
Abstract
Marine invertebrates potentially represent a group of species whose ecology may be influenced by artificial noise. Exposure to anthropogenic sound sources could have a direct consequence on the functionality and sensitivity of their sensory organs, the statocysts, which are responsible for their equilibrium and movements in the water column. The availability of novel laser Doppler vibrometer techniques has recently opened the possibility of measuring whole body (distance, velocity, and acceleration) vibration as a direct stimulus eliciting statocyst response, offering the scientific community a new level of understanding of the marine invertebrate hearing mechanism.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
The extent to which sound in the sea impacts and affects marine life is a topic of considerable concern both to the scientific community and to the general public. In addition, offshore economic interests could be at risk because of a lack of a rigorous scientific approach that would lead to precaution and excessive regulation. Marine invertebrates potentially represent a group of species whose ecology may be influenced by artificial noise. Exposure to anthropogenic sound sources could have a direct consequence on the functionality and sensitivity of their sensory organs, the statocysts, which are responsible for their equilibrium and movements in the water column. Statocyst functions generally include gravity and acceleration receptors (Maturana and Sperling 1963; Budelmann and Williamson 1994). Although statocysts have received considerable scientific attention in the past, especially in cephalopods, there is a significant gap in information on sound processing by marine invertebrates; there is still a need for definitive scientific evidence of the additional role of statocysts in low-frequency sound perception. Respiratory and electrophysiological methods confirmed cephalopod sensitivity to frequencies under 400 Hz (Kaifu et al. 2008; Hu et al. 2009), supporting the scientific consensus regarding the biological significance of the particle motion component of the sound field for these species.
Invertebrate sound receptors include a wide range of statocysts (Janse 1980; Laverack 1981), which are highly sophisticated structures that are analogous to the vestibular system of the vertebrate ear (Offutt 1970; Budelmann 1988, 1992; Williamson 1995). Vibrational and directional sensitivity of the statocyst hair cells of invertebrates, particularly of cephalopods, have been reported in the literature (Williamson 1988, 1989; Packard et al. 1990; Budelmann and Williamson 1994). Because of the high degree of development of their nervous system, characterized by the large size of the neurons, cephalopods were often used for neurophysiology studies (Bleckmann et al. 1991; Budelmann et al. 1995) to determine hearing thresholds. Here, we concentrate on these species to illustrate the general sound perception of marine invertebrates.
Cephalopod statocysts show a variety of forms, but they can be grouped into three main types (Budelmann 1988) depending on species (nautiloids, octopods, and decapods). They usually include two categories of receptor systems, the macula-statolith system and the crista-cupula system. The macula-statolith system informs on changes in the position according to gravity and linear acceleration, whereas the crista-cupula system indicates changes in angular acceleration. This presents analogies with the vestibular system of the vertebrate inner ear (Colmers 1977). However, unlike ciliated cells of vertebrates, the cephalopods’ statocyst sensory cells carry kinocilia. Microvilli are found surrounding the base of the kinocilium. Kinocilia and microvilli form elongated bundles. Each bundle represents a single hair cell. Every hair cell is arranged in line with an adjacent hair cell in both the crista and macula (Budelmann et al. 1973) and is unidirectional morphologically and physiologically polarized. Adjacent accessory structures (statolith, statoconia, cupula) are responsible for the sensory perception. When there is a stimulus, tiny deflations occur in the hair bundles, resulting in cell body depolarization and subsequent transmission of the information to the sensory nervous system.
At central nervous system level, the sensory input of the statocysts is used to regulate a wide range of behaviors, including locomotion, posture, control of eye movement, and body coloration pattern. In addition, there is now evidence the statocysts are also responsible for the reception of low-frequency sound waves (Kaifu et al. 2008; Hu et al. 2009; André et al. 2011; Solé et al. 2012). The sensory epithelia of the gravity receptor system, in resemblance to the vertebrate auditory apparatus (Puel et al. 2002), have secondary sensory hair cells that are unidirectional morphologically and physiologically polarized, first-order afferent neurons, and efferent nerve fibers. The synaptic arrangements are as complex as those in the vestibular maculae (see, e.g., Sans et al. 2001); the outputs of several hair cells converge onto an afferent neuron and the output of a single hair cell diverges onto several afferent neurons. The efferent fibers of the statocyst terminate on both hair cells and the axons of afferent neurons (Budelmann et al. 1987).
Although little is still known about the sound perception mechanism in invertebrates (Packard et al. 1990; Bleckmann et al. 1991; Bullock and Budelmann 1991; Kaifu et al. 2008; Hu et al. 2009), recent behavioral and electrophysiological experiments conducted on cephalopods confirmed the species sensitivity to frequencies under 400 Hz (Kaifu et al. 2007, 2008; Hu et al. 2009; Mooney et al. 2010) and the important role of statocysts in sound reception (Kaifu et al. 2008; Hu et al. 2009; André et al. 2011; Solé et al. 2012). Although there is little uncertainty regarding the biological significance of particle motion sensitivity versus acoustic pressure, the question is how particle motion is detected and transmitted to the statocysts from any acoustic source.
It was suggested that the particle motion can encompass the whole body of cephalopods and cause it to move with the same phase and amplitude; the statolith organs would then be stimulated by whole body displacements (Packard et al. 1990; Kaifu et al. 2011). The statolith organs are inertial detectors in which a calcareous statocyst is attached to the sensory hair cells. When an animal accelerates, the statolith moves, bending the sensory hair cells. Thus, the statolith could serve as a receptor of kinetic sound components (Packard et al. 1990; Kaifu et al. 2011). However, to the best of our knowledge, there has been no study that showed that the whole body can vibrate when stimulated by underwater sound in aquatic invertebrates or may be neither in aquatic vertebrates such as fishes.
The availability of novel laser Doppler vibrometer techniques has recently opened the possibility of measuring whole body (distance, velocity, and acceleration) vibration as a direct stimulus eliciting statocyst response, offering the scientific community a new level of understanding of the marine invertebrate hearing mechanism. These techniques have already been applied to several species such as amphibians, reptiles, and crustaceans (Hetherington and Lindquist 1999; Hetherington 2001). Although some preliminary experiments have been conducted using the laser Doppler techniques, no measurement of the whole body vibration induced by underwater sound was performed. Here we present a series of measurements conducted in controlled experimental conditions aimed at determining if cuttlefish and scallop bodies vibrate when stimulated with pure-tone sounds.
2 Methods
2.1 Controlled Exposure Experiment Conditions
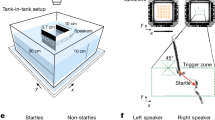
Controlled exposure experiments were conducted using the experimental setup shown in Fig. 6.1. The equipment was placed inside a closed room of dimensions 4.2 × 3.2 × 2.7 m. The room contained other furniture and objects that affected the acoustic field inside the room. The water tank (80 × 30 × 40 cm) was placed on top of a layer of foam on a table. The target (reference reflective objects, cuttlefish, and scallops) was placed on one side of the tank. The target was suspended with an elastic string from a wooden pole that was placed over the tank, supported on both sides by a tripod. The pole was not in contact with the tank. The target was positioned ~20 cm below the water surface. The vibrometer (Polytec OFV-505 with OFV-5000 controller) was placed on an absorbing foam layer and was never moved during the experiment. The beam angle had to be adjusted with each target, together with the orientation of the pole, to ensure a proper reflection. For animal targets, a small flat piece of aluminum foil attached to the body was used as a reflector. On the other side of the tank, a loudspeaker was suspended over the water supported by two tripods; no part of the loudspeaker setup was in direct contact with the tank or pole. The pure-tone signals were generated by an Agilent wave generator and passed on to the loudspeaker through a commercial amplifier. Changing the voltage level of the wave generator, keeping the amplifier at a fixed amplification setting, varied the source sound level.

Experimental setup for the vibration measurements
2.2 Targets
The invertebrate representative targets that were used in this experiment were cuttlefish and scallops, and a small dense metal bar and a small piece of reflective tape were chosen as reference targets because it was expected that, due to density differences, the scallops would vibrate at a speed closer to the metallic bar while the cuttlefish, because of its neutral buoyancy, would behave more like a freely floating small tape when exposed to sound. The animals were anesthetized during the exposure to avoid movement. When long exposure times were used, the animal awaking time was monitored and the experiments were resumed after the animal was put back to sleep.
The laser configuration was calibrated using a vibration source working at 160 Hz and 9.8 m/s2 (140 dB re a o = 10−6 m/s2 [acceleration reference level]). It was placed at the other side of the tank and measured through both tank walls (see Table 6.1). The vibration of the laser itself was measured as well for three frequencies of interest. The vibration measurement of a target was considered reliable if it was at least 10 dB higher than the vibration of the laser.
The consistency of the measurements and the effect of the precise position of the target were tested by measuring the inanimate targets at slightly different positions. The scallop and especially the cuttlefish were much larger than the test targets and measuring their vibration only at a single spot was not expected to be representative for the whole body.
Targets were never moved between measurements of different frequencies, although sometimes the focus of the laser beam had to be adjusted to ensure good reflection. Measurements were always made in a series of two, moving from the lowest to the highest frequency, exposing the target for at least 16 s, and then repeating the sequence from the lowest frequency.
2.3 Choice of Frequencies
A first series of measurements was conducted with a wide range of frequencies (from 60 to 360 Hz; see Table 6.2), together with corresponding sound pressure level (SPL) measurement. The difficulty of working with live animals required the selection of fewer frequencies for the final round of experiments. An obvious frequency to use appeared to be 320 Hz because it induced a large response of all targets. Two other frequencies, 60 and 120 Hz, were selected for further experimentation because of their proximity to the European Union Marine Strategic Framework Directive (MSFD) indicators that are being used to evaluate noise pollution (good environmental status [GES] indicator 11.2; van der Graaf et al. 2012).
2.4 Cuttlefish Body Response
Working with a live animal is difficult, especially for long exposure, due to the need for constant monitoring and pausing the experiment to renew the anesthesia. Continuing the experiment with the exact same target position and laser orientation was often impossible. The state of the animal can normally be monitored while taking measurements. We conducted controlled exposure experiments with both dead and live animals to estimate variations and validate results obtained from the measurements.
3 Results
3.1 Frequency Response
Table 6.2 shows the target accelerations at all measured frequencies.
3.2 Effect of Position on Measurements
At each position, multiple measurements showed very consistent results with identical peak levels. Then, repositioning the object, which required slight focus adjustment of the vibrometer beam without moving the vibrometer itself, led to considerable differences in some cases. At 60 and 120 Hz, some positions were quite close to the vibration levels of the vibrometer; this was not unexpected for the bar. After repositioning, the measured levels were above the self-vibration. At 320 Hz, all measurements were consistent and well above self-vibration.
3.3 Comparison of Dead to Alive Animals
A slow-frequency oscillation corresponding to the breathing rate of the animal was monitored during the measurements of live individuals. The magnitude of the oscillation may be dependent on the state of anesthesia, but this breathing motion did not affect the acceleration measurement induced by the acoustic wave. The dead animal measurements were all identical between exposures, whereas the live animal measurements showed differences not only between animals but also between exposures of the same animal. The measurements of the dead animal, however, fell in the same acceleration range as those of the live animals or what was explained by a change in position.
3.4 Body Vibration
Figure 6.2 shows the results of the four targets (reference targets and animals) at the three chosen frequencies.

Laser Doppler target acceleration measurements at the three chosen frequencies
4 Discussion and Conclusions
There was little doubt that marine invertebrates were sensitive to (i.e., perceive) low-frequency sounds and that this sensitivity was not directly linked to sound pressure but to particle motion. The missing component in the analysis was the demonstration that the statolith would act as an harmonic oscillator, excited when the whole animal body was vibrating when exposed to sound waves.
The differences of the laser Doppler acceleration measurements (see Table 6.1) with the target vibration measurements (Fig. 6.2) allow us to conclude that the exposure to sound has elicited the cephalopods and scallops whole body vibration, confirming the initial hypothesis that particle motion can encompass the whole body of cephalopods and cause it to move with the same phase and amplitude (Packard et al. 1990; Kaifu et al. 2011) as well as consolidating the use of laser Doppler techniques in underwater bioacoustics studies.
References
André M, Solé M, Lenoir M, Durfort M, Quero C, Mas A, Lombarte A, van der Schaar M, López-Bejar M, Morell M, Zaugg S, Houégnigan L (2011) Low-frequency sounds induce acoustic trauma in cephalopods. Front Ecol Environ 9:489–493. doi:10.1890/100124
Bleckmann H, Budelmann BU, Bullock TH (1991) Peripheral and central nervous responses evoked by small water movements in a cephalopod. J Comp Physiol A 168:247–257
Budelmann BU (1988) Morphological diversity of equilibrium receptor systems in aquatic invertebrates. In: Atema J, Fay RR, Popper AN, Tavolga WN (eds) Sensory biology of aquatic animals. Springer, New York, pp 757–782
Budelmann BU (1992) Hearing in nonarthropod invertebrates. In: Webster DB, Popper AN, Fay RR (eds) The evolutionary biology of hearing. Springer, New York, pp 141–155
Budelmann BU, Barber VC, West S (1973) Scanning electron microscopical studies of the arrangements and numbers of hair cells in the statocysts of Octopus vulgaris, Sepia officinalis and Loligo vulgaris. Brain Res 56:25–41
Budelmann BU, Bullock TH, Williamson R (1995) Cephalopod brains: promising preparations for brain physiology. In: Abbott NJ, Williamson R, Maddock L (eds) Cephalopod neurobiology. Oxford University Press, London, pp 399–413
Budelmann BU, Sachse M, Staudigl M (1987) The angular acceleration receptor system of the statocyst of Octopus vulgaris: morphometry, ultrastructure, and neuronal and synaptic organization. Philos Trans R Soc Lond B Biol Sci 315:305–343
Budelmann BU, Williamson R (1994) Directional sensitivity of hair cell afferents in the octopus statocysts. J Exp Biol 187:245–259
Bullock TH, Budelmann BU (1991) Sensory evoked potentials in unanesthetized unrestrained cuttlefish: a new preparation for brain physiology in cephalopods. J Comp Physiol A 168:141–150
Colmers WF (1977) Neuronal and synaptic organization in the gravity receptor system of the statocyst of Octopus vulgaris. Cell Tissue Res 185:491–503
Hetherington TE (2001) Laser vibrometric studies of sound-induced motion of the body walls and lungs of salamanders and lizards: Implications for lung-based hearing. J Comp Physiol A 187:499–507
Hetherington TE, Lindquist ED (1999) Lung-based hearing in an “earless” anuran amphibian. J Comp Physiol A 184:395–401
Hu MY, Yan HY, Chung W, Shiao J, Hwang P (2009) Acoustically evoked potentials in two cephalopods inferred using the auditory brainstem response (ABR) approach. Comp Biochem Physiol A Mol Integr Physiol 153:278–283
Janse C (1980) The function of statolith-hair and free-hook-hair receptors in the statocyst of the crab (Scylla serrata). J Comp Physiol A 137:51–62
Kaifu K, Akamatsu T, Segawa S (2008) Underwater sound detection by cephalopod statocyst. Fish Sci 74:781–786
Kaifu K, Akamatsu T, Segawa S (2011) Preliminary evaluation of underwater sound detection by the cephalopod statocyst using a forced oscillation model. Acoust Sci Technol 32:255–260
Kaifu K, Segawa S, Tsuchiya K (2007) Behavioral responses to underwater sound in the small benthic octopus Octopus ocellatus. J Mar Acoust Soc Jpn 34:266–273
Laverack M (1981) The adaptive radiation of sense organs. In: Laverack M, Cosens DJ (eds) Sense organs. Blackie Academic and Professional, Glasgow, pp 7–30
Maturana HR, Sperling S (1963) Unidirectional response to angular acceleration recorded from the middle cristal nerve in the statocyst of Octopus vulgaris. Nature 197:815–816
Mooney AT, Hanlon R, Madsen PT, Christensen-Dalsgaard J, Ketten DR, Nachtigall PE (2010) Sound detection by the longfin squid (Loligo pealei) studied with auditory evoked potentials: sensitivity to low-frequency particle motion and not pressure. J Exp Biol 213:3748–3759
Offutt GC (1970) Acoustic stimulus perception by American lobster Homarus americanus (Decapoda). Experientia 26:1276–1278
Packard A, Karlsen HE, Sand O (1990) Low frequency hearing in cephalopods. J Comp Physiol A 166:501–505
Puel JL, Ruel J, Guitton M, Pujol R (2002) The inner hair cell afferent/efferent synapses revisited: a basis for new therapeutic strategies. Adv Otorhinolaryngol 59:124–130
Sans A, Dechesne CJ, Demêmes D (2001) The mammalian otolithic receptors: a complex morphological and biochemical organization. Adv Otorhinolaryngol 58:1–14
Solé M, Lenoir M, Durfort M, López-Bejar M, Lombarte A, van der Schaar M, André M (2012) Does exposure to noise from human activities compromise sensory information from cephalopod statocysts? Deep-Sea Res Pt II 95:160–181. doi:10.1016/j.dsr2.2012.10.006
van der Graaf AJ, Ainslie MA, André M, Brensing K, Dalen J, Dekeling RPA, Robinson S, Tasker ML, Thomsen F, Werner S (2012) European Marine Strategy Framework Directive Good Environmental Status (MSFD GES). Report of the Technical Subgroup on Underwater Noise and other forms of energy, 27 February 2012. Available at http://ec.europa.eu/environment/marine/pdf/MSFD_reportTSG_Noise.pdf
Williamson R (1988) Vibration sensitivity in the statocyst of the northern octopus, Eledone cirrosa. J Exp Biol 134:451–454
Williamson R (1989) Electrical coupling between secondary hair cells in the statocyst of the squid Alloteuthis subulata. Brain Res 486:67–72
Williamson R (1995) The statocysts of cephalopods. In: Abbott NJ, Williamson R, Maddock L (eds) Cephalopod neurobiology: neuroscience studies in squid, octopus and cuttlefish. Oxford University Press, Oxford
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2016 Springer Science+Business Media New York
About this paper
Cite this paper
André, M. et al. (2016). Contribution to the Understanding of Particle Motion Perception in Marine Invertebrates. In: Popper, A., Hawkins, A. (eds) The Effects of Noise on Aquatic Life II. Advances in Experimental Medicine and Biology, vol 875. Springer, New York, NY. https://doi.org/10.1007/978-1-4939-2981-8_6
Download citation
DOI: https://doi.org/10.1007/978-1-4939-2981-8_6
Publisher Name: Springer, New York, NY
Print ISBN: 978-1-4939-2980-1
Online ISBN: 978-1-4939-2981-8
eBook Packages: Biomedical and Life SciencesBiomedical and Life Sciences (R0)