
Abstract
In this paper, we propose a nonlinear fractional-order model in order to explain and understand the outbreaks of foot-and-mouth disease. The proposed model rely on the Caputo operator. We computed the basic reproduction number and demonstrated that it is an important metric for extinction and persistence of the disease. Utilizing reported foot-and-mouth disease data for Zimbabwe and the nonlinear least-squares curve fitting method we estimated the model parameters. Meanwhile, we performed an optimal control study on the use of animal vaccination and culling of infectious animals as disease control measures against foot-and-mouth disease. Our findings showed combinations of optimal vaccination and culling rates that could lead to the effective management of the disease.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
Mathematical models have proved to be useful tools for enhancing the understanding of several phenomena in science and engineering [1,2,3,4,5,6,7,8]. One of the mathematical concept that has been widely used to study science and engineering phenomena is arguably the concept of differentiation [9]. Through this concept researchers are able to construct mathematical formulas called differential equations, which are then used to infer the dynamics of any chosen phenomena in science and engineering. These differential equations can either be in integer form or non-integer form (fractional-order derivatives). Recently many scientists have argued that due to complexities that characterize science and engineering phenomena non-integer derivatives are more efficient to capture the dynamics of these events compared to integer-order derivatives [9]. One of the main reason being put forward by researchers is that fractional-order models can effectively account for memory influences which are inherent in science and engineering phenomena [9,10,11].
The main goal of this study is to develop and analyze a fractional-order foot-and-mouth disease model. Foot-and-mouth disease (FMD), a highly contagious livestock disease that can be transmitted directly and indirectly, remains a major challenge in many sub-Saharan Africa countries such as Zimbabwe, Botswana and Zambia [12, 13]. Owing to its economic consequences understanding the spread and control of foot-and-mouth disease in these countries has become increasingly important. Since the 2001 FMD outbreak in the United Kingdom (UK), modeling the transmission dynamics of FMD has been an interesting topic for a number of scientists [12,13,14,15,16,17,18,19,20,21]. Mushayabasa et al. [13] proposed a non-autonomous model to study the effects of seasonal variations on the dynamics of FMD. Their study demonstrated that seasonal variations have a strong influence of FMD dynamics. Bravo de Rueda et al. [16] formulated a dynamical model to quantify the transmission of foot-and-mouth disease virus (FMDV) caused by an environment contaminated with secretions from infected calves. Their work revealed that a contaminated environment contributes considerably to the transmission of FMDV, hence they suggested that farmers need to make use of hygiene measures in order to reduce indirect transmission of the virus. Tessema et al. [18] utilize a delay ordinary differential equation model to characterize the effects of prophylactic vaccination, reactive vaccination, prophylactic treatment and reactive culling on the spread of FMD. The researchers noted that implementing a combination of strategies during an FMD outbreak can play a crucial role in minimizing the spread of the disease in the community.
The aforementioned studies and those cited therein greatly improved the existing knowledge on FMD transmission and control, however, majority of the existing models were based on integer differentiation and we believe that integer differentials do not satisfactorily describe memory and hereditary properties which are inherent in FMD dynamics. Therefore, there is need for researchers to construct a fractional-order model to understand FMD transmission dynamics. To the best of our knowledge, such a model is still lacking. In this paper, we propose a novel FMD model that makes use of Caputo fractional order derivative. The fractional derivatives have several different kinds of definitions, among which the Riemann–Liouville fractional derivative and the Caputo fractional derivative are two of the most important ones in applications [22]. Since the Caputo operator makes use of local initial condition which have known physical interpretations, it is preferred over the Riemann–Liouville operator [23]. Furthermore the Caputo derivative is in case of homogeneous initial values, deemed equivalent to both the Grünwald–Letnikov definition and Riemann–Liouville [24] hence for brevity we only consider the application of the Caputo derivative.
This paper is organized as follows: In section “Preliminary Results”, we present basic definitions of fractional calculus. In section “Model Formulation”, we proposed a novel FMD model based on the Caputo fractional order derivative. In section “Dynamical Behavior of the Model”, we studied the dynamical behavior of the proposed model. In particular, we computed the basic reproduction number and anayzed the global stability of the model equilibrium points. In section “Estimation of Model Parameters Using Real Data”, we estimated the model parameters, utilizing FMD data for Zimbabwe. In section “Optimal Control Problem”, the extended the proposed model to incorporate optimal control theory. In section “Concluding Remarks”, we present main conclusions of this work and unravel areas of future research.
Preliminary Results
We begin with some important definitions from theory of fractional calculus.
Definition 1
(See [25]). Suppose that \(\alpha>0, t>a, \alpha , a,t\in {\mathbb {R}}.\) The Caputo fractional derivative is given by
Definition 2
(See [25]). For a function \(f\in L^1([t_0,T])\) the Riemann–Liouville (RL) integral of order \(\alpha >0\) and the origin \(t_0\) is defined as:
where \(L^1([t_0,T])\) denotes the set of Lebesgue integrable functions on \([t_0,T]\) and \(\Gamma (x)\) is the Euler gamma function.
Theorem 1
(See [26]). Let \(\alpha >0,\) \(n-1<\alpha <n\in {\mathbb {N}}\). Suppose that \(f(t), f^{\prime }(t),\ldots ,f^{(n-1)} (t)\) are continuous on \([t_0,\infty )\) and the exponential order and that \(^C_{t_0}D^{\alpha }_tf(t)\) is piece-wise continuous on \([t_0,\infty )\). Then
where \({{\mathcal {F}}} (s)= {{\mathcal {L}}}\{f(t)\}.\)
Theorem 2
(See [27]). Let \({\mathbb {C}}\) be the complex plane. For any \(\alpha >0\) \(\beta >0\), and \(A\in {\mathbb {C}}^{n\times n}\), we have
for \({{\mathcal {R}}}s>\Vert A\Vert ^{\frac{1}{\alpha }}\), where \({{\mathcal {R}}}s\) represents the real part of the complex number s, and \(E_{\alpha , \beta }\) is the Mittag–Leffler function [28].
Theorem 3
(See [29]). Let \(x(\cdot )\) be a continuous and differentiable function with \(x(t) \in {\mathbb {R}}_+\). Then, for any time instant \(t\ge t_0,\) one has
Model Formulation
In this section, proposed is a fractional order foot-and-mouth disease model under the Caputo operator. The model system consists of eight state variables, of which seven variables account for cattle in different epidemiological stages of the disease, and these are susceptible animals S(t), animals vaccinated with a low efficacy vaccine V(t), animals vaccinated with a highly effective vaccine U(t), latently infected animals L(t), clinically infected animals I(t), FMD carriers (asymptomatically infected animals) A(t), and recovered animals R(t). Therefore at any time t the total population of cattle N(t) in a closed farm is \(N(t)=S(t)+U(t)+V(t)+L(t)+I(t)+A(t)+R(t).\) Meanwhile, an additional compartment P(t) that represents the concentration of the FMDV in the environment is incorporated. Thus, the proposed framework is summarized by the following system of equations:
The model is formulated under the following assumptions:
-
(i)
All new animals are recruited into the farm at a constant rate \(\Pi \) and they are assumed to be susceptible to infection. Albeit, FMD is a highly contagious disease with severe economic consequences, disease related mortality is often very low and more often infected cattle generally clear the systemic infection within 8–15 days [30]. Based on this assertion, we have ignored disease-related mortality rate in the proposed framework. However, we have assumed that natural mortality rate occurs at a similar and constant rate \(\mu \) day\(^{-1}\) in all epidemiological classes. Therefore, it is estimated that the average lifespan of cattle is equivalent to \(1/\mu \) days.
-
(ii)
In the proposed model, it is assumed that there are animals from which live-virus can be recovered 28 days post infection and defined as FMD carriers also known as persistently-infected. Albeit, the role of such animal on FMD dynamics is still a matter of debate, here we have considered that they are infectious and are also capable of shedding the virus into the environment. This suggestion is based on the study of Parthiban et al. [30]. Thus, disease transmission is assumed to occur through direct means between uninfected animals and infectious (both symptomatic and carriers) at a rate \(\beta _1\). Moreover, clinically infected animals and carriers are assumed to excrete the virus into the environment at rates \(\eta \) and \(\kappa \eta \), respectively. Here, \(\kappa \)is a modification factor meant to compare the infectivity and virus excretion between clinically infected and FMD carriers. The pathogen excreted into the environment is assumed to decay at a rate \(\delta \) day\(^{-1}.\) In addition, it is assumed that uninfected animals can be infected by the virus in the environment at rate \(\beta _2.\)
-
(iii)
Upon infection, animals progress to the latent/exposed stage where they incubate the disease for \(1/\gamma \) days before they start to display clinical signs of the disease. As highlighted earlier, infected animals are assumed to clear the systemic infection after \(1/\phi \) days which ranges between 8 and 15 days. Moreso, prior studies have shown that in ruminants there is always a fraction say f from which live-virus can be recovered 28 days post infection and this usually ranges between 15 and 50% of the recovered animals. Furthermore, it has been estimated that it may take approximately 3.5 years for these animals to completely clear the virus. Therefore, \(1/\psi \) models the average duration an FMD carriers takes to clear the virus. Animals recovered from the infection are usually immune unless the host population is very large [31]. Based on this assertion, in this study we have ignored the reinfection of recovered animals.
-
(iv)
FMD has no cure, however, a couple of preventative and control measures that can be used to restrict the spread of FMDV exists, and these are vaccination of susceptible animals, slaughtering of clinically infected animals, movement restrictions as well as slaughtering of both susceptible and infected animals-the rational being to reduce animals density which leads to reduced animal contacts. Here, it is assumed that susceptible animals are vaccinated at a constant rate v day\(^{-1}\). Furthermore, clinically infected animals are assumed to be detected and culled at a rate c day\(^{-1}\). Since the proposed model is considered to be for a farm in resource limited settings, we neglected culling of FMD carriers since identification of these animals requires expensive tools which we believe livestock keepers in such settings cannot afford. In addition, we neglected slaughtering of animals with a view to reduce animal density based on the fact that in resource limited settings there is lack of infrastructure and resources (human and finances) to carry out the work as well as finances to compensate farmers who will lose their herds during such disease control program.
-
(v)
Nevertheless animal vaccination is arguably the best FMDV preventative strategy [32], it is worth noting that the efficacy of the vaccine depends on a number of factors such as the vaccine used and the source of procurement. In the proposed model we assumed that a fraction \(\sigma \) receive an ineffective vaccine and the remainder \((1-\sigma )\) a highly effective vaccine. The efficacy of ineffective and effective vaccines is modeled by \(\epsilon _1\) and \(\epsilon _2\), respectively, with \(0< \epsilon _1<\epsilon _2<1.\) Furthermore, animals vaccinated with an ineffective and effective lose vaccine induced immunity at rates \(\alpha _1\) and \(\alpha _2\), respectively. This assertion is based on the fact that most farmers may not afford the cost of high quality vaccines.

Transmission diagram of foot-and-mouth disease
Figure 1 presents the model flow diagram. In model system (2), recovered animals, R(t), do not influence the dynamics of the disease, that is, all the other equations in this model do not depend on variable R(t), and without loss of generality this second last equation can be ignored. Hence the dynamics of the disease can be explored from the following reduced system
Dynamical Behavior of the Model
This section is devoted on understanding the dynamical behavior of the proposed model (3) aspects that will be considered are the biological feasibility of model solutions as well as the local stability of the model steady states.
Biological Feasibility of Model of Solutions
According to Theorem 3.1 and Remark 3.2 of [33], the solution of system (3) is unique for \(t>0.\) We thus need to show that the solutions to (3) are non-negative for positive initial conditions.
Theorem 4
Let \({{\mathcal {X}}}(t)=(S(t),V(t),U(t),L(t), I(t), A(t), P(t))^T\) be the unique solution of system (3) for \(t\ge 0.\) Then the solution X(t) remains in \({\mathbb {R}}^{7}_{+}.\)
Proof
Thus, one can conclude that the results presented imply that the vector field given by the right hand side of (3) on each coordinate plane is either tangent to the coordinate plane or points to the interior of \({\mathbb {R}}^7_+\). Hence, the domain \({\mathbb {R}}^7_+\) is a positively invariant region. Moreover, if the initial conditions of system (3) are non-negative then it follows that the corresponding solutions of model (3) are non-negative. \(\square \)
Theorem 5
Let \( {{\mathcal {X}}}(t)=(S(t),V(t),U(t),L(t), I(t), A(t), P(t))^T\) be the unique of the model (3) for \(t\ge 0.\) Then, the solution \( {{\mathcal {X}}}(t)\) is bounded above, that is, \({{\mathcal {X}}}(t)\in \Omega \) where \(\Omega \) denotes the feasible region and is given by
where
Proof
For model (3) to be biologically meaningful all model solutions need to be positive. Hence for biological relevance there is need to demonstrate that all solutions of model system (3), which have been shown to be positive in Theorem 4 are bounded. Since all solutions of model system (3) have been shown to be positively invariant (Theorem 4) then it follows that the possible lower bound for these solutions is zero. Thus, in what follows we will concentrate on the upper-bound for these solutions. Let \({\widetilde{N}}(t)=S(t)+V(t)+U(t)+L(t)+I(t)+A(t).\) It follows that
Taking the Laplace transform leads to
Combining like terms and arranging leads to
Applying the inverse Laplace transform leads to
where \(C=\max \Bigg \{\frac{\Pi ^{ \alpha }}{\mu ^{\alpha }}, {\tilde{N}}(0)\Bigg \}\). Thus, \({\widetilde{N}}(t)\) is bounded from above. We now proceed the equation for the pathogen population. Thus from the last equation of system (3) we have
By following the similar approach as before, one can easily deduce that
where \(\displaystyle {\widetilde{C}}=\max \{\frac{(\eta ^{\alpha } +\kappa \eta ^{\alpha })C}{\delta ^{\alpha }}, P(0)\}.\) Hence, one can conclude that the solution \({{\mathcal {X}}}(t)\) is bounded above. \(\square \)
The Basic Reproduction Number
The basic reproduction number, often denoted, \({{\mathcal {R}}}_{0}\) is an integral metric for infectious disease models. Through it one can determine the power of the infection to invade the community. Moreover, model parameters (which more often represent transition between epidemiological stages or factors, such as disease control measures) can be determined. This section is devoted to the computation of \({{\mathcal {R}}}_{0}\). However, before we compute \({{\mathcal {R}}}_{0}\) there is need to determine the disease free equilibrium (DFE). The DFE is a steady state of model system (3) which signifies the absence of the disease in that community, that is, \(E=I=A=P=0\). Using direct calculations one can easily deduce that this steady state is equivalent to \((S^{0}, V^{0}, U^{0}, 0, 0, 0, 0),\) where
Applying the next-generation method of van den Driessche and Watmough [34] results in
where \({{\mathcal {R}}}^{\text{ dir }}_{0}\) and \({{\mathcal {R}}}^{\text{ ind }}_{0}\) are interpreted as the average number of new infections reproduced via the direct and indirect routes respectively.
Global Stability of the Model Steady States
In this section, we will utilize Lyapunov functionals to investigate the globally (uniformly) asymptotically stable of the steady states of model system (3).
Theorem 6
For system (3), whenever \({{\mathcal {R}}}_0\le 1\), the disease-free equilibrium point is globally (uniformly) asymptotically stable.
Proof
Consider the following Lyapunov functional:
where \(a_1\), \(a_2\), \(a_3\) and \(a_4\) are positive constants and are defined as follows:
Based on the linearity property of FDEs we have
Simplifying one gets
Hence, if \({{\mathcal {R}}}_0\le 1\), we have \(^c_{t_0}D^{\alpha }_t W(t)\le 0.\) Furthermore, let \({{\mathcal {Q}}}\) be the largest invariant subset of the set
We now claim that \({{\mathcal {Q}}}=\{{{\mathcal {E}}}^0\}.\) In fact, when \({{\mathcal {R}}}_0<1\), it follows from (4) that \(X =\{(S(t), V(t),\) U(t), L(t), \( A(t), I(t)|S(t)=S^0, V(t)=V^0, E(t)=0, A(t)=0, I(t)=0\},\) which leads to \({{\mathcal {Q}}}=\{{{\mathcal {E}}}^0\}\). If \({{\mathcal {R}}}_0<1\), and \(X =\{(S(t), V(t), U(t), L(t), A(t), I(t) |S(t)=S^0, V(t)=V^0, U(t)=0, L(t)=0, A(t)=0, I(t)=0\}\) from the first three equations of system (3) we have \(S(t)=S^0\), \(V(t)=V^0,\) and \(U(t)=U^0\). Again, we have \({{\mathcal {Q}}}=\{{{\mathcal {E}}}^0\}\). Noting that \({{\mathcal {Q}}}\) is invariant, therefore by the Lasalle’s Invariance Principle [35], the DFE is globally (uniformly) asymptotically stable whenever \({{\mathcal {R}}}_0\le 1.\) \(\square \)
In what follows, we investigate the global (uniformly) asymptotic stability of the non-trivial equilibrium of model system (3). We assume that this equilibrium point exists whenever \({{\mathcal {R}}}_0>1\) and let it be denoted by \({{\mathcal {E}}}^*=(S^*,U^*,V^*,L^*,I^*,A^*, P^*).\) Note that due to the complexity of model system (3) we did not compute \({{\mathcal {E}}}^*.\)
Theorem 7
Assume that \({{\mathcal {R}}}_0>1,\) then it follows that the endemic equilibrium of system (3) is globally asymptotically stable.
Proof
By closely following Theorem 3 we propose the following Lyapunov functional
It follows that the fractional derivative of H(t) along the solutions of system (3) leads to
Thus
At the endemic equilibrium of model system (3) we have the following identities:
Moreover, setting:
where \(g_1(I,A,P)=\beta _1^{\alpha }I+\beta _1^{\alpha }\theta A+\beta _2^{\alpha }P,\) and \(g_2(I,A)=\eta ^{\alpha } I+\kappa ^{\alpha } \eta A.\) After some tedious algebraic simplifications we have
For all the terms in the brackets, (1), (2), (3), one can easily verify that whenever \(S(t)=S^*\), \(V(t)=V^*\), \(U(t)=U^*\), \(L(t)=L^*\), \(I(t)=I^*\), \(A(t)=A^*\) and \(P(t)=P^*\), then \(^c_{t_0}D^{\alpha }_tH(t)=0.\) Moreover, since the arithmetic mean is greater than or equal to the geometric mean, once can verify that terms in brackets labeled (1) are less or equal to zero, for example
and it follows that;
Define \(\Phi (x)=1-x+\ln x\), for \(x>0\). It follows that \(\Phi (x)\le 0\), with the equality satisfied if and only if \(x=1.\) Using this relation we have
Furthermore;
Based on the above analysis we conclude that, if \({{\mathcal {R}}}_0>1\) we have \(^c_{t_0}D^{\alpha }_tH(t)\le 0.\) By Theorem 5.3.1 in [36], solutions limit to \({{\mathcal {M}}},\) the largest invariant subset of \(\{^c_{t_0}D^{\alpha }_tH(t)=0\}.\) Therefore, for all \((S(t), E(t), I(t),A(t),P(t))\ge 0\) provided that \(S^*,V^*,U^*,L^*,I^*,A^*,P^*\) are nonnegative, it follows by the Lasalle’s Invariance Principle [35], that the endemic equilibrium point is globally asymptotically stable whenever \({{\mathcal {R}}}_0> 1.\) \(\square \)
Estimation of Model Parameters Using Real Data
The main goal of this section is to utilize the least squares method and the Nelder–Mead algorithm [37] to estimate some of the model parameter. Other model parameters will be draw from literature. In addition, we will also make use of observed FMD data for Zimbabwe (January 2011 to June 2011) presented in Table 1. It is worth noting that FMD data for many endemic countries remains scarce, nevertheless this data set will enable us to estimated model parameters.
Utilizing FMD data presented in Table 1, we performed a fitting process using the least squares method and Nelder–Mead algorithm [37]. Estimated parameter values are presented in Table 2 and others are drawn from literature. The cumulative new monthly infections predicted by our model, C(t), are given by the solution (6) of the following equation:
where \(\zeta \) represents the proportion of reported FMD cases. Thus, the estimation of confirmed cumulative cases for FMD over a defined time frame \(t_{k-1}\le t\le t_k\) (where \(t_0\) and T marks the beginning and end of the time interval, respectively) from the model output requires to compute:
The following initial conditions were determined upon fitting the data, \(S(0)=10{,}000,\) \(V(0)=U(0)=L(0)=0,\) \(I(0)=375,\) \(A(0)=0\) and \(P(0)= 2.0\times 10^6.\)

Fitting of FMD cumulative cases for the Caputo version of the proposed model (2) with different values of \(\alpha .\) Continuous trend lines represents \(\alpha =0.9335;\, 0.9340;\,0.9345;\,0.9350\) are in colors red, blue, black and purple, respectively. The observed data is illustrated in circles (color figure online)

The root-mean-square error computations (RMSEC) of the model estimation for different derivative orders. The minimum error of estimation is obtained for \(\alpha =0.934455\)
Figure 2 shows the FMD cumulative cases fit for the four different estimated values of \(\alpha \), that is., \(\alpha =0.9335;\, 0.9340;\,0.9345;\,0.9350\) are in colors red, blue, black and purple, respectively. It can thus be deduced that the cumulative number of FMD cases are more for lower values of \(\alpha \) implying that cumulative cases are directly proportional to the strength of memory effects. The root mean square errors for the FMD cumulative fits (RMSEC) are 67.04; 57.92; 54.93; and 58.53, respectively. It can be observed that the least RMSEC lies between \(\alpha =0.9340\,\text{ and }\, 0.9350.\) Therefore, based on the proposed model together with the data utilized, the best fractional order for the proposed model is between \(\alpha =0.9340\,\text{ and }\, 0.9350.\)
A graphical illustration in Fig. 3 shows the value of the root-mean-square error computations (RMSEC) concerning the derivative order. The values of the parameters at which these errors have been obtained are presented in Table 2. From Fig. 3 we can note that decreasing the derivative order \(\alpha ,\) the error of estimation decreases until \(\alpha =0.934455\). Thereafter, decreasing the derivative order will increase the error. Hence we can conclude that \(\alpha =0.934455\) is the appropriate derivative order for this data set. Figure 4 shows the model fit with the derivative order \(\alpha \) set to 0.934455.

A times series plot showing FMD cumulative cases fit for \(\alpha =0.934455\)
Comparative Analysis of the Efficiency of the Classical Model Versus the Caputo Fractional-Order Model
In order to compare the efficiency of the Caputo derivative and the classical model (the integer derivative) on prediction of new FMD cases, we estimated new FMD cases using both the Caputo and the classical model and then computed the root sum squared of the deviations as follows:
Table 3 shows some important insights on the predictive powers of the Caputo fractional-order model in relation to the classical. We can note that the root sum squared for the Caputo fractional-order model is less than that of the classical order model. This imply that the Caputo fractional-order model is more accurate compared to the classical order model. To compute the efficiency rate of the Caputo fractional-order model, we closely follows that approach in [39], that is, \(\left( \frac{17958-4795}{17958}\right) \times 100\%=73.6\%.\) Hence, one can conclude that the efficiency rate of the Caputo fractional-order model is relatively high.
Optimal Control Problem
In this section, we intend to investigate some suitable time dependent strategies to attain effective disease management.
Fractional Optimal Control of the Foot-and-Mouth Disease Model
In this section, we utilize optimal control theory to determine the impact of vaccination and culling on controlling the spread of FMD for both epidemic and endemic scenario. Thus, the vaccination parameter v and culling parameter c, initially modeled as constants in (3) are now regarded as functions of time and are now known as controls. They are now represented as functions of time and will be assigned reasonable upper and lower bounds. Precisely, the control function v(t) measures the rate at which susceptible animals are vaccinated during each time period and the control c(t) measures the rate at with infectious animals are detected and destroyed during each time period.
Using the same variable and parameter names as in (3), the system of differential equations describing our model with controls is
The control set is defined as
In developing response plans to control the spread of FMD in the community, animal managers seek optimal responses that can minimize the numbers of infectious infectious animals over a finite time interval [0, T], while also minimizing the efforts of vaccination and culling. Thus, cost functional in this study is defined by
As we observe, in (9) the control efforts are assumed to be nonlinear-quadratic, since a quadratic structure in the control has mathematical advantages such as: if the control set is a compact and convex it follows that the Hamiltonian attains its minimum over the control set at a unique point. Furthermore the coefficients \(A_i\) \((i=1,2)\) are weight constants. The weights being constant over the prescribed time frame, are a measure of the relative costs of the interventions over a finite time horizon. The optimal control problem hence becomes that we seek optimal functions, \((v^{*}(t),c^{*}(t))\), such that
subject to the state equations in system (8) with initial conditions. By utilizing the Pontryagin’s Maximum Principle [40] we have the following Hamiltonian
where \(\lambda _S\), \(\lambda _V\), \(\lambda _U\), \(\lambda _L\), \(\lambda _I\), \(\lambda _A\), and \(\lambda _P\), represent the adjoint functions associated with the sates S, V, U, L, I, A and P, respectively.
In addition, one can demonstrate that given an optimal control pair \(( v^{*}, \ c^{*})\) and solutions (S, V, U, L, I, A, P), of the corresponding states system (8) there exist adjoint functions \(\lambda _S(t)\), \(\lambda _V(t)\), \(\lambda _U(t)\), \(\lambda _L(t)\), \(\lambda _I(t)\), \(\lambda _A(t)\) and \(\lambda _P(t)\) satisfying
with transversality conditions \(\lambda _j(T)=0\) for \(j=S, V, U, L, I, A, P\). Furthermore, the optimal controls are characterized by the optimality conditions:
Numerical Results and Discussion
In this section, we present some numerical results to explore the role of time dependent intervention strategies on minimizing the spread of FMD. An optimization algorithm, forward-backward sweep method [41, 42] has been developed using the Runge–Kutta fourth-order scheme to characterize the numerical solutions of the fractional optimal control problem (FOCP). For detailed information on steps carried out to numerically solve the FOCP, we refer the reader to [43]. Initial population considered are as follows \(S(0)=10{,}000,\) \(V(0)=0\), \(U(0)=0\), \(L(0)=300\), \(I(0)=356\), \(A(0)=0\), and \(P(0)= 2.0\times 10^6.\) Model parameters used are in Table 2, and additional model parameters not in Table 2 are in Table 4.
Prior studies have opined that more often the cost of vaccination is usually higher than that of culling of symptomatic animals [44], hence in our simulations we set \(A_1\ge A_2.\) Precisely, we set \(A_1=10^2\) and 10 respectively. Moreover, the simulations presented are based on: Strategy A (Time dependent vaccination alone, that is, there is no animal culling at all) and Strategy B (combination of vaccination and culling). Strategy A has been proposed based on the fact that prior studies have argued that animal culling is not a preferred intervention strategy in many countries where animal infections are endemic [45], since farmers may not receive compensation as most of these nations are developing countries.

Optimal control results demonstrating the impact of Strategy A (optimal vaccination alone) on minimizing the spread of the disease in the community. We set \(\alpha =0.934455\), \(0\le v(t)\le 0.09\)
As we can observe, the number of exposed, infectious and carriers decrease in the presence of time dependent intervention strategy than in the absence of the same. In particular, we have noted that in the presence of time dependent vaccination alone approximately \(3\,253\) infections will be recorded compared to 4636 when there is no time dependent vaccination, over a period of 200 days. Thus, the time dependent vaccination has likelihood of averting approximately 1383 infections, over a period of 200 days and the associated cost is approximately \(J=\$7106.60\).
With combined controls (Fig. 6), we can note that the population of exposed, infectious and carriers decrease significantly for both time dependent and non-dependent controls. As we can observe, with optimal vaccination and culling the numbers of exposed, infectious and carriers will be reduced to levels close to zero, suggesting that combined time dependent vaccination and culling has the potential to eradicate the disease whenever there is an outbreak. Furthermore, we have also observed that, over a 200 day period, 3595 infections will be recorded in the absence of time dependent controls and approximately 974 infections in the presence of optimal vaccination and culling, suggesting that combined optimal control may avert approximately 2621 infections. The associated cost in this case will be approximately \(J=2146.90\). In addition, in Fig. 6d we can observe that with combined controls, the control profile for v(t) stays at its maximum for a relatively short period (approximately 50 days), before it gradually drops to its minimum, than under strategy A. From these results we can conclude that with combined controls, optimal vaccination may need to be maintained at its maximum intensity for approximately 50 days, thereafter the intensity can be reduced gradually and after 150 days it may be ceased. However, optimal culling may need to be maintained at maximum intensity for approximately 180 days and can be gradually reduced thereafter, until the final time horizon.

Optimal control results demonstrating the impact of Strategy B (optimal vaccination and culling) on minimizing the spread of the disease in the community. We set \(\alpha =0.934455\), \(0\le v(t)\le 0.09\) and \(0\le c(t)\le 0.1\)

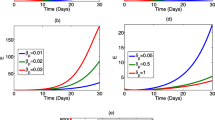
Optimal control solutions showing the effects of \(\alpha \) on the dynamics of the disease under strategy B. Note that the trend lines presented here, represents the dynamics of the disease in the presence of optimal control, there are no trend lines without optimal control. We set \(0\le v(t)\le 0.09\) and \(0\le c(t)\le 0.1\)
Simulation results in Fig. 7 show that the memory property of fractional derivatives, the order of \(\alpha \) has an effect on the estimated number of infections and the associated cost. For \(\alpha =0.8\), we can note that both the vaccination and the culling controls may need to be maintained at their maximum intensity for effective disease management. Detailed information on the impact of \(\alpha \) on the spread and control of FMD is presented in Table 4.
We can observe from Table 4, that cumulative infections with and without combined optimal controls decreases as \(\alpha \rightarrow 1.\) This can be attributed to the fact that when the derivative order \(\alpha \) is reduced from 1, the memory effect of the system increases, and therefore the infections grows slowly, as we can observe from all illustrations in Fig. 7, for \(\alpha =0.8\), the population levels for all the subgroups will not converge to the disease-free equilibrium. However, for \(\alpha =0.9\) and 1.0, all the population levels will converge to the disease-free equilibrium, over a 200 day time horizon.
Concluding Remarks
In this paper, we have proposed and analyzed a fractional-order foot-and-mouth disease (FMD) model. The proposed mathematical modeling framework incorporates relevant biological and ecological factors, vaccination effects, vaccine failure, direct and indirect transmission of the disease. In addition, the framework incorporates virus shedding by FMD carriers. The motivation to consider a fractional order is based on the fact that fractional order systems possess memory which is one of the main features of epidemiological infections. Model parameters of the proposed framework were estimated using the FMD data for Zimbabwe, January–June 2011. Moreover, we extended the basic framework to understand the implications of optimal vaccination and culling.
Our analytical results show that the disease-free equilibrium of the proposed model is globally asymptotically stable whenever the reproduction number is less than unity. However, when the basic reproduction number is greater than unity the model admits an endemic equilibrium which is also globally asymptotically stable. Making use of FMD dataset for Zimbabwe (January 2011–June 2011) and the least squares method we estimated some of the model parameters while some were drawn from literature. On fitting the model to data, we observed that a value of \(\alpha =0.934455\) gives a better fit. Further, we perform a comparative analysis on the efficiency of the Caputo fractional-order model and the classical (integer-order) model, to estimate new FMD cases. We noted that the Caputo fractional-order model is 73.6% accurate compared to the classical model. Although, fractional-order models are known to be more accurate than classical ones, it is worth noting that the efficiency rate varies based on the size of the dataset and uncertainties in model parameters.
Meanwhile, we performed an optimal control study on the use of animal vaccination and culling of infectious animals as disease control measures against foot-and-mouth disease. We proposed two control strategies, Strategy A and B, which we believe are feasible for developing countries where the disease is endemic. Strategy A involves optimal vaccination alone and Strategy B is based on combining animal vaccination and culling of clinically infected animals. As one can observe, strategy A excludes culling of clinically animals, thus this strategy was proposed based on the fact that prior studies have argued that animal culling is not a preferred intervention strategy in many countries where animal infections are endemic [45], since farmers may not receive compensation as most of these nations are developing countries. Under strategy B, optimal vaccination is combined with optimal culling of infectious animals. It is also worth noting that culling of uninfected animals has also not been included in the proposed model since prior studies have also argued that this strategy is not preferred by farmers in developing nations. Our optimal control simulations considered a 200-day time period. Simulation results for strategy A showed that in the presence of optimal vaccination the cumulative number of infections decreases but the disease may not be eradicated. However, when optimal vaccination is combined with optimal culling, we observed that the disease may be eradicated after approximately 150-days. Further, we explored the effects of the memory property of fractional derivatives, the order of \(\alpha \) on the cumulative infections and the associated cost. We noted that for \(\alpha <1\), the cumulative infections will be high and as \(\alpha \rightarrow 1\) they will decrease. In particular, we have noted that for \(\alpha =0.8\), combined optimal vaccination and culling may lead to effective management of the disease if both controls are maintained at their maximum intensities for a relatively long duration compared to \(\alpha =0.9.\) Moreover, we also observed that for \(\alpha =0.8\), the disease may not be eradicate during a 200 day period.
Last but not least, our model can be enhanced to capture other important features such as seasonal effects and animal movements. Furthermore, some of the numerical computations were performed using the Runge–Kutta method of fourth order. However, other efficient methods like the homotopy perturbation technique [3], the optimal variation iteration method [47], the computational economical methods such as the one proposed in [46] and many more other reliable methods such as the one suggested by [4], may also be applied to the presented optimal control problem to possibly get better results.
Data Availibility Statement
The data used to support the findings of this study are included within the article.
References
Hayat, T., Khan, M.I., Farooq, M., Alsaedi, A., Waqas, M., Yasmeen, T.: Impact of Cattaneo–Christov heat flux model in flow of variable thermal conductivity fluid over a variable thicked surface. Int. J. Heat Mass Transf. 99, 702–710 (2016)
Khan, M.I., Waqas, M., Hayat, T., Alsaedi, A.: Colloidal study of Casson fluid with homogeneous–heterogeneous reactions. J. Colloid Interface Sci. (2017). https://doi.org/10.1016/j.jcis.2017.03.024
Turkyilmazoglu, M.: Convergence of the homotopy perturbation method. Turkyilmazoglu M. Int. J. Nonlinear Sci. Numer. Simul. 12, 9–14 (2011)
Turkyilmazoglu, M.: Effective computation of exact and analytic approximate solutions to singular nonlinear equations of Lane–Emden–Fowler type. Appl. Math. Model. 37, 7539–7548 (2013)
Lolika, Po, Mushayabasa, S., Bhunu, C.P., Modnak, C., Wang, J.: Modeling and analyzing the effects of seasonality on brucellosis infection. Chaos Solitons Fract. 104, 338–349 (2017)
Kalinda, C., Mushayabasa, S., Chimbari, M.J., Mukaratirwa, S.: Optimal control applied to a temperature dependent schistosomiasis model. Biosystems 175, 47–56 (2019)
Al-khedhairi, A., Elsadany, A.A., Elsonbaty, A.: Modelling immune systems based on Atnaga–Baleanu fraction derivative. Chaos Solitions Fract. 129, 25–39 (2019)
Brauer, F., Castillo-Chavez, C.: Mathematical Models in Population Biology and Epidemiology. Springer, New York (2001)
Antonio, M., Hernandez, T., Vagras-De-Leon, C.: Stability and Lyapunov functions for systems with Atangana–Baleanu Caputo derivative: an HIV/AIDS epidemic model. Chaos Solitions Fract. 132, 109586 (2020)
Atangana, A., Baleanu, D.: New fractional derivatives with nonlocal and non-singular kernel: theory and application to heat transfer model. Therm. Sci. (2016). https://doi.org/10.2298/TSCI160111018A
Mlyashimbi, H., Moatlhodi, K., Dmitry, K., Mushayabasa, S.: A fractional-order Trypanosoma brucei rhodesiense model with vector saturation and temperature dependent parameters. Adv. Differ. Equ. 284, 1–23 (2020)
Mushayabasa, S., Bhunu, C.P., Dhlamini, M.: Impact of vaccination and culling on controlling foot and mouth disease: a mathematical modeling approach. WJV 1, 156–161 (2011)
Mushayabasa, S., Posny, D., Wang, J.: Modeling the intrinsic dynamics of FMD. Math. Biosci. Eng. 1, 156–161 (2011)
Keeling, M.J., Woolhouse, M.E.J., May, R.M., Davies, G., Grenfell, B.T.: Modelling vaccination strategies against foot-and-mouth disease. Nature 421, 136–142 (2003)
Mushayabasa, S., Tapedzesa, G.: Modeling the effects of multiple intervention strategies on controlling foot-and-mouth disease. BioMed Res. Int. 2015, Article ID 584234 (2015)
Bravo, de Rueda C, de Jong CM M, Eble LP, Dekker, A.: Quantification of transmission of foot-an-mouth disease virus caused by an environment contaminated with secretions and excretions from infected calves. Veter. Res. 46, 43 (2015)
Zhang, J., Zhen, Jin, Yuan, Yuan: Assessing the spread of foot and mouth disease in mainland china by dynamical switching model. J. Theor. Biol. (2018). https://doi.org/10.1016/j.jtbi.2018.09.027
Tessema, K.M., Chirove, F., Sibanda, P.: Modeling control of foot and mouth disease with two time delays. Int. J. Biomath. 12(04), 1930001 (2019)
Gashirai, B.T., Musekwa-Hove, D.S., Lolika, P.O.P.O., Mushayabasa, S.: Global stability and optimal control analysis of a foot-and-mouth disease model with vaccine failure and environmental transmission. Chaos Solitons Fract. 132, 109568 (2020)
Gashirai, B.T., Musekwa-Hove, D., Mushayabasa, S.: Lyapunov stability analysis for a delayed foot-and-mouth disease model. Discrete Dyn. Nat. Soc. (2020). https://doi.org/10.1155/2020/3891057
Gashirai, B.T., Musekwa-Hove, D.S., Mushayabasa, S.: Dynamical analysis of a fractional-order foot-and-mouth disease model. Math Sci (2021). https://doi.org/10.1007/s40096-020-00372-3
Atangana, A., Secer, A.: A note on fractional order derivatives and table of fractional derivatives of some special functions. Abstr. Appl. Anal. 2013, 279681 (2013)
Ucar, E., Ozdemir, N., Altun, E.: Fractional order model of immune cells influenced by cancer cells. Math. Model. Nat. Phenom. 14, 308 (2019). https://doi.org/10.1051/mmnp/2019002
Scherer, R., Kalla, S.L., Tang, Y., Huang, J.: The Grünwald–Letnikov method for fractional differential equations. Comput. Math. Appl. 62(3), 902–917 (2011). https://doi.org/10.1016/j.camwa.2011.03.054
Podlubny, I.: Fractional Differential Equations: An Introduction to Fractional Derivatives, Fractional Differential Equations, to Methods of Their Solution and Some of Their Applications, vol. 198. Academic Press, San Diego (1998)
Liang, S., Wu, R., Chen, L.: Laplace transform of fractional order differential equations. Electron. J. Differ. Equ. 2015(139), 1 (2015)
Kexue, L., Jigen, P.: Laplace transform and fractional differential equations. Appl. Math. Lett. 24(12), 2019–2023 (2011)
Igor, P.: Fractional Differential Equations: Mathematics in Science and Engineering, vol. 198. Academic Press, New York (1999)
Vargas-De-Leon, C.: Volterra-type Lyapunov functions for fractional-order epidemic systems. Commun. Nonlinear Sci. Numer. Simul. 24(1–3), 75–85 (2015)
Parthiban, A.B.R., Mahapatra, M., Gubbins, S., Parida, S.: Virus excretion from foot-and- mouth disease virus carrier cattle and their potential role in causing new outbreaks. PLoS ONE 10(6), e0128815 (2015). https://doi.org/10.1371/journal.pone.0128815
Thomson, G.R.: The role of carrier animals in the transmission of foot-and-mouth disease. In: Comprehensive Reports on Technical Items Presented to the International Committee 64th General Session (pp. 87–103): Paris: Off. Int, Epizootic (1996)
Bravo, D.E.R.C., Dekker, A., Eble, P.L., Dej, M.C.: Vaccination of cattle only is sufficient to stop FMDV transmission in mixed populations of sheep and cattle. Epidemiol. Infect. 143(11), 2279–2286 (2015)
Lin, W.: Global existence theory and chaos control of fractional differential equations. J. Math. Anal. Appl. 332, 709–726 (2007)
van den Driessche, P., Watmough, J.: Reproduction number and sub-threshold endemic equilibria for compartment models of disease transmission. Math. Biosci. 180, 29–48 (2002)
LaSalle, J.S.: The stability of Dynamical Systems. CBMS-NSF Regional Conference Series in Applied Mathematics, vol. 25. Philadelphia: SIAM (1976)
Hale, J.K., Verduyn Lunel, S.: Introduction to Functional Differential Equations. Springer, New York (1993)
Nelder, J., Mead, R.: A simplex method for function minimization. Comput. J. 7, 308–313 (1964)
Alexandersen, S., Zhang, Z., Donaldson, A.I.: Aspects of the persistence of foot-and-mouth disease virus in animals-the carrier problem. Microbes Infect. 4(10), 1099–1110 (2002)
Qureshi, S., Yusuf, A.: Fractional derivatives applied to MSEIR problems: comparative study with real world data. Eur. Phys. J. Plus 134(4), 171 (2019)
Pontryagin, L.S., Boltyanskii, V.G., Gamkrelidze, R.V., Mishchenko, E.F.: The Mathematical Theory of Optimal Processes. Wiley, New York (1962)
Lenhart, S., Workman, J.T.: Optimal Control Applied to Biological Models. Chapman and Hall; CRC Press, Boca Raton (2007)
McAsey, M., Mou, L., Han, W.: Convergence of the forward–backward sweep method in optimal control. Comput. Optim. Appl. 53, 207–226 (2012)
Kheiri, H., Jafari, M.: Optimal control of a fractional-order model for the HIV/AIDS epidemic. Int. J. Biomath. 11, 1850086 (2018)
Lolika, O.P., Mushayabasa, S.: Dynamics and stability analysis of a brucellosis model with two discrete delays. Discrete Dyn. Nat. Soc., 2018, Article ID 6456107 (2018)
Zamri-Saad, M., Kamarudin, M.I.: Control of animal brucellosis: the Malaysian experience. Asian Pac. J. Trop Med. 9(12), 1136–1140 (2016). https://doi.org/10.1016/j.apjtm.2016.11.007
Turkyilmazoglu, M. (2011) An optimal analytic approximate solution for the limit cycle of duffing-van der Pol equation. J. Appl. Mech. 78: 021005-1
Turkyilmazoglu, M.: An optimal variation iteration method. Appl. Math. Lett. 24, 762–765 (2011)
Author information
Authors and Affiliations
Contributions
Gashirai, B.T.: Conceptualization, Formal analysis and Methodology. Hove-Musekwa, S.D.: Original draft preparation. Mushayabasa, S.: Software, Validation, Writing-Reviewing and Editing.
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Gashirai, T.B., Hove-Musekwa, S.D. & Mushayabasa, S. Optimal Control Applied to a Fractional-Order Foot-and-Mouth Disease Model. Int. J. Appl. Comput. Math 7, 73 (2021). https://doi.org/10.1007/s40819-021-01011-8
Accepted:
Published:
DOI: https://doi.org/10.1007/s40819-021-01011-8
Keywords
- Mathematical modelling
- Fractional calculus
- Epidemiological models
- Foot-and-mouth disease
- Optimal control theory