
Abstract
As the length scale starts decreasing such that the inner substructure of the material becomes dominant in material response, the well-known theory of elasticity shows inadequacies. As a remedy, generalized mechanics is proposed leading to additional, inner substructure related parameters to be determined. In order to acquire them, for a so-called metamaterial with known substructure and material response in the length scale of the substructure, we present how to apply a computational approach based on the finite element method.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
1 Introduction
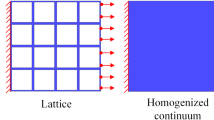
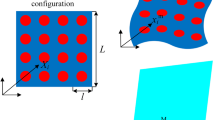
In continuum mechanics, conventional theory of elasticity fails to model structures, where the inner substructure starts affecting the material response. An intuitive explanation for this phenomenon relies on the length scale of the geometry, macroscale, ratio with respect to the inner substructure, microscale. As this ratio approaches one and the length scales are in the same order, then the effects of the substructure shall be incorporated and we call this structure related material system metamaterial. This inner substructure might be simply the molecular structure. For example, in the case of crystalline materials with a lattice type substructure, the grain orientation leads to material anisotropy or change in parameters like the yield stress, these phenomena have been studied among others also in Reuss (1929); Hashin and Shtrikman (1962); Sharo and Kachanov (2000); Lebensohn et al. (2004). Such an inner substructure can be generated by adhering different materials, which is the case in composite materials and “effective” parameters read as a result of a homogenization procedure, see for example Levin (1976); Willis (1977); Kushnevsky et al. (1998); Sburlati et al. (2018). A system with inclusions like a porous material can be seen as a metamaterial, where the voids affect the material properties at the macroscale, we refer to Eshelby (1957); Mori and Tanaka (1973); Kanaun and Kudryavtseva (1986); Hashin (1991); Nazarenko (1996); Dormieux et al. (2006). Additive manufacturing—as in the case of 3D printing—is another prominent example to build up a metamaterial as applied in Kochmann and Venturini (2013); Placidi et al. (2016); Turco et al. (2017); Solyaev et al. (2018); Ganzosch et al. (2018); Yang et al. (2018). Often it is assumed that the substructure is periodic in a sense that the same cell is repeated for generating the structure at the macroscale. This so-called representative volume element is useful for an analysis of effective parameters. All these approaches are based on the assumption that the material response is modeled with the same phenomenological models at both scales.
By using the homogenization approach as in Pideri and Seppecher (1997); Bigoni and Drugan (2007); Seppecher et al. (2011); Abdoul-Anziz and Seppecher (2018); Mandadapu et al. (2018), we understand that the assumption of having the same material model can lead to inaccurate results such that a higher order theory needs to be incorporated at the macroscale as developed by Eringen and Suhubi (1964); Mindlin (1964); Eringen (1968); Steinmann (1994); Eremeyev et al. (2012); Polizzotto (2013a; 2013b); Ivanova and Vilchevskaya (2016); Abali (2018). Various times it has been observed that a generalized mechanics description is necessary for modeling mechanical response accurately as the thinner or smaller structure starts deviating from classical results as detected in Namazu et al. (2000); Lam et al. (2003); McFarland and Colton (2005); Gruber et al. (2008); Chen et al. (2010); dell’Isola et al. (2019). For a simple beam bending problem, conventional theory of elasticity fails to estimate the experimental results, as a remedy, for example the strain gradient theory in Abali and Müller (2016) is capable of capturing this effect, as applied by Abali et al. (2015), Abali et al. (2017); however, we need to know the additional parameters introduced for incorporating higher order effects.
As the inner substructure and its material response is set, a detailed model of the microscale can be used to determine the additional parameters at the macroscale. Thus, the parameter determination in generalized mechanics is not a new approach, see for example Forest et al. (1999); Pietraszkiewicz and Eremeyev (2009); Giorgio (2016) or also by using the asymptotic analysis in Bensoussan et al. (1978); Hollister and Kikuchi (1992); Chung et al. (2001); Temizer (2012) with an application in Forest et al. (2001); Li (2011); Eremeyev (2016) Barboura and Li (2018); Ganghoffer et al. (2018); Turco (2019). Often a representative volume element has been used, we remark that it is difficult to justify that the higher order theory has to inherit one, see the discussion in Rahali et al. (2015). Thus, we search for a method without implementing a representative volume element at all. In this work we briefly show the second order theory and the additional parameters occurring in this theory. Then we apply the general algorithm proposed by Abali et al. (2019) and define the parameters for a specific geometry.
2 Computational Approach
We strictly follow Abali et al. (2019) and use the equivalence of the stored energy at the microscale,
to the stored energy at the macroscale,
such that we have
Consider that we assume that the macroscale material properties are appropriate for an isotropic and centrosymmetric material
with the unknown material parameters, \(\varvec{c} = \{c_1, c_2, c_3, c_4, c_5, c_6, c_7\}\), which we obviously intend to determine. By simply inserting the latter into the energy equivalence and writing in a linear algebra fashion, as an example for one case denoted by the index 1 as follows:
we observe that the coefficient matrix, \(\varvec{A}\), as well as the right hand side, R, can be computed
for a problem with given, \(\ \! ^{\text {M}}\!\varvec{\varepsilon }\), and computed, \(\ \! ^{\text {m}}\!\varvec{\varepsilon }\). By defining 7 distinct cases, the system, \(\varvec{A} \varvec{c} = \varvec{R}\), with \(\varvec{A}\) of rank 7 provides a unique determination of unknowns by \(\varvec{c} = \varvec{A}^{-1} \varvec{R}\).
These seven cases are the one of the key choices in the approach and we use the following seven cases:
where the only necessary condition seems to be such a choice generating a rank 7 coefficient matrix. It is challenging (if even possible) to suggest experimental designs for constructing this given homogenized displacement on the structure. If we use a linear strain measure,
we can easily calculate the coefficient matrix for one of the aforementioned cases. For the right hand side, we compute \(\ \! ^{\text {m}}\!\varvec{u}\) for the detailed microscale of the continuum body, \({\mathcal {B}}\), by applying the boundary conditions acquired from the given \(\ \! ^{\text {M}}\!\varvec{u}\) evaluated on boundaries. Solving \(\ \! ^{\text {m}}\!\varvec{u}\) at the microscale is established by satisfying the weak form:
with the corresponding test functions, \(\updelta \varvec{u}\), from the same Hilbertian Sobolev space as the unknown, \(\ \! ^{\text {m}}\!\varvec{u}\), known as the Galerkin method,
The construction is automatized by using open-source programs like Salome, NetGen, and FEniCS (Alnaes et al. 2009; Logg et al. 2012), by using a Python code, we refer to Abali (2017) for a standard introduction of this weak form as well as the whole implementation.
3 Application
A pantographic structure has been studied for several systems, see for example Misra et al. (2018); Turco et al. (2019); dell’Isola et al. (2018); Solyaev et al. (2018); Harrison et al. (2018); Spagnuolo and Andreaus (2019); Greco et al. (2019). We aim at determining effective parameters in a strain gradient theory by applying the procedure from the last section for the pantographic structure as shown in Fig. 1. We emphasize that no representative volume element is used, instead, we simulate only a part of the whole structure as the macroscale displacement is provided as a function applied on this part.

Pantographic structure CAD model designed in Salome open-source platform. Left: the whole structure. Right: part of the structure used for the computation with the shown mesh generated by Netgen.
For a 3D printed pantographic structure out of ABS or PP, we may approximate a linear elastic response with Young’s modulus of \(E=400\times 10^6\) Pa and Poisson’s ratio of \(\nu =0.3\) leading to the following Lame parameters:
They are used in the microscale material response
which is simply the Hooke’s phenomenological model in isotropic linear elasticity. We emphasize that we use this assumption for clarity and fail to know if the material response of an additively manufactured polymer material is accurately captured by this model. Especially in semi-crystalline materials like PP, fused deposition modeling 3D printers may introduce extrusion orientation dependent anisotropic response. Moreover, the polymer material may behave hyperelastic. Another model is possible for obtaining the right hand side in Eq. (6) in order to increase the accuracy. Herein we use linear elastic model for demonstrating the methodology.
After solving 7 cases subsequently, computing the coefficient matrix, we have determined the 7 material and structure related parameters as follows:
4 Discussion and Conclusion
A simple yet elegant computational approach has been applied for obtaining the effective parameters as a result of a homogenization procedure in space in order to reduce the complexity of the structure modeling greatly. As an expense of additional parameters, we aim at incorporating the inner substructure effects by using higher gradients in the displacement. These additional parameters have been obtained by a purely computational methodology under the following assumptions:
-
At the microscale, the material model is linear elastic and isotropic.
-
At the macroscale, the material model is linear strain gradient elastic and isotropic as well as centrosymmetric.
Both assumptions are difficult to verify or falsify. We use these assumptions in the modeling for simplicity, more sophisticated approaches can be implemented as well, the general methodology remains still valid. The only possible validation for a concrete structure relies on an experimental study, which is left to further research endeavors.
References
Abali, B.E.: Computational Reality, Solving Nonlinear and Coupled Problems in Continuum Mechanics. Advanced Structured Materials, vol. 55. Springer Nature, Singapore (2017)
Abali, B.E.: Revealing the physical insight of a length-scale parameter in metamaterials by exploiting the variational formulation. Continuum Mechanics and Thermodynamics, pp. 1–10 (2018)
Abali, B.E., Müller, W.H.: Numerical solution of generalized mechanics based on a variational formulation. Oberwolfach Rep. Mech. Mater. Mech. Interfaces Evolving Microstr. 17(1), 9–12 (2016)
Abali, B.E., Müller, W.H., Eremeyev, V.A.: Strain gradient elasticity with geometric nonlinearities and its computational evaluation. Mech. Adv. Mater. Modern Process. 1(1), 1–11 (2015)
Abali, B.E., Müller, W.H., dell’Isola, F.: Theory and computation of higher gradient elasticity theories based on action principles. Arch. Appl. Mech. 87(9), 1495–1510 (2017)
Abali, B.E., Yang, H., Papadopoulos, P.: A computational approach for determination of parameters in generalized mechanics. In: Abali, B.E., Altenbach, H., Müller, W.H. (eds.) Higher Gradient Materials and Related Generalized Continua, chap. 1, pp. 1–18. Springer Nature, Singapore (2019)
Abdoul-Anziz, H., Seppecher, P.: Strain gradient and generalized continua obtained by homogenizing frame lattices. Math. Mech. Compl. Syst. 6(3), 213–250 (2018)
Alnaes, M.S., Logg, A., Mardal, K.A., Skavhaug, O., Langtangen, H.P.: Unified framework for finite element assembly. Int. J. Comput. Sci. Eng. 4(4), 231–244 (2009)
Barboura, S., Li, J.: Establishment of strain gradient constitutive relations by using asymptotic analysis and the finite element method for complex periodic microstructures. Int. J. Solids Struct. 136, 60–76 (2018)
Bensoussan, A., Lions, J.L., Papanicolaou, G.: Asymptotic Analysis for Periodic Structures. North-Holland, Amsterdam (1978)
Bigoni, D., Drugan, W.: Analytical derivation of cosserat moduli via homogenization of heterogeneous elastic materials. J. Appl. Mech. 74(4), 741–753 (2007)
Chen, C., Pei, Y., De Hosson, J.T.M.: Effects of size on the mechanical response of metallic glasses investigated through in situ tem bending and compression experiments. Acta Mater. 58(1), 189–200 (2010)
Chung, P.W., Tamma, K.K., Namburu, R.R.: Asymptotic expansion homogenization for heterogeneous media: computational issues and applications. Compos. Appl. Sci. Manuf. 32(9), 1291–1301 (2001)
dell’Isola, F., Seppecher, P., Alibert, J.J., Lekszycki, T., Grygoruk, R., Pawlikowski, M., Steigmann, D., Giorgio, I., Andreaus, U., Turco, E., et al.: Pantographic metamaterials: an example of mathematically driven design and of its technological challenges. Continuum Mechanics and Thermodynamics, pp. 1–34 (2018)
dell’Isola, F., Turco, E., Misra, A., Vangelatos, Z., Grigoropoulos, C., Melissinaki, V., Farsari, M.: Force-displacement relationship in micro-metric pantographs: experiments and numerical simulations. Comptes Rendus Mécanique 347(5), 397–405 (2019)
Dormieux, L., Kondo, D., Ulm, F.J.: Microporomechanics. Wiley, Chichester (2006)
Eremeyev, V.A.: On effective properties of materials at the nano-and microscales considering surface effects. Acta Mech. 227(1), 29–42 (2016)
Eremeyev, V.A., Lebedev, L.P., Altenbach, H.: Foundations of Micropolar Mechanics. Springer Science & Business Media, New York (2012)
Eringen, A.: Mechanics of micromorphic continua. In: Kröner, E. (ed.) Mechanics of Generalized Continua, pp. 18–35. Springer, Berlin (1968)
Eringen, A., Suhubi, E.: Nonlinear theory of simple micro-elastic solids. Int. J. Eng. Sci. 2, 189–203 (1964)
Eshelby, J.D.: The determination of the elastic field of an ellipsoidal inclusion, and related problems. In: Proceedings of the Royal Society of London Series A, Mathematical and Physical Sciences, pp. 376–396 (1957)
Forest, S., Dendievel, R., Canova, G.R.: Estimating the overall properties of heterogeneous cosserat materials. Modell. Simul. Mater. Sci. Eng. 7(5), 829 (1999)
Forest, S., Pradel, F., Sab, K.: Asymptotic analysis of heterogeneous cosserat media. Int. J. Solids Struct. 38(26–27), 4585–4608 (2001)
Ganghoffer, J., Goda, I., Novotny, A., Rahouadj, R., Sokolowski, J.: Homogenized couple stress model of optimal auxetic microstructures computed by topology optimization. ZAMM-J. Appl. Math. Mech./Zeitschrift für Angewandte Mathematik und Mechanik 98(5), 696–717 (2018)
Ganzosch, G., Hoschke, K., Lekszycki, T., Giorgio, I., Turco, E., Müller, W.H.: 3d-measurements of 3d-deformations of pantographic structures. Technische Mechanik 38(3), 233–245 (2018)
Giorgio, I.: Numerical identification procedure between a micro-Cauchy model and a macro-second gradient model for planar pantographic structures. Zeitschrift für angewandte Mathematik und Physik 67(4), 95 (2016)
Greco, L., Cuomo, M., Contrafatto, L.: Two new triangular g1-conforming finite elements with cubic edge rotation for the analysis of Kirchhoff plates. Comput. Methods Appl. Mech. Eng. 356, 354–386 (2019)
Gruber, P.A., Böhm, J., Onuseit, F., Wanner, A., Spolenak, R., Arzt, E.: Size effects on yield strength and strain hardening for ultra-thin Cu films with and without passivation: a study by synchrotron and bulge test techniques. Acta Mater. 56(10), 2318–2335 (2008)
Harrison, P., Taylor, E., Alsayednoor, J.: Improving the accuracy of the uniaxial bias extension test on engineering fabrics using a simple wrinkle mitigation technique. Compos. A Appl. Sci. Manuf. 108, 53–61 (2018)
Hashin, Z.: The spherical inclusion with imperfect interface. J. Appl. Mech. 58(2), 444–449 (1991)
Hashin, Z., Shtrikman, S.: On some variational principles in anisotropic and nonhomogeneous elasticity. J. Mech. Phys. Solids 10(4), 335–342 (1962)
Hollister, S.J., Kikuchi, N.: A comparison of homogenization and standard mechanics analyses for periodic porous composites. Comput. Mech. 10(2), 73–95 (1992)
Ivanova, E.A., Vilchevskaya, E.N.: Micropolar continuum in spatial description. Continuum Mech. Thermodyn. 28(6), 1759–1780 (2016)
Kanaun, S., Kudryavtseva, L.: Spherically layered inclusions in a homogeneous elastic medium. J. Appl. Math. Mech. 50(4), 483–491 (1986)
Kochmann, D.M., Venturini, G.N.: Homogenized mechanical properties of auxetic composite materials in finite-strain elasticity. Smart Mater. Struct. 22(8), 084, 004 (2013)
Kushnevsky, V., Morachkovsky, O., Altenbach, H.: Identification of effective properties of particle reinforced composite materials. Comput. Mech. 22(4), 317–325 (1998)
Lam, D.C., Yang, F., Chong, A., Wang, J., Tong, P.: Experiments and theory in strain gradient elasticity. J. Mech. Phys. Solids 51(8), 1477–1508 (2003)
Lebensohn, R., Liu, Y., Castaneda, P.P.: On the accuracy of the self-consistent approximation for polycrystals: comparison with full-field numerical simulations. Acta Mater. 52(18), 5347–5361 (2004)
Levin, V.: Determination of composite material elastic and thermoelastic constants. Mech. Solids 11(6), 119–126 (1976)
Li, J.: Establishment of strain gradient constitutive relations by homogenization. Comptes Rendus Mécanique 339(4), 235–244 (2011)
Logg, A., Mardal, K.A., Wells, G.: Automated solution of differential equations by the finite element method: The FEniCS book, vol. 84. Springer Science & Business Media (2012)
Mandadapu, K.K., Abali, B.E., Papadopoulos, P.: On the polar nature and invariance properties of a thermomechanical theory for continuum-on-continuum homogenization. arXiv preprint arXiv:180802540 (2018)
McFarland, A.W., Colton, J.S.: Role of material microstructure in plate stiffness with relevance to microcantilever sensors. J. Micromech. Microeng. 15(5), 1060–1067 (2005)
Mindlin, R.: Micro-structure in linear elasticity. Arch. Ration. Mech. Anal. 16(1), 51–78 (1964)
Misra, A., Lekszycki, T., Giorgio, I., Ganzosch, G., Müller, W.H., Dell’Isola, F.: Pantographic metamaterials show atypical poynting effect reversal. Mech. Res. Commun. 89, 6–10 (2018)
Mori, T., Tanaka, K.: Average stress in matrix and average elastic energy of materials with misfitting inclusions. Acta Metall. 21(5), 571–574 (1973)
Namazu, T., Isono, Y., Tanaka, T.: Evaluation of size effect on mechanical properties of single crystal silicon by nanoscale bending test using afm. J. Microelectromech. Syst. 9(4), 450–459 (2000)
Nazarenko, L.: Elastic properties of materials with ellipsoidal pores. Int. Appl. Mech. 32(1), 46–52 (1996)
Pideri, C., Seppecher, P.: A second gradient material resulting from the homogenization of an heterogeneous linear elastic medium. Continuum Mech. Thermodyn. 9(5), 241–257 (1997)
Pietraszkiewicz, W., Eremeyev, V.: On natural strain measures of the non-linear micropolar continuum. Int. J. Solids Struct. 46(3), 774–787 (2009)
Placidi, L., Greco, L., Bucci, S., Turco, E., Rizzi, N.L.: A second gradient formulation for a 2d fabric sheet with inextensible fibres. Zeitschrift für angewandte Mathematik und Physik 67(5), 114 (2016)
Polizzotto, C.: A second strain gradient elasticity theory with second velocity gradient inertia-part i: Constitutive equations and quasi-static behavior. Int. J. Solids Struct. 50(24), 3749–3765 (2013a)
Polizzotto, C.: A second strain gradient elasticity theory with second velocity gradient inertia-part ii: Dynamic behavior. Int. J. Solids Struct. 50(24), 3766–3777 (2013b)
Rahali, Y., Giorgio, I., Ganghoffer, J., dell’Isola, F.: Homogenization à la Piola produces second gradient continuum models for linear pantographic lattices. Int. J. Eng. Sci. 97, 148–172 (2015)
Reuss, A.: Berechnung der Fließgrenze von Mischkristallen auf grund der Plastizitätsbedingung für Einkristalle. ZAMM-Journal of Applied Mathematics and Mechanics/Zeitschrift für Angewandte Mathematik und Mechanik 9(1), 49–58 (1929)
Sburlati, R., Cianci, R., Kashtalyan, M.: Hashin’s bounds for elastic properties of particle-reinforced composites with graded interphase. Int. J. Solids Struct. 138, 224–235 (2018)
Seppecher, P., Alibert, J.J., dell’Isola, F.: Linear elastic trusses leading to continua with exotic mechanical interactions. In: Journal of Physics: Conference Series, IOP Publishing, vol. 319, p. 012018 (2011)
Shafiro, B., Kachanov, M.: Anisotropic effective conductivity of materials with nonrandomly oriented inclusions of diverse ellipsoidal shapes. J. Appl. Phys. 87(12), 8561–8569 (2000)
Solyaev, Y., Lurie, S., Ustenko, A.: Numerical modeling of a composite auxetic metamaterials using micro-dilatation theory. Continuum Mechanics and Thermodynamics, pp. 1–9 (2018)
Spagnuolo, M., Andreaus, U.: A targeted review on large deformations of planar elastic beams: extensibility, distributed loads, buckling and post-buckling. Math. Mech. Solids 24(1), 258–280 (2019)
Steinmann, P.: A micropolar theory of finite deformation and finite rotation multiplicative elastoplasticity. Int. J. Solids Struct. 31(8), 1063–1084 (1994)
Temizer, I.: On the asymptotic expansion treatment of two-scale finite thermoelasticity. Int. J. Eng. Sci. 53, 74–84 (2012)
Turco, E.: How the properties of pantographic elementary lattices determine the properties of pantographic metamaterials. In: Abali, B., Altenbach, H., dell’Isola, F., Eremeyev, V., Öchsner, A. (eds.) New Achievements in Continuum Mechanics and Thermodynamics, Advanced Structured Materials, vol. 108, pp. 489–506. Springer, Cham (2019)
Turco, E., Golaszewski, M., Giorgio, I., D’Annibale, F.: Pantographic lattices with non-orthogonal fibres: experiments and their numerical simulations. Compos. B Eng. 118, 1–14 (2017)
Turco, E., Misra, A., Sarikaya, R., Lekszycki, T.: Quantitative analysis of deformation mechanisms in pantographic substructures: experiments and modeling. Continuum Mech. Thermodyn. 31(1), 209–223 (2019)
Willis, J.: Bounds and self-consistent estimates for the overall properties of anisotropic composites. J. Mech. Phys. Solids 25(3), 185–202 (1977)
Yang, H., Ganzosch, G., Giorgio, I., Abali, B.E.: Material characterization and computations of a polymeric metamaterial with a pantographic substructure. Zeitschrift für angewandte Mathematik und Physik 69(4), 105 (2018)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2020 Springer Nature Switzerland AG
About this paper

Cite this paper
Abali, B.E., Yang, H. (2020). Parameter Determination of Metamaterials in Generalized Mechanics as a Result of Computational Homogenization. In: Indeitsev, D., Krivtsov, A. (eds) Advanced Problems in Mechanics. APM 2019. Lecture Notes in Mechanical Engineering. Springer, Cham. https://doi.org/10.1007/978-3-030-49882-5_2
Download citation
DOI: https://doi.org/10.1007/978-3-030-49882-5_2
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-49881-8
Online ISBN: 978-3-030-49882-5
eBook Packages: EngineeringEngineering (R0)