
Abstract
Motorcycling is a fascinating kind of transportation. While the riders’ direct exposure to the environment and the unique driving dynamics are essential to this fascination, they both cause a risk potential which is several times higher than when driving a car.
This chapter gives a detailed introduction to the fundamentals of motorcycle dynamics and shows how its peculiarities and limitations place high demands on the layout of dynamics control systems, especially when cornering. The basic principles of dynamic stabilization and directional control are addressed along with four characteristic modes of instability (capsize, wobble, weave, and kickback). Special attention is given to the challenges of braking (brake force distribution, dynamic over-braking, kinematic instability, and brake steer torque induced righting behavior).
It is explained how these challenges are addressed by state-of-the-art brake, traction, and suspension control systems in terms of system layout and principles of function. It is illustrated how the integration of additional sensors – essentially roll angle assessment – enhances the cornering performance in all three categories, fostering a trend to higher system integration levels.
An outlook on potential future control systems shows exemplarily how the undesired righting behavior when braking in curves can be controlled, e.g., by means of a so-called brake steer torque avoidance mechanism (BSTAM), forming the basis for predictive brake assist (PBA) or even autonomous emergency braking (AEB). Finally, the very limited potential of brake and chassis control to stabilize yaw and roll motion during unbraked cornering accidents is regarded, closing with a promising glance at roll stabilization through a pair of gimbaled gyroscopes.
Access provided by Autonomous University of Puebla. Download reference work entry PDF
Similar content being viewed by others

Keywords
These keywords were added by machine and not by the authors. This process is experimental and the keywords may be updated as the learning algorithm improves.
1 Introduction
In 2010, the probability of being killed in a motorcycle accident in Germany was more than 12 times that of being killed in any other form of road accident, for the same distance traveled (DESTATIS 2013). The combination of longitudinal, lateral, and vertical dynamics at play when leaning into a bend on a motorcycle holds a great fascination but, at the same time, places high demands upon the design of vehicle dynamics control systems.
This is why, for many years, the only systems on the market were brake and traction control systems for straight travel and therefore of limited use for bends. The first antilock braking system (ABS) for motorcycles appeared on the market in 1988 (Stoffregen 2010) and the first traction control in 1992 (Tani et al. 1993). Traction Control Systems that could detect curved trajectories by means of sensors and allow for them in control first became available in 2009 (Landerl et al. 2010) – and similar ABS in 2013 (Bosch 2013a). Since 2012 there have also been semi-active suspensions on the market (Böhringer 2013), promising further improvements by interacting with the existing systems.
Although the market penetration of vehicle dynamics control systems for motorcycles is limited compared with that for cars, there has been a huge increase in their acceptance and fitting rates over the last few years (for ABS as an example, cf., e.g., DAT 2014; ADAC 2010; Bosch 2013b). The legislator is now providing some impetus for these systems by requiring that, throughout Europe, all newly developed motorcycles over 125 cm3 are equipped with ABS as from 2016 and all new vehicles of this capacity as from 2017 (EU 2013).
This chapter outlines the limits of vehicle dynamics control systems for motorcycles, provides an overview of the functioning of existing systems, and looks at what the future holds for vehicle dynamics control systems.
2 Dynamic Stability
The most obvious difference between motorcycles (for which the technically accurate term is single-track vehicles) and cars (two-track vehicles) is the stability of the vehicle – especially at standstill. A motorcycle is an unstable system; without stabilization it tips over and falls (for which the technically accurate term is capsize); it is stabilized by various dynamic mechanisms. But it is precisely this instability that allows a type of driving that makes motorcycling a fascinating mode of travel: Corners are taken in a leaning position. The lean angle of the vehicle is known as the roll angle λ and, in a steady-state circular course, is such that the resultant of centrifugal force and mass force of the vehicle intersects the tire contact line. There is no rolling moment around the tire contact line and the vehicle moves – like an inverted pendulum – in so-called unstable equilibrium. The force equilibrium of steady-state cornering is shown in Eq. 1 and Fig. 1.


Force equilibrium during cornering with additional roll angle determined by tire width
The arising theoretical (physically active) roll angle λth is
with mass force of the vehicle G, centrifugal force FC, mass m, lateral acceleration related to the lane ay, driving speed v, and curve radius R. The roll angle is therefore only dependent upon lateral acceleration. With the maximum lateral friction coefficient of the tires,
the maximum roll angle is obtained as
On dry, gripping road surfaces, the lateral friction coefficients of modern motorcycle tires reach values of around 1.2. This means that physical roll angles of up to 50° are drivable.
However, the theoretical roll angle and the roll angle equation (Eq. 1) are only valid for idealized tires without width. With real tires, an additional roll angle is required to maintain equilibrium, because the tire contact patch does not lie in the symmetry plane of the vehicle; see Fig. 1. The so-called tire-related additional roll angleλ′ is approximately 10 % of λth, depending upon the tire width (more) and height of the center of gravity (less).
Other additional roll angles (λ″, λ‴) are one or two more orders of magnitude below this first tire-width-related additional roll angle and are negligible for the purpose of understanding the peculiarities of the driving dynamics of motorcycles in practice (Weidele 1994). The overall (total) roll angle for standard tire widths and center of gravity heights of modern motorcycles is therefore
Under ideal conditions (of μlat,max = 1.2), geometric roll angles of up to 55° can therefore occur for typical motorcycles. As a rule, the roll angle is limited to values of around 50° because of add-on components such as exhaust system and footrests, so that ideally a small safety margin remains.
The previously described unstable equilibrium ceases to return to the position of equilibrium with the smallest deflections; this attribute is called instability. Motorcycles are stabilized by two mechanisms:
-
At low speeds below approx. 30 km/h, for example, the rider mostly stabilizes the motorcycle by making steering adjustments, which, like the balancing of bicycles, can be supported by the rider shifting his/her weight.
-
At higher speeds above approx. 30 km/h, the gyroscopic effect of rotating masses stabilizes the motorcycle. In particular, the rotating front wheel makes a significant contribution and is of utmost importance for gyroscopic stabilization.
-
There is a fluid transition between these two mechanisms.
Figure 2 shows the system of motorcycle and rider with tire contact patches and projection of the center of gravity. It illustrates how, by moving the handlebars, it is possible to control the horizontal distance between center of gravity and tire contact line – at first approximation this is the roll axis. In addition to the steering adjustments, the rider can also move his/her weight relative to the vehicle to control the lever arm between the center of gravity and roll axis, thereby stabilizing the rolling motion. However, it is the steering adjustments that are the most important, because even cabin motorcycles, where there is limited opportunity to shift body weight, can be driven stably at low speeds.


Stabilization by steering adjustments and possibly shifting body weight
From speeds of approximately 30 km/h upwards, the angular moments of the wheels (and other rotating parts of the motorcycle) reach such high values that the tipping motion or capsize of the vehicle is stabilized by their gyroscopic effect. The stabilization mechanism is illustrated in Fig. 3.


Stabilization due to gyroscopic effect at the front wheel
A gyroscope that is disturbed perpendicular to its rotational axis responds with a reaction moment perpendicular to the rotational and disturbance axis. This mechanism couples the equation of motion of the motorcycle around the longitudinal axis with the equation of motion of the steering system. A roll motion of the vehicle (e.g. to the right) causes the steering system to skew in the same direction. The lateral force on the front wheel generated by the steering angle produces equivalent centrifugal force at the center of gravity, which re-rights the vehicle (in this example, towards the left). In the same way as the lateral force with the trail as lever arm, the generated gyroscopic reaction moment exerts a resetting steering torque (cf. Fig. 2).
Since the coupling gyroscopic moments are a function of the respective disturbance speed in the steering or rolling direction, they also serve to damp the stabilization process. In an infinite sequence of the previously described effect chain, the stabilization process can be visualized as driving in wavy lines, which become smaller and smaller with increasing speed. From approximately 30 km/h, the tipping motion of the capsize mode is largely damped and the vehicle travels without any apparent deflections in steering and roll angle.
With increasing speed, the gyroscopic effect of the wheels increases once more; from speeds of approximately 130 km/h, the system can again become unstable, depending upon its stability characteristics. The so-called (high-speed) weave eigenmode of the motorcycle is a coupled yawing, rolling, and steering oscillation of the entire vehicle, which increases with speed and in extreme cases can lead to a fall by exceeding the traction limits at the front and/or rear wheel (Bayer 1986). Depending upon the vehicle, weave frequencies are between 2 and 4 Hz. The most effective remedy for incipient weave is to reduce speed. The main influences on the excitation of weave oscillations are the torsional stiffness between the front and rear wheel and the inertial characteristics of the vehicle. Minimizing weave is an important aspect in the development of modern motorcycles. Therefore, it typically only occurs in exceptional cases.
Another technically relevant eigenmode – which is similarly minimized during the development of a new vehicle – is the so-called wobble , a rotational oscillation of the steering system that is also known as flutter or tank-slappers. The usual frequencies of wobble oscillations are in the region of 10 Hz. This frequency corresponds to the rotation frequency of standard front wheels at approximately 60–80 km/h, the wobble being excited by wheel imbalances and irregularities. Usually this can be countered by gripping the handlebars more firmly, in order to increase the moment of inertia around the steering axis by coupling the rider’s body and so push the oscillating system down to a lower eigenfrequency.
Another form of oscillation of the steering system is the so-called kickback, which is not a natural mode but a parametrically excited oscillation with many different influencing variables. A prerequisite for the occurrence of kickback is wheel load fluctuation – for example, due to a bump in the ground – at the front wheel with prevailing steering torque. If the wheel load drops rapidly, the prevailing steering torque turns the steering system in and the sideslip angle of the front wheel increases. If the wheel load subsequently increases, there is excessive sideslip and therefore excessive side force on the front wheel, which turns the handlebars back into direction of the neutral position. With corresponding excitation, these handlebar movements can even cover the entire range between the two end stops. The usual remedy against kickback is to use hydraulic steering dampers. In order to reconcile the conflicting aims of easy handling with light steering at low speeds and controlling kickback, semi-active steering dampers with electronically adjustable damping – e.g., the Honda Electronic Steering Damper (HESD) – have been successfully used in series production vehicles since 2004 (Wakabayashi and Sakai 2004). The use of this technology to influence the eigenmodes of weave and wobble is the subject of ongoing research (De Filippi et al. 2011a).
3 Braking Stability
The additional roll angle introduced in the previous section has a particularly marked effect when braking in curves: The steering axis of a motorbike is normally in the symmetry plane. Braking forces, which act in the tire contact patch, therefore maintain a lever arm to the steering axis when cornering; see Fig. 1. Via this so-called (tire) scrub radius (SR), the braking forces induce a misaligning steering torque, the so-called brake steer torque (BST). It is the riders’ task to compensate for this disturbance and stay on course. If they do not succeed, the steering system turns into the curve, sideslip angle at the front wheel and lateral acceleration increase, and the vehicle straightens up in interaction with the gyroscopic forces of the inward-turning front wheel and – often unexpectedly for the rider – forces the bike into a wider radius (Schröter et al. 2013). In extreme cases, the brake steer torque reaches values of approx. 90 Nm, which follow the buildup in braking pressure with virtually no delay. If the braking force also pulses, for example, due to a “roughly” controlling ABS on the front wheel, it becomes practically impossible for the rider to stay on course. Although the righting behavior due to brake steer torque is actually a whole chain of effects, it is frequently referred to simply as “righting moment.”
The behavior of motorcycles in the event of wheel locking also differs significantly from that of two-track vehicles. For the latter, locking of both front wheels does not compromise the directional stability of the vehicle – in contrast to locking of the rear wheels. In the case of motorcycles, on the other hand, front wheel locking almost inevitably leads to a fall: The reasons for this are the loss of gyroscopic stabilization and, even more importantly, the kinematic instability of the vehicle. For a two-track vehicle, front wheel locking is stable up to a certain sideslip angle limit – for standard cars this is approximately 45°. In motorcycles, even small deviations in sideslip angle or roll angle are sufficient to cause self-amplification of yawing and rolling motion; see Fig. 4. A locked front wheel (slip s = 1) now only transfers a force against its direction of motion determined by the value of μslip and wheel load, but no longer any cornering force. If this force has a lever arm around the center of gravity, this causes sideslip or yaw rotation; if the rotation increases the lever arm, this is an unstable movement.


Since the motorcycle is an unstable vehicle and is constantly stabilized by the gyroscopic effects or steering movements, there is constant transverse force acting on the tire contact patches. A braking force acting on the front wheel against the direction of motion (as in the case of a locked front wheel) always causes a self-amplifying yawing motion – the tire contact line turns away under the center of gravity. Measured times between locking of the front wheel and crashing are between approximately 0.2–0.7 s; if the vehicle is already cornering, these times are much shorter (Funke 2007). The ideal distribution of braking force on the front and rear wheels is very different for motorcycles than it is for cars: The ratio between the height of the center of gravity and the wheelbase is much greater in motorcycles than in cars. Therefore, the wheel load transfer during deceleration is also greater. In conjunction with today’s high-grip tires, modern motorcycles can reach the brake flip-over point. The maximum deceleration is often limited by the position of the center of gravity and the wheelbase, that is to say the geometric data of the vehicle, and no longer by the braking system or tires.
Figure 5 shows the ideal brake force distribution of a typical car (Opel Astra H) and a typical supersport motorcycle (Honda CBR 600 RR), disregarding changes in chassis geometry that are related to brake pitch and dive. The ideal brake force distribution of the motorcycle intersects the abscissa at a braking rate of 1.0 (that is to say at a deceleration of 9.81 m/s2 corresponding to gravitational acceleration). Greater decelerations would only be possible with the rear wheel lifting off ground, so that the vehicle would no longer be stable. The illustrated braking force distributions are only valid for traveling without lateral acceleration. During corner braking, dynamically variable cornering forces also have to be supported at the tire contact patches. This reduces the transferable braking forces and consequently changes the ideal brake force distribution (BFD) (cf. Weidele 1994; Schröter et al. 2012, 2013). Moreover, the curves shown in Fig. 5 are only valid for steady-state deceleration. The brake pitch or dive process delays wheel load transfer significantly – in contrast, there is practically no time lag in the transmission of brake force to the front wheel. Especially in the case of motorbikes with negative kinematic brake dive compensation (e.g., in the case of telescopic fork bikes) with consequently greater dive movement, there is a danger of front wheel locking, even at low brake pressures that the rider does not perceive as critical – with the consequence that a fall is practically inevitable. This phenomenon is known as dynamic over-braking of the front wheel (Weidele 1994).


Ideal brake force distribution for Opel Astra H car and Honda CBR 600 RR motorcycle (2010 C-ABS model), both fitted with experimental equipment and therefore retarded rear axle/wheel lift-off points, calculated on the basis of own measurements of centers of gravity
4 Motorcycle Accident Scenarios Relevant for Vehicle Dynamics Control Systems
Whereas the number of motorcyclists killed each year in Germany had remained more or less constant for 15 years at about 800–1,000, it fell significantly for the first time in 2008 to 656. With only a seasonal exception in 2011, when, due to a long spell of fine weather with an increase in motorcycle traffic, the accident figures unfortunately rose to 708 fatalities, this downward trend continued in subsequent years and in 2012 reached its lowest level of 586 fatalities. Despite this positive trend, over the long term the number of motorcyclists killed is falling much more slowly than the total number of road accident fatalities. Due to the huge increase in motorbike use in Australia and the USA over the last 10–15 years, the number of people killed is actually increasing in these countries (IRTAD 2013). The problem of front wheel locking in motorcycles described in the previous section – in combination with the danger of dynamic over-braking – suggests that a high proportion of accidents are braking related. Although the data available from Germany’s Federal Office of Statistics are not sufficiently detailed, this assumption is supported by numerous detailed studies over long periods of time (cf. Hurt et al. 1981; ACEM 2009). For example, German insurance company databases also include detailed descriptions of a large number of motorcycle accidents which, in terms of various criteria, are representative of the accident scenarios in Germany. The German Insurance Association (GDV) database includes a study (Sporner and Kramlich 2000) of 610 motorcycle/car collisions: There was evidence of braking in 239 of these accidents and in 45 cases the motorcycle fell over prior to the collision. In approximately 7 % of the cases evaluated, wheel locking contributed significantly to the course of the accident; even in the evaluation of single-vehicle accidents, falling off the bike was the primary cause of approximately 40 % of them. Overall, at least 20 % of motorcycle accidents can apparently be influenced by having ABS. In the database analysis conducted by Allianz insurance group (Reissing et al. 2006), it was similarly found that between 8 % and 17 % of the accidents investigated could have been prevented by ABS. In a total of 87 motorcycle accidents, DEKRA accident research (DEKRA 2010) determined that between 25 % and 35 % of accidents could have been prevented by ABS, and Bosch (Yildirim and Mörbe 2013) states that 26 % of accidents involving injuries or fatalities could have been prevented. This means that, translated to the current accident figures, between 46 and 205 fatal accidents could be prevented in Germany alone by the universal use of ABS on motorcycles. The latest studies from the USA (IIHS and HLDI 2013) confirm this prediction and show that, in a comparison of otherwise equivalent motorcycles, vehicles with ABS are generally involved 20 % less frequently in collisions – and 31 % less frequently in fatal accidents – than vehicles without ABS; motorcycles with a combined ABS (ABS and CBS, Sect. 5) were involved in collisions as much as 31 % less frequently. According to Bosch (Schneider 2013), 67 % of all cornering accidents, which constitute approximately 16 % of all motorcycle accidents, are potentially preventable with the curve-adaptive combination of an ABS with a traction control system, which is referred to as Motorcycle Stability Control (MSC, Sect. 6). Since riders braked too little or too late in many cases, the use of braking aids to increase the pressure more quickly, or even predictive systems such as “predictive brake assist” (PBA), promise further improvements. DEKRA tentatively assumes that between 50 % and 60 % of all relevant accidents could have been prevented (DEKRA 2010) and also that the severity of the unavoidable accidents could have been reduced by drastically reducing collision energy (Roll et al. 2009; Roll and Hoffmann 2010).
However, because of the uncertain nature of the data available, it is difficult to accurately determine the potential for future vehicle dynamics control systems that go beyond this. A related study (Gwehenberger et al. 2006) found that unbraked accident in curves were potentially preventable, which account for approximately 8 % of accidents. These are addressed in more detail in Sect. 8.2.
5 State-of-the-Art Brake Control Systems
Figure 6 gives an overview of the operating principle of hydraulic braking systems. Hydraulic motorcycle braking systems are based on a dual-circuit standard braking system with separate controls for front and rear brake. Operation of the handbrake generates a hydraulic pressure that is transmitted to the front wheel brake via hydraulic lines where it is converted into a clamping force. The same process is repeated when the rear wheel brake is operated via the footbrake or a second handbrake. Nowadays, disk brakes are primarily used as wheel brakes: Such braking systems are technically mature and universally used; however, without additional measures, they are not sufficient to meet the requirements of a modern braking system for motorcycles when it comes to avoiding wheel lock. In order to achieve a short stopping distance, it is up to the rider to modulate the pressure in the braking system, i.e., build up the braking pressure on the front wheel as quickly as possible, in keeping with the ideal brake force distribution – without causing the wheel to lock – and similarly build up the pressure as quickly as possible on the rear wheel, but then reduce it again because of the dynamic wheel load transfer during braking. This is the only way to guarantee a short stopping distance while maintaining the stability of the motorcycle. However, such a control task often proves too much for a motorcyclist, especially in emergency situations. This means that the vehicle is not slowed down optimally – either braking pressure is generally too low, built up too late, or with insufficient gradient – or the wheels are over-braked or even locked. This compromises the stability of the vehicle, and if a wheel locks up (especially the front wheel), this almost inevitably leads to a fall. In order to better replicate an ideal brake force distribution on the front and rear wheel, motorcycles with so-called combined brake systems (CBS) are commercially available.


Operating principles of hydraulic motorcycle braking systems
These are available in two versions (Fig. 6):
-
Single CBS, whereby manual control acts on the front wheel, foot control (or the second manual control) acts on the front and rear wheel; this means that relatively high deceleration can be achieved by using only one control element.
-
Dual CBS, whereby both wheels can be slowed down using either brake lever (the hand- or the footbrake).
Such systems have relatively complex hydraulics: Dual CBS uses a floating front brake caliper with an additional actuating cylinder, a so-called secondary master cylinder. By means of an additional hydraulic connection, this serves to build up pressure in the hydraulically partitioned rear wheel caliper. In both systems the front wheel caliper is hydraulically partitioned – e.g., five pistons connected to the manual control and one piston connected to the foot control – which pushes up the cost of the overall system even further. By supplementing this brake system with so-called pressure control and/or delay valves (PCV, DV), it is possible to adapt the brake pressure and force buildup as well as limitation on both wheels more exactly to the desired brake force distribution. Despite the general nature of the term PCV for all kinds of valve systems used to control the brake pressure, it is typically used to describe pressure cut-off valves in the rear brake circuit, while the term DV describes a special type of PCV used to delay pressure buildup at the front upon activation of the rear brake.
5.1 Hydraulic Antilock Braking Systems (ABS)
However, preventing locking up of the wheels and therefore maintaining stability can only be guaranteed by a system which modulates brake pressure by sensing traction so that if a braked wheel is threatening to lock, it can be speeded up again to maintain the lateral force. Figure 7 provides an overview of the operating principles of hydraulic ABS: This type of antilock braking system (ABS) has been available for cars since 1978. The first motorcycle ABS was introduced in 1988 on the BMW K100 and, following initial skepticism, has found increasing acceptance amongst motorcyclists, which is reflected in rising installation rates. In a dual-circuit braking system, the ABS is switched between actuation and wheel brake; it has wheel speed sensors to monitor the wheel speed. If the rotation speed of a wheel drops excessively during braking, this is sensed and the brake pressure is reduced via the brake pressure control. Once the wheel has regained the reference speed of the vehicle, the brake pressure is increased again to slow the vehicle down further. Nowadays, dual-channel systems using valves are very common; they are lighter and less expensive than antilock integral braking systems (cf. Sect. 5.2). The same principle applies to a single CBS-ABS, exept that an additional modulator circuit is needed to couple rear wheel actuation to the front wheel.


Operating principles of hydraulic motorcycle ABS braking systems
Such systems therefore require a total of three control channels that are controlled independently of each other. Dual CBS-ABS features the previously mentioned Dual CBS supplemented by ABS modulators. The system uses a total of four control channels, each being required to control brake pressure from manual actuation to the front wheel, foot actuation to the front and rear wheel, and from the secondary cylinder of the front wheel to the rear wheel, respectively. In the outlined antilock systems, pump/valve configurations, and occasionally also plunger systems, are used to regulate brake pressure.
Many vehicles on the emerging Asiatic market only have a hydraulic disk brake on the front wheel, so that inexpensive single-channel ABS are now available.
5.2 Electrohydraulic Integral Braking Systems
Pure ABS are passive, as they cannot generate a higher brake pressure than that applied by the rider. However, there are units from the automobile sector that are able to supplement ABS functionality by actively, i.e., autonomously, generating pressure on individual wheels. Based on this technology, electrohydraulic integral braking systems have been developed for the motorcycle sector; Figure 8 provides an overview of their operating principles.


Operating principles of electronic integral braking systems
Just like a CBS, when one brake circuit is activated, these systems can actively generate braking pressure in the other braking circuit without additional hydraulic connections or special measures in the caliper. Partially integral systems are restricted to acting on one brake circuit, while fully integral systems can actively operate on both brake circuits.
5.2.1 Integral Braking Systems Without Power Assistance
The state of the art is to use valve technology known from the automobile sector, which has been miniaturized over the last few years for use in motorcycles. A specialized version is the partially integral braking system, whereby the braking pressure is actively built up only at the rear; i.e., such a system creates an integrated function from the handbrake to the rear wheel. Below, the partially integral braking system from Continental serves as a functional example: The system consists of a total of six hydraulic valves (two for the front wheel circuit, four for the rear wheel circuit), three pressure sensors, a low pressure accumulator, and a hydraulic pump for each wheel circuit and an ECU (electronic control unit). The two pumps of each wheel circuit are jointly driven by an electric motor. A system overview is provided in Fig. 9. If the rider operates the handbrake, the pressure is hydraulically transmitted to the front wheel brake; at the same time the pressure sensor measures the pressure rise and transmits the information to the ECU. The pump motor (M) is controlled in accordance with prescribed characteristics, operating conditions or other variables. To actively build up the pressure on the rear wheel, the isolating valve (IV-RW) is closed and the electrical switch valve (SV-RW) is opened.


Motorcycle integral braking system MIB with partially integral function
The pump can then transfer brake fluid from the reservoir into the rear brake caliper and build up pressure. If the rider also operates the footbrake at the same time, the SV-RW is closed again when wheel braking pressure is reached and the IV-RW reopened, so that the rider once again has direct access to the rear wheel brake from the footbrake. In terms of valves, the front wheel circuit is designed as a simple ABS circuit.
5.2.2 Integral Brake Systems with Power Assistance
In order to reduce the brake operating forces necessary to reach high decelerations in the ABS control range even on heavier motorcycles, in 2000 BMW Motorrad produced the first braking system with “Integral ABS” (CORA BB) manufactured by FTE, which not only had the integral function but also brake power assistance (Stoffregen 2010). While, for a time, Piaggio and Peugeot used modified systems without locking protection at the rear wheel (CORA) in scooters, further development of valve-based ABS technology soon made power assistance obsolete. For example, at BMW Motorrad the valve-based technology of second-generation integral ABS (Sect. 5.2.1 and Stoffregen (2010)) succeeded the first as early as 2006, and in the last 2009 model, this was only available in the K1200LT.
Depending upon the stage of development of the FTE system, the hydraulics of the control elements are largely separated from the wheel brakes, and in an intact system, operation takes place in a simulator or control room. A hydraulic pump is activated by each actuation – even partial braking – so that the pressure can be built up in the wheel brake cylinder, at least in accordance with an amplification factor prescribed by hydraulic ratios. As a fallback in the event of system failures, the master cylinders of hand- and footbrake have a direct hydromechanical connection to the wheel brake cylinders. The absence of the power assist function consequently requires much higher operating forces, similar to those of a conventional brake. The ABS function works on the plunger principle, whereby a control piston is continuously displaced against the operating pressure in the control room by an electromagnet to modulate the wheel brake pressure. The integral function is produced via an additional hydraulic input, coming from the actuating element of the other brake circuit. This pressure acts on the control piston via a dividing piston, and the minimum integral brake pressure is adjusted at the respective wheel brake by the geometric relationships, as in a normal braking operation. While the electromagnet can be used to counteract the actuation at the control piston – i.e., in order to diminish the resulting brake pressure in accordance with dynamic wheel load transfer and in approximation of an ideal brake force distribution – the pump is used to generate additional brake pressure, all electronically monitored by pressure sensors.
5.2.3 Honda Combined ABS: “Brake by Wire”
Honda is following its own route with the Combined ABS (C-ABS) presented for the supersport sector in 2008. The center of gravity of supersport motorcycles is quite high relative to their short wheelbase. Hard braking maneuvers give rise to correspondingly large wheel load transfers and consequently considerable diving movements with a rapid tendency towards braking-related pitching, which has a destabilizing effect upon vehicle dynamics, especially when reducing speed coming into curves. Experimental investigations show, first of all, that the disruptive suspension reaction can be predicted from the brake pressure gradient set by the rider and the wheel speed information and, secondly, can be minimized by briefly increasing the front wheel slip and by early triggering of ABS control (see Nishikawa et al. (2008), cf. also Sect. 5.3). A “brake-by-wire” architecture was chosen to implement this strategy with rapid brake pressure buildup, independently of the rider.
The system is divided into five components: Apart from the electronic control unit (ECU), an equivalent valve unit and power unit are integrated into the hydraulic line of the handbrake and footbrake, respectively. Although this means that they can be mounted on various types of vehicles in a way that is favorable to the center of gravity, it comes at the price of a comparatively high system mass of around 10 kg.
For braking maneuvers when switched off, the system works like a conventional dual-circuit brake system, which also serves as a fallback in the event of failure. In the active system, when a low brake pressure threshold is exceeded, the hydraulic connection of the brake lever to the wheel brakes is isolated by switchover of valves and diverted to force/displacement simulators that imitate the feel of a conventional brake at the lever. The rider’s desired deceleration is detected by brake pressure sensors and processed in the ECU. Via spur gears and ball screws, electric motors in the power units drive separate master cylinders, which build up the pressur at the wheel brakes. ABS control is based on conventional wheel speed sensors but is continuous, without the otherwise characteristic pulsing.
The system allows to produce arbitrary brake force distributions and possibly even an amplification function with many degrees of freedom: For example, the rear wheel is always braked in advance, and when the brake is released, a different brake force distribution is applied than during actuation (Nishikawa et al. 2008), which is not immediately possible with a conventional hydraulic CBS.
Although the system does not have a roll angle sensor, the control of large pitching motions and the smooth ABS control already allow an astoundingly good performance during corner braking, even at larger roll angles (cf. Sects. 8.1 and 5.3.1). This is impressively confirmed by its successful use in racing events (Tani et al. 2010).
5.3 Additional Functions
The so-called rear wheel lift-off protection (RLP, often also referred to as “rear wheel lift-off/lift-up mitigation”) effectively reduces the risk of brake flip-over and is already used in many simple dual-circuit ABS. RLP compares the wheel speed signals and signals derived from both wheels during braking. In addition, pressure information from the individual control circuits – and, in the latest systems, even the pitch rate and longitudinal acceleration (Bosch 2013a) – can be processed to give a lift-off tendency and limit deceleration as a function of the driving situation. There is no direct sensing of the distance between the wheel and the road surface. The pressure control algorithm of the front wheel reduces braking pressure – even below the ABS control threshold – in such a way as to guarantee a minimum contact force of the rear wheel as surely as possible.
The “active brake pressure distribution” (ABD, also called eCBS – electronic CBS) is responsible for distributing the rider’s desired braking to both wheels. This happens in interaction with the brake pressure directly induced by the rider via the two control elements, whereby the individual allocations – from the handbrake to the rear wheel and from the footbrake to the front wheel – are being converted by the software. The basic characteristic can be based on the ideal brake force distribution and then altered in keeping with the riding situation: It uses input variables such as vehicle speed and also the signals describing the rider’s braking profile. In this way, for example, the integral action of the rear wheel brake on the front wheel brake can be reduced at very low speeds to prevent deflection of the steering during a turning maneuver. However, an ABD also requires an active braking system (e.g., Bosch ABS 9 ME, Continental MIB, FTE CORA BB, or Honda C-ABS). Consequently, with these, it is also possible to have a function such as motorcycle Hold & Go (MHG), to actively assist the rider with hill starts.
Apart from providing special operating modes for racing and off-road use, there is a trend towards extending the function by adding additional sensor information about driving conditions (Sect. 5.3.1) and interaction with other control systems such as traction control (Sect. 6) or suspension regulation (Sect. 7).
5.3.1 Curve Adaptive Braking System
The central requirement for brake control in curves is to safeguard vehicle stability, which is particularly delicate in this situation (Sect. 3). At the same time as achieving high decelerations, it is always necessary to ensure that there is an adequate lateral force reserve available. Sudden friction variations from high to low and low friction coefficients in general place physical limits on this (cf. Seiniger (2009) and Sect. 8.2). Also, because of the coupling of steering and rolling dynamics, it is important to control brake steer torque (Sects. 3 and 8.1).
In particular by taking account of the roll angle as a characteristic parameter, the braking strategy can be adapted to the specific requirements of corner braking. Although it is not possible to expand the vehicle dynamic potential imposed by the abovementioned limits, it can be made usable to a greater extent by making it easier to manage for the rider.
The resulting safety gain is illustrated below using the example of corner braking with conventional integral ABS, followed by a presentation of various control strategies and the first curve-adaptive brake system that was introduced in 2013 as part of Motorcycle Stability Control (MSC) (Bosch 2013a) in Bosch and KTM standard production.
Figure 10 shows the course over time and the consequences of impending wheel lock during corner braking: At t = 0 s, a roll angle of approximately 20° and a driving speed of 65 km/h, the front wheel displays a clear drop in rotation speed. Because excessive demands are placed on traction, its slip angle increases, while the yaw rate of the vehicle and the curvature of its course decrease. At the start of incipient wheel locking and the subsequent ABS control action, braking force drops. The outward steering torque applied by the rider to balance the formerly higher level of brake steer torque turns the handlebars further outwards. At the end of the control operation, the maximum braking force is reestablished at the front wheel and therefore also a strong inward brake steer torque, which – with the steering effort obviously taken back by the rider – again turns the handlebars significantly inwards. Temporarily, the handlebars start to oscillate, and when sufficient amplitudes are reached, a rapid drop in roll angle and associated high roll rates are observed. This is followed by obvious yawing and rolling oscillations of the vehicle during the rest of the braking process. Under certain circumstances in real road traffic, this can result in the vehicle departing from its designated lane. The steering and rolling oscillations are caused by the effect of brake steer torque (Sect. 3) in combination with the kinematic instability (Sect. 3) of the vehicle and control of its course by the rider.


Sequence of ABS control during corner braking with conventional integral ABS (BMW R1150RT, cf. Seiniger et al. 2006)
Apart from the steering, rolling, and course disruptions caused by brake steer torque, the example also shows the tendency towards destabilization by placing excessive demands on the available traction. While research is currently being carried out to develop a chassis with dynamically adjustable steering axis to combat brake steer torque (Sect. 8.1), the measures described in the following section are also known for improving corner braking with a conventional chassis.
In order to avoid dynamic front wheel over-braking, which is particularly critical when cornering, to control brake pitch and, above all, to give the rider a bit more time at the start of braking to compensate for brake steer torque, it lies at hand to limit the brake force buildup gradients and possibly also the maximum braking pressure, as a function of the roll angle. The kinematic instability can furthermore be taken into account by using roll-angle-dependent slip thresholds (Roll and Hoffmann 2010): These facilitate more sensitive ABS control, including a compensation of so-called pseudoslip, which results from the typically different widths and contours of the front and rear tires. A brake force distribution that is increasingly directed towards the rear wheel with increasing roll angle (Weidele 1994) not only increases the lateral force reserves at the stability critical front wheel by reducing its braking force, but simultaneously reduces brake steer torque. If, in addition, the rear wheel is over-braked early, it is possible to estimate the prevailing traction level. Nevertheless, due to premature ABS intervention at the back end, this can also trigger yawing, steering, and course interferences. However, these are typically not critical and are offset by the advantage that limiting the maximum brake pressure at the front means that ABS-related steering torque disruptions and their consequences can be avoided. Finally, the brake system should prevent the rear wheel from lifting off or even a brake flip-over, even during cornering.
Following the introduction of a roll angle sensor for traction control systems into standard production in 2009 (cf. Sect. 6), using this information for curve-adaptive braking control was only a matter of time. The braking system presented by Bosch in 2013, in conjunction with KTM, in connection with Motorcycle Stability Control (MSC, Bosch 2013a), uses a sensor cluster, which measures two rotation rates and accelerations in all three spatial directions. Because its installation position is turned through 45° around the transverse axis, one rotation rate sensor measures the pitch rate, while the other measures a combination of roll and yaw rate. Information can therefore be mathematically obtained about all six degrees of freedom of movement of the vehicle, especially the roll and pitch motion, taking into account the brake force distribution (eCBS, at KTM currently only with active pressure buildup at the rear), ABS control, as well as rear wheel lift-off detection and mitigation (Bosch 2013a; Yildirim and Mörbe 2013; Willig and Lemejda 2012).
Because of the current lack of published information about the practical implementation of the MSC strategy, the last sentence is deliberately tentative. While the abovementioned roll-angle-dependent braking strategies in MSC can principally be refined in several ways, because of the additional sensor information available, this is not always necessary to represent a particular function. For practical application, it is necessary to decide whether, for example, the improvement in rear wheel lift-off mitigation by taking account of pitch rate and longitudinal acceleration (Bosch 2013a) justifies the additional efforts to assure functional safety under all circumstances, as opposed to the conventional approach.
As the term Motorcycle Stability Control already suggests, the overall system goes beyond the function of corner braking control alone. By including engine control, it also allows curve-sensitive traction control (motorcycle traction control, MTC), optionally with additional functions such as launch or wheelie control (Sect. 6). Special off-road mappings not only work with adapted slip thresholds but also without taking account of the inertially measured roll angle, since this suggests reduced traction potential when riding through banked curves, whereas traction potential is in fact increased by the centrifugal force. Also, in the sense of a scalable system architecture, networking with additional control systems, such as a semi-active suspension (Sect. 7), is already prepared (Yildirim and Mörbe 2013).
The accident statistics relating to road use show that the gain in stability during braking achieved with measures such as MSC is more important than the loss of maximum deceleration theoretically associated with it. Initial practical trials show that the righting motion during corner braking with MSC is well suited to the deceleration and, thanks to the improved stability during emergency braking when cornering at large roll angles, a rider can most probably even achieve higher average decelerations than with a conventional braking system (Schneider 2013, 2014).
In multitrack tilting vehicles such as the Piaggio MP3 scooter, brake controls based on electronic stability control (ESC) from the automobile sector are also feasible, ideally also taking influence via engine control (Roll and Hoffmann 2010).
6 State-of-the-Art Traction Control Systems
In view of the high performance of modern motorcycles, a traction control system, is an expedient addition to the brake control systems that have now become established (Reissing et al. 2006). The primary aim is to prevent excessive rear wheel spin, in order to assist the driver during acceleration – especially on roads with varying or reduced friction coefficients – and at the same time to maintain vehicle stability. Especially when cornering, it is important to prevent uncontrolled sideslip with the risk of a highsider accident (see also Sect. 8.2).
Honda pioneered the series production of traction control systems with their TCS in 1992. BMW delivered further milestones with its Automatic Stability Control (ASC) in 2006 and Dynamic Traction Control (DTC) in 2009. Other manufacturers have since caught up. Because the operating principle of the various systems is essentially the same, this is explained below, initially using the example of ASC and DTC and supplemented as necessary.
Figure 11 shows an overview of the DTC system components networked via CAN bus. In addition to the throttle valve actuators of “eGas” (or “ride by wire”), DTC is enhanced relative to the ASC system to include a sensor box. By measuring the roll and yaw rate, as well as the lateral and vertical acceleration, this allows the driving conditions, which are largely characterized by the roll angle, to be captured by sensors and included in the control.


System overview of DTC using the example of BMW S1000RR
In both systems, the traction control algorithm runs on the engine control unit and, in DTC, so does evaluation of the sensor box signals. In order to determine the timing and intensity of a control intervention, the control unit receives the signals from the ABS wheel sensors. The prevailing drive slip is determined from the speed difference between the front and rear wheel – and also, in the case of DTC, a correction based on roll angle.
Specific vehicle parameters – including the characteristics of the wheel-tire pairings approved for the respective vehicle – are stored in the control unit for this purpose. Since tires from different manufacturers differ slightly in terms of rolling radius and contour, manufacturing tolerances and increasing wear with use, deviations are automatically adjusted to the basic data in defined driving conditions by comparing the wheel speeds.
If the determined drive slip exceeds a reasonable value for ensuring vehicle stability, the control system intervenes by reducing the drive torque. Apart from the cycle time of the calculation algorithm (usually 10 ms) and recognition time (approximately 50 ms), the response times primarily depend upon the time between two work cycles (short for a large number of cylinders and high engine speed) and the actuator used for the control intervention (see below). They are typically in the range of approximately 50–160 ms, but can be shorter for an inline four-cylinder during racing or longer for a two-cylinder boxer revving at a leisurely pace.
Whereas, thanks to the sensing of driving conditions, DTC can operate very close to the physical limits as suitable for racing, establishing the ASC thresholds requires a greater compromise between sporty and safe control. Implementation is via speed-dependent threshold values, which operate reliably for all roll angles encountered during riding. The consequence of this is that, at greater leans (λ > 40°), acceleration capacity can decline noticeably with ASC.
Although, in principle, an intervention to reduce drive torque at the rear wheel can be made or supported by an active braking intervention by the ABS (Roll and Hoffmann 2010), in the commercially available systems, it is done exclusively by reducing engine torque.
The basic control strategies for this are illustrated in Fig. 12.


Schematic diagram of torque reduction
Starting from an ideal ignition point for the given engine load, in a first step, the firing angle is retarded, reducing the engine torque by up to 25 %. The retarding of firing angle increases the exhaust temperature and is limited by the engine’s combustion limit. Further retarding would mean that the fuel is no longer completely burnt. Therefore, a maximum limit value for ignition retarding is stored in the control unit for each operating point. If the drive slip at the rear wheel is still too high, despite maximum ignition retard up to the combustion limit, fuel injection is then restricted. This is done for selected cylinders using special restrictor patterns in various reduction stages. A further continuous reduction in engine torque is possible within the reduction stages by varying the ignition point to retarded ignition points. When the combustion limit is reached once more, the engine control unit switches to the next reduction stage: This means that further injections are prevented for each work cycle (second and third reduction stage). In the final reduction stage, injection is completely suppressed, so that the engine only continues to run in towing mode. In the case of vehicles with eGas, it is also possible to superimpose these interventions by adjusting the throttle valves and intake airflow as a slightly less reactive control channel. To prevent the engine from stopping and the rear wheel from locking up, depending upon the engine design, the torque reduction is suppressed below an engine speed of approx. 1,200–1,800 min–1. In this speed range (approx. 5–15 km/h, depending upon active gear), keeping the engine running is just as important to maintain vehicle stability and is therefore prioritized over a reduction in drive torque.
The transitions into the reduction stages to reduce drive slip are adapted to the riding and slip conditions. Resetting, on the other hand, takes place as quickly as possible so as not to restrict acceleration capacity unnecessarily.
Additional features already possible with the ASC or similar traction control systems are the detection and prevention of acceleration-related front wheel lift off (so-called wheelies) or even backward flip-overs, as well as the adaptation to off-road vehicles. If the rider causes a wheelie by accelerating hard, the front wheel necessarily slows down relative to the rear wheel. The ASC recognizes this as rear wheel slip and reduces the drive torque. The slip thresholds for roads are often not suited to off-road use. Therefore, additional off-road adjustments have been developed to take into account the particular slip characteristics of loose terrain such as sand and gravel with higher threshold values. It is possible to switch between the setups or even turn the system off.
The control function of the DTC system that is suitable for racing is adjustable between four different modes (“rain,” “sport,” “race,” and “slick”). The latest version of DTC (such as in the BMW S1000RR HP4) provides the so-called Launch Control via a sensor with additional measurement of longitudinal acceleration in combination with a gear shifting assistant. This allows maximum acceleration from standstill with “suspended” front wheel, as in a racing start. In addition, the “Race Calibration Kit,” which is offered as an accessory, provides the option for individual fine-tuning.
While sensory measurement of the driving conditions in high-end systems such as DTC or Bosch MSC/MTC (Sect. 5.3.1) provides the preconditions for further additional functions – such as targeted drift control or even a “Wheely Automatic” – there are far simpler systems on the market. These are typically offered for racing purposes, sometimes even as an add-on, and are often restricted to sole monitoring of the rear wheel. From the rotation speed, gear, throttle position, and increase in rotation speed, the stored algorithm detects an unusually large increase in rear wheel rotation speed and, in the same way as ASC, intervenes via the engine management system.
7 State-of-the-Art Suspension Adjustment Systems
Unlike in a car, rider, passenger, and additional loads can easily represent 50 % or more of the overall mass of the motorcycle system, which has a significant influence upon the center of gravity and driving behavior. Simpler conventional suspensions therefore offer a manual adjustment of the rear spring preload, while more elaborate designs include adjustable spring preload and damping in the rebound and compression stages on both wheels. Systems such as BMW’s Electronic Suspension Adjustment (ESA) provide this electromechanically at the push of a button. A second generation (ESA II) even offers variable spring stiffness by series connecting the steel spring with an elastomer spring. Whereas, for safety reasons, load adjustment can only be made at standstill, damping can be adapted to the road surface and driving mode in preset characteristic curves while the vehicle is moving. Since 2012, semi-active suspension technology known from the automobile industry has also been used in motorcycles.
By means of constant sensory measurement of the driving conditions and adapting damping to the situation, semi-active suspensions (SAS) should reconcile the conflict between sportiness and road safety (measured, e.g., by improved road contact due to reduced variations in wheel load) and comfort (measured, e.g., by lower vertical accelerations of the sprung mass).
So-called Continuous Damping Control (CDC) from ZF/Sachs, which uses electrically controlled proportional valves for variable damping, is currently the most widely used system. Despite their common technical basis, the design of the systems from the various manufacturers differs in terms of the type and number of sensors used, amongst other things, and consequently the control strategy also. Alongside spring travel sensors (e.g., BMW, Aprilia), or acceleration sensors on wheel carriers and superstructure (Ducati), pressure sensors are also used on the front fork (Aprilia) to detect chassis movements. Additional information about driving conditions (accelerations, braking, cornering, etc.) is available through networking with other control systems. Whether they go under the name of Dynamic Damping Control (DDC) or Dynamic ESA at BMW, Ducati Skyhook Suspension (DSS), Aprilia Dynamic Damping (ADD), or something else, what these systems all have in common is the trend towards increasing system integration – in the sense of Global Chassis Control (GCC) or Integrated Chassis Management (ICM). This means that the engine control unit, traction control, braking control, and semi-active suspension do not just coexist, operating as individual systems, but rather that their control activities are increasingly being coordinated to suit the driving situation.
For example, it was demonstrated in a road test with a car (BMW X5) that stopping distance could be shortened by 1.2 % by coordinating CDC and ABS (Reul 2011). A simulation study with a sport touring motorcycle even found a potential reduction in stopping distance of 2–4 % (Wunram et al. 2011).
Furthermore, SAS can also have a positive influence on the course of highsider accidents by stiffening the damping of the superstructure and discharging the preload energy stored in the springs, thereby also diminishing the typical “catapult effect.” With their comparatively high damping forces – even at low damper speeds and system response times of below 15 ms over the entire adjustment range – electro-rheological dampers offer the best preconditions for this (Funke et al. 2010).
While semi-active suspensions can only influence the damping forces against the direction of motion of the wheel suspension, fully active systems allow adjustment of forces in both directions. However, from a physical perspective, even a highly dynamic fully active suspension such as that offered by BOSE (BOSE 2004) can hardly assist the rider in terms of stabilization (Seiniger 2009). Nevertheless, it is reasonable to assume that, by facilitating improved handling, SAS supports the rider’s ability to stabilize the vehicle. It is also likely that the proven gain in comfort (Wunram et al. 2011) will have a beneficial effect, in that the rider will not tire so easily and will have greater confidence in the abilities of the machine. Ultimately, also a more relaxed rider is an important contributor to the active safety of the whole human-machine-environment system.
8 Future Vehicle Dynamics Control Systems
By taking account of the driving conditions (especially the roll angle) in braking and traction control systems, possibly even combined with a semi-active suspension, the driver assistance systems currently available on the market already cover a large number of driving situations. In order to assess the feasibility of more advanced vehicle dynamics control systems, first of all the question of relevant accident categories must be examined. Apart from cornering accidents in general (cf. Schneider 2013; Kühn 2009), a detailed analysis of the accident database of the German Insurance Association (GDV) – and expert consultations – indicated that unbraked cornering accidents constitute by far the largest group of accidents that is potentially still possible to influence (Seiniger et al. 2008).
As already mentioned in Sect. 4, the use of predictive systems – such as “predictive brake assist” or even “autonomous emergency braking” (AEB) – bears considerable potential to prevent accidents where there was no braking or the brakes were applied too little or too late, or at least to reduce their severity (cf. DEKRA 2010; Roll et al. 2009; Roll and Hoffmann 2010).
These systems, based on suitable environment sensors, do not assist with stabilization on their own but require special measures to keep the vehicle on a stable course in the event of an autonomous intervention. Thus the investigation of rider coupling and its dynamic interaction with the vehicle and control systems should play an important role in the future.
8.1 Potential Ways to Influence Braked Cornering Accidents
In addition to the curve-adaptive braking system recently introduced into series manufacture along with MSC by Bosch and KTM (Sect. 5.3.1), the so-called brake steer torque avoidance mechanism (BSTAM, in German: Bremslenkmomentverhinderer, BLMV) from Weidele (cf. Weidele 1994; Schröter et al. 2010, 2012, 2013) is a further option for beneficially influencing cornering accidents with braking-related righting behavior (Sect. 3).
In simplified terms, the operating principle of the brake steer torque avoidance mechanism is that the kinematic steering axis is shifted respectively inclined sideways so that its projection always runs through the front tire contact patch in the frontal view of the vehicle (see Fig. 13b, c as well as Fig. 14). A brake force acting there consequently no longer has a lever arm to the steering axis, does not generate any disruptive brake steer torque (BST), and therefore has no righting of the vehicle either.


Steering bearing positions, kinematic steering axis, and (partial) compensation of the (tire) scrub radius (SR) for standard steering and various configurations of a brake steer torque avoidance mechanism (BSTAM)


Changes in chassis geometry and operating principle of brake steer torque avoidance mechanism according to Weidele (1994) using the example of the Honda CBR 600 RR test vehicle
However, such a system also interferes with the chassis geometry, which, especially in the case of modern sports bikes, is designed for a practically steering torque neutral behavior during free cornering. It is of crucial importance that the normal and lateral forces acting at the front tire contact patch also have lever arms to the steering axis: Lateral forces turn the steering outwards via the trail, and normal forces turn it inwards, while both turn it outwards via the tire scrub radius.
If the tire scrub radius is eliminated by a brake steer torque avoidance mechanism with a parallel offset steering axis (in its original plane tilted around the steering head angle τ, Fig. 13b), this outward steering torque component is lost, and the rider has to apply a much higher steering torque during free cornering. Although this can theoretically be controlled by a greatly increased steering head angle (for the test motorcycle, e.g., approximately 50° instead of 23°55′) in combination with similarly increased fork yoke offset (e.g., 140 mm instead of 30 mm) and only partial compensation of the tire scrub radius, this would seriously compromise handling characteristics. The more elegant option, which retains the basic geometry, consists of lateral steering axis inclination: This gives the outward effect of the side force a higher weighting than the inward-turning normal force, so that, despite complete compensation of the tire scrub radius, the original balance is restored (Fig. 13c). The geometry of the basic chassis defined by the steering head angle, fork yoke offset, and tire dimension establishes the kinematically optimum instantaneous center of steering axis inclination at the intersection of the standard steering axis with the vertical running through the front wheel hub (Fig. 14) in upright vehicle position. Regardless of the lateral inclination angle of the steering axis, this allows free cornering with the same steering torque requirement as for the standard setup. However, during corner braking with complete compensation of the tire scrub radius (Fig. 13c), this setup produces a steering torque requirement that decreases with increasing deceleration – whereas a rider who is used to conventional vehicles would intuitively expect the opposite, that is to say an increasing steering torque requirement. This familiar feedback can also be restored by reducing the steering axis inclination angle and therefore only partially compensating the scrub radius (Fig. 13d).
However, the practical implementation of such a system presents two major challenges: First of all, there is the previously described optimized instantaneous center of rotation for standard chassis parameters and tire dimensions below the wheel hub (approx. 74 mm in the case of the test motorcycle with a front tire of the typical dimension 120/70ZR17; see Fig. 14). The obvious design of the brake steer torque avoidance mechanism based on hub-center or king-pin steering therefore necessarily brings the disadvantage of greater tire-sprung mass. Using other suspension/steering systems theoretically allows to avoid this by lateral adjustment of both steering bearings outside of the wheel’s circumference. Practically, this necessitates large adjustment ranges, bringing downsides in construction space, design, and surplus mass; however, this time of superstructure sprung mass. Secondly, the wheel inertia must always initially be decelerated at the start of braking, before brake slip and braking forces can be generated. The required steering axis inclination angles of up to 14° give rise to outward steering torque components. With an estimated value of 10 Nm, these theoretically constitute a serious conflict to the aim of reducing brake steer torque. However, since they only occur in the first approx. 0.1–0.2 s of braking (cf. Fig. 15b), it is reasonable to assume that, in practice, they can be controlled by an appropriate buildup in brake pressure.


Course over time of characteristic measurements during corner braking with and without brake steer torque avoidance mechanism (R = 50 m, v0 ≈ 18 m/s, ay0 ≈ 6 m/s2, ax ≈ 5 m/s2)
In order to investigate driving behavior in real riding experiments, a Honda CBR 600 RR supersport motorcycle (2010 model, including C-ABS, Sect. 5.2.3) was fitted with a brake steer torque avoidance mechanism (Fig. 14). The steering head bearings are kinematically designed as spherical joints (using spherical roller bearings), whereby the upper steering head bearing is electromechanically adjustable via a double excentric construction (Weidele 1994; Schröter et al. 2010). Since the construction space is severely restricted by the legs of the telescopic fork, excentricity is just 8 mm. Essential changes in steering head angle and trail therefore remain as small as the tilt angle of the steering shaft of around 2° (Figs. 13e and 14). The overall steering torque requirement of the real system is therefore similar to that of a parallel brake steer torque avoidance mechanism (Fig. 13b) with correspondingly reduced compensation rate. This gives rise to a significantly increased steady-state steering torque, a reduced steering torque jump at the start of braking – with only slight disruption due to slowing of wheel inertia – and consequently also only slight steering, rolling, and course deviations.
By way of an example, Fig. 15 shows the courses over time of some characteristic measurement variables during braking under typical rural road conditions with an average deceleration of around 5 m/s2 from a speed of approximately 18 m/s (initial lateral acceleration ay0 ≈ 6 m/s2, initial roll angle λ0 ≈ 35°) in a left-hand turn with a radius of R = 50 m for the standard suspension and active brake steer torque avoidance mechanism (in both cases without the standard HESD steer damper, Sect. 2).
When traveling with conventional steering geometry and centered steering axis (Fig. 15a), after the obligatory disengagement of the clutch, the rider applies a constant steering torque of 7–9 Nm towards the outside of the curve (negative in value). At the start of braking (t = 0 s), a jump in steering torque of around 19–20 Nm can be observed (t ≈ 0.2 s). The proportion of the suddenly increased overall steering torque demand which is not immediately covered by the rider’s steering effort accelerates the steering system rotationally towards the inside of the curve (see positive steering rate), and the subsequent righting motion allows the roll angle (negative in left-hand curves) to drop significantly below the ideal value for the speed and curve radius. From this point on, the overall steering torque demand is already significantly reduced by a superimposed gyroscopic steering torque component on the more upright vehicle position and is once again in balance with the rider’s effort. The oscillations in the measured steering torque resulting from coupling of steering and rolling dynamics decay with the further declining steering torque requirements until the end of braking. In order to support the motorcycle at standstill, towards the end of braking (from t ≈ 2.5 s), the rider takes both legs off the footrests, one after the other, and makes compensating steering and upper body movements to maintain balance. This causes disturbances in the measurements of steering angle and torque as the rider steadies himself on the handlebars.
Compared with the standard steering, corner braking with brake steer torque avoidance mechanism (Fig. 15b) starts with a much higher constant steering torque in the order of 24–25 Nm (as opposed to 7–9 Nm at t = 0 s). Apart from an expected small disruption due to inertia of around 1–2 Nm at the start of braking, there is a steering torque jump of only 3 Nm (compared with 18–20 Nm at t ≈ 0.2–0.3 s), so that brake steer torque only causes a negligible steering angle disturbance and the roll angle initially follows the reference very closely. Because the simple control algorithm that has been chosen with constant compensation ratios that ignore additional effects upon steering torque, the brake steer torque is overcompensated from the middle of braking onwards and the steering torque demand changes sign (from t ≈ 1.4 s). The roll angle remains greater than the reference value and the bike decreases its turning radius (t ≈ 2 s); that would be a significant advantage in a narrowing radius turn. However, in the illustrated example, the curve radius is constant so that the rider has to steer harder into the curve (t ≈ 2–2.5 s), in order to follow it. Although a glance to check the mechanics tilts the rider’s upper body further inwards, the roll angle no longer fully approximates to the ideal value because of imminent standstill.
In conclusion it can be stated that the prototype brake steer torque avoidance mechanism effectively reduces the steering torque jump and the associated steering and righting movement at the start of braking. In contrast to MSC (Sect. 5.3.1), the almost complete prevention of brake steer torque offers advantages for course corrections “on the brake” and in respect of future systems such as predictive brake assist or autonomous emergency braking.
While it would be relatively simple to allow for the previously illustrated change of sign of steering torque via a variable compensation ratio (e.g., as a function of the roll angle, deceleration, or brake pressures) and the disruptive effects of slowing wheel inertia seem to be controllable via limited brake pressure gradients, there are obvious disadvantages to the mechanical complexity and weight of the system. Moreover, it is to be expected that optimization of high-speed stability and handling characteristics, which have currently only been rudimentarily investigated, would require a high development effort. From a current perspective, it therefore seems a better solution to predict the brake steer torque on the conventional chassis based on sensor data and counteract it, for instance, via an electrical actuator or targeted control of a semi-active steering damper. With their comprehensive sensor setups and control, modern brake systems such as C-ABS (Sect. 5.2.3) and MSC (Sect. 5.3.1) offer the best preconditions for this.
8.2 Potential Ways to Influence Unbraked Cornering Accidents
The largest group of accidents that can potentially still be influenced is unbraked cornering accidents (Seiniger et al 2008). Typically they occur as a result of a sudden drop in road surface friction (e.g., due to leaves, slippery asphalt, sand, or ice) or exceeding the maximum possible lateral acceleration. In both classes of accident, the lateral acceleration drops and no longer “suits” the roll angle as required to maintain stability through roll equilibrium; a fall is the inevitable result. In order to influence these two accident categories with a technical system, it must firstly be possible to detect them by sensors and secondly to influence them by technical measures.
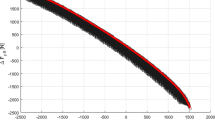
Experiments and simulations have shown that the sideslip speed of the vehicle (speed of the change in vehicle sideslip angle) is a reliable criterion for detecting critical driving situations. In normal driving situations, the slip of the motorcycle tires is usually low; even the sideslip angle is small. Sideslip speed is therefore limited. However, in critical driving situations – when both wheels skid – the sideslip of the vehicle is unstable. In order to prove the suitability of sideslip speed as a criterion, unbraked cornering accidents were simulated on a low friction surface with a specially equipped motorcycle. The sideslip speed of a vehicle is
with the road surface-related (leveled) variables, yaw rate \( \dot{\psi} \), lateral acceleration ay, and vehicle speed v. Direct measurement of road surface variables is not possible for motorcycles for two reasons:
-
The sensors mounted on the vehicle also tilt into the curve.
-
Roll speed and acceleration cause additional inertial forces acting in the sensor so that correction is necessary.
Fixed sensors for yaw rate, roll rate, lateral acceleration, vertical acceleration, and roll angle are required on motorcycles to determine sideslip speed. Figure 16 shows the course of sideslip speed during a typical accident of the “friction coefficient step” category. The front wheel of the motorcycle contacts the low friction surface at time t = 0 s: There is a small deflection in sideslip speed, which is, however, obviously corrected – because the rear wheel is not slipping, the vehicle is initially still stable. At time t = 0.2 s, the rear wheel is also on the slippery surface and the vehicle is noticeably building up sideslip speed. And so the “friction coefficient step” class of accident progresses in two phases: Each phase is characterized by incipient sliding of a wheel. In the “exceeding maximum lateral acceleration” class of accident, both wheels start to slide at approximately the same time. The expected maximum sideslip angle of the vehicle for a large roll angle is around 2°, and the expected maximum sideslip speed of the motorcycle is around 0.15 rad/s for stable driving situations. In each driving test evaluated, the sideslip speed limit was exceeded during the falling over phase: Under no circumstances was the limit exceeded during noncritical driving situations. Critical driving situations can therefore be detected from the sideslip speed. It is conceivable that in future Kalman filters, similar to those used in the ESC system for cars, can be used to determine the sideslip angle and improve detection of critical driving situations.


Course over time of sideslip speed during a friction jump. Contacting the slide surface at a time t = 0 s
However, the aim of a vehicle dynamics control system is not only to detect but also to stabilize the critical driving situation. Roll instability obviously very quickly results in the vehicle falling over by exceeding the geometrical roll angle limits. In contrast to a yawing motion, which does not restrict the duration of the critical driving situation, as long as there is sufficient road space available, the rolling motion limits the time available to stabilize the vehicle. The primary aim of a vehicle dynamics control system must therefore be to stabilize the roll angle (Seiniger 2009; De Filippi et al. 2011b). When it comes to a fall for the case in point, the yawing motion is initially what is required – a vehicle turning into the curve, already skidding on the road and turning away from the skidding rider. A vehicle skidding on the road surface and turning out of the curve would push the rider ahead of it. Because the skidding bike has a much lower friction coefficient than the rider’s usual protective clothing, this would increase the skid distance and therefore also the risk of injury to the rider. In the case of irreversible destabilization, sideslip speed turning into the curve is far preferable (over-steering). Yaw instability is critical, if the still skidding vehicle enters into an area of high friction with one or both wheels: The wheels then contact a gripping surface with a greatly increased slip angle, thereby producing far too great side forces, which usually causes the vehicle to tip over on the outside of the curve (highsider accident). This often happens so quickly that the rider is unable to stabilize the vehicle. Moments of a three-figure Nm range around the steering system are expected for front wheel transition from a low friction to a high friction surface: Depending upon the coupling of the rider and the elasticity in the steering system, these moments can result in kickback; furthermore, turning of the handlebars towards the outside of the curve can result in a reduction in the side force due to the negative sideslip angle at the front wheel. For negative sideslip values, the side force is less than that required to counteract the tipping moment. Hence, a vehicle dynamics control system must aim to limit the sideslip angle at the front wheel in the phase of transition from low to high friction to values of 0° in order to prevent kickback. In a conventional bike, too much side force at the rear wheel cannot be adequately dissipated by steering movements and results in the previously mentioned highsider accidents. Large sideslip angles at the rear wheel must therefore be prevented when transitioning from low friction to high friction surfaces. As a potential measure to influence the vehicle dynamics, the tire forces can principally be varied.
The yawing rotation of the vehicle can be influenced by targeted brake interventions and/or the use of highly dynamic active suspensions: This means that a control system to avoid highsider accidents with high to low to high friction variations is feasible.
Apart from using multitrack tilting wheel technology, e.g., in the Piaggio MP3 (Roll and Hoffmann 2010), it is not possible to make a vehicle dynamics control system for single-track vehicles similar to the electronic stability control (ESC) system from the automobile sector with the abovementioned measures, because of the rolling instability of the system (Seiniger 2009) or – even if there is adequate traction available – only within very limited boundaries (De Filippi et al. 2011b).
8.2.1 Roll Stabilization by Double Gyroscope
However, a possible means of roll stabilization is a double arrangement of gimbaled gyroscopes – invented for single-track trains already at the beginning of the twentieth century. The setup has been further developed by the American company LIT Motors over the last few years and has been patented for use in an electrically driven cabin motorcycle (Kim et al. 2013). The current “C-1” prototypes use two gyroscopes rotating in opposite directions around the vertical axis, and their mountings can be independently turned around the transverse axis relative to the vehicle body. While the gyroscopic reaction moments eliminate one another during normal travel, a considerable rolling moment (in the example, up to 2.3 kNm) can be imposed as a function of gyroscopic inertia (e.g., 0.07 kgm2of each gyroscope) and rotation and swivel speed (approx. 15,000 min−1 and 100 min−1). For improved protection of the occupants in a typical side-on collision at an inner-city junction, this should be sufficient to prevent the bike falling over sideways, but instead allow it to be pushed away, like a car. Influencing the roll equilibrium also makes it possible to ride through curves at a different rolling angle from the usual value or even completely upright – which makes it easier, for example, to filter through traffic jams. Furthermore, the stabilizing gyroscopes also help to increase the efficiency of electrically powered vehicles, as they can also be used as energy accumulators. At standstill and at lower speeds, they rotate very quickly to cover the stabilization requirement; at higher speeds gyroscopic stabilization is increasingly provided by the wheels. The rotation speed of the additional gyroscopes can therefore be reduced and the energy that is released can be used to accelerate the vehicle. This is reversed on deceleration and braking energy is recovered by renewed acceleration of the stabilizing gyroscopes.
However, it remains to be seen to what extent this technology – which is also promising in the sense of an emergency brake function – proves itself in the cabin motorcycle and can be transferred to conventional motorcycles with their limited construction space.
References
ACEM (European Association of Motorcycle Manufacturers) (2009) MAIDS: motorcycle accidents in depth study – in-depth investigations of accidents involving powered two wheelers. www.maids-study.eu, Final report 2.0, Published Apr 2009
ADAC (2010) Viel zu wenige Motorräder haben ABS (Far too few motorcycles have ABS). ADAC Press Release, Published 1 Apr 2010
Bayer B (1986) Das Pendeln und Flattern von Krafträdern (Weave and wobble of motorcycles). Institut für Zweiradsicherheit (Institute for Motorcycle Safety), Bochum (meantime moved to Essen)
Böhringer U (2013) Adaptives Dämpfungssystem – Fahrwerks-Finessen beim Motorrad (Adaptive damping control – finesse for motorcycle chassis). www.faz.net. Published 27 Sept 2013
Bosch (2013a) Motorrad-Stabilitätskontrolle von Bosch geht in Serie (Bosch motorcycle stability control goes into series production). www.bosch-presse.de, PI 8314. Published 23 Sept 2013
Bosch (2013b) Eine Million Motorräder fahren mit ABS von Bosch (One million motorcycles fitted with Bosch ABS). www.bosch-presse.de, PI 8362. Published 5 Nov 2013
BOSE Corporation (2004) Bose suspension system. www.bose.com. Published 2004
DAT (Deutsche Automobil Treuhand) (2014) DAT report 2014. www.dat.de/report. Accessed 22 Dec 2014
De Filippi P, Tanelli M, Corno M, Savaresi S, Fabbri L (2011a) Semi-active steering damper control in two-wheeled vehicles. IEEE Transactions Control Systems Technology 19(5):1003–1020
De Filippi P, Tanelli M, Corno M, Savaresi S (2011b) Enhancing active safety of two-wheeled vehicles via electronic stability control. In: 18th IFAC world congress, Milan
DEKRA (2010) DEKRA Verkehrssicherheitsreport Motorrad 2010 (DEKRA motorcycle traffic safety report 2010). www.dekra.com. Published in April 2010
DESTATIS (2013) Verkehrsunfälle Zeitreihen 2012 (Time series of road accident data in Germany 2012), Sections 5.1.2 (2) and 7.4, last figures for 2010. www.destatis.de.Published. 10 July 2013
EU (European Union) (2013) Regulation (EU) No 168/2013 of the European Parliament and the Council of 15 January 2013 on the approval and market surveillance of two-, three-, and four-wheeled vehicles. http://eur-lex.europa.eu/. Accessed 22 Dec 2014
Funke J (2007) Belastung und Beanspruchung von Motorradfahrern bei der Bremsung mit verschiedenen Bremssystemen (Stress and strain of motorcyclists when braking with different brake systems). VDI-Verlag, Düsseldorf
Funke J, Savaresi S, Spelta C (2010) Electrorheological dampers as a basis for semi-active motorcycle suspensions. In: Proceedings of the 8th international motorcycle conference, Cologne, pp 211–224
Gwehenberger J, Schwaben I, Sporner A, Kubitzki J (2006) Schwerstunfälle mit Motorrädern (Most serious accidents with motorcycles). In: VKU Verkehrsunfall und Fahrzeugtechnik 01/2006. Springer Fachmedien München GmbH, Munich, pp 11–18
Hurt H, Ouellet J, Thom D (1981) Motorcycle accident cause factors and identification of countermeasures (Final report). U.S. Department of Transportation, NHTSA, Washington, DC
IIHS and HLDI (Insurance Institute for Highway Safety and Highway Loss Data Institute) (2013) Status report, vol 48, no 4, 30 May 2013
IRTAD (International Traffic Safety Data and Analysis Group) (2013) Road safety annual r2013, OECD International Transport Forum, Paris
Kim D, Bretney K, Shao A, Tsang A (2013) Electronic control system for gyroscopic stabilized vehicle, Patent US 8532915-B2
Kühn M (2009) An analysis of motorcycle accidents, no. 5. http://udv.de/en/publications/compact-accident-research. Accessed 22 Dec 2014
Landerl C, Deissinger F, Wagner H-A, Jahreiss H-J (2010) Erweiterte Fahrerassistenz durch die Verknüpfung der Motor- und Fahrwerksregelsysteme der BMW S 1000 RR (Enhanced rider assistance via connection of the engine- and suspension control systems of the BMW S 1000 RR). In: Proceedings of the 8th international motorcycle conference, Cologne, pp 362–377
Nishikawa Y, Nanri T, Takenouchi K, Takayanagi S, Tani K, Fukaya S (2008) Experimental study of pitching control of large motorcycles with short wheelbases using a brake-by-wire system. In: Proceedings of the 7th international motorcycle conference, Cologne, pp 430–446
Reissing J, Wagner H-A, Jahreiss H-J, Bachmann J, Müller P (2006) Integral ABS und ASC – Die neuen Fahrdynamik Regelungssysteme von BMW Motorrad (Integral-ABS and ASC – the new driving dynamics control systems by BMW Motorrad). In: Proceedings of Brake.tech conference, Munich
Reul M (2011) Bremswegverkürzungspotential bei Informationsaustausch und Koordination zwischen semiaktiver Dämpfung und ABS (Braking distance reduction potential through information exchangeand coordination of semi-active damping with ABS control). VDI-Verlag, Düsseldorf
Roll G, Hoffmann O (2010) Evaluation of the safety benefits of electronic brake-controlsystems in single-track vehicles. In: Proceedings of the 8th international motorcycle conference 2010, pp 423–468
Roll G, Hoffmann O, König J (2009) Effectiveness evaluation of anti lock brake systems (ABS) for motorcycles in real-world accident scenarios. In: Proceedings of the 21st international technical conference on the enhanced safety of vehicles (ESV), Stuttgart. www.nhtsa.gov/ESV. Accessed 22 Dec 2014
Schneider R (2013) Vollbremsung in Schräglage (Slamming the brakes while cornering). In: Motorrad 23/2013. Motor Presse Stuttgart, Stuttgart, pp 52–55
Schneider R (2014) Schrecklage und Schrägbremsen (Panic Situation and Braking while Cornering). In: Motorrad 04/2014, Motor Presse Stuttgart, Stuttgart, pp. 38-41
Schröter K, Bunthoff J, Fernandes F, Schröder T, Winner H, Seiniger P, Tani K, Fuchs O (2010) Brake steer torque optimized corner braking of motorcycles. In: Proceedings of the 8th international motorcycle conference, Cologne, pp 396–422
Schröter K, Wallisch M, Vasylyev O, Schleiffer J-E, Pleß R, Winner H, Tani K, Fuchs O (2012) Update on brake steer torque optimized corner braking of motorcycles. In: Proceedings of the 9th international motorcycle conference, Cologne, pp 2–46
Schröter K, Wallisch M, Weidele A, Winner H (2013) Bremslenkmomentoptimierte Kurvenbremsung von Motorrädern (Brake steer torque optimized corner braking of motorcycles). In: ATZ 05/2013. Springer Vieweg, Wiesbaden, pp 436–443
Seiniger P (2009) Erkennbarkeit und Vermeidbarkeit von ungebremsten Motorrad-Kurvenunfällen (Technical potential to detect and avoid un-braked motorcycle accidents in curves). VDI-Verlag, Düsseldorf
Seiniger P, Winner H, Schröter K, Kolb F, Eckert A, Hoffmann O (2006) Entwicklung einer Rollwinkelsensorik für zukünftige Bremssysteme (Development of a roll angle sensor technology for future brake systems). In: Proceedings of the 6th international motorcycle conference, Cologne, pp 369–388
Seiniger P, Winner H, Gail J (2008) Future vehicle stability control systems for motorcycles with focus on accident prevention. In: 9th biennial ASME conference on engineering systems design and analysis, Haifa
Sporner A, Kramlich T (2000) Zusammenspiel von aktiver und passiver Sicherheit bei Motorradkollisionen (Combination of primary and secondary safety aspects within motorcycle collisions). In: Proceedings of the 3rd international motorcycle conference, pp 55–80
Stoffregen J (2010) Motorradtechnik (Motorcycle technology). Vieweg + Teubner, Wiesbaden
Tani K, Inoue N, Kato M, Hikichi T, Thiem M (1993) Research on Traction Control System for Motorcycle. In:VDI Berichte Nr. 1025, VDI-Verlag, Düsseldorf
Tani K, Toda M, Takenouchi K, Fukaya S (2010) Research on brake-by-wire system for super-bike race motorcycle. In: Proceedings of the 8th international motorcycle conference, Cologne, pp 378–395
Wakabayashi T, Sakai K (2004) Development of electronically controlled hydraulic rotary steering damper for motorcycles. In: Proceedings of the 5th international motorcycle conference, pp 489–509
Weidele A (1994) Untersuchungen zum Bremsverhalten von Motorrädern unter besonderer Berücksichtigung der ABS-geregelten Kurvenbremsung (Investigations on the braking behavior of motorcycles with focus on ABS-controlled corner braking). VDI-Verlag, Düsseldorf
Willig R, Lemejda M (2012) A new inertial sensor unit for dynamic stabilizing systems of powered two wheelers. In: Proceedings of the 9th international motorcycle conference, Cologne, pp 66–84
Wunram K, Eckstein L, Rettweiler P (2011) Potential aktiver Fahrwerke zur Erhöhung der Fahrsicherheit von Motorrädern (Potential to enhance motorcycle safety through active suspensions). Report F81 of the German Federal Highway Research Institute (BASt), Verlag Neue Wissenschaft, Bremerhaven
Yildirim F, Mörbe M (2013) Modern brake control systems and sensor systems for power two wheeler (PTW). In: Proceedings of EuroBrake conference 2013, Dresden
Acknowledgments
The authors would like to thank Jörg Reissing, Alfred Eckert, and Jürgen Bachmann, who, as co-authors of the first two editions, made a huge contribution towards the writing of this chapter. Special thanks also go to all our contacts at BMW Motorrad, KTM, Honda, Bosch, and Continental for providing us with technical information and images.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2016 Springer International Publishing Switzerland
About this entry
Cite this entry
Schröter, K., Pleß, R., Seiniger, P. (2016). Vehicle Dynamics Control Systems for Motorcycles. In: Winner, H., Hakuli, S., Lotz, F., Singer, C. (eds) Handbook of Driver Assistance Systems. Springer, Cham. https://doi.org/10.1007/978-3-319-12352-3_42
Download citation
DOI: https://doi.org/10.1007/978-3-319-12352-3_42
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-12351-6
Online ISBN: 978-3-319-12352-3
eBook Packages: EngineeringReference Module Computer Science and Engineering