consistent with either of nonlocal gradient models that is numerically solved.
Fundamental torsional frequencies of cantilever and fully-clamped nano-beams associated with NstrainG and NstressG theories are numerically detected and demonstrated in Figs. 5, 6, 7 and 8. The detected torsional frequencies are also normalized employing their corresponding local natural frequencies \({{\bar{\omega }}_{\text {LOC}}}\). The characteristic and mixture parameters are assumed to have the same ranging set as the elasto-static torsional response exhibited in Figs. 1 through 4.

Normalized torsional fundamental frequency of NstrainG cantilever nano-beams

Normalized torsional fundamental frequency of NstressG cantilever nano-beams

Normalized torsional fundamental frequency of NstrainG fully-clamped nano-beams

Normalized torsional fundamental frequency of NstressG fully-clamped nano-beams
It is inferred from the illustrative results associated with the NstrainG model that the nonlocal characteristic parameter \(\lambda \) has the effect of decreasing the fundamental torsional frequencies, that is a larger \(\lambda \) involves a smaller natural torsional frequency. The natural torsional frequencies consistent with the NstrainG model, therefore, demonstrate a softening structural response in terms of nonlocal characteristic parameter \(\lambda \). Furthermore, the natural frequencies associated with the NstrainG model increase by increasing the gradient characteristic or the mixture parameter, and accordingly, demonstrating a stiffening structural response in terms of gradient and mixture parameters. Conversely, a softening behavior is detected for torsional frequencies consistent with NstressG for increasing gradient or mixture parameters and a stiffening response is demonstrated for increasing nonlocal characteristic parameter. In both NstrainG and NstressG models, the effects of characteristic parameters are more noticeable in nano-beams with fully-clamped ends. For non-vanishing mixture parameter \(\alpha \ne 0\), the fundamental torsional frequency of nano-beams is less affected by the nonlocal and gradient characteristic parameters. Fundamental torsional frequencies of the local elastic beam model can be recovered as the small-scale characteristic and mixture parameters approach zero. NstrainG and NstressG models are founded on different theoretical bases, and thus, exhibit different softening and stiffening structural responses in terms of characteristic parameters.
5 Conclusions
The nonlocal gradient elasticity theory of inflected nano-beams is extended in this chapter to the mechanics of elastic nano-beams under torsion. Size-dependent torsional response of the elastic beams is investigated by making recourse to a consistent variational constitutive formulation equipped with appropriately selected test fields. The convolution integrals of the constitutive law are transformed into equivalent differential conditions subject to non-standard boundary conditions of nonlocal type. A consistent unified theory of nonlocal gradient elasticity is established for the elastic torsion problem comprising both strain- and stress-driven nonlocal approaches. The well-established elasticity theories adopted in the mechanics of nano-structures including purely nonlocal stress-driven model, two-phase local/nonlocal strain- and stress-driven models as well as modified nonlocal strain gradient model are recovered as special cases. The novel NstrainG and NstressG theories of elasticity are applied to advantageously investigate the size-dependent torsional response of structural schemes of nano-technology applications. Elasto-static and -dynamic torsional responses of nano-beams are examined applying an efficient analytical solution procedure. The variational nonlocal gradient theory is demonstrated to lead to mathematically well-posed problems of mechanics of nano-structures, generally defined in bounded domains. The nonlocal strain- and stress-driven gradient models of elasticity can effectively simulate both stiffening and softening structural responses, and accordingly, provide an innovative viable approach for design and optimization of nano-engineered structures exploited in ground-breaking NEMS.
References
Mercan K, Emsen E, Civalek Ö (2019) Effect of silicon dioxide substrate on buckling behavior of Zinc Oxide nanotubes via size-dependent continuum theories. Compos Struct 218:130–141
Duan K, Li L, Wang F, Meng W, Hu Y, Wang X (2019) Importance of Interface in the Coarse-Grained Model of CNT/Epoxy Nanocomposites. Nano Mater 9:1479
Mercan K, Numanoglu HM, Akgöz B, Demir C, Civalek Ö (2017) Higher-order continuum theories for buckling response of silicon carbide nanowires (SiCNWs) on elastic matrix. Arch Appl Mech 87:1797–1814
Duan K, Zhang J, Li L, Hu Y, Zhu W, Wang X (2019) Diamond nanothreads as novel nanofillers for cross-linked epoxy nanocomposites. Compos Sci Technol 174:84–93
Pouresmaeeli S, Fazelzadeh SA, Ghavanloo E, Marzocca P (2018) Uncertainty propagation in vibrational characteristics of functionally graded carbon nanotube-reinforced composite shell panels. Int J Mech Sci 149:549–558
Ghavanloo E, Rafii-Tabar H, Fazelzadeh SA (2019) New insights on nonlocal spherical shell model and its application to free vibration of spherical fullerene molecules. Int J Mech Sci 161–162:105046
Barretta R, Faghidian SA, Marotti de Sciarra F (2019) A consistent variational formulation of Bishop nonlocal rods. Continuum Mech Thermodyn. https://doi.org/10.1007/s00161-019-00843-6
Hache F, Challamel N, Elishakoff I (2019) Asymptotic derivation of nonlocal beam models from two-dimensional nonlocal elasticity. Math Mech Solids 24:2425–2443
Numanoğlu HM, Civalek Ö (2019) On the torsional vibration of nanorods surrounded by elastic matrix via nonlocal FEM. Int J Mech Sci 161–162:105076
Hache F, Challamel N, Elishakoff I (2019) Asymptotic derivation of nonlocal plate models from three-dimensional stress gradient elasticity. Continuum Mech Thermodyn 31:47–70
Tashakorian M, Ghavanloo E, Fazelzadeh SA, Hodges DH (2018) Nonlocal fully intrinsic equations for free vibration of Euler-Bernoulli beams with constitutive boundary conditions. Acta Mech 229:3279–3292
Barretta R, Fazelzadeh SA, Feo L, Ghavanloo E, Luciano R (2018) Nonlocal inflected nano-beams: A stress-driven approach of bi-Helmholtz type. Compos Struct 200:239–245
Tuna M, Kirca M, Trovalusci P (2019) Deformation of atomic models and their equivalent continuum counterparts using Eringen’s two-phase local/nonlocal model. Mech Res Commun 97:26–32
Zhu X, Li L (2017) Longitudinal and torsional vibrations of size-dependent rods via nonlocal integral elasticity. Int J Mech Sci 133:639–650
Fernández-Sáez J, Zaera R (2017) Vibrations of Bernoulli-Euler beams using the two-phase nonlocal elasticity theory. Int J Eng Sci 119:232–248
Barretta R, Faghidian SA, Marotti de Sciarra F (2019) Aifantis versus Lam strain gradient models of Bishop elastic rods. Acta Mech 230:2799–2812
Li L, Hu Y (2019) Torsional statics of two-dimensionally functionally graded microtubes. Mech Adv Mater Struct 26:430–442
Dilena M, Dell’Oste MF, Fernández-Sáez J, Morassi A, Zaera R (2019) Mass detection in nanobeams from bending resonant frequency shifts. Mech Syst Sig Process 116:261–276
Bagheri E, Asghari M, Danesh V (2019) Analytical study of micro-rotating disks with angular acceleration on the basis of the strain gradient elasticity. Acta Mech 230:3259–3278
Zaera R, Serrano Ó, Fernández-Sáez J (2020) Non-standard and constitutive boundary conditions in nonlocal strain gradient elasticity. Meccanica 55:469–479
Zaera R, Serrano Ó, Fernández-Sáez J (2019) On the consistency of the nonlocal strain gradient elasticity. Int J Eng Sci 138:65–81
Barretta R, Faghidian SA, Marotti de Sciarra F, Vaccaro MS (2020) Nonlocal strain gradient torsion of elastic beams: variational formulation and constitutive boundary conditions. Arch Appl Mech 90:691–706
Pinnola FP, Faghidian SA, Barretta R, Marotti de Sciarra F (2020) Variationally consistent dynamics of nonlocal gradient elastic beams. Int J Eng Sci 149:103220
Barretta R, Faghidian SA, Marotti de Sciarra F, Penna R, Pinnola FP (2020) On torsion of nonlocal Lam strain gradient FG elastic beams. Compos Struct 233:111550
Rafii-Tabar H, Ghavanloo E, Fazelzadeh SA (2016) Nonlocal continuum-based modeling of mechanical characteristics of nanoscopic structures. Phys Rep 638:1–97
Eringen A (1983) On differential equations of nonlocal elasticity and solutions of screw dislocation and surface waves. J Appl Phys 54:4703–4710
Ghavanloo E, Rafii-Tabar H, Fazelzadeh SA (2019) Computational continuum mechanics of nanoscopic structures: nonlocal elasticity approaches. Springer
Rafii-Tabar H (2008) Computational physics of carbon nanotubes. Cambridge University Press, Cambridge
Romano G, Luciano R, Barretta R, Diaco M (2018) Nonlocal integral elasticity in nanostructures, mixtures, boundary effects and limit behaviours. Continuum Mech Thermodyn 30:641–655
Romano G, Barretta R (2017) Nonlocal elasticity in nanobeams: the stress-driven integral model. Int J Eng Sci 115:14–27
Barretta R, Caporale A, Faghidian SA, Luciano R, Marotti de Sciarra F, Medaglia CM (2019) A stress-driven local-nonlocal mixture model for Timoshenko nano-beams. Compos Part B 164:590–598
Apuzzo A, Barretta R, Fabbrocino F, Faghidian SA, Luciano R, Marotti de Sciarra F (2019) Axial and torsional free vibrations of elastic nano-beams by stress-driven two-phase elasticity. J Appl Comput Mech 5:402–413
Aifantis EC (2011) On the gradient approach-relation to Eringen’s nonlocal theory. Int J Eng Sci 49:1367–1377
Lim CW, Zhang G, Reddy JN (2015) A higher-order nonlocal elasticity and strain gradient theory and its applications in wave propagation. J Mech Phys Solids 78:298–313
Barretta R, Marotti de Sciarra F (2018) Constitutive boundary conditions for nonlocal strain gradient elastic nano-beams. Int J Eng Sci 130:187–198
Barretta R, Marotti de Sciarra F (2019) Variational nonlocal gradient elasticity for nano-beams. Int J Eng Sci 143:73–91
Romano G, Barretta A, Barretta R (2012) On torsion and shear of Saint-Venant beams. Eur J Mech A-Solid 35:47–60
Faghidian SA (2016) Unified formulation of the stress field of Saint-Venant’s flexure problem for symmetric cross-sections. Int J Mech Sci 111–112:65–72
Acknowledgements
The financial support of the Italian Ministry for University and Research (P.R.I.N. National Grant 2017, Project code 2017J4EAYB; “University of Naples Federico II” Research Unit) is gratefully acknowledged.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2021 The Author(s), under exclusive license to Springer Nature Switzerland AG
About this chapter

Cite this chapter
Pinnola, F.P., Faghidian, S.A., Vaccaro, M.S., Barretta, R., Marotti de Sciarra, F. (2021). Nonlocal Gradient Mechanics of Elastic Beams Under Torsion. In: Ghavanloo, E., Fazelzadeh, S.A., Marotti de Sciarra, F. (eds) Size-Dependent Continuum Mechanics Approaches. Springer Tracts in Mechanical Engineering. Springer, Cham. https://doi.org/10.1007/978-3-030-63050-8_7
Download citation
DOI: https://doi.org/10.1007/978-3-030-63050-8_7
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-63049-2
Online ISBN: 978-3-030-63050-8
eBook Packages: EngineeringEngineering (R0)