
Abstract
In this paper, a filtered sliding mode control (FSMC) scheme based on fuzzy uncertainty observer (FUO) for trajectory tracking control of a quadrotor unmanned aerial vehicle (QUAV) is proposed. To be specific, the dynamics model of QUAV is decomposed into three subsystems. By virtue of the cascaded structure, sliding-mode-based virtual control laws can be recursively designed. In order to remove the smoothness requirements on intermediate signals, a series of first-order filters are employed to reconstruct sliding mode control signals together with their first derivatives. Moreover, fuzzy uncertainty observers are employed to indirectly estimate lumped unknown nonlinearities including system uncertainties and external disturbances and make compensation for the QUAV system. Stability analysis and uniformly ultimately bounded tracking errors and states can be guaranteed by the Lyapunov approach. Simulation studies demonstrate the effectiveness and superiority of the proposed tracking control scheme.
N. Wang—This work is supported by the National Natural Science Foundation of P.R. China (under Grants 51009017 and 51379002), Applied Basic Research Funds from Ministry of Transport of P.R. China (under Grant 2012-329-225-060), China Postdoctoral Science Foundation (under Grant 2012M520629), the Fund for Dalian Distinguished Young Scholars (under Grant 2016RJ10), the Innovation Support Plan for Dalian High-level Talents (under Grant 2015R065), and the Fundamental Research Funds for the Central Universities (under Grant 3132016314).
Access provided by CONRICYT-eBooks. Download conference paper PDF
Similar content being viewed by others

Keywords
- Quadrotor unmanned aerial vehicle
- Trajectory tracking control
- Sliding mode control
- Fuzzy uncertainty observer
1 Introduction
Compared with traditional single rotor UAV, the most significant advantage of the quadrotor unmanned aerial vehicles (QUAV) is that the latter has better stability, more compact structure and larger load, etc.. So the QUAV pertains to a wide area of possible applications including patrolling for forest fires, traffic monitoring, surveillance rescue, etc., and as a remarkable platform for the UAV, the QUAV has been attracting numerous research [1,2,3,4,5,6].
The QUAV is a complex nonlinear strongly coupled system with more than one input and output, and thereby leading to great challenges in controller design and synthesis. In [7], PID control scheme is used to achieve the trajectory tracking control. However, this control method is classical linear control scheme, which only work better when the QUAV is near hovering state. Backstepping control scheme has an extensive application in controlling the QUAV in recent years. In [8], the QUAV dynamic system has been divided into two subsystems, i.e., translational subsystem and rotational subsystem and two subcontrollers have been designed. However, general backstepping control schemes need accurate model parameters and is not robust to model uncertainties and external disturbances, for this reason, adaptive integral backstepping control scheme [9] has been applied in the QUAV, which Only suitable for the model uncertainty and external disturbances are slow-varying or constant. Sliding mode control is a powerful control method with characteristics of simple and robust [10]. Combining with adaptive control strategy or observer [11], this kind control methods have widespread used various systems, however, chattering phenomenon is inevitable for the continuous switching logic. Adaptive fuzzy backstepping control has been used to the trajectory tracking control for the QUAV in [12], in which the fuzzy system is employed to approximate directly a model using backstepping techniques. For the reason of underactuation, the virtual controller is designed in most control schemes for the QUAV, while, the derivative of the virtual controller will be complex. In this context, we focus on a QUAV with the lumped unknown nonlinearity including system uncertainties and external disturbances, and a filtered sliding mode trajectory tracking control scheme based on fuzzy uncertainty observer (FUO) for the QUAV is proposed.
2 QUAV Dynamics and Problem Formulation
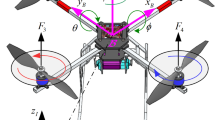
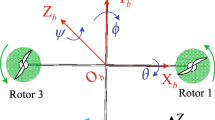
As shown in Fig. 1, defining the earth-fixed coordinate \(OX_0Y_0Z_0\) and the body-fixed coordinate \(O'XYZ\) which are respectively considered with the origin coinciding to the starting point and the gravity center of the QUAV. Vectors (x, y, z) and \((\phi , \theta , \psi )\) are respectively denote the positions of the QUAV in earth-fixed coordinate \(OX_0Y_0Z_0\) and the Euler angles in body-fixed coordinate \(O'XYZ\), in which \(\phi \) refers as to roll angle, \(\theta \) refers as to pitch angle and \(\psi \) refers as to yaw angle.

The configuration of a QUAV.

The overall control diagram.
The position dynamics can be described as follows:
with the lumped model uncertainties and/or external disturbances \(\pmb {d}_1=[d_{11},d_{12},d_{13}]^T\), \(\pmb {f}_1 = [D_x {\dot{x}}^2, D_y {\dot{y}}^2, D_z {\dot{z}}^2-g]^T\) and
where \(\pmb {\eta }_{11}=[x,y,z]^T\) and \(\pmb {\eta }_{12}=[{\dot{x}},{\dot{y}},{\dot{z}}]^T\) are vectors of the positions and linear velocities in the earth-fixed frame, respectively, m is the mass of the QUAV, g is the acceleration of the gravity, \(C_*\) and \(S_*\) are the functions \(\mathrm {cos}(*)\) and \(\mathrm {sin}(*)\), respectively, \(\tau \) is the total thrust.
The vector of Euler angles \(\pmb {\eta }_2=[\phi ,\theta ,\psi ]^T\) is governed by
with the lumped model uncertainties and/or external disturbances \(\pmb {d}_2=[d_{21},d_{22},d_{23}]^T\), and
where \(T_*\) denotes the function \(\mathrm {tan}(*)\), \(\pmb {\eta }_3=[p,q,r]^T\) is the angular velocity vector in body-fixed coordinate given by the following dynamics:
with the diagonal matrix \(\pmb {g}_3=\mathrm {diag} \left( 1/J_x,1/J_y,1/J_z\right) \) where \(J_i (i=x,y,z)\) is the moment of inertia with respect to each axis, \(\pmb {d}_3=[d_{31},d_{32},d_{33}]^T\) include unmodeled dynamics and/or external disturbances, and \(\pmb {f}_3({\pmb {\eta }_3}) = [\frac{J_y - J_z}{J_x} qr, \frac{J_z - J_x}{J_y} pr, \frac{J_x - J_y}{J_z} pq]^T\), where \(\pmb {u}_3 = [u_{31},u_{32},u_{33}]^T\) is the control input and the final control input vector of the QUAV system is \(\pmb {u} = [\tau ,\pmb {u}_3^T]^T\).
The control objective in this study is to design filtered sliding mode controller of the QUAV with FUO and achieve the trajectory tracking control \((x \rightarrow x_d, y \rightarrow y_d, z \rightarrow z_d, \psi \rightarrow \psi _d)\) in presence of the external disturbances and system uncertainties. Before ending this section, the following assumption is introduced:
Assumption 1
The desired trajectory and its time derivatives are bounded.
3 Filtered Sliding Mode Controller Design
In this section, three subcontrollers will be designed. The overall control diagram is as shown in Fig. 2.
3.1 Position Controller
Given a reference trajectory \(\pmb {\eta }_{11d}:=[x_d,y_d,z_d]^T\), combining with position dynamics (1), we design sliding surfaces as follows:
where \(\pmb {k}_{11}=\mathrm {diag}(k_{111},k_{112},k_{113})>0\), \(\pmb {k}_{12}=\mathrm {diag}(k_{121},k_{122},k_{123})>0\), \(\pmb {e}_{11} = \pmb {\eta }_{11} - \pmb {\eta }_{11d}\), \( \pmb {e}_{12} = \pmb {\eta }_{12} - \bar{\pmb {\eta }}_{12d}\), and \(\bar{\pmb {\eta }}_{12d}\) is the filtered output of the virtual control signal \(\pmb {\eta }_{12d}\) given by
here, \(\epsilon _1 > 0 \) is an user-defined filtering time constant and let \(\pmb {y}_{1} = \bar{\pmb {\eta }}_{12d} - \pmb {\eta }_{12d}\).
In this context, the virtual control signal \(\pmb {\eta }_{12d}\) can be selected as follows:
where \(\pmb {p}_{11} = \mathrm {diag}(p_{111},p_{112},p_{113})>0\) and a desired position control law for sub-system (1) can be designed as follows:
with the FUO given by
Choosing the parameter matrix update rule as
where \(r_{11} > 0\) and \(r_{12} > 0\) are user-defined positive definite parameters, \(\pmb {\omega }_1 = [\pmb {\eta }_{11}^T,\pmb {\eta }_{12}^T]^T\) is the input vector of the fuzzy system, \(\pmb {\varepsilon }_1 = \pmb {\eta }_{12} - \pmb {\upsilon }_1\) is the observation error vector with
where \(r_{13} > 0\) is user-defined positive definite parameter.
3.2 Euler Angle Controller
Substituting the control law (11) into the input nonlinearity (2), we can obtain
Let \(\pmb {\eta }_{2d}:=[\phi _d,\theta _d,\psi _d]^T\) and \(\bar{\pmb {\eta }}_{2d}:=[{\bar{\phi }}_d,{\bar{\theta }}_d,{\bar{\psi }}_d]^T\) where \(\bar{\pmb {\eta }}_{2d}\) is the filtered output of \(\pmb {\eta }_{2d}\) given by
here, \(\epsilon _2 > 0 \) is an user-defined filtering time constant and let \(\pmb {y}_{2} = \bar{\pmb {\eta }}_{2d} - \pmb {\eta }_{2d}\).
Combining with Euler angles dynamics (3), we design a sliding surface as follows:
where \(\pmb {e}_{2} = \pmb {\eta }_{2} - \bar{\pmb {\eta }}_{2d}\), \(\pmb {k}_2 = \mathrm {diag}(k_{21},k_{22},k_{23})>0\).
In this context, a desired Euler angles control law for sub-system (3) can be designed as follows:
with the FUO given by
Choosing the parameter matrix update rule as
where \(\pmb {p}_2 = \mathrm {diag}(p_{21},p_{22},p_{23})>0\), \(r_{21} > 0\) and \(r_{22} > 0\) are user-defined positive definite parameters, \(\pmb {\omega }_2 = [\pmb {\eta }_{2}^T, \dot{\pmb {\eta }}_2^T]^T\) is the input vector of the fuzzy system, \(\pmb {\varepsilon }_2 = \pmb {\eta }_{2} - \pmb {\upsilon }_2\) is the observation error vector with
where \(r_{23} > 0\) is user-defined positive definite parameter.
3.3 Angular Velocity Controller
Let \(\pmb {\eta }_{3d}: =[p_d,q_d,r_d]^T= \pmb {u}_2\), together with angular velocity dynamics (6), we design a sliding surface as follows:
where \(\pmb {e}_3 = \pmb {\eta }_3 - \bar{\pmb {\eta }}_{3d}\), \(\pmb {k}_3 = \mathrm {diag}(k_{31},k_{32},k_{33})>0\) and \(\bar{\pmb {\eta }}_{3d}:=[{\bar{p}}_d,{\bar{q}}_d,{\bar{r}}_d]^T\) is the filtered output of \(\pmb {\eta }_{3d}\) given by
here, \(\epsilon _3 > 0 \) is an user-defined filtering time constant and let \(\pmb {y}_{3} = \bar{\pmb {\eta }}_{3d} - \pmb {\eta }_{3d}\).
Accordingly, an nominal angular velocity control law for sub-system (6) can be governed as follows:
with the FUO given by
Choosing the parameter matrix update rule as
where \(\pmb {p}_3 = \mathrm {diag}(p_{31},p_{32},p_{33})>0\), \(r_{31} > 0\) and \(r_{32} > 0\) are user-defined positive definite parameters, \(\pmb {\omega }_3 = [\pmb {\eta }_{3}^T, \dot{\pmb {\eta }}_3^T]^T\) is the input vector of the fuzzy system, \(\pmb {\varepsilon }_3 = \pmb {\eta }_{3} - \pmb {\upsilon }_3\) is the observation error vector with
where \(r_{33} > 0\) is user-defined positive definite parameter.
Then, the final control law is
4 Stability Analysis
Theorem 1
Consider an uncertain QUAV system (1)–(3)–(6), together with control scheme (11), (18), (24) with FUO given by (12), (19), (25), all system states and signals and all tracking errors are globally uniformly ultimately bounded.
Proof
Together with system (14), (21) and (27), we have
where \(i=1,2,3\).
Define the optimal parameter as
where \(M_{{\pmb {\vartheta } _{i}}}\) and \(M_{{\pmb {\omega } _{i}}}\) are bounded sets.
Then we have
where \(\pmb {\zeta }_i(\pmb {\omega }_i)\) is reconstruction error vector and \(\Vert \pmb {\zeta }_i(\pmb {\omega }_i)\Vert <{\bar{\zeta }}_i\), \({\bar{\zeta }}_i > 0\). Let \(\tilde{\pmb {\vartheta }}_{i}=\pmb {\vartheta }^*_{i}- \hat{\pmb {\vartheta }}_{i}\), together with system (29), we can obtain
Combining with system (12), (19), (25), (31), the following equation holds
then together with system (8), (17), (22) and (33), we can obtain
Choosing the following Lyapunov function
Together with system (32) and (34), the time derivative of (35) can be given as
together with systems (13), (20) and (26), we can obtain
where \(\pmb {s}_{12} = [s_{121}, s_{122}, s_{123}]^T\), \(\pmb {s}_{i} = [s_{i1}, s_{i2}, s_{i3}]^T\), \(\pmb {\varepsilon }_i = [\varepsilon _{i1}, \varepsilon _{i2}, \varepsilon _{i3}]^T\), \(\tilde{\pmb {\vartheta }}_i = [\tilde{\pmb {\vartheta }}_{i1}, \tilde{\pmb {\vartheta }}_{i2}, \tilde{\pmb {\vartheta }}_{i3}]\) and \(\dot{\hat{\pmb {\vartheta }}}_i = [\dot{\hat{\pmb {\vartheta }}}_{i1}, \dot{\hat{\pmb {\vartheta }}}_{i2}, \dot{\hat{\pmb {\vartheta }}}_{i3}]\) with \(i=1,2,3\).
Together with systems (9)–(10) and Assumption 1, we can obtain
where \(z_1\) is continuous bounded function. Then, we have
Similarly, there exists continuous bounded function \(z_2(\cdot )\) and \(z_3(\cdot )\), such that
In addition, using the Young’s inequality, we have
Substituting system (37), (39), (40) and (41) into system (36), it is easy to obtain
where \({\bar{z}}_i(t)\) is the upper bound value of \(z_i(t)\).
Selecting the following design parameters
with \(j=2,3\) and \(i=1,\ldots ,3\), we have
with
Together with the system (35) and (42), the following inequality holds
It is obvious that the function V(t) is bounded and together with system (35), we can find that the trajectory error \(\pmb {e}_{11}\) and the other error signals are uniformly ultimately bounded.
5 Simulation Studies
In this section, the effectiveness of the proposed control scheme for the QUAV is evaluated. The lumped uncertainties and/or external disturbances are given by \(\pmb {d}_i(t) = 3[\sin t, \cos t, \sin t]^T + 0.1\pmb {\eta }_i\), where \(\pmb {\eta }_1 = \pmb {\eta }_{11} + \pmb {\eta }_{12}\), \(i=1, 2, 3\).

States of x, y, z and \(\psi \).

Unknown nonlinearities.
The reference tracking trajectory is given as \([x_d, y_d, z_d, \psi _d] = [-2\sin t/2, 2\cos t/2, 2 \sin t + 3, \sin t]\) and the initial conditions of the QUAV are set as follows: \(x(0) = 2\), \(y(0) = -0.5\), \(z(0) = 2\), \(\phi (0) = 1\).
Figure 3 shows the tracking of three positions and the yaw, where FSMC denotes the proposed filtered sliding mode control scheme and SMC denotes the traditional sliding mode control scheme. From Fig. 3 we can find that both the proposed control scheme and the SMC scheme are able to robustly stabilize the QUAV and make it track the desired trajectory, while it is obvious that the proposed control scheme has faster response and higher accuracy. Figure 4 shows the estimate state of the FUO for the lumped unknown nonlinearities including system uncertainties and external disturbances on the trajectory, i.e., x, y, z and the yaw \(\psi \), from which we can see, although the unknown lumped nonlinearities continuous change along with the time, FUO can estimate the unknown nonlinearities well. In summary, we can conclude that the proposed tracking control approach can achieve remarkable performance in terms of tracking accuracy and disturbance rejection.
6 Conclusion
In this paper, a filtered sliding mode control scheme based on FUO for trajectory tracking of a QUAV has been proposed. To be specific, three cascaded sub-controllers are designed by incorporating underactuation constraints. First-order filters are employed to reconstruct sliding mode control signals together with their first derivatives, and thereby decoupling the iterative design within the QUAV tracking control scheme. Furthermore, FUOs have been designed to estimate the lumped unknown nonlinearities. By the Lyapunov approach, we have proven that all system states and signals and tracking errors are globally uniformly ultimately bounded. Simulation studies have demonstrated the effectiveness and superiority of the proposed tracking control scheme.
References
Cabecinhas, D., Naldi, R., Silvestre, C., Cunha, R., Marconi, L.: Robust landing and sliding maneuver hybrid controller for a quadrotor vehicle. IEEE Trans. Control Syst. Technol. 24(2), 400–412 (2016)
Driessens, S., Pounds, P.: The triangular quadrotor: a more efficient quadrotor configuration. IEEE Trans. Robot. Autom. 31(6), 1517–1526 (2015)
Elfeky, M., Elshafei, M.: Quadrotor with tiltable totors for manned applications. In: Proceedings of the 11th International Systems, Signals and Devices Multi-Conference, pp. 1–5 (2004)
Mohd, B., Mohd, A., Husain, A.R., Danapalasingam, K.A.: Nonlinear control of an autonomous quadrotor unmanned aerial vehicle using backstepping controller optimized by particle swarm optimization. J. Eng. Sci. Technol. Rev. 8(3), 39–45 (2015)
Jiang, J., Qi, J.T., Song, D.L., Han, J.D.: Control platform design and experiment of a quadrotor. In: Proceedings of the Chinese Control Conference, pp. 2974–2979 (2013)
Sadeghzadeh, I., Mehta, A., Chamseddine, A., Zhang, Y.M.: Active fault tolerant control of a quadrotor UAV based on gainscheduled PID control. In: Proceedings of the IEEE Canadian Conference on Electrical and Computer Engineering, pp. 1–4 (2012)
Ortiz, J.P., Minchala, L.I., Reinoso, M.J.: Nonlinear robust H-Infinity PID controller for the multivariable system quadrotor. IEEE Lat. Am. Trans. 14(3), 1176–1183 (2016)
Rashad, R., Aboudonia, A., Ayman, E.B.: Backstepping trajectory tracking control of a quadrotor with disturbance rejection. In: Proceedings of the XXV International Information, Communication and Automation Technologies (ICAT) Conference, pp. 1–7 (2015)
Zheng, F., Gao, W.N.: Adaptive integral backstepping control of a Micro-Quadrotor. In: Proceedings of the International Intelligent Control and Information Conferencce, pp. 910–915 (2011)
Runcharoon, K., Srichatrapimuk, V.: Sliding Mode Control of quadrotor. In: Proceedings of the International Conference on Technological Advances in Electrical, Electronics and Computer Engineering (TAEECE), pp. 552–557 (2013)
Besnard, L., Shtesscl, Y.B., Landrum, B.: Quadrotor vehicle control via sliding mode control driven by sliding mode disturbance observer. J. Franklin Inst. 349(2), 658–684 (2012)
Yacef, F., Bouhali, O., Hamerlain, M.: Adaptive fuzzy backstepping control for trajectory tracking of unmanned aerial quadrotor. In: Proceedings of the International Conference on Unmanned Aircraft Systems (ICUAS), pp. 920–927 (2014)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2017 Springer International Publishing AG
About this paper
Cite this paper
Wang, Y., Wang, N., Lv, S., Yin, J., Er, M.J. (2017). Fuzzy Uncertainty Observer Based Filtered Sliding Mode Trajectory Tracking Control of the Quadrotor. In: Cong, F., Leung, A., Wei, Q. (eds) Advances in Neural Networks - ISNN 2017. ISNN 2017. Lecture Notes in Computer Science(), vol 10262. Springer, Cham. https://doi.org/10.1007/978-3-319-59081-3_17
Download citation
DOI: https://doi.org/10.1007/978-3-319-59081-3_17
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-59080-6
Online ISBN: 978-3-319-59081-3
eBook Packages: Computer ScienceComputer Science (R0)