
Abstract
Within the framework of the linear model of the fluctuating time interval, there has been developed an analytical method for the statistical description of the dynamics of mechanical systems in variable time intervals of passing the fixed coordinates by the systems’ elements. We obtained the linear relations between the displacement variations and variations of time intervals for rotational, vibrational, and reciprocating motion in different coordinate systems. We also analytically assessed the influence of the type of motion and coordinates of fixed positions on the variations of time intervals. The research shows the possibility of restoring the true values of the displacement variations from the variations of the current oscillation period by multiplying each period variation value by the appropriate scale factor, which takes into account the coordinate of the fixed angular position. We found the system correlation functions and the frequency characteristics of transformations of the displacement variations in variations of the time intervals. On their basis, we analyzed the transformation features in the time and frequency domains. The advantages and disadvantages of measuring the current period, the current time interval and the current time for the experimental study of the dynamics of mechanical systems are determined. The study shows that the scope of linear relations depends on the type of motion and the choice of coordinates of the fixed positions and is limited to the level of relative variations of the period of no more than 10%.
Access provided by Autonomous University of Puebla. Download chapter PDF
Similar content being viewed by others

Keywords
15.1 Introduction
In the steady operating conditions, most of the mechanical systems of cyclic action, hereinafter referred to as mechanical systems (MS), perform rotational or quasi-periodic oscillatory motions close to uniform. The cyclical motion is manifested in the fact that after a certain constant time T, called a period, all the details of the ideal mechanical systems return to their original position.
Projected on the fixed axes of Cartesian coordinate system, the law of motion x(t) of links of non-ideal mechanical systems satisfies the inequality [1,2,3].
where T and \(\varepsilon \) are constant values. The smallest number T satisfying the condition (15.1) is called the period.
The traditional description of the MS dynamics consists of compiling the differential equations of motion and obtaining their solutions in the form of the dependence of the current displacement x, describing the state of the system, on time t. With time discretization of the continuous law of motion x(t), the flow of time is assumed to be uniform, and the time intervals \(\Delta t\) between successive moments of determining the displacement value are assumed to be constant (Fig. 15.1a). Such a discrete model provides a fairly sufficient description of the MS dynamics in the case if the sampling frequency satisfies the sampling theorem [4] and does not take into account the errors of real-time measurement, i.e., when approaching time as a purely geometric parameter.

Displacement dependence x on discrete time \({{t}_{n}}\) (a) and dependence of time points t on discrete displacement \({{x}_{n}}\) (b)
The principal feature of describing the MS dynamics in variable time intervals of passing the fixed angular or linear positions, i.e., coordinates, by the systems’ elements is the need to find the time points t, corresponding to certain discrete values of the displacement \({{x}_{n}}\), i.e., obtaining the dependence (Fig. 15.1b). In this case, the discretization of information retrieval is carried out by moving the elements of the MS itself.
From discrete values \({{t}_{n}}=t\left( {{x}_{n}} \right) \), it is possible to form various sequences of values of time intervals of the form
and their variations
where \({{\tau }_{0}}\) is the mean value of time intervals, \({{t}_{n}}\) are the time points, corresponding to the passage of coordinates of the fixed positions \({{x}_{n}}\).
In practice, the coordinate discretization interval depends on the measurement design and, in general, is non-uniform. The restrictions imposed by the sampling theorem on the discrete analogue of the continuous process t(x) remain valid and determine the required number of discrete coordinates of the fixed positions to reconstruct the spectrum of the continuous process. So, if the upper frequency of the studied frequency range or the highest expected frequency of oscillations is N-fold higher than the frequency of rotation or oscillation, then the number of discrete positions should be no less than 2N. Otherwise, part of the information contained in the high frequency part of the spectrum will be lost, and part of the spectrum will be distorted by the components due to the effect of frequency overlap [4].
Relations (15.2) and (15.3) are fundamental for studying the MS dynamics by the method of time intervals. To apply them in practice, it is necessary to study the features of transforming displacement fluctuations into fluctuations of time intervals with various types of motion and methods of recording. This paper is devoted to solving the problem of the analytical description of the MS dynamics in variable time intervals within the linear model of the fluctuating time interval.
15.2 Problem of Analytical Description of the Dynamics of Mechanical Systems in Variable Time Intervals
In an explicit form, the continuous law of motion \(t\left( x \right) \) can only be obtained from the differential equation of free vibrations of a conservative system with one degree of freedom [5]
where F(x) is the quasi-elastic characteristic in the form of a smooth, piecewise smooth, or piecewise linear restoring force. In the case of a symmetric restoring force, the period of free oscillations is calculated by the formula
where A is the oscillation amplitude. The formula (15.6), in particular, implies an important property of the non-isochronism of nonlinear systems, expressed in the dependence of the period of free oscillations on the amplitude.
For linear systems \(F(x)={{p}^{2}}x\), the calculation by the formula (15.6) gives a well-known solution \(T={2\pi }/{p}\). For nonlinear systems, calculations using the formula (15.6) are difficult and the result cannot be represented in the final form through elementary functions. Despite the fact that the formula (15.5) is fundamentally accurate, in practical applications it requires cumbersome calculations, usually not feasible in closed form. Therefore, various methods of approximate solutions of nonlinear differential equations of motion in the form x(t) are used.
It is known from the theory of oscillations that in autonomous conservative, auto-oscillating systems, as well as non-autonomous conservative and dissipative systems, under the influence of a periodic perturbing force, strictly periodic motion modes are implemented, for which at any time point t the following relation is fulfilled.
The description of the dynamics of such idealized mechanical systems in variations of a period, for example, does not make sense, since \(T=const\).
In mechanical engineering, idealized dynamic models of MS that describe periodic motion modes, where the period T is a constant, are most prevalent. Such models are based on the assumption of the existence of ideal constraints and that the kinematic chain of an ideal mechanism is always closed, i.e., the movement of all points of the mechanism is always reversible. To simplify the calculations, dynamic replacement schemes for machines and mechanisms are attempted to bring to a system with one degree of freedom, less often with two or a finite number of degrees of freedom. Possible deviations from periodicity are usually neglected, which greatly simplifies the obtaining of analytical solutions of the equations of motion, and, in particular, it makes it possible to find closed solutions to the problem of the action of an arbitrary periodic force.
Ideal models have proven themselves to be good in solving practical problems of mechanical engineering. They make it possible to explore the dynamic stability and are the basis for strength calculations, and in the first approximation, they describe the dynamics of real systems in good condition and are used to determine the norms for the output motion parameters, including kinematic ones.
Real machines and mechanisms differ from idealized models in more diverse properties. Due to defects in fabrication and installation, wear, gaps and slippage, the number of degrees of freedom of the system increases, the closure condition of the kinematic scheme is not observed—the positions occupied by the elements at some time point are never repeated again, and the movement is irreversible. In addition, there are always perturbing forces that depend on the structural and operating parameters of the machine, which excite oscillations of its elements at different frequencies, including those that are not multiple of the fundamental frequency of rotation or oscillation. All this excludes the possibility of an ideal periodicity. Therefore, in practice, one always has to deal with quasi-periodic processes, for which the condition of periodicity (15.7) is satisfied approximately (15.1).
Quasi-periodic processes are much more diverse than periodic ones. An example of deterministic quasi-periodic processes is damped oscillations
with a sufficiently small \(\beta \). Here, A, \(\beta \), and \(\omega \), \({{\varphi }_{0}}\) are constant values, \(T={2\pi }/{\omega }\). Another example is the sum of two or several oscillations with incommensurable frequencies
where \({{{\omega }_{2}}}/{{{\omega }_{1}}}\) is an irrational number, in general.
Stationary random oscillations, described by differential equations in which the coefficients and (or) free terms are random functions of time, are also quasi-periodic. An analogue of such equations in the classical theory does not exist. For them, a special theory of stochastic differential equations of K. Ito [6] type has been developed. When the solutions of these equations are Markov processes, there are effective methods for determining the finite dimensional distributions of the solution. For non-Markov processes such methods have not yet been found.
In the absence of an analytical description of the process of transforming linear and angular displacements into time intervals, it is not possible to find the law of motion t(x) explicitly. Therefore, in practice, the solution is sought numerically. For example, period variations \(\delta T(t)\) are calculated not from the solution of the differential equations of motion, where \(\delta T(t)\) acts as a variable, but numerically from the solution of implicit equations of the form
where \({{T}_{0}}\) is a mean period and \(\delta {{T}_{n}}\) are variations (fluctuations) of the period at time points \({{t}_{n}}\) obtained by displacement coordinates \(x({{t}_{n}})={{x}_{n}}\). In this case, it is necessary to take into account the features arising from the use of the formula (15.10) both in calculations and measurements of the period variations.
For example, from the graphs in Fig. 15.2, one can see that the period deviations \(\delta {{T}_{n}}\) calculated by the formula (15.10) for the case of the simplest quasi-harmonic oscillatory process of the form (15.8), depend not only on the parameters of the oscillatory process A, \(\beta \), T but also on the coordinates of the fixed positions \({{x}_{n}}\). When these deviations are commensurate with variations in the time intervals of a real object, it is necessary to take into consideration the influence of the coordinates of the fixed positions.
The fundamentals of the analytical description of the dynamics of high-quality oscillatory systems in variations and fluctuations of the period were laid in the monograph by Morozov [7]. In this work, for the high-quality torque balance as a measuring system that implements the procedure for measuring period variations (15.10), an approximate analytical relation was obtained for the first time, which relates variations in the angle of torsion of the torque balance arm \(\delta \varphi ({{t}_{n}})\), caused by seismic and gravitational disturbances, with period variations

Dependence of the period deviation \(\delta {{T}_{n}}\) of the oscillatory process (15.8) on the coordinates of the fixed positions \({{x}_{n}}\). Here, \(A=100\), \(1 - \beta =0.1\), \(T=0.001\); \(2 - \beta =0.1\), \(T=0.01\); \(3-\beta =0.5\), \(T=0.01\)
where \({{T}_{0\beta }}\) is the period of free torsional oscillations of the balance, \({{\Omega }_{0\beta }}={2\pi }/{{{T}_{0\beta }}}\) is the frequency of free oscillations, which is much higher than the characteristic frequency of external influences, \({{\varphi }_{0}}\) is the initial angle of torsion of the balance arm, and \({{t}_{n}}\) are time points, defined by angular coordinates of the fixed positions, i.e., \(\varphi ({{t}_{n}})={{\varphi }_{n}}\).
15.3 Method of Time Intervals
The rotational and oscillatory motion of MS elements is traditionally described either in the polar coordinate system \(\overline{\mathbf {r}} (\varphi )\), associated with the axis of rotation, i.e., the origin of the coordinate system during oscillations, or in projections onto the fixed axes of coordinates:
where: x(t) is the current projection displacement; \(\left| \overline{\mathbf {r}} (\varphi ) \right| \), \(\varphi (t)\) are the amplitude and phase of the cyclic motion, respectively.
The choice of the coordinate system is largely determined by the convenience of the mathematical description of the MS dynamics. Such a description in the general case includes a set of parameters on the left side of the differential equation, i.e., structural parameters of the system which determine the transfer function of the mechanical system, and the external influences on the right side of the equation, where M(t) is the external moment, F(t) is the external force. The influences determine the conditions and its operating conditions, and the law of control, if there is one. The dynamic analysis is carried out at given initial and boundary conditions. According to the formula (15.12), information about the MS dynamics is contained in the changes in the amplitude \(\left| \overline{\mathbf {r}} (\varphi ) \right| \) and the phase \(\varphi (t)\) of the law of motion x(t), as well as in the inverse function t(x) (Fig. 15.3).
The discrete process of receiving information about the time of passing the fixed positions by MS elements allows us to form different sequences of values of time intervals that form the basis of the time interval method.

Parameters that carry information about the dynamics of the mechanical system
We will distinguish the sequences that are obtained when implementing the procedures for measuring the following quantities:
-
1.
The current period \(T_n\) in the polar and Cartesian coordinate systems, respectively:
$$\begin{aligned} {{T}_{n}}=t({{\varphi }_{n}})-t({{\varphi }_{n-{{N}_{0}}}}) , \end{aligned}$$(15.13)$$\begin{aligned} x({{t}_{n}})=x({{t}_{n}}-{{T}_{n}}) , \end{aligned}$$(15.14)where \({{\varphi }_{n}}\) are the fixed angular positions of the MS element, \(n=1,2,\ldots \); \({{N}_{0}}\) is the number of the fixed positions in the cycle, and \({{t}_{n}}\) is the moment of passing of the fixed position by the MS element \({{x}_{n}}\), \(n=1,2,\ldots ,{{N}_{0}}\);
-
2.
The current time interval \({{\tau }_{n}}\) for the passage of the adjacent fixed positions in the polar and Cartesian coordinate systems, respectively:
$$\begin{aligned} {{\tau }_{n}}=t({{\varphi }_{n}})-t({{\varphi }_{n-1}}) , \end{aligned}$$(15.15)$$\begin{aligned} {{\tau }_{n}}=t({{x}_{n}})-t({{x}_{n-1}}) . \end{aligned}$$(15.16) -
3.
The current time \({{t}_{n}}\) for the passage of the fixed positions in the polar and Cartesian coordinate systems, respectively:
$$\begin{aligned} {{t}_{n}}=t({{\varphi }_{n}}) , \end{aligned}$$(15.17)$$\begin{aligned} {{t}_{n}}=t({{x}_{n}}) . \end{aligned}$$(15.18)
The development of the analytical description of the MS dynamics in variable time intervals involves finding dependencies that uniquely associate variations of displacements with variations of time intervals. The construction of these dependencies will make it possible to determine the time and spectral windows for the transformation of displacement parameters into time intervals, to have the possibility of studying the MS dynamics by the method of time intervals.
15.4 Relationship of Time Intervals with the Angle of Rotation During Rotational Motion
Let us find the relationship between the time intervals \({{T}_{n}}\), \({{\tau }_{n}}\) and \({{t}_{n}}\) with the angle of shaft rotation during rotational motion. Further, the index n, which corresponds to the passage of \({{\varphi }_{n}}\)th angular position by the shaft, will not be indicated without disturbing the generality of reasoning.
Assuming the number of the fixed angular positions of the shaft to be equal and neglecting the error of the interval of their location, we write down the relationship between the mean period \({{T}_{0}}\) and the mean time of passing the neighboring positions \({{\tau }_{0}}\) in the form
To determine the current period T(t) of the shaft rotation, we use the following relation [8]:
where \(\varphi \left( t \right) \) is the time dependence of the angle of shaft rotation. The solution of the integral relation (15.20) is sought within the linear model of the fluctuating time interval, considering that
where \(\delta T\left( t \right) \) is the period fluctuation.
Assuming that the shaft rotates according to the near-to-uniform law close, the equation of the shaft motion in the polar coordinate system is written in the form
where \({{\omega }_{0}}=2\pi /{{T}_{0}}\) is the mean angular frequency of shaft rotation; \({\delta \varphi \left( t \right) }\) are the small fluctuations of the angle of shaft rotation.
Further, unless otherwise specified, we will analyze the stochastic connectivity of the rotation angle with time intervals. Taking into account the assumptions made, the expression (15.20) in the first approximation takes the form
Let us introduce the notation
which is the mean velocity of fluctuations of the angle of shaft rotation of in the interval \(\left[ t-{{T}_{0}},t \right] \).
The formula (15.25) makes it possible to write a linear relation connecting fluctuations of the current period \(\delta T\left( t \right) \) with fluctuations of the angle \(\delta \varphi \left( t \right) \):
or, taking into account (15.26),
Analysis of the expression (15.28) shows that within the linear model of the fluctuating time interval, the relative period fluctuations with an accuracy of the sign are equal to the ratio of the mean velocity of fluctuations of the angle of shaft rotation over the period \({{T}_{0}}\) to the mean angular frequency of its rotation. From (15.28), in particular, it follows that with rotational motion, the condition for the smallness of period fluctuations (15.22) is satisfied if
The condition (15.29) clarifies (15.24), and as well as (15.22), it limits the scope of the linear relations (15.27) and (15.28).
After similar transformations, we obtain a relation connecting fluctuations of the current time interval for the passage of the adjacent fixed positions \(\delta \tau \left( t \right) \) with angle fluctuations \(\delta \varphi \left( t \right) \):
By analogy with the formula (15.23), we present the dependence of the current time on the angle of shaft rotation and fluctuations of the current time in the form
Simultaneously solving (15.23) and (15.31) and taking into account that \(t=t(\varphi )\) and \(\varphi =\varphi (t)\), we find the connection between fluctuations of the current time \(\delta t(t)\) and fluctuations of the angle \(\delta \varphi \left( t \right) \):
Note that the time t in formulas (15.27), (15.28), (15.30), and (15.32) is not arbitrary, but corresponds to the moments at which the shaft passes through the fixed angular positions \({{\varphi }_{n}}\).
The analysis of expressions (15.27) and (15.30) shows that fluctuations of the current period and time intervals contain information about the change in fluctuations of the angle of shaft rotation during the current time interval. This does not directly determine the current angle. Therefore, the restoration of the dependence \(\varphi \left( t \right) \) after performing transformations (15.27) and (15.30) or according to the results of measurements of time intervals \(T\left( t \right) \) and \(\tau \left( t \right) \) is not possible.
Another situation occurs when measuring the current time and describing the MS dynamics in variations of the current time, calculated by the formula (15.32). Fluctuations of the current angle of rotation \(\delta \varphi (t)\) and the current time \(\delta t\left( t \right) \) are in antiphase, differing only in the scale factor \({-{{T}_{0}}}/{(2\pi )}\). In the case of small fluctuations of the angle of rotation, the linear single-valued relation (15.32) allows us to first recover fluctuations of the angle of rotation \(\delta \varphi \left( t \right) \) from fluctuations of the current time \(\delta t\left( t \right) \) and then restore the dependence \(\varphi \left( t \right) \) using the formula (15.23).
Despite the simplicity of the expression (15.32), its use in practice to restore the dependence (15.23) from the results of temporary measurements is fraught with a number of difficulties. This is both a non-uniform interval of the fixed angular coordinates and a non-uniform in time discretization interval of determining the angular positions of the shaft. The algorithm for recovering the dependence \(\varphi \left( t \right) \) from measurements of time intervals \(T\left( t \right) \), \(\tau \left( t \right) \), and \(\delta t\left( t \right) \) is presented in [9].
In this paper, we confine ourselves to considering the features of analytical description of the MS dynamics in fluctuations of the current period and time intervals. Despite certain shortcomings in the completeness of the description and study of the MS dynamics, this approach, as will be shown below, has in some cases advantages over the algorithm [9], since it is insensitive to the fixed coordinates interval error.
We study the spectral correlation characteristics of transformations of fluctuations of the angle of rotation into fluctuations of time intervals. Taking into account the similarity of relations (15.27) and (15.30), we first define the form of the spectral window transformation into fluctuations of the current period, and then, based on the obtained expression, we make a formula describing the spectral window of transformation in the fluctuations of the current time interval.
Let the expression (15.27) describe an ideal system with one input and one output, then the time window of the transformation can be represented as
where \(\delta \left( t \right) \) is the delta function. The system correlation function of transforming angle fluctuations into fluctuations of the current period takes the form
In this case, the correlation functions of period fluctuations\({{R}_{\delta T}}\left( \tau \right) \) and angle fluctuations \({{R}_{\delta \varphi }}\left( \tau \right) \) will be related by the dependence
Applying the direct Fourier transform to the expression (15.34), we obtain the spectral window (Fig. 15.4) of transforming angle fluctuations into fluctuations of the current period
Similarly, the spectral window of transforming angle fluctuations into fluctuations of the current time interval has the form

Spectral window of transforming angle fluctuations into fluctuations of the current period \({{G}_{h,\delta T}}\left( \omega \right) \) and current time interval \({{G}_{h,\delta \tau }}\left( \omega \right) \) (\({{N}_{0}} = 4\))
When applying formulas (15.36) and (15.37), it is necessary to take into account the relation (15.19). As follows from the expression (15.36), when the condition
where k is any integer, is met, the amplitude of period fluctuations tends to zero. This means that when measuring the current period, processes that have frequencies close to \(\omega ={2\pi k}/{{{T}_{0}}}\) are not recorded. In particular, when measuring the current period, there is no possibility of recording processes at frequencies that are integer multiples of the mean frequency of shaft rotation. Due to this circumstance, the accuracy of measurement of the current period does not depend on the location of the fixed angular positions, but is determined only by the accuracy of measurements of time intervals. Similarly, it follows from (15.37) that when measuring the current time interval for the passage of the adjacent fixed angular positions, the above limitations, related to the impossibility of describing processes at frequencies which are integer multiple of the mean rotation frequency, are shifted to a higher frequency domain and take the form
The frequency extension leads to the fact that in current time intervals there is information both about the processes occurring in the MS and the interval error of the fixed angular positions. Thus, the uneven arrangement of the fixed angular positions contributes to the intensity of the spectral lines at frequencies that are integer multiples of the mean rotation frequency. For this reason, when putting into practice the procedure of measuring time intervals for a MS moving element to pass the fixed angular positions, the problem of their precise task arises, which in most cases is rather complicated or completely unsolvable.
From expressions (15.36) and (15.37), we can conclude that the intensity of fluctuations of time intervals with the same fluctuations of the angle of rotation is determined by the term \({T_{_{0}}^{2}}/{{{\pi }^{2}}}\). Therefore, with an increase in the mean frequency of shaft rotation, more precise means of measuring time intervals are required for recording the same angle fluctuations.
15.5 Relationship of the Period with the Displacement During Oscillatory Motion
The above statistical description of fluctuations of time intervals during rotational motion cannot be directly transferred to the MS whose links make oscillatory movements. This is due to the fact that the speed of movement of the oscillatory links during the passage of various fixed positions changes significantly depending on the displacement from the equilibrium position. For this reason, the description of fluctuations of the oscillation period of devices such as a torque balance or clock mechanisms is associated with the problem of finding the instrument functions of transforming fluctuations of linear and angular displacements of oscillating links into fluctuations of the oscillation period.
In the most general formulation, we consider the problem of transforming fluctuations of the variable \(x\left( t \right) \), which describes a linear displacement of a link performing rectilinear oscillations, from an equilibrium position in period fluctuations. The condition for determining the current oscillation period can be written as (15.14):
where \(T\left( t \right) \) is the current period of oscillation.
Assuming that oscillations occur according to a near-to-harmonic law, we write the equation of motion in Cartesian coordinate system in the form
where \({{x}_{0}}\) is the oscillation amplitude; \({{\omega }_{0}}=2\pi /{{T}_{0}}\) is the mean angular frequency of oscillations; \({{\alpha }_{0}}\) is the initial phase; \(\delta x\left( t \right) \) are small fluctuations, i.e., variations, of the oscillation link displacement with zero expectation. In addition, we believe that the velocity of fluctuations \(\delta \dot{x}(t)\) is small compared to the velocity of harmonic oscillations
Under these conditions, the oscillation period can be represented within the linear model of the fluctuating time interval, i.e. in the form of (15.21) and (15.22). Then, the expression (15.40) in the first approximation can be represented as
Solving simultaneously (15.41) and (15.44) and neglecting terms of a higher order of smallness, we obtain a relation connecting period fluctuations \(\delta T\left( t \right) \) with fluctuations of displacement \(\delta x\left( t \right) \) of the oscillatory link
or
where \(x_n\) are coordinates of the fixed positions in which time points \({{t}_{n}}=t({{x}_{n}})\) of passing the specified displacements are recorded, \(<\delta \dot{x}(t,{{T}_{0}})>\) is the mean velocity of displacement fluctuations for the period \({{T}_{0}}\) calculated by the formula (15.26). In (15.46), it is taken into account that, under the condition (15.43), the velocity of the oscillatory link in the first approximation is
where
is the piecewise constant function of the argument A. Note that in (15.45) and (15.46), time points t are not arbitrary but correspond to the moments of passing the fixed positions \({{x}_{n}}\) by the oscillatory link.
From the comparison of expressions (15.45) and (15.27), it follows that fluctuations of the period of oscillatory links depend on coordinates of the fixed positions. The scope of the expression (15.45) is substantially limited by conditions (15.42), (15.43) and the condition (15.22), which, as it can be seen from the expression (15.46), can be represented as
At the same time, the condition (15.43) is decisive, since its non-fulfillment leads to a change in the transformation function and calculation errors by the formula (15.45).
The description of fluctuations of the current time interval \(\delta \tau (t)\) or fluctuations of the current time \(\delta t(t)\) of passing the fixed positions by the oscillatory link is impossible within the linear model of the fluctuating time interval due to large changes in the motion speed. There is a need to use a nonlinear transformation with a time variable coefficient.
Performing similar transformations allows us to obtain a relation connecting the fluctuations of the period \(\delta T\left( t \right) \) and the angle of rotation \(\delta \varphi \left( t \right) \) for the link performing angular oscillations. For example, for the torque balance or the clockwork mechanism, in the polar coordinate system
where \({{\varphi }_{0}}\) is the amplitude of angular oscillations of the link; \({{\varphi }_{n}}\) are the fixed position angular coordinates.
The expression (15.50) can be reduced to the form (15.27) by multiplying the values \(\delta T\left( t \right) \) by a scale factor \(\sqrt{\varphi _{0}^{2}-\varphi _{n}^{2}}\). Moreover, each measured value \(\delta T\left( t \right) \) should be scaled, taking into account the angular coordinate of the fixed position. Similarly, to bring (15.45) to the form (15.27), it is necessary to multiply the measurement results by a scale factor \(\sqrt{x_{0}^{2}-x_{n}^{2}}\). Note that the direct use of measured period fluctuations \(\delta T\left( t \right) \) of the form (15.45) or (15.50) without performing the scaling described above causes certain difficulties in interpreting the data, due to the dependence \(\delta T\left( t \right) \) on the linear, that is angular, coordinates of the fixed positions, and not on the MS dynamics.
In accordance with the method described above, the relation (15.45) allows us to obtain an expression for the spectral window of transforming displacement fluctuations into fluctuations of the current period of oscillations during translational motion of the MS link. In the first approximation, with \({{x}_{n}}\ll {{x}_{0}}\), up to a constant factor, it will coincide with the formula (15.36)
Replacing the linear coordinate x with the angular coordinate \(\varphi \) in the formula (15.51) gives an expression for the spectral window of the current period in the case of angular oscillations of the MS link:
Thus, in the study of fluctuations of the oscillation period, expressions (15.36) and (15.37) can be used for rotational motion. In this case, one only needs to enter the appropriate scale factor.
The equation of the form (15.41) also reduces the problem of transforming the fluctuations of the shaft point projection displacement, the shaft making a near uniform rotational motion, into period fluctuations. The projection displacement equation in Cartesian coordinate system takes the form of
where \(\delta \varphi \left( t \right) \) are small fluctuations of the angle of shaft rotation. Using the trigonometric formula, we represent the expression (15.53) in the form
When the condition (15.24) is satisfied, as well as the smallness of the velocity of fluctuations of the angle \(\delta \dot{\varphi }(t)\) compared with the mean angular frequency \({{\omega }_{0}}\), i.e.,
Equation (15.54) in the first approximation takes the form (15.41), and the displacement \(\delta x\left( t \right) \) and the angle \(\delta \varphi \left( t \right) \) fluctuations will be related by
where \(\dot{x}(t)\) is the displacement velocity determined by the formula (15.47).
Using expressions (15.44) and (15.47), we obtain the relation connecting period fluctuations \(\delta T\left( t \right) \) and projection displacement fluctuations \(\delta x\left( t \right) \) of a point of the shaft making a rotational motion, in Cartesian coordinate system in the form (15.45).
Substitution of the formula (15.56) into the expression (15.45) allows the transition from Cartesian coordinate system to the polar one and to obtain the connection between fluctuations of the period \(\delta T\left( t \right) \) and the angle of shaft rotation \(\delta \varphi (t)\) in the form (15.27). However, it should be borne in mind that, unlike (15.27), the scope of the linear relation (15.45) and expression (15.56) is limited by the additional condition (15.55). As a result, the level of relative fluctuations of the current period, for which the linear relation (15.45) is satisfied, must be less than for the relation (15.27).
Thus, the instrument function of transforming displacement fluctuations into fluctuations of the current period and the level of relative fluctuations of the current period, which allows using a linear model of fluctuating time to study the MS dynamics, depend on the type of motion and the choice of the coordinate system.
15.6 Relationship of Time Intervals with Displacement During Reciprocating Motion
Changing the direction during the reciprocating motion of the MS moving element is usually accompanied by the excitation of transients. Therefore, the description of fluctuations of time intervals on these parts of motion within the linear model of the fluctuating time interval in the general case is not possible. However, if after the damping of transients the motion of the moving element is close to harmonic (15.41), then to describe small fluctuations of the current period, one can use the linear relation (15.45). If the movement is close to uniform
where \({{V}_{0}}\) is the mean velocity, \(\delta x(t)\) are the small fluctuations of the moving element displacement, then the description of fluctuations of time intervals for rotational motion can be fully transferred to fluctuations of time intervals during reciprocating motion.
Let us show this by describing the fluctuations of the current time interval. We believe that the recording of the current time interval \(\tau (t)\) for the passage of the adjacent fixed positions allows us to determine the current velocity of the moving element
where \(\Delta x\) is the distance between the adjacent fixed positions.
At a constant velocity of movement \({{V}_{0}}\), the time interval for the passage of the adjacent fixed positions will be constant
The formula for finding the current time interval can be written in general [10]:
The solution of the integral relation (15.60) in the framework of the linear model of the fluctuating time interval suggests that
where \(\delta \tau (t)\) are fluctuations of the current time interval.
According to the method outlined above, we obtain a relation connecting fluctuations of the current time interval \(\delta \tau \left( t \right) \) with displacement fluctuations \(\delta x\left( t \right) \):
or
where \(<\delta \dot{x}(t,{{\tau }_{0}})>\) is the mean velocity of displacement fluctuations in the interval \(\left[ t-{{\tau }_{0}},t \right] \), determined by the formula (15.26).
Substituting (15.57) and (15.59) into expression (15.63) allows us to write a linear relation connecting fluctuations of the current time interval \(\delta \tau (t)\) with the displacement x(t):
In accordance with the method described above, from the formula (15.63), it is possible to obtain an expression for the spectral window for transformation of displacement fluctuations into fluctuations of the current time interval
Having compared expressions (15.37) and (15.66), we found that the features and limitations inherent in fluctuations of the current time interval during rotational motion fully relate to fluctuations in the current time interval during reciprocating motion.
Let us consider the special features of the description of fluctuations that intersect in time of the current time intervals. In this case, the time and spectral transformation windows take the form
Here, \({{N}_{0}}\) is the number of intersecting time intervals and \({{T}_{0}}\) is the mean time of passing \({{N}_{0}}\) of the fixed positions, which is equal to (15.19). The upper frequency in the fluctuation spectrum of the current time interval will be equal to \({{{N}_{0}}}/{(2{{\tau }_{0}})}\), and at frequencies defined by the formula (15.38), the amplitude of fluctuations of the current time intervals will tend to zero. The system of “hills,” which is typical for time measurements, appears (see Fig. 15.4).
15.7 Estimation of the Scope of Linear Relations
In the framework of the linear model of the fluctuating time interval, in the first approximation, solutions of integral relations (15.20), (15.40), and Eq. (15.60) for various types of MS motions were obtained. The scope of linear relations (15.27), (15.30), and (15.32) is limited by conditions (15.24) and (15.29), and the scope of relations (15.45) and (15.50) is limited by conditions (15.42), (15.43), and (15.49).
To determine the scope of relations (15.27), (15.30), and (15.32), it is necessary to estimate the level of relative fluctuations of the period, which allows using inequality (15.22) when making the transition from the formula (15.20) to the expression (15.25). To do this, we conduct a numerical calculation of the dependence of the angle of shaft rotation on the current time in the polar coordinate system:
where \({{T}_{0}} = 1\,\text {s}\), \({{t}_{k}}=k\Delta t\); \(k=1,2\ldots \); \(\Delta t = 10^{-6}\,\text {s}\); \(\delta \varphi \left( {{t}_{k}} \right) \) is the white Gaussian variance noise \(\sigma _{\delta \phi }^{2}\). The values of the current period by \({{N}_{0}}=12\) fixed positions are calculated by the formula (15.13): \({{T}_{n}}={{t}_{k\left( n \right) }}-{{t}_{k\left( n-1 \right) }}\), where \({{t}_{k\left( n \right) }}\) is the current time of passing the nth fixed position, determined from the condition
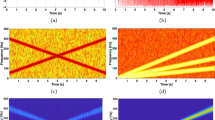
where \(n=1,2,\ldots \). The formula (15.28) was used to calculate the maximum value of relative fluctuations of the current period and the maximum value of relative fluctuations of the mean velocity of fluctuations of the angle of shaft rotation according to 12,000 values. The result of calculation is shown in Fig. 15.5.
Analysis of the numerical simulation results in Figs. 15.5 and 15.6 shows that the first approximation for solving the integral relation (15.20) quite well describes the relationship between angle fluctuations and fluctuations of time intervals in the steady-state mode of MS operation with a relative level of fluctuations of time intervals of no more than 10%. An increase in the intensity of angle fluctuations leads to a nonlinear transformation of angle fluctuations into period fluctuations, which is expressed in changes in the distribution function (Fig. 15.5) and low-frequency filtration in the spectral region (Fig. 15.6).
Thus, the application of the obtained spectral and time windows of transformations of angle fluctuations into fluctuations of time intervals is possible only for studying the dynamics of mechanical systems, whose elements make a near-to-uniform motion. In the study of the dynamics of mechanical systems, whose period of shaft rotation changes greatly, one must directly analyze the formula (15.20).

The ideal linear (1) and real nonlinear (2) transformation of fluctuations of the angle of rotation in the period fluctuations during rotational motion

Power spectral density of rotation period fluctuations at 12 angular positions: a \({{\left| {\delta T}/{{{T}_{0}}}\; \right| }_{\max }}=1.5\%\); b \({{\left| {\delta T}/{{{T}_{0}}}\; \right| }_{\max }}=16\%\)
The scope of linear relations (15.45) and (15.50) is limited not only by the level of fluctuations of the current period of 10%, but also by the stronger conditions (15.43) and (15.55), respectively. Failure to meet these conditions is easily detected by changing the shape of the spectral transformation window. Such situation is most likely to occur at large displacements of the moving element from the equilibrium position. In this case, the scope of linear relations (15.45) and (15.50) should be limited to \({{x}_{n}}\ll {{x}_{0}}\) or \({{\varphi }_{n}}\ll {{\varphi }_{0}}\).
15.8 Conclusion
The developed method of analytic description of the dynamics of cyclic mechanical systems is an approximate method, whose scope of applicability is limited to stationary modes of operation of machines and mechanisms. This is due to the fact that when considering models of systems with randomly varying time intervals, only the case of minor fluctuations of these intervals was considered. Such an assumption made it possible to obtain linear relations and, on their basis, to construct an analytical method for describing dynamical systems with fluctuating time intervals. Moreover, the simultaneous solution of linear and nonlinear differential equations of motion of mechanical systems with these relations allows us to find complete solutions in both time and frequency domains in variable time intervals. Examples of solving such problems are presented in [8, 10].
Application of the obtained relations is not only theoretical. They make it possible to properly interpret and process the results of experimental measurements of variations in time intervals of motion of mechanical systems elements, taking into account the influence of the type of motion and the coordinate system. Examples of solving problems of diagnosing machines and mechanisms by variations in time intervals are presented in [10, 11].
References
Il’in, M.M., Kolesnikov, K.S., Saratov, Yu.S.: Vibration theory. In: Kolesnikov, K.S. (ed.) Textbook for Universities. Bauman Moscow State Technical University, Moscow (2003) (in Russian)
Verichev, N.N., Verichev, S.N., Gerasimov, S.I., Erofeev, V.I.: Chaos, Synchronization and Structures in the Dynamics of Rotators. RFNC-VNIIEF, Sarov (2016). (in Russian)
Verichev, N.N., Gerasimov, S.I., Erofeev, V.I.: Additional Chapters of Vibration Theory. RFNC-VNIIEF, Sarov (2018). (in Russian)
Ifeachor, E.C., Jervis, B.W.: Digital Signal Processing: A Practical Approach, 2nd edn. Pearson Education, Harlow, UK (2002)
Biderman, V.L.: Applied Theory of Mechanical Vibrations. Manual for Technical Universities. Moscow, Vysshaya shkola (1972). (in Russian)
Blekhman, I.I. (ed.): Vibrations in Engineering: Reference Book in 6 vols., vol. 2. Oscillations of nonlinear mechanical systems. Mashinostroenie, Moscow (1979) (in Russian)
Morozov, A.N.: Irreversible Processes and Brownian Movement: Physical and Technical Problems. Bauman Moscow State Technical University, Moscow (1997). (in Russian)
Morozov, A.N., Nazolin, A.L.: Determinate and random processes in cyclic and dynamic systems. J. Eng. Math. 55(1–4), 277–298 (2006)
Resor, B.R., Trethewey, M.W., Maynard, K.P.: Compensation for encoder geometry and shaft speed variation in time interval torsional vibration measurement. J. Sound Vib. textbf286(4–5), 897–920 (2005)
Morozov, A.N., Nazolin, A.L.: Dynamic Systems with Fluctuating Time. Bauman Moscow State Technical University, Moscow (2001). (in Russian)
Morozov, A.N., Nazolin, A.L., Polyakov, V.I.: A precision optoelectronic system for monitoring torsional vibrations of turbine drive shafts. Doklady Phys. 62(1), 20–23 (2017)
Author information
Authors and Affiliations
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2020 Springer Nature Switzerland AG
About this chapter

Cite this chapter
Morozov, A.N., Nazolin, A.L. (2020). Analytical Method for Describing the Dynamics of Mechanical Systems in Variable Time Intervals. In: Altenbach, H., Eremeyev, V., Pavlov, I., Porubov, A. (eds) Nonlinear Wave Dynamics of Materials and Structures. Advanced Structured Materials, vol 122. Springer, Cham. https://doi.org/10.1007/978-3-030-38708-2_15
Download citation
DOI: https://doi.org/10.1007/978-3-030-38708-2_15
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-38707-5
Online ISBN: 978-3-030-38708-2
eBook Packages: EngineeringEngineering (R0)