
Abstract
This article focuses on the problem of adaptive finite-time trajectory tracking control for a quadrotor unmanned aerial vehicle (UAV) with actuator faults. By introducing a novel finite-time command filter, the derivative of virtual control law is approximated, so the issue of “explosion of complexity” is successfully avoided. At the same time, the fractional power error compensation mechanism is constructed to quickly remove the effect of filtered error. By virtue of the command filter technique, backstepping design method, and event-triggered control strategy, the adaptive finite-time fault-tolerant controllers for a quadrotor UAV are designed. It is demonstrated that all signals of the closed-loop system are finite time bounded, and the attitude and position tracking errors can converge to a small neighborhood near the origin in a finite time. Finally, the simulation examples are given to validate the efficacy of the developed adaptive finite-time control algorithm.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
In the past decades, trajectory tracking control of the quadrotor unmanned aerial vehicle (UAV) has been a hotspot due to its broad range of applications, including military defense, urban services, and plant protection [1,2,3,4]. A large number of studies have been reported on quadrotor UAVs via various control techniques, such as PID control [5], sliding mode control [6, 7], and backstepping control [8,9,10]. It should be noted that the chattering phenomenon in [6, 7] is inevitable and the drawback of “complexity explosion” in [8,9,10] also cannot be effectively solved.
Recently, a series of dynamic surface control (DSC) schemes have been presented for quadrotor UAVs in [11,12,13] to decrease the complexity of the existing control strategies. Meanwhile, the command filtered backstepping (CFB) technique was used for the trajectory tracking control of a quadrotor UAV [14], which eliminated unconsidered filtered errors [11,12,13] by introducing error compensating (EC) signals. In [15], an adaptive attitude loop controller via the CFB technique was constructed for a six-freedom nonlinear small UAV without precise models. Consider the quadrotor UAV with input saturation and disturbances, the command filter-based disturbance observer flight control algorithm was proposed in [16]. It is well known that fuzzy logic systems [17,18,19,20] and neural networks [21,22,23] are considered as powerful tools for controlling nonlinear systems owing to the universal approximation properties. Subsequently, some approximation-based adaptive control schemes for quadrotor UAVs [24,25,26] have been proposed, which effectively approximate the unknown nonlinear dynamics. However, the abovementioned control strategies are based on the premise that the control signals are continuously transmitted to actuators, which occupy communication bandwidth and waste resources.
The event-triggered control (ETC) technique, which has the advantage of lower resource consumption, has been utilized to ease the communication burden of quadrotor UAVs. An event-triggered-based adaptive constraint control algorithm was proposed for a quadrotor UAV [27], which made the output errors meet the asymmetric constraints. Based on the fixed threshold ETC strategy in [28], the problem of tracking control for the quadrotor UAV was studied. When the quadrotor UAV raised external disturbances, an event-triggered-based adaptive controller was constructed in [29] to ensure the robustness of the closed-loop system. Given the quadrotor UAVs with input saturation, the antisaturation tracking control schemes in light of relative threshold ETC technique were proposed in [30, 31], respectively. Nevertheless, these results only guarantee asymptotic convergence. Finite-time control [32, 33] was considered to be the time-optimal control strategies with fast convergence and strong robustness. More recently, a series of finite-time flight control algorithms for quadrotor UAVs have been presented, see, e.g., [34,35,36,37,38], which have superiorities in convergence speed and robustness. In [34], the problem of finite-time formation control for quadrotor UAVs was investigated. For the attitude system, the adaptive flight controllers were designed in [35, 36] based on the finite-time stability theory. In the cases of input saturation and model uncertainties, the adaptive finite-time control strategies were developed in [37, 38], which guaranteed the global convergence of quadrotor UAVs.
On the other hand, the unexpected failures on the quadrotor UAV could severely degrade the flight performance and even lead to the crash, so it is essential to guarantee the fault tolerance of the flight controller. In [39], the complete fault of the single rotor for the quadrotor UAV was considered. The controllability remained at the expense of rolling angle freedom, which means that the UAV cannot complete the established task but to make a forced landing. Using sliding mode control and observer technique, the fault-tolerant control strategies for quadrotor UAVs were proposed in [40, 41], respectively. In [42], the distributed finite-time containment controller for multi-UAVs with actuator faults was designed using the minimum learning parameter technique. The problem of adaptive finite-time fault-tolerant control for single UAV [43] was considered, and the distributed finite-time control algorithm for multi-UAVs [44] with actuator faults was proposed. To the best of author’s knowledge, the event-triggered-based adaptive finite-time trajectory tracking control for quadrotor UAVs with actuator faults via CFB technique has not been solved.
Inspired by the preceding discussion, this article investigates the problem of trajectory tracking control for a quadrotor UAV with actuator faults and develops a fuzzy approximation-based event-triggered adaptive finite-time fault-tolerant control strategy. The main contributions of this article are summarized as follows:
-
(1)
The proposed finite-time command filtered backstepping (FTCFB) control strategy, by combining the finite-time command filter technique and the fractional power error compensation mechanism, not only overcomes the issue of “explosion of complexity” in [8,9,10] but also eliminates the effect of filtered error unsettled in DSC [11,12,13], resulting in faster convergence and better tracking performance.
-
(2)
Different from the asymptotical convergence control schemes for quadrotor UAVs [14,15,16] related to CFB technique, the ETC algorithm based on the relative thresholds event-triggered mechanism is developed, which reduces the execution number of actuators while saving the computing resources of the airborne platform. In addition, the attitude and position tracking errors can converge to a small neighborhood near the origin in a finite time.
-
(3)
In contrast to the existing fault-tolerant control schemes [39,40,41], the partial loss of effectiveness and unknown bias faults in actuators are both considered in this paper. Especially, the prior information of bias faults is no longer required based on the adaptive compensation technique.
The rest of this paper is organized as follows. The model description and preliminaries are provided in Sect. 2. In Sect. 3, the finite-time fault-tolerant control scheme for the quadrotor UAV is developed and the stability analysis is also provided. The simulation results and the conclusion are presented in Sects. 4 and 5, respectively.
2 Model Description and Preliminaries
2.1 Model Description
Consider the quadrotor UAV and its dynamics model is described as follows:
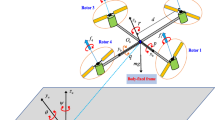
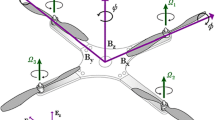
where \(\phi ,\theta ,\psi\) represent roll, pitch, and yaw angle; the positions of quadrotor UAV in space are described by x, y, and z. g is the gravitational acceleration. m and a indicate the mass of UAV and the distance from the fuselage center to the propeller shaft; \(I_x, I_y, I_z\) stand for the moment inertia of UAV; \(J_r\) and \(\varpi _r\) denote the moment inertia and angular speeds of the rotors. For \(i=\phi , \theta , \psi , z, x, y\), \(d_i\) denotes bounded disturbance satisfying \(\mid d_i \mid \le {\bar{d}}_{i}\) with \({\bar{d}}_{i}>0\) being a constant. \(\tau _{\phi }, \tau _{\theta }, \tau _{\psi }\) and \(\tau _T\) are control inputs.
The actuator fault model of quadrotor UAV can be formulated as [45]: \(u_i^f=\rho _iu_i^a+b_i\), where \(\rho _i\in (0,1]\) indicates the residual efficiency factor; \(b_i\) is the unknown time-varying bias fault; and \(u_i^a\) is the actual control input signal. Define \((\eta _1, \eta _2, \eta _3, \eta _4, \eta _5, \eta _6)=(\phi , \theta , \psi , z, x, y)\), and the dynamics model of quadrotor UAV can be rewritten as
where \((g_1, g_2, g_3)=({a}/{I_x}, {a}/{I_y}, {1}/{I_z})\), \(g_4=g_5=g_6=1/m\), \((u_1^f, u_2^f, u_3^f)=(\tau _{\phi }, \tau _{\theta }, \tau _{\psi })\), \((u_4^f, u_5^f, u_6^f)= (\tau _T(\cos \phi \cos \theta )-mg, \tau _T(\cos \phi \sin \theta \cos \psi +\sin \phi \sin\psi),\)
\(\tau _T(\cos \phi \sin \theta \sin \psi -\sin \phi \cos \psi ))\), \((f_1, f_2, f_3)=({\dot{\theta }}{\dot{\psi }}(I_y-I_z)/I_x+\varpi _r{\dot{\theta }}{J_r}/I_x, {\dot{\phi }}{\dot{\psi }}(I_z-I_x)/I_y-\varpi _r{\dot{\phi }}{J_r}/I_y, {\dot{\phi }}{\dot{\theta }}(I_x-I_y)/I_z)\), \((d_1, d_2, d_3)=(d_\phi , d_\theta , d_\psi )\), and \((d_4, d_5, d_6)=(d_z, d_x, d_y)\).
The control goal of this article is to design an event-triggered-based adaptive finite-time fault-tolerant control scheme for a quadrotor UAV, which ensures the position and attitude outputs quickly track the reference trajectories in a finite time and guarantees the finite-time boundedness of all closed-loop system signals.
Assumption 1
For \(i=3, 4, 5, 6\), the reference trajectories \(\eta _i^d\) and its first-order derivative \({\dot{\eta }}_i^d\) are continuous and bounded.
2.2 Fuzzy Logic System
Fuzzy logic system uses fuzzy If-then rules to realize the mapping from input vector \(x=[x_1, x_2, \ldots , x_n]^{\top }\) to output variable \(y\in U\), and the lth If-then rule can be indicated as: \(R^l:.\) For \(l=1,\ldots , N\), if \(x_1=F_1^l\), \(x_2=F_2^l,\ldots\), and \(x_n=F_n^l\), then \(y=G^l\), where \(F_i^l\) and \(G^l\) are fuzzy sets corresponding to fuzzy membership functions \(\mu _{F_i^l}(x_i)\) and \(\mu _{G^l}(y)\), and N is the number of fuzzy rules. If the methods of single-point fuzzification, product reasoning, and center-weighted defuzzification are adopted, the fuzzy logic system can be expressed as \(y(x)={\sum \nolimits _{l=1}^N{\bar{y}}_l\prod \nolimits _{i=1}^n \mu _{F_i^l}(x_i)}/{\sum \nolimits _{l=1}^N\prod \nolimits _{i=1}^n\mu _{F_i^l}(x_i)},\) where \({\bar{y}}_l=\max \nolimits _{y\in U}\mu _{G^l}(y)\). The following fuzzy basis functions are defined as \(\varphi _l={\prod \nolimits _{i=1}^n\mu _{F_i^l}(x_i)}/{\sum \nolimits _{l=1}^N \prod _{i=1}^n\mu _{F_i^l}(x_i)}\). Let \(\Xi =[{\bar{y}}_1, {\bar{y}}_2,\ldots , {\bar{y}}_N]^\top =[\Xi _1, \Xi _2,\ldots , \Xi _N]^\top\) and \(\varphi ^\top (x)=[\varphi _1(x), \varphi _2(x),\ldots , \varphi _N(x)]\), then the fuzzy logic system can be expressed as \(y(x)=\Xi ^\top \varphi (x)\).
Lemma 1
([46]) Assume that f(x) is a continuous function defined on the compact set \(\Omega\), for any given constant \({{\bar{\omega }}}>0\), there exists a fuzzy logic system such that
2.3 Finite-Time Control
Definition 1
([47]) For the nonlinear system \({\dot{\Upsilon }}=\beth (\Upsilon )\) with the initial condition \(\Upsilon (t_0)=\Upsilon _0\), if there exist a positive constant \(\hslash\) and the setting time \(t^*(\hslash , \Upsilon _0)\) to make \(\Vert \Upsilon (t)\Vert <\hslash\) for all \(t>t_0+t^*\), then the equilibrium \(\Upsilon =0\) of the nonlinear system \({\dot{\Upsilon }}=\beth (\Upsilon )\) is semi-global practical finite-time stable.
Lemma 2
([48]) For the given scalars \(0<{\mathfrak {n}}<1\), \({\mathfrak {w}}_1>0\), \({\mathfrak {w}}_2>0\), and \(0<{\mathfrak {w}}_3<\infty\), if there exists a continuous positive definite function \({\L }(\Upsilon )\) in relation to the nonlinear system \({\dot{\Upsilon }}=\beth (\Upsilon )\) such that \(\dot{{\L }}(\Upsilon )\le -{\mathfrak {w}}_1{\L }(\Upsilon )- {\mathfrak {w}}_2{\L }(\Upsilon )^{\mathfrak {n}}+{\mathfrak {w}}_3\), then the solution of \({\dot{\Upsilon }}=\beth (\Upsilon )\) is semi-global practical finite-time stable, where the upper bound of the setting time \(t^*\) is \(t^*\le \max \left\{ t_0+\frac{1}{\pi _0{\mathfrak {w}}_1(1-{\mathfrak {n}})} \ln \frac{\pi _0{\mathfrak {w}}_1{\L }^{1-{\mathfrak {n}}}(t_0)+{\mathfrak {w}}_2}{{\mathfrak {w}}_2}, t_{0}+\frac{1}{{\mathfrak {w}}_1(1-{\mathfrak {n}})}\ln \frac{{\mathfrak {w}} _{1}{\L }^{1-{\mathfrak {n}}}(t_0)+\pi _{0}{\mathfrak {w}}_2}{\pi _{0}{\mathfrak {w}}_2}\right\}\), and \(\pi _{0}\) satisfies \(0<\pi _{0}<1\).
2.4 Useful Lemmas
Lemma 3
([49]) Suppose that \(\gimel (\mathcal {P},\mathcal {Q})>0\) stands for a real-valued function, and A and B are the constants greater than zero, and one has
Lemma 4
([50]) For \(p=1,\cdots , q\), \(0<\mathcal {G}\le 1\), and \(\mathcal {T}_p\in {\mathbb {R}}\), the following inequality can be obtained
3 Finite-Time Fault-Tolerant Controller Design
In this section, the adaptive finite-time fault-tolerant control scheme for attitude subsystem and position subsystem of the quadrotor UAV is presented based on the event-triggered mechanism and CFB design method, respectively.
3.1 Controller Design for Attitude Subsystem
Defining the tracking errors as \(\upsilon _{i,1}=\eta _i-\eta _i^d\) and \(\upsilon _{i,2}={{\dot{\eta }}}_i-\alpha _{i,1}^c\). \(\zeta _{i,1}=\upsilon _{i,1}-z_{i,1}\) and \(\zeta _{i,2}=\upsilon _{i,2}-z_{i,2}\) are the compensated tracking errors, \(i=1,2,3\), where \(\eta _i^d\) denotes the reference trajectory; \(z_{i,1}, z_{i,2}\) are EC signals which will be given later. \(\alpha _{i,1}^c\) is the filter output with the virtual control law \(\alpha _{i,1}\) as input, where the following finite-time command filter [51] is adopted:
where \({\mathfrak {K}}_i\), \({\mathfrak {L}}_{i,1}\), and \({\mathfrak {L}}_{i,2}\) are positive constants, \(\epsilon _{i,1}=\alpha _{i,1}^c\) and \(\epsilon _{i,2}={{\dot{\alpha }}}_{i,1}^c\).
The virtual control law \(\alpha _{i,1}\) and EC signal \(z_{i,1}\) are designed as
where \({\mathfrak {p}}_{i,1}\), \({\mathfrak {q}}_{i,1}\), and \({\mathfrak {r}}_{i,1}\) are positive design constants; \(1/2<{\mathfrak {n}}={\mathfrak {n}}_1/{\mathfrak {n}}_2<1\), \({\mathfrak {n}}_1\), and \({\mathfrak {n}}_2\) are positive odd integers. From (5) and (6), the time derivative of \(\zeta _{i,1}\) is computed as
Remark 1
Note that the conventional backstepping control schemes for the quadrotor UAV [8,9,10] require repeated derivation of the virtual control law, which result in the issue of “explosion of complexity”. In this paper, the finite-time command filter is introduced to quickly obtain \(\alpha _{i,1}^c\) and \({{\dot{\alpha }}}_{i,1}^c\) to replace \(\alpha _{i,1}\) and its derivative \({\dot{\alpha }}_{i,1}\), thus reducing the computational complexity of the proposed control algorithm.
Differentiating \(\zeta _{i,2}\) together with (2) yields
From Lemma 1, the fuzzy logic system can be utilized to approximate the unknown nonlinear function \(f_i=\Xi _i^{*\top }\varphi _i+\omega _i\), \(\mid \omega _i\mid \le {{\bar{\omega }}}_i\), where \({{\bar{\omega }}}_i\) is a positive constant; \(\Xi _i^*\) is the weight vector. \({\hat{\Gamma _i}}\) is the estimation of the unknown constant, \(\Gamma _i=\Vert \Xi _i^*\Vert ^2\), and \({\tilde{\Gamma }}_i=\Gamma _i-{\hat{\Gamma _i}}\) is the estimation error. Using Lemma 3, one has
where \({\mathfrak {h}}_i>0\) is a constant. Define \(\Lambda _i=b_i\), and \({\tilde{\Lambda }}_i=\Lambda _i-{\hat{\Lambda _i}}\) is the estimation error. The virtual control law \(\alpha _{i,2}\) and EC signal \(z_{i,2}\) are given as
where \({\mathfrak {p}}_{i,2}\), \({\mathfrak {q}}_{i,2}\), and \({\mathfrak {r}}_{i,2}\) are positive design parameters. The parameter tuning laws \(\hat{\Lambda }_i\) and \(\hat{\Gamma }_i\) are selected as
where \({\mathfrak {k}}_{i,j}>0\) and \({\mathfrak {l}}_{i,j}>0\) are constants.
In light of ETC strategy, the intermediate control law \(\beta _i\) is designed as
where \(0<\mu _i<1\) and \(\kappa _i>0\). For all \(t\in [t_{k,i}, t_{k+1,i})\), \(u_i^a(t)=\beta _i(t_{k,i})\) indicates the actual control law. Define \(e_i(t)=\beta _i(t)-u_i^a(t)\) and construct the event-triggered mechanism as
where \(\varsigma _{i,1}\) and \(\varsigma _{i,2}\) are design parameters satisfying \(\varsigma _{i,1}>\varsigma _{i,2}/(1-\mu _i)\). \(t_{k,i}, k\in {\mathbb {Z}}^+\), is the label of update moment. When (16) is satisfied, t is labeled as \(t_{k+1,i}\) and the intermediate control law \(\beta _i(t_{k+1,i})\) is transmitted to the actual control law \(u_i^a(t)\), otherwise \(u_i^a(t)\) remains the constant \(\beta _i(t_{k,i})\) until the next triggered moment. Using (16), \(u_i^a(t)\) can be alternated by
with \(\mid \Phi _{i,1}(t)\mid \le 1\) and \(\mid \Phi _{i,2}(t)\mid \le 1\) being continuous time-varying functions.
3.2 Controller Design for Position Subsystem
Define \(\upsilon _{i,1}=\eta _i-\eta _i^d, \upsilon _{i,2}={{\dot{\eta }}}_i-\alpha _{i,1}^c\), \(i=4,5,6\), as the tracking errors, where \(\eta _i^d\) represents the reference trajectory; \(\alpha _{i,1}\) is the virtual control law; and \(\alpha _{i,1}^c=\epsilon _{i,1}\) and \({{\dot{\alpha }}}_{i,1}^c=\epsilon _{i,2}\). Define the compensated tracking errors as \(\zeta _{i,1}=\upsilon _{i,1}-z_{i,1}, \zeta _{i,2}=\upsilon _{i,2}-z_{i,2}\) with \(z_{i,1}, z_{i,2}\) being EC signals.
Design the virtual control law \(\alpha _{i,1}\) and EC signal \(z_{i,1}\) as
where \({\mathfrak {p}}_{i,1}\), \({\mathfrak {q}}_{i,1}\), and \({\mathfrak {r}}_{i,1}\) are positive design parameters. Using (18) and (19), \({{\dot{\zeta }}}_{i,1}\) is computed as
According to (3), the time derivative of \(z_{i,2}\) can be obtained as
The virtual control law \(\alpha _{i,2}\) and EC signal \(z_{i,2}\) are constructed as
where \({\mathfrak {p}}_{i,2}\), \({\mathfrak {q}}_{i,2}\), and \({\mathfrak {r}}_{i,2}\) are positive constants. \(\Lambda _i=b_i\); \({\hat{\Lambda _i}}\) is the estimation of \(\Lambda _i\) and \({\tilde{\Lambda }}_i=\Lambda _i-{\hat{\Lambda _i}}\). The parameter tuning law \(\hat{\Lambda }_i\) is consequently chosen as
with \({\mathfrak {k}}_{i,1}\) and \({\mathfrak {l}}_{i,1}\) being positive design parameters.
By applying the ETC approach to the position subsystem (3), the intermediate control law \(\beta _i\) is given as
where \(0<\mu _i<1\) and \(\kappa _i>0\). The actual control law \(u_i^a\) and the event-triggered mechanism are given by
where \(e_i(t)=\beta _i(t)-u_i^a(t)\), \(\varsigma _{i,1}>\varsigma _{i,2}/(1-\mu _i)\), and \(\varsigma _{i,2}>0\). \(t_{k,i}, k\in {\mathbb {Z}}^+\), is the controller update time. If \(t\in [t_{k,i}, t_{k+1,i})\), the actual control law \(u_i^a(t)\) remains a constant \(\beta _i(t_{k,i})\); when the event-triggered mechanism (27) is triggered, the time instant is noted as \(t_{k+1,i}\) and the intermediate control law \(\beta _i(t_{k+1,i})\) is applied to \(u_i^a(t)\). Moreover, on the basis of (27), one yields
where \(\mid \Phi _{i,1}(t)\mid \le 1\) and \(\mid \Phi _{i,2}(t)\mid \le 1\) are continuous time-varying functions.
Based on the coupling among the total lift force \(\tau _T\), the reference trajectories of roll angle \(\eta _1^d\) and pitch angle \(\eta _2^d\), the control inputs of position subsystem \(u_4^f, u_5^f, u_6^f\), and the yaw angle \(\eta _3\), the following equalities can be obtained
In summary, the above fuzzy approximation-based event-triggered adaptive finite-time fault-tolerant control design procedures for the quadrotor UAV is presented in Fig. 1.

The fuzzy approximation-based event-triggered adaptive finite-time fault-tolerant control block diagram
4 Stability Analysis
Theorem 1
Consider the quadrotor UAV (1) under Assumption 1, the event-triggered adaptive finite-time fault-tolerant control scheme, including the control laws (5), (11), (18), (22), the EC signals (6), (12), (19), (23), and the parameter tuning laws (13), (14), (24) ensures that the attitude and position tracking errors converge to a sufficient neighborhood around origin in a finite time, while all signals of the attitude and position subsystems are finite-time bounded.
Proof
The detailed proof for the Theorem 1 is given as follows:
Step 1: Select the Lyapunov function as \(V_1=\frac{1}{2}\sum \limits _{i=1}^6\left( \zeta _{i,1}^2+z_{i,1}^2\right)\). The time derivative of \(V_1\) together with (6), (7), (19), and (20) is calculated as
Step 2: Consider the Lyapunov function \(V_2=V_1+\frac{1}{2}\sum \limits _{i=1}^6\left( \zeta _{i,2}^2+z_{i,2}^2+\frac{1}{{\mathfrak {k}}_{i,1}}\tilde{\Lambda }_i^2\right) +\sum \limits _{i=1}^3\frac{1}{2{\mathfrak {k}}_{i,2}}\tilde{\Gamma }_i^2\). From (8) and (21), the time derivative of \(V_2\) is given as
Invoking (9), (10), (15), (17), (25), and (28) into (30) results in
Based on [, Theorem 1], one has 52\(\mid \alpha _{i,1}^c-\alpha _{i,1}\mid ={\mathfrak {O}}_i(\delta _i^{\imath \sigma })\), where \(\imath\) and \(\sigma\) are positive constants and \({\mathfrak {O}}_i(\delta _i^{\imath \sigma })\) is the \(\delta _i^{\imath \sigma }\) order approximation error. Furthermore, the following inequality holds
From (11)–(14), (22)–(24), and (29), (32) and on the basis of the inequality that \(0\le \mid \vartheta \mid -\vartheta \tanh ({\vartheta }/{\kappa _i})\le 0.2785\kappa _i\), it follows that
According to Lemma 3, the following inequalities can be obtained
Then, substituting (34)–(36) into (33) yields
Furthermore, the inequality (37) can be rewritten as
where \({\mathfrak {w}}_1=\min \left\{ 2{\mathfrak {p}}_{i,1}, 2({\mathfrak {p}}_{i,1}-\frac{1}{2}), 2{\mathfrak {p}}_{i,2}, \frac{{\mathfrak {l}}_{i,1}}{2}, \frac{{\mathfrak {l}}_{j,2}}{2}\right\}\), \({\mathfrak {w}}_2=\min \left\{ 2^{\frac{1+{\mathfrak {n}}}{2}}({\mathfrak {q}}_{i,1}-\frac{{\mathfrak {r}}_{i,1}}{1+{\mathfrak {n}}}),2^{\frac{1+{\mathfrak {n}}}{2}}\frac{{\mathfrak {r}}_{i,1}}{1+{\mathfrak {n}}}, 2^{\frac{1+{\mathfrak {n}}}{2}}({\mathfrak {q}}_{i,2}-\frac{{\mathfrak {r}}_{i,2}}{1+{\mathfrak {n}}}),2^{\frac{1+{\mathfrak {n}}}{2}}\frac{{\mathfrak {r}}_{i,2}}{1+{\mathfrak {n}}}, {\mathfrak {l}}_{i,1}, {\mathfrak {l}}_{j,2}\right\}\), and \({\mathfrak {w}}_3=\sum \limits _{i=1}^6\left\{ \frac{{\mathfrak {l}}_{i,1}}{2{\mathfrak {k}}_{i,1}}\Lambda _i^2\right. \left. +{\mathfrak {l}}_{i,1}\frac{1-{\mathfrak {n}}}{2}\left( 1+{\mathfrak {n}}\right) ^{\frac{1+{\mathfrak {n}}}{1-{\mathfrak {n}}}}+\frac{1}{2}{\bar{d}}_i^2+0.557g_i\rho _i\kappa _i+\frac{1}{2}{{\mathfrak {O}}_i}\left( \delta _i^{2\imath \sigma }\right) \right\} +\frac{1}{2}\sum \limits _{j=1}^3\left\{ {\mathfrak {h}}_j^2+{{\bar{\omega }}}_j^2\right\} +\sum \limits _{j=1}^3\left\{ \frac{{\mathfrak {l}}_{j,2}}{2{\mathfrak {k}}_{j,2}}\Gamma _j^2+{\mathfrak {l}}_{j,2}\frac{1-{\mathfrak {n}}}{2}\left( 1+{\mathfrak {n}}\right) ^{\frac{1+{\mathfrak {n}}}{1-{\mathfrak {n}}}}\right\} .\) From (38), we consider the following two cases.
Case 1. For \(0<\pi _0<1\), \({\dot{V}}_2\le -\pi _0{\mathfrak {w}}_1V_2-(1-\pi _0){\mathfrak {w}}_1V_2-{\mathfrak {w}}_2V_2^{\frac{1+{\mathfrak {n}}}{2}}+{\mathfrak {w}}_3\). If \(V_2>{\mathfrak {w}}_3/((1-\pi _0){\mathfrak {w}}_1)\), it can be derived that \({\dot{V}}_2\le -\pi _0{\mathfrak {w}}_1V_2-{\mathfrak {w}}_2V_2^{\frac{1+{\mathfrak {n}}}{2}}\). According to Lemma 1, one has
within the finite time
Case 2. \({\dot{V}}_2\le -{\mathfrak {w}}_1V_2-\pi _0{\mathfrak {w}}_2V_2^{\frac{1+{\mathfrak {n}}}{2}}-(1-\pi _0){\mathfrak {w}}_2V_2^{\frac{1+{\mathfrak {n}}}{2}}+{\mathfrak {w}}_3\), where \(0<\pi _0<1\). \({\dot{V}}_2\le -{\mathfrak {w}}_1V_2-\pi _0{\mathfrak {w}}_2V_2^{\frac{1+{\mathfrak {n}}}{2}}\) is obtained when \(V_2^{\frac{1+{\mathfrak {n}}}{2}}>{\mathfrak {w}}_3/((1-\pi _0){\mathfrak {w}}_2)\). In the same way, it can be achieved that
in a finite time
From the discussion of the above two cases, it can be further obtained that the finite-time boundedness of all signals \(\zeta _{i,1}\), \(z_{i,1}\), \(\zeta _{i,2}\), \(z_{i,2}\), \({\tilde{\Lambda }}_i\), and \({\tilde{\Gamma }}_j\) in the closed-loop system. Namely, \(\zeta _{i,1}\) and \(z_{i,1}\) will converge into the region
in a finite time
For \(t\ge t_3^*\), \(\upsilon _{i,1}\) reaches the following region
Obviously, the tracking errors of attitude and position subsystems can be regulated to a sufficient neighborhood around origin in a finite time \(t_3^*\) through the selection of appropriate control design parameters.
Notice that for the definitions in (16) and (27), for arbitrary positive integer k, there exists \(t^*>0\) such that \(t_{k+1,i}-t_{k,i}\le t^*\). To this end, by recalling \(e_i(t)=\beta _i(t)-u_i^a(t)\), \(t\in [t_{k,i}, t_{k+1,i})\), one has \(\mathrm {d}\mid e_i\mid /\mathrm {d}t=\mathrm {sign}(e_i){\dot{e}}_i\le \mid {{\dot{\beta }}}_i\mid\). Furthermore, by substituting (15) and (25) into (17) and (28), one has
where \({{\bar{\beta }}}_i\) is the upper bound of \(\mid {{\dot{\beta }}}_i\mid\). Then it can be derived that \({\dot{\beta }}_i\) is bounded and the Zeno behavior can be successfully avoided. \(\square\)
Remark 2
The radius of region for attitude and position tracking errors are closely related to the designed parameters \({\mathfrak {p}}_{i,j}\), \({\mathfrak {q}}_{i,j}\), \({\mathfrak {r}}_{i,j}\), \({\mathfrak {h}}_i\), \({\mathfrak {k}}_{i,j}\), and \({\mathfrak {l}}_{i,j}\). The larger parameters \({\mathfrak {p}}_{i,j}\), \({\mathfrak {q}}_{i,j}\), and \({\mathfrak {k}}_{i,j}\) and the smaller parameters \({\mathfrak {r}}_{i,j}\), \({\mathfrak {h}}_i\), and \({\mathfrak {l}}_{i,j}\) can enable the faster setting time and smaller convergence region.
5 Simulation Results
In this section, the comparison simulations are implemented to show the effectiveness of the developed fuzzy approximation-based event-triggered adaptive finite-time fault-tolerant control algorithm. The physical parameters of quadrotor UAV are listed in Table 1.
The parameters of actuator faults are given as \(\rho _i=0.8\). When \(t\ge 8\), \(b_1=5\sin {t}\), \(b_2=3\cos {t}\), and \(b_3=4\cos (2t)\), and when \(t\ge 10\), \(b_4=5\cos (0.5t)\), \(b_5=4\sin {t}\), and \(b_6=3\sin (2t)\). The reference trajectories are given as \([\eta _3^d, \eta _4^d, \eta _5^d, \eta _6^d]=[0, t/8, \sin (\pi t/9), \cos (\pi t/9)]\). In the simulations, the initial conditions are set as \([\eta _1, \eta _2, \eta _3, \eta _4, \eta _5, \eta _6]=[0, 0, \pi /4, 1, 1, 0]\). The control design parameters are chosen as \({\mathfrak {K}}_i=0.01\), \({\mathfrak {L}}_{i,1}=8\), and \({\mathfrak {L}}_{i,2}=5\); \({\mathfrak {p}}_{i,1}=2\), \({\mathfrak {p}}_{i,2}=3\), \({\mathfrak {q}}_{i,1}={\mathfrak {r}}_{i,1}=3\), \({\mathfrak {q}}_{i,2}={\mathfrak {r}}_{i,2}=4\), \({\mathfrak {k}}_{i,1}={\mathfrak {k}}_{i,2}=2\), \({\mathfrak {l}}_{i,1}=3\), \({\mathfrak {l}}_{i,2}=5\), and \({\mathfrak {h}}_i=0.1\); \(\mu _i=0.5\), \(\kappa _i=10\), \(\varsigma _{i,1}=5\), \(\varsigma _{1,2}=\varsigma _{2,2}=\varsigma _{3,2}=2\), and \(\varsigma _{4,2}=\varsigma _{5,2}=\varsigma _{6,2}=1\).
The simulation results are shown in Figs. 2, 3, 4, 5, 6, and 7. The curves of the attitude and position outputs \(\eta _i\) and the reference trajectories \(\eta _i^d\) are depicted in Fig. 2. The curves of parameter tuning laws \({\hat{\Gamma _i}}\) are plotted in Fig. 3. The curves of event-triggered control laws \(u_i^a\) and its triggering time intervals of control inputs for attitude and position subsystems are revealed in Figs. 4, 5, 6, and 7, respectively. Moreover, the data of control signal transmission times of the time-triggered control (TTC) algorithm and ETC algorithm are given in Table 2. It can be observed that the outputs of attitude and position subsystems can still precisely track the reference trajectories even suffer from actuator faults. The execution number of actuators is reduced without significantly reducing system performance.

The curves of reference trajectories and system outputs

The curves of parameter tuning laws \({\hat{\Lambda} _i}\)

The curves of event-triggered control laws of attitude subsystem

The curves of the triggering interval of attitude control laws

The curves of event-triggered control laws of position subsystem

The curves of the triggering interval of position control laws
Remark 3
The trial-and-error method for adjusting control design parameters is implemented for better control action and tracking performance. Nevertheless, there is still a deficiency of many design parameters, which will be improved in future based on learning and optimal approaches [53, 54].
At last, the comparison simulations with the FTCFB, CFB, and DSC are performed to demonstrate the superiority of the proposed algorithm. The control design parameters for CFB algorithm and DSC algorithm are identical to the FTCFB algorithm. The simulation results are shown in Fig. 8, with which the modified attitude and position tracking errors \(\upsilon _{i,1}=\eta _i-\eta _i^d\) are applied to evaluate the performance of three algorithms. It can be observed that the proposed event-triggered-based FTCFB control algorithm can achieve the desired performance with a smaller tracking error and a faster convergence rate.

The curves of attitude and position tracking errors under different control schemes
6 Conclusion
In this article, the problem of event-triggered adaptive finite-time fault-tolerant control for a quadrotor UAV has been considered. By combining finite-time command filter and fractional power error compensation mechanism into the framework of backstepping design method, the issue of “explosion of complexity” and the effect of filtered error have been skillfully solved. The proposed event-triggered-based fault-tolerant control scheme has decreased the communication resources in spite of the quadrotor UAV suffering from actuator faults. It has been proven that the tracking errors of the attitude and position subsystems approach to a small neighborhood near the origin in a finite time. In future study, the fuzzy approximation-based event-triggered adaptive finite-time output feedback control for the quadrotor UAV will be considered.
References
Dierks, T., Jagannathan, S.: Output feedback control of a quadrotor UAV using neural networks. IEEE Trans. Neural Netw. 21(1), 50–66 (2009)
Xian, B., Guo, J., Zhang, Y.: Adaptive backstepping tracking control of a 6-dof unmanned helicopter. IEEE/CAA J. Autom. Sin. 2(1), 19–24 (2015)
Liu, H., Li, D., Zuo, Z., Zhong, Y.: Robust three-loop trajectory tracking control for quadrotors with multiple uncertainties. IEEE Trans. Ind. Electron. 63(4), 2263–2274 (2016)
Shao, S., Chen, M.: Adaptive neural discrete-time fractional-order control for a UAV system with prescribed performance using disturbance observer. IEEE Trans. Syst. Man Cybern.: Syst. 51(2), 742–754 (2021)
Seyedtabaii, S.: New flat phase margin fractional order pid design: Perturbed UAV roll control study. Robot. Auton. Syst. 96, 58–64 (2017)
Zheng, E., Xiong, J., Luo, J.: Second order sliding mode control for a quadrotor UAV. ISA Trans. 53(4), 1350–1356 (2014)
Wang, B., Zhang, Y.: An adaptive fault-tolerant sliding mode control allocation scheme for multirotor helicopter subject to simultaneous actuator faults. IEEE Trans. Ind. Electron. 65(5), 4227–4236 (2017)
Wang, R., Liu, J.: Trajectory tracking control of a 6-DOF quadrotor UAV with input saturation via backstepping. J. Frankl. Inst. 355(7), 3288–3309 (2018)
Yu, G., Cabecinhas, D., Cunha, R., Silvestre, C.: Nonlinear backstepping control of a quadrotor-slung load system. IEEE/ASME Trans. Mechatron. 24(5), 2304–2315 (2019)
Xie, W., Cabecinhas, D., Cunha, R., Silvestre, C.: Adaptive backstepping control of a quadcopter with uncertain vehicle mass, moment of inertia, and disturbances. IEEE Trans. Ind. Electron. 69(1), 549–559 (2022)
Shao, X., Liu, J., Cao, H., Shen, C., Wang, H.: Robust dynamic surface trajectory tracking control for a quadrotor UAV via extended state observer. Int. J. Robust Nonlinear Control 28(7), 2700–2719 (2018)
Shen, Z., Li, F., Cao, X., Guo, C.: Prescribed performance dynamic surface control for trajectory tracking of quadrotor uav with uncertainties and input constraints. Int. J. Control 94(11), 2945–2955 (2021)
Wu, X., Zheng, W., Zhou, X., Shao, S.: Adaptive dynamic surface and sliding mode tracking control for uncertain QUAV with time-varying load and appointed-time prescribed performance. J. Frankl. Inst. 358(8), 4178–4208 (2021)
Aboudonia, A., El-Badawy, A., Rashad, R.: Active anti-disturbance control of a quadrotor unmanned aerial vehicle using the command-filtering backstepping approach. Nonlinear Dyn. 90, 581–597 (2017)
Cao, L., Wang, Y., Zhang, S., Fei, T.: Command-filtered sensor-based backstepping controller for small unmanned aerial vehicles with actuator dynamics. Int. J. Syst. Sci. 49(16), 3365–3376 (2018)
Liu, K., Wang, R.: Antisaturation command filtered backstepping control based disturbance rejection for a quadarotor UAV. IEEE Trans. Circuits Syst. II: Express Briefs 68(12), 3577–3581 (2021)
Sofianos, N.A., Boutalis, Y.S.: Robust adaptive multiple models based fuzzy control of nonlinear systems. Neurocomputing 173, 1733–1742 (2016)
Zhou, Q., Li, H., Wu, C., Wang, L., Ahn, C.K.: Adaptive fuzzy control of nonlinear systems with unmodeled dynamics and input saturation using small-gain approach. IEEE Trans. Syst. Man Cybern.: Syst. 47(8), 1979–1989 (2017)
Fan, X., Bai, P., Li, H., Deng, X., Lv, M.: Adaptive fuzzy finite-time tracking control of uncertain non-affine multi-agent systems with input quantization. IEEE Access 8, 187623–187633 (2020)
Song, S., Park, J.H., Zhang, B., Song, X.: Event-based adaptive fuzzy fixed-time secure control for nonlinear CPSs against unknown false data injection and backlash-like hysteresis. IEEE Trans. Fuzzy Syst. 30(6), 1939–1951 (2022)
Su, H., Hu, Y., Karimi, H.R., Knoll, A., Ferrigno, G., De Momi, E.: Improved recurrent neural network-based manipulator control with remote center of motion constraints: Experimental results. Neural Netw. 131, 291–299 (2020)
Su, H., Qi, W., Hu, Y., Karimi, H.R., Ferrigno, G., De Momi, E.: An incremental learning framework for human-like redundancy optimization of anthropomorphic manipulators. IEEE Trans. Ind. Inform. 18(3), 1864–1872 (2022)
Song, S., Park, J.H., Zhang, B., Song, X.: Adaptive NN finite-time resilient control for nonlinear time-delay systems with unknown false data injection and actuator faults. IEEE Trans. Neural Netw. Learn. Syst. (2021). https://doi.org/10.1109/TNNLS.2021.3070623
Tran, V.P., Santoso, F., Garratt, M.A., Petersen, I.R.: Adaptive second-order strictly negative imaginary controllers based on the interval type-2 fuzzy self-tuning systems for a hovering quadrotor with uncertainties. IEEE/ASME Trans. Mechatron. 25(1), 11–20 (2020)
Hua, C., Jiang, A., Li, K.: Adaptive neural network finite-time tracking quantized control for uncertain nonlinear systems with full-state constraints and applications to QUAVs. Neurocomputing 440(14), 264–274 (2021)
Zhang, X., Wang, Y., Zhu, G., Chen, X., Li, Z., Wang, C., Su, C.Y.: Compound adaptive fuzzy quantized control for quadrotor and its experimental verification. IEEE Trans. Cybern. 51(3), 1121–1133 (2021)
Wang, J., Wang, P., Ma, X.: Adaptive event-triggered control for quadrotor aircraft with output constraints. Aerosp. Sci. Technol. 105, 105935 (2020)
Zhu, X.Z., Casau, P., Silvestre, C.: Event-triggered global trajectory tracking control of a quadrotor: synthesis, simulations, and experiments. Int. J. Robust Nonlinear Control 31(13), 6144–6165 (2021)
Tian, B., Cui, J., Lu, H., Liu, L., Zong, Q.: Attitude control of uavs based on event-triggered supertwisting algorithm. IEEE Trans. Ind. Inform. 17(2), 1029–1038 (2021)
Lin, X., Liu, J., Yu, Y., Sun, C.: Event-triggered reinforcement learning control for the quadrotor UAV with actuator saturation. Neurocomputing 415, 135–145 (2020)
Shao, S., Chen, M., Hou, J., Zhao, Q.: Event-triggered-based discrete-time neural control for a quadrotor UAV using disturbance observer. IEEE/ASME Trans. Mechatron. 26(2), 689–699 (2021)
Wang, H., Kang, S., Feng, Z.: Finite-time adaptive fuzzy command filtered backstepping control for a class of nonlinear systems. Int. J. Fuzzy Syst. 21, 2575–2587 (2019)
Diao, S., Sun, W., Wang, L., Wu, J.: Finite-time adaptive fuzzy control for nonlinear systems with unknown backlash-like hysteresis. Int. J. Fuzzy Syst. 23, 2037–2047 (2021)
Du, H., Zhu, W., Wen, G., Wu, D.: Finite-time formation control for a group of quadrotor aircraft. Aerosp. Sci. Technol. 69, 609–616 (2017)
Tian, B., Cui, J., Lu, H., Zuo, Z., Zong, Q.: Adaptive finite-time attitude tracking of quadrotors with experiments and comparisons. IEEE Trans. Ind. Electron. 66(12), 9428–9438 (2019)
Chen, Q., Ye, Y., Hu, Z., Na, J., Wang, S.: Finite-time approximation-free attitude control of quadrotors: theory and experiments. IEEE Trans. Aerosp. Electron. Syst. 57(3), 1780–1792 (2021)
Eliker, K., Grouni, S., Tadjine, M., Zhang, W.: Practical finite time adaptive robust flight control system for quad-copter UAVs. Aerosp. Sci. Technol. 98, 105708 (2020)
Mofid, O., Mobayen, S.: Adaptive finite-time back-stepping global sliding mode tracker of quad-rotor UAVs under model uncertainty, wind perturbation and input saturation. IEEE Trans. Aerosp. Electron. Syst. (2021). https://doi.org/10.1109/TAES.2021.3098168
Lanzon, A., Freddi, A., Longhi, S.: Flight control of a quadrotor vehicle subsequent to a rotor failure. J. Guid. Control Dyn. 37(2), 580–591 (2014)
Chen, F., Jiang, R., Zhang, K., Jiang, B., Tao, G.: Robust backstepping sliding-mode control and observer-based fault estimation for a quadrotor UAV. IEEE Trans. Ind. Electron. 63(8), 5044–5056 (2016)
Hao, W., Xian, B.: Nonlinear adaptive fault-tolerant control for a quadrotor UAV based on immersion and invariance methodology. Nonlinear Dyn. 90, 2813–2826 (2017)
Yu, Z., Liu, Z., Zhang, Y., Qu, Y., Su, C.Y.: Distributed finite-time fault-tolerant containment control for multiple unmanned aerial vehicles. IEEE Trans. Neural Netw. Learn. Syst. 31(6), 2077–2091 (2020)
Liu, K., Wang, R., Wang, X., Wang, X.: Anti-saturation adaptive finite-time neural network based fault-tolerant tracking control for a quadrotor UAV with external disturbances. Aerosp. Sci. Technol. 115, 106790 (2021)
Yu, Z., Zhang, Y., Liu, Z., Qu, Y., Su, C.Y., Jiang, B.: Decentralized finite-time adaptive fault-tolerant synchronization tracking control for multiple UAVs with prescribed performance. J. Frankl. Inst. 357(16), 11830–11862 (2020)
Li, Y., Ma, Z., Tong, S.: Adaptive fuzzy fault-tolerant control of nontriangular structure nonlinear systems with error constraint. IEEE Trans. Fuzzy Syst. 26(4), 2062–2074 (2018)
Wang, L.: Adaptive fuzzy systems and control: design and stability analysis. Prentice-Hall, Englewood Cliffs (1994)
Wang, F., Chen, B., Lin, C., Zhang, J., Meng, X.: Adaptive neural network finite-time output feedback control of quantized nonlinear systems. IEEE Trans. Cybern. 48(6), 1839–1848 (2017)
Yu, J., Shi, P., Zhao, L.: Finite-time command filtered backstepping control for a class of nonlinear systems. Automatica 92, 173–180 (2018)
Qian, C., Lin, W.: A continuous feedback approach to global strong stabilization of nonlinear systems. IEEE Trans. Autom. Control 46(7), 1061–1079 (2001)
Hardy, G.H., Littlewood, J.E., Pólya, G., Pólya, G., Littlewood, D.: Inequalities. Cambridge University Press, Cambridge (1952)
Cui, G., Yu, J., Wang, Q.G.: Finite-time adaptive fuzzy control for mimo nonlinear systems with input saturation via improved command-filtered backstepping. IEEE Trans. Syst. Man Cybern.: Syst. 52(2), 980–989 (2022)
Wang, X., Chen, Z., Yang, G.: Finite-time-convergent differentiator based on singular perturbation technique. IEEE Trans. Autom.Control 52(9), 1731–1737 (2007)
Qi, W., Aliverti, A.: A multimodal wearable system for continuous and real-time breathing pattern monitoring during daily activity. IEEE J. Biomed. Health Inform. 24(8), 2199–2207 (2020)
Qi, W., Ovur, S.E., Li, Z., Marzullo, A., Song, R.: Multi-sensor guided hand gesture recognition for a teleoperated robot using a recurrent neural network. IEEE Robot. Autom. Lett. 6(3), 6039–6045 (2021)
Acknowledgements
This work was supported in part by the Natural Science Fund for Excellent Young Scholars of Jiangsu Province under Grant BK20211605.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Yang, W., Cui, G., Li, Z. et al. Fuzzy Approximation-Based Adaptive Finite-Time Tracking Control for a Quadrotor UAV with Actuator Faults. Int. J. Fuzzy Syst. 24, 3756–3769 (2022). https://doi.org/10.1007/s40815-022-01361-5
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40815-022-01361-5