
Abstract
This paper investigates neutrosophic optimization (NSO) approach to optimize the cost of welding of a welded steel beam, while the maximum shear stress in the weld group, maximum bending stress in the beam, maximum deflection at the tip and buckling load of the beam have been considered as flexible constraints. The problem of designing an optimal welded beam consists of dimensioning a welded steel beam such as height, length, depth, width of welded beam, so as to minimize its cost, subject to the constraints as stated above. The purpose of the present study firstly is to investigate the effect of truth, indeterminacy and falsity membership function in NSO in perspective of welded beam design in imprecise environment and secondly is to analyze the results obtained by different optimization methods like fuzzy, intuitionistic fuzzy and several deterministic methods so that the welding cost of the welded steel beam become most cost-effective. Specifically based on truth, indeterminacy and falsity membership function, a single-objective NSO algorithm has been developed to optimize the welding cost, subjected to a set of flexible constraints. It has been shown that NSO is an efficient method in finding out the optimum value in comparison with other iterative methods for nonlinear welded beam design in precise and imprecise environment. Numerical example is also given to demonstrate the efficiency of the proposed NSO approach.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
In today’s highly competitive market, the pressure on a construction agency is to find better ways to attain the optimal solution. In conventional optimization problems, it is assumed that the decision maker is sure about the precise values of data involved in the model. But in real-world applications, all the parameters of the optimization problems may not be known precisely due to uncontrollable factors. Such type of imprecise data is well represented by fuzzy number introduced by Zadeh [1].
In reality, a decision maker may assume that an object belongs to a set to a certain degree, but it is probable that he is not sure about it. In other words, there may be uncertainty about the membership degree. The main premise is that the parameters’ demand across the problem is uncertain. So, they are known to fall within a prescribed uncertainty set with some attributed degree. In fuzzy set (FS) theory, there is no means to incorporate this hesitation in the membership degree. To incorporate the uncertainty in the membership degree, intuitionistic fuzzy set (IFS) proposed by Atanassov [2] is an extension of FS theory. In IFS theory along with degree of membership, a degree of non-membership is usually considered to express ill-known quantity. This degree of membership and non-membership functions are so defined as they are independent to each other, and sum of them is less or equal to one. Hence, IFS is playing an important role in decision making under uncertainty and has gained popularity in recent years. However, an application of the IFSs to optimization problems is introduced by Angelov [3]. His technique is based on maximizing the degree of membership and minimizing the degree of non-membership, and the crisp model is formulated using the IF aggregation operator.
Now the fact is that in IFS indeterminate information is partially lost, as hesitant information is taken in consideration by default. So indeterminate information should be considered in decision-making process. Smarandache [4] defined neutrosophic set that could handle indeterminate and inconsistent information. In neutrosophic sets, indeterminacy is quantified explicitly as indeterminacy membership along with truth membership and falsity membership functions which are independent. Wang et al. [5] define single-valued neutrosophic set which represents imprecise, incomplete, indeterminate, inconsistent information. Thus, taking the universe as a real line, we can develop the concept of single-valued neutrosophic set as special case of neutrosophic sets. This set is able to express ill-known quantity with uncertain numerical value in decision-making problem. It helps more adequately to represent situations where decision makers abstain from expressing their assessments.
In this way, neutrosophic set provides a richer tool to grasp impression and ambiguity than the conventional FS as well as IFSs. Although exactly known, partially unknown and uncertain information handled by fully utilizing the properties of transition rate matrices, together with the convexification of uncertain domains [6,7,8], NSO is more realistic in application of optimum design. These characteristics of neutrosophic set led to the extension of optimization methods in neutrosophic environment (NSE).
Besides, it has been seen that the current research on fuzzy mathematical programming is limited to the range of linear programming introduced by Ziemmermann [9]. It has been shown that the solutions of fuzzy linear programming problems (FLPPs) are always efficient. The most common approach for solving fuzzy linear programming problem is to change it into corresponding crisp linear programming problem.
But practically there exist so many nonlinear structural designs such as welded beam design problem in various fields of engineering. So development of nonlinear programming is also essential. Recently, a robust and reliable static output feedback (SOF) control for nonlinear systems [24] and for continuous-time nonlinear stochastic systems [25] with actuator fault in a descriptor system framework has been studied. However, welding can be defined as a process of joining metallic parts by heating to a suitable temperature with or without the application of pressure. This cost of welding should be economical, and welded beam should be durable one.
Since decades, deterministic optimization has been widely used in practice for optimizing welded connection design. These include mathematical traditional optimization algorithms such as David–Fletcher–Powell with a penalty function (DAVID) [10], Griffith and Stewart’s successive linear approximation (APPROX) [10], simplex method with penalty function (SIMPLEX) [10], Recherdson’s random method (RANDOM) [10], harmony search method [11], GA-based method [12, 13], improved harmony search algorithm [14], simple constrained particle swarm optimizer (SiC-PSO) [15], Mezura [16], constrained optimization via PSO algorithm (COPSO) [17], GA based on a coevolution model (GA1) [13], GA through the use of dominance-based tournament selection (GA2) [18], evolutionary programming with a cultural algorithm (EP) [19], coevolutionary particle swarm optimization (CPSO) [20], hybrid particle swarm optimization (HPSO) with a feasibility-based rule [21], hybrid Nelder–Mead simplex search method and particle swarm optimization (NM-PSO) [22], particle swarm optimization (PSO) [23], simulate anneling (SA) [23], Goldlike (GL) [23], cuckoo search (Cuckoo) [23], firefly algorithm (FF), flower pollination (FP) [23], ant lion optimizer (ALO) [23], gravitational search algorithm (GSA) [23], multi-verse optimizer (MVO) [23]. All these deterministic optimizations aim to search the optimum solution under given constraints without consideration of uncertainties.
So these traditional techniques cannot be applicable in optimizing welded beam design when impreciseness is involved in information. Thus, the research on optimization for nonlinear programming under fuzzy, IF and neutrosophic environment is not only necessary in the fuzzy optimization theory but also has great and wide value in application to welded beam design problem of conflicting and imprecise nature. This is the motivation of our present investigation.
In this regard, it can be cited that Das et al. [26] developed neutrosophic nonlinear programming with numerical example and application of real-life problem recently. A single-objective plane truss structure [27] and a multi-objective plane truss structure [28] have been optimized in IF environment. A multi-objective structural model has been optimized by IF mathematical programming with IF number for truss structure [29], welded beam structure [36] and neutrosophic number for truss design [35] as coefficient of objective by Sarkar et al. With the help of linear membership [30] and nonlinear membership [31, 32], single-objective truss design and multi-objective truss design [33] have been optimized in neutrosophic environment. A multi-objective goal programming technique [34], T-norm and T-conorm-based IF optimization technique [37] have been developed to optimize cost of welding in neutrosophic and IF environment, respectively.
The aim of this paper is to show the efficiency of single-objective NSO technique in finding optimum cost of welding of welded beam in imprecise environment and to make a comparison of results obtained from different deterministic methods.
The paper is organized as follows. In Sect. 2, we have presented mathematical preliminaries on neutrosophic set.
In Sect. 3, we have developed mathematical algorithm to solve a single-objective nonlinear programming problem. In Sect. 4, we have studied in detail formulation of welded beam by solving it using NSO technique. In Sect. 5, we have solved welded beam design model numerically. Lastly in Sect. 6, we arrive at a conclusion.
2 Mathematical Preliminaries
In the following, we briefly describe some basic concepts and basic operational laws related to neutrosophic set [1, 2, 5, 26].
2.1 Fuzzy Set (FS) [1]
Let X be a fixed set. A fuzzy set \(\tilde{A}\) of X is an object having the form
where the function \(T_{{\tilde{A}}} :X \to \left[ {0,1} \right]\) stands for the truth membership of the element to the set \(\tilde{A}\).
2.2 Intuitionistic Fuzzy Set (IFS) [2]
Let a set X be fixed. An intuitionistic fuzzy set or IFS \(\tilde{A}^{i}\) in X is an object of the form
where \(T_{{\tilde{A}^{i} }} :X \to \left[ {0,1} \right]\) and \(F_{{\tilde{A}^{i} }} :X \to \left[ {0,1} \right]\) define the truth membership and falsity membership, respectively, for every element of \(x \in X\) such that \(0 \le T_{{\tilde{A}^{i} }} \left( x \right) + F_{{\tilde{A}^{i} }} \left( x \right) \le 1\).
2.3 Single-Valued Neutrosophic Set (SVNS) [5]
Let a set X be the universe of discourse. A single-valued neutrosophic set \(\tilde{A}^{n}\) over X is an object having the form
where \(T_{{\tilde{A}^{n} }} :X \to \left[ {0,1} \right],\;\,I_{{\tilde{A}^{n} }} :X \to \left[ {0,1} \right]\) and \(F_{{\tilde{A}^{n} }} :X \to \left[ {0,1} \right]\) are truth indeterminacy and falsity membership functions, respectively, so as to \(0 \le T_{{\tilde{A}^{n} }} \left( x \right) + I_{{\tilde{A}^{n} }} \left( x \right) + F_{{\tilde{A}^{n} }} \left( x \right) \le 3\) for all \(x \in X\).
2.4 Union of Neutrosophic Sets (NSs) [26]
The union of two single-valued neutrosophic sets \(\tilde{A}^{n}\) and \(\tilde{B}^{n}\) is a single-valued neutrosophic set \(\tilde{U}^{n}\) denoted by
and is defined by the following conditions
(i) \(T_{{\tilde{U}^{n} }} \left( x \right) = \hbox{max} \left( {T_{{\tilde{A}^{n} }} \left( x \right),T_{{\tilde{B}^{n} }} \left( x \right)} \right),\)
(ii) \(I_{{\tilde{U}^{n} }} \left( x \right) = \hbox{max} \left( {I_{{\tilde{A}^{n} }} \left( x \right),I_{{\tilde{B}^{n} }} \left( x \right)} \right),\)
(iii) \(F_{{\tilde{U}^{n} }} \left( x \right) = \hbox{min} \left( {F_{{\tilde{A}^{n} }} \left( x \right),F_{{\tilde{B}^{n} }} \left( x \right)} \right)\) for all \(x \in X\) for Type-I
Or in another way by defining following conditions
(i) \(T_{{\tilde{U}^{n} }} \left( x \right) = \hbox{max} \left( {T_{{\tilde{A}^{n} }} \left( x \right),T_{{\tilde{B}^{n} }} \left( x \right)} \right),\)
(ii) \(I_{{\tilde{U}^{n} }} \left( x \right) = \hbox{min} \left( {I_{{\tilde{A}^{n} }} \left( x \right),I_{{\tilde{B}^{n} }} \left( x \right)} \right)\)
(iii) \(F_{{\tilde{U}^{n} }} \left( x \right) = \hbox{min} \left( {F_{{\tilde{A}^{n} }} \left( x \right),F_{{\tilde{B}^{n} }} \left( x \right)} \right)\) for all \(x \in X\) for Type-II, where \(T_{{\tilde{U}^{n} }} \left( x \right),\;I_{{\tilde{U}^{n} }} \left( x \right),\;I_{{\tilde{U}^{n} }} \left( x \right),\;F_{{\tilde{U}^{n} }} \left( x \right)\) represent truth membership, indeterminacy membership and falsity membership functions of union of neutrosophic sets.
Example
Let \(\tilde{A}^{n} = <0.3,0.4,0.5{>}{/}x_{1} + <0.5,0.2,0.3{>}{/}x_{2} + <0.7,0.2,0.2{>}{/}x_{3}\) and \(\tilde{B}^{n} = <0.6,0.1,0.2{>}{/}x_{1} + <0.3,0.2,0.6{>}{/}x_{2} + <0.4,0.1,0.5{>}{/}x_{3}\) be two neutrosophic sets. Then, the union of \(\tilde{A}^{n}\) and \(\tilde{B}^{n}\) is a single-valued neutrosophic set that can be calculated for Type-I as
and for Type-II as
2.5 Intersection of Neutrosophic Sets [26]
The intersection of two single-valued neutrosophic sets \(\tilde{A}^{n}\) and \(\tilde{B}^{n}\) is a single-valued neutrosophic set \(\tilde{E}^{n}\) that is denoted by
and is defined by the following conditions
(i) \(T_{{\tilde{E}^{n} }} \left( x \right) = \hbox{min} \left( {T_{{\tilde{A}^{n} }} \left( x \right),T_{{\tilde{B}^{n} }} \left( x \right)} \right),\)
(ii) \(I_{{\tilde{E}^{n} }} \left( x \right) = \hbox{min} \left( {I_{{\tilde{A}^{n} }} \left( x \right),I_{{\tilde{B}^{n} }} \left( x \right)} \right),\)
(iii) \(F_{{\tilde{E}^{n} }} \left( x \right) = \hbox{max} \left( {F_{{\tilde{A}^{n} }} \left( x \right),F_{{\tilde{B}^{n} }} \left( x \right)} \right)\) for all \(x \in X\) for Type-I
Or in another way by defining following conditions
(i) \(T_{{\tilde{E}^{n} }} \left( x \right) = \hbox{min} \left( {T_{{\tilde{A}^{n} }} \left( x \right),T_{{\tilde{B}^{n} }} \left( x \right)} \right),\)
(ii) \(I_{{\tilde{E}^{n} }} \left( x \right) = \hbox{max} \left( {I_{{\tilde{A}^{n} }} \left( x \right),I_{{\tilde{B}^{n} }} \left( x \right)} \right)\)
(iii) \(F_{{\tilde{E}^{n} }} \left( x \right) = \hbox{max} \left( {F_{{\tilde{A}^{n} }} \left( x \right),F_{{\tilde{B}^{n} }} \left( x \right)} \right)\) for all \(x \in X\) for Type-II, where \(T_{{\tilde{E}^{n} }} \left( x \right),\) \(I_{{\tilde{E}^{n} }} \left( x \right),\) \(F_{{\tilde{E}^{n} }} \left( x \right)\) represent truth membership, indeterminacy membership and falsity membership functions of union of neutrosophic sets.
Example
Let \(\tilde{A}^{n} = < 0.3,0.4,0.5 {>}{/}x_{1} + < 0.5,0.2,0.3 {>}{/}x_{2} + < 0.7,0.2,0.2 {>}{/}x_{3}\) and \(\tilde{B}^{n} = < 0.6,0.1,0.2 {>}{/}x_{1} + < 0.3,0.2,0.6 {>}{/}x_{2} + < 0.4,0.1,0.5 {>}{/}x_{3}\) be two neutrosophic sets. Then, the intersection of \(\tilde{A}^{n} and \,\tilde{B}^{n}\) is a single-valued neutrosophic set that can be measured for Type-I as
and for Type-II as
3 Mathematical Analysis
Decision making is nothing but a process of solving the problem that achieves goals under constraints. The outcome of the problem is a decision which should in an action. Decision making plays an important role in different subjects such as field of economic and business, management sciences, engineering and manufacturing, social and political science, biology and medicine, military, computer science. It faces difficulty in progress due to factors like incomplete and imprecise information which is often present in real-life situations. In the decision-making process, the decision maker’s main target is to find the value from the selected set with the highest degree of membership in the decision set and these values support the goals under constraints only. But while vegueness exists in available information there may arise situations where some values from selected set cannot support, rather such values strongly against the goals under constraints which are non-admissible. In this case, we find such values from the selected set with least degree of non-membership in the decision sets. IFSs can only handle incomplete information not the indeterminate information and inconsistent information which exists commonly belief in system. In neutrosophic set, indeterminacy is quantified explicitly and truth membership, indeterminacy membership and falsity membership are independent to each other. So it is natural to adopt for that purpose the value from the selected set with highest degree of truth membership, highest degree or least degree of indeterminacy membership and least degree of falsity membership on the decision set. These factors indicate that a decision-making process takes place in neutrosophic environment.
3.1 Neutrosophic Optimization (NSO) Technique to Solve Single-Objective Nonlinear Programming Problem (SONLPP)
A nonlinear programming problem (NLPP) may be considered in the following form
subject to,
Usually constraint goals are considered as fixed quantity. But in real-life problems, the constraint goals cannot be always exact. So we can consider the constraint goals for minimization type non-linear programming problem at least \(b_{j}\), and it may be possible to extend to \(b_{j} + b_{j}^{0}\) for \(j = 1,2, \ldots ,m\). This fact seems to take the constraint goals as a neutrosophic set, and it will be more realistic descriptions than others. Then, NSO problem with neutrosophic goals can be described as follows:
subject to,
In the case of degree of falsity membership and indeterminacy membership, it is to define simultaneously with degree of truth membership of the objective and constraint and while all these three degrees are independent of each other, NSO can be used as a more general tool to describe this uncertainty. Considering maximization of the degree of truth membership together with minimization or maximization of the degree of indeterminacy as per decision maker’s choice and minimizing degree of falsity membership of neutrosophic fuzzy objective and constraints, we can formulate a NSO technique to solve a neutrosophic nonlinear programming (NSNLP) (Eqs. 13–15) problem.
To solve the NSNLP (Eqs. 13–15), following Warner’s [38] and Angelov [3] we are presenting a solution procedure by successive steps as follows:
Step-1 Following Warner’s approach, solve the SONLPP without tolerance in constraints, with tolerance of truth membership in constraints (i.e., \(g_{j} \left( x \right) \le b_{j} + b_{j}^{0}\)) by appropriate nonlinear programming technique. Here they are,
Subproblem 1
subject to,
Subproblem 2
subject to,
we may get optimal solutions \(x^{*} = x^{1} ,g\left( {x^{*} } \right) = g\left( {x^{1} } \right)\) and \(x^{*} = x^{2} ,g\left( {x^{*} } \right) = g\left( {x^{2} } \right)\) for subproblems 1 and 2, respectively.
Step-2 From the result of step 1, we now find the lower bound and upper bound of objective functions. Let \(U_{g\left( x \right)}^{T} ,U_{g\left( x \right)}^{I} ,U_{g\left( x \right)}^{F}\) be the upper bounds of truth, indeterminacy, falsity membership function for the objective, respectively, and \(L_{g\left( x \right)}^{T} ,L_{g\left( x \right)}^{I} ,L_{g\left( x \right)}^{F}\) be the lower bound of truth, indeterminacy, falsity membership functions of objective, respectively, using following rules
But in single-valued NSO technique, the degree of truth, indeterminacy and falsity membership are considered so that the sum of these degree of membership values is less than three. To define the falsity and indeterminacy membership function of NLP (Eqs. 10–12), let us consider \(U_{g\left( x \right)}^{F} ,\;L_{g\left( x \right)}^{F}\) and \(U_{g\left( x \right)}^{I} ,\;L_{g\left( x \right)}^{I}\) be the upper and lower bounds of objective function \(g\left( x \right)\) such that
The initial neutrosophic model (Model-I) with aspiration levels of objectives can be formulated as
So as to satisfy
for \(j = 1,2, \ldots m,\;\varepsilon_{{g_{j} \left( x \right)}} = t\left( {U_{{g_{j} \left( x \right)}}^{T} - L_{{g_{j} \left( x \right)}}^{T} } \right);t \in \left( {0,1} \right)\) and \(\xi_{{g_{j} \left( x \right)}} = s\left( {U_{{g_{j} \left( x \right)}}^{T} - L_{{g_{j} \left( x \right)}}^{T} } \right);s \in \left( {0,1} \right)\) and for Mode-II, it can be formulated as
So as to satisfy
for \(j = 1,2, \ldots m,\;\varepsilon_{{g_{j} \left( x \right)}} = t\left( {U_{{g_{j} \left( x \right)}}^{T} - L_{{g_{j} \left( x \right)}}^{T} } \right);t \in \left( {0,1} \right)\) and \(\xi_{{g_{j} \left( x \right)}} = s\left( {U_{{g_{j} \left( x \right)}}^{T} - L_{{g_{j} \left( x \right)}}^{T} } \right);s \in \left( {0,1} \right)\)
Here ‘\(\ge^{n}\)’ denotes inequality in neutrosophic sense.
Step-3 Here for simplicity linear membership \(T_{g\left( x \right)}\) for truth, \(I_{g\left( x \right)}\) for indeterminacy and \(F_{g\left( x \right)}\) for falsity membership functions of objective function are defined as follows:
Step-4 Using linear membership function \(T_{{g_{j} \left( x \right)}}\) for truth, \(I_{{g_{j} \left( x \right)}}\) for indeterminacy and \(F_{{g_{j} \left( x \right)}}\) for falsity membership functions, we can calculate the membership functions of constraints as follows:
for \(j = 1,2, \ldots m\,\,\,\,0 < \varepsilon_{{g_{j} \left( x \right)}} ,\xi_{{g_{j} \left( x \right)}} < b_{j}^{0}\). and
Step-5 Now using NSO [30] for single-objective optimization with linear truth, indeterminacy and falsity membership functions, the NSNLP (Eqs. 13–15) can be formulated as
Model-I
Such that
Model-II
subject to the same constraints as Model-I.
All these crisp nonlinear programming problems (Model-I) and (Model-II) can be solved by appropriate mathematical algorithm.
4 Welded Beam Design (WBD) and its Optimization in Neutrosophic Environment
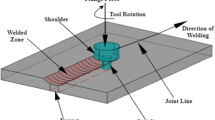
Welding, a process of joining metallic parts with the application of heat or pressure or the both, with or without added material, is an economical and efficient method for obtaining permanent joints in the metallic parts. These welded joints are generally used as a substitute for riveted joint or can be used as an alternative method for casting or forging. The welding processes can broadly be classified into following two groups: the welding process that uses heat alone to join two metallic parts and the welding process that uses a combination of heat and pressure for joining (Bhandari. V. B). However, above all the design of welded beam should preferably be economical and durable one.
4.1 WBD Formulation
The optimum welded beam design ([37], Fig. 1) can be formulated considering some design criteria such as cost of welding, i.e., cost function, shear stress, bending stress and deflection, derived as follows:

Shear stresses in the weld group
4.1.1 Cost Function Formulation
The performance index appropriate to this design is the cost of weld assembly. The major cost components of such an assembly are (i) setup labor cost, (ii) welding labor cost, (iii) material cost, i.e.,
where \(C\left( X \right) =\) cost function; \(C_{0} =\) setup cost; \(C_{1} =\) welding labor cost; \(C_{2} =\) material cost. Now
Setup cost \(C_{0}\) The company has chosen to make this component a weldment, because of the existence of a welding assembly line. Furthermore, assume that fixtures for setup and holding of the bar during welding are readily available. The cost \(C_{0}\) can therefore be ignored in this particular total cost model.
Welding labor cost \(C_{1}\) Assume that the welding will be done by machine at a total cost of $10/h (including operating and maintenance expense). Furthermore, suppose that the machine can lay down a cubic inch of weld in 6 min. The labor cost is then
where V w = weld volume, in3
where C 3 = cost per volume per weld material, \(\$ /{\text{in}}^{3} = (0.37)(0.283);\) C 4 = cost per volume of bar stock, \(\$ /{\text{in}}^{3} = (0.37)(0.283)\); V B = volume of bar, in3.
From geometry \(V_{w} = h^{2} l\); volume of the weld material, in3; \(V_{\text{weld}} = x_{1}^{2} x_{2}\) and \(V_{B} = tb\left( {L + l} \right)\); volume of bar, in3; \(V_{\text{bar}} = x_{3} x_{4} \left( {L + x_{2} } \right)\).
Therefore, cost function become
4.1.2 Constraints Derivation from Engineering Relationship
Figure 1.
4.1.3 Maximum Shear Stress in Weld Group
To complete the model, it is necessary to define important stress states
Direct or primary shear stress, i.e.,
Since the shear stress produced due to turning moment \(M = P \cdot e\) at any section is proportional to its radial distance from center of gravity of the joint ‘G’, stress due to \(M\) is proportional to \(R\) and is in a direction at right angles to \(R\). In other words,
where \(\tau_{2}\) is the shear stress at the maximum distance R and \(\tau\) is the shear stress at any distance r. Consider a small section of the weld having area dA at a distance r from ‘G.’ Therefore, shear force on this small section is \(= \tau \times dA\) and turning moment of the shear force about center of gravity is
Therefore, total turning moment over the whole weld area is
where J = polar moment of inertia of the weld group about center of gravity.
Therefore, shear stress due to the turning moment is
In order to find the resultant stress, the primary and secondary shear stresses are combined vectorially. Therefore, the maximum resultant shear stress that will be produced at the weld group is
where θ = angle between \(\tau_{1}\) and \(\tau_{2}\).
Now the polar moment of inertia of the throat area \(\left( A \right)\) about the center of gravity is obtained by parallel axis theorem,
where A = throat area = \(\sqrt 2 x_{1} x_{2}\), l = length of the weld,
4.1.4 Maximum Bending Stress in Beam
Now maximum bending moment = PL, maximum bending stress = \(\frac{T}{Z}\), where T = PL; Z = section modulus = \(\frac{I}{y};\) \(I =\) moment of inertia \(= \frac{{bt^{3} }}{12};\) \(y =\) distance of extreme fiber from center of gravity of cross section = \(\frac{t}{2};\) therefore, \(Z = \frac{{bt^{2} }}{6}\).
4.1.5 Maximum Deflection in Beam
4.1.6 Buckling Load of Beam
where I = moment of inertia \(= \frac{{bt^{3} }}{12};\) torsional rigidity \(C = GJ = \frac{1}{3}tb^{3} G;\) \(l = L;a = \frac{t}{2}.\)
4.2 Crisp Formulation of WBD
In design formulation, a welded beam ([10], Fig. 2) has to be designed at minimum cost whose constraints are shear stress in weld \(\left( \tau \right)\), bending stress in the beam \(\left( \sigma \right)\), buckling load on the bar (P) and deflection of the beam \(\left( \delta \right)\). The design variables are \(\left[ {\begin{array}{*{20}c} {x_{1} } \\ {x_{2} } \\ {x_{3} } \\ {x_{4} } \\ \end{array} } \right] = \left[ {\begin{array}{*{20}c} h \\ l \\ t \\ b \\ \end{array} } \right]\) where h is the weld size, l is the length of the weld, t is the depth of the welded beam, and b is the width of the welded beam.

Design of the welded beam
The single-objective crisp welded beam optimization problem can be formulated as follows:
such that
where \(\tau \left( x \right) = \sqrt {\tau_{1}^{2} + 2\tau_{1} \tau_{2} \frac{{x_{2} }}{2R} + \tau_{2}^{2} }\); \(\tau_{1}\,=\,\frac{P}{{\sqrt 2 x_{1} x_{2} }}\); \(\tau_{2}\,=\,\frac{MR}{J}\); \(M\,=\,P\left( {L + \frac{{x_{2} }}{2}} \right)\); \(R\,=\,\sqrt {\frac{{x_{2}^{2} }}{4} + \left( {\frac{{x_{1} + x_{3} }}{2}} \right)^{2} }\); \(J\,=\, \left\{ {\frac{{x_{1} x_{2} }}{\sqrt 2 }\left[ {\frac{{x_{2}^{2} }}{12} + \left( {\frac{{x_{1} + x_{3} }}{2}} \right)^{2} } \right]} \right\};\) \(\sigma \left( x \right)\, =\, \frac{6PL}{{x_{4} x_{3}^{2} }};\) \(\delta \left( x \right)\, = \,\frac{{4PL^{3} }}{{Ex_{4} x_{3}^{2} }};\) \(P_{C} \left( x \right)\,= \,\frac{{4.013\sqrt {EGx_{3}^{6} x_{4}^{6} /36} }}{{L^{2} }}\left( {1 - \frac{{x_{3} }}{2L}\sqrt {\frac{E}{4G}} } \right)\) as derived as Eqs. (70), (64), (69), (68), (66), (73), (75), (76), (78), respectively. Again \(P\,=\,\) Force on beam; \(L\,=\,\) Beam length beyond weld; \(x_{1}\,=\,\) Height of the welded beam; \(x_{2}\,=\,\) Length of the welded beam; \(x_{3}\,=\,\) Depth of the welded beam; \(x_{4}\,=\,\) Width of the welded beam; \(\tau \left( x \right)\,=\,\) Design shear stress; \(\sigma \left( x \right)\,=\,\) Design normal stress for beam material; M = Moment of P about the center of gravity of the weld, J = Polar moment of inertia of weld group; G = Shearing modulus of Beam Material; E = Young modulus; \(\tau_{\hbox{max} }\,=\,\) Design Stress of the weld; \(\sigma_{\hbox{max} }\,=\,\) Design normal stress for the beam material; \(\delta_{\hbox{max} }\,=\,\) Maximum deflection; \(\tau_{1}\,=\,\) Primary stress on weld throat; \(\tau_{2}\,=\,\) Secondary torsional stress on weld.
4.3 WBD Formulation in Neutrosophic Environment
Sometimes slight change in stress or deflection enhances the weight of structures and indirectly cost of processing. In such situation when decision maker (DM) is in doubt to decide the stress constraint goal, the DM can induce the idea of acceptance boundary, hesitancy response or negative response margin of constraints goal. This fact seems to take the constraint goal as a NS instead of FS and IFS. It may be more realistic description than FS and IFS. When the sheer stress, normal stress and deflection constraint goals are NS in nature, the above crisp welded beam design (Eqs. 79–87) can be formulated as
Such that
where all the parameters have their usual meaning as stated in Sect. 4.2. Here constraint goals are characterized by neutrosophic sets
with \(T_{{\tilde{\tau }_{\hbox{max} }^{n} }} \left( {\tau_{\hbox{max} } \left( {x_{1} ,x_{2} } \right)} \right),\) \(I_{{\tilde{\tau }_{\hbox{max} }^{n} }} \left( {\tau_{\hbox{max} } \left( {x_{1} ,x_{2} } \right)} \right),\) \(F_{{\tilde{\tau }_{\hbox{max} }^{n} }} \left( {\tau_{\hbox{max} } \left( {x_{1} ,x_{2} } \right)} \right)\) as the degree of truth, indeterminacy and falsity membership functions of neutrosophic set \(\tilde{\tau }_{\hbox{max} }^{n}\);
with \(T_{{\tilde{\sigma }_{\hbox{max} }^{n} }} \left( {\sigma_{\hbox{max} } \left( {x_{3} ,x_{4} } \right)} \right),\) \(I_{{\tilde{\sigma }_{\hbox{max} }^{n} }} \left( {\sigma_{\hbox{max} } \left( {x_{3} ,x_{4} } \right)} \right),\) \(F_{{\tilde{\sigma }_{\hbox{max} }^{n} }} \left( {\sigma_{\hbox{max} } \left( {x_{3} ,x_{4} } \right)} \right)\) as the degree of truth, indeterminacy and falsity membership functions of neutrosophic set \(\tilde{\sigma }_{\hbox{max} }^{n}\); and
with \(T_{{\tilde{\delta }_{\hbox{max} }^{n} }} \left( {\delta_{\hbox{max} } \left( {x_{3} ,x_{4} } \right)} \right),\) \(I_{{\tilde{\delta }_{\hbox{max} }^{n} }} \left( {\delta_{\hbox{max} } \left( {x_{3} ,x_{4} } \right)} \right),\) \(F_{{\tilde{\delta }_{\hbox{max} }^{n} }} \left( {\delta_{\hbox{max} } \left( {x_{3} ,x_{4} } \right)} \right)\) as the degree of truth, indeterminacy and falsity membership functions of neutrosophic set \(\tilde{\delta }_{\hbox{max} }^{n}\)
4.4 Optimization of WBD in Neutrosophic Environment
To solve the WBD (Eqs. 88–96), step 1 of Sect. 3.1 is used and we will get optimum solutions of two subproblem as \(X^{1}\) and \(X^{2}\). After that according to step 2, we find upper and lower bounds of membership function of objective function as \(U_{C\left( X \right)}^{T} ,U_{C\left( X \right)}^{I} ,U_{C\left( X \right)}^{F}\) and \(L_{C\left( X \right)}^{T} ,L_{C\left( X \right)}^{I} ,L_{C\left( X \right)}^{F}\) where \(U_{C\left( X \right)}^{T} = \hbox{max} \left\{ {C\left( {X^{1} } \right),C\left( {X^{2} } \right)} \right\},\;L_{C\left( X \right)}^{T} = \hbox{min} \left\{ {C\left( {X^{1} } \right),C\left( {X^{2} } \right)} \right\},\)
therefore,
Let the linear membership functions for objective be,
and constraints be,
for \(j = 1,2, \ldots ,m\,\,\,\,0 < \varepsilon_{{\sigma_{i} \left( X \right)}} ,\xi_{{\sigma_{i} \left( X \right)}} < \sigma_{i}^{0}\) then NSO problem (Eqs. 88–96) can be formulated as the following crisp linear programming problem by considering linear membership as follows:
Type-I
Such that
Model-II
Subject to the same constraints as Model-I (Eqs. 108–115). All these crisp nonlinear programming problems can be solved by appropriate mathematical algorithm.
5 Numerical Illustration
Input data of welded beam design problem (Eqs. 79–87) are given in Table 1 as follows:
Solution: According to step 2 of Sect. 3.1, we find upper and lower bound of membership function of objective function as \(U_{C\left( X \right)}^{T} ,U_{C\left( X \right)}^{I} ,U_{C\left( X \right)}^{F}\) and \(L_{C\left( X \right)}^{T} ,L_{C\left( X \right)}^{I} ,L_{C\left( X \right)}^{F}\) where \(U_{C\left( X \right)}^{T} = 1.861642 = U_{C\left( X \right)}^{F} ,L_{C\left( X \right)}^{T} = 1.858613 = L_{C\left( X \right)}^{I} ,\) \(L_{C\left( X \right)}^{F} = 1.858613 + \varepsilon_{C\left( X \right)}\), with \(0 < \varepsilon_{C\left( X \right)} < .003029;\) and \(U_{C\left( X \right)}^{I} = L_{C\left( X \right)}^{T} + \xi_{C\left( X \right)}\) with \(0 < \xi_{C\left( X \right)} < .003029\)
Now using the bounds, we calculate the membership functions for objective as follows:
similarly the membership functions for shear stress constraint are,
and the membership functions for normal stress constraint are,
and the membership functions for deflection constraint are,
Now, using above-mentioned truth, indeterminacy and falsity linear membership function NLP (Eqs. 79–87) can be solved for Model-I and Model-II, by fuzzy, intuitionistic fuzzy and NSO technique with different values of \(\varepsilon_{C\left( X \right)} ,\varepsilon_{{g_{1} \left( x \right)}} ,\varepsilon_{{g_{2} \left( x \right)}} ,\varepsilon_{{g_{6} \left( x \right)}}\) and \(\xi_{C\left( X \right)} ,\xi_{{g_{1} \left( x \right)}} ,\xi_{{g_{2} \left( x \right)}} ,\xi_{{g_{6} \left( x \right)}}\). The optimum height, length, depth, width and cost of welding of welded beam design (Eqs. 79–87) are given in Table 2, and the solution are compared with other deterministic optimization methods.
A detailed comparison has been made among several deterministic optimization methods for optimizing welding cost with imprecise optimization methods such as fuzzy, IF and NSO methods in Table 2. It has been observed that fuzzy nonlinear optimization provides better result in comparison with IF and NSO methods. Although it has been seen that in this method cost of welding is minimum than in other the methods studied in this paper, as far as non-deterministic optimization methods concern, fuzzy, IF and NSO are providing a valuable result in imprecise environment in this paper and the literature. It has been seen that improved harmony search algorithm [14], COPSO [17], EP [19], HPSO [21] are providing minimum most cost of welding where all the parameters have been considered as exact in nature. However, it may also be noted that the efficiency of the proposed method depends on the model chosen to a greater extent because it is not always expected that NSO will provide better results over fuzzy and IF optimization. So overall NSO is an efficient method in finding best optimal solution in imprecise environment. It has been studied that same results have been obtained while indeterminate membership tried to be maximize (Model-I) or minimize (Model-II) in NSO for this particular problem.
6 Conclusion
In this paper, a single-objective NSO algorithm has been developed by defining truth, indeterminacy and falsity membership functions which are independent to each other. Using this method, firstly optimum height length depth, width and cost of welding have been calculated and finally the results are compared with different deterministic methods. So given example of welded beam design illustrates the optimization procedure, effectiveness and advantages of the proposed NSO method. The comparison of NSO technique with other optimization techniques has enhanced the acceptability of proposed method. The result obtained in proposed neutrosophic optimization method is not absurd related to other deterministic methods and the results have been obtained in imprecise environment, so realistic.
References
Zadeh, L.A.: Fuzzy set. Inf. Control 8, 338–353 (1965)
Atanassov, K.T.: Intuitionistic fuzzy sets. Fuzzy Sets Syst. 20, 87–96 (1986)
Angelov, P.P.: Optimization in intuitionistic fuzzy environment. Fuzzy Sets Syst. 86, 299–306 (1997)
Smarandache, F.:Neutrosophic logic and set,mss. http://fs.gallup.unm.edu/neutrosophy.htm (1995). Accessed 8 Mar 2017
Wang, H., Smarandache, F., Zhang, Y.Q., Raman, R.: Single valued neutrosophic sets. Multispace Multistruct. 4, 410–413 (2010)
Wei, Y., Qiu, J., Karimi, H.R., Wang, M.: H∞ ← model reduction for continuous-time Markovian jump systems with incomplete statistics of mode information. Int. J. Syst. Sci. 45, 1496–1507 (2014)
Wei, Y., Qiu, J., Karimi, H.R., Wang, M.: New results on H1 dynamic output feedback control for Markovian jump systems with time-varying delay and defective mode information. Optim. Control Appl. Methods 35, 656–675 (2014)
Wei, Y., Qiu, J., Karimi, H.R., Wang, M.: Filtering design for two-dimensional Markovian jump systems with state-delays and deficient mode information’’. Inf. Sci. 269, 316–331 (2014)
Zimmermann, H.J.: Fuzzy linear programming with several objective function. Fuzzy Sets Syst. 1, 45–55 (1978)
Ragsdell, K.M., Phillips, D.T.: Optimal design of a class of welded structures using geometric programming. ASME J. Eng. Ind. 98, 1021–1025 (1976)
Lee, K.S., Geem, Z.W.: A new meta-heuristic algorithm for continuous engineering optimization: harmony search theory and practice. Comput. Methods Appl. Mech. Eng. 194, 3902–3933 (2005)
Deb, K., Pratap, A., Moitra, S.: Mechanical component design for multiple objectives using elitist non-dominated sorting GA. In: Proceedings of the Parallel Problem Solving from Nature VI Conference, Paris, Vol 16–20, pp. 859–868 (2000). -->
Coello, C.A.C.: Use of a self-adaptive penalty approach for engineering optimization problems. Comput. Ind. 41, 113–127 (2000). doi:10.1016/S0166-3615(99)00046-9
Mahdavi, M., Fesanghary, M., Damangir, E.: An improved harmony search algorithm for solving optimization problems. Appl. Math. Comput. 188, 1567–1579 (2007)
Coello Coello, C.A.: Solving engineering optimization problems with the simple constrained particle swarm optimizer. Informatica 32, 319–326 (2008)
Coello, C.A.C., Montes, E.M.: Useful infeasible solutions in engineering optimization with evolutionary algorithms. In: Mexican International Conference on Artificial Intelligence. (2005). DOI: 10.1007/11579427_66
Aguirre, A.H., Zavala, A.M., Diharce, E.V., Rionda, S.B.: COPSO: Constrained Optimization via PSO Algorithm. Centre for Research in Mathematics (CIMAT). Technical report No.I-07-04/22-02-2007, (2007)
Coello Coello, C.A., Montes, M.: Contraint-handling techniques in genetic algorithms through dominance based tournament selection. Adv. Eng. Inform. 16, 193–203 (2002)
Coello Coello, C.A., Becerra, R.L.: Efficient evolutionary optimization through the use of a cultural algorithm. Eng. Optim. 36, 219–236 (2004)
He, Q., Wang, L.: An effective co-evolutionary particle swarm optimization for constrained engineering design problems. Eng. Appl. Artif. Intell. 20, 89–99 (2007)
He, Q., Wang, L.: Ahybrid particle swarm optimization with a feasibility based rule for constrained optimization. Appl. Math. Comput. 186, 1407–1422 (2007)
Zahara, E., Kao, Y.T.: Hybrid Nelder-mead simplex search and particle swarm optimization for constrained engineering design problems. Expert Syst. Appl. 36, 3880–3886 (2009)
David, D.C.N., Stephen, S.E.A., Ajoy, J.A.: Cost minimization of welded beam design problem using PSO, SA, PS, GOLDLIKE, CUCKOO, FF, FP, ALO, GSA and MVO. Int. J. Appl. Math. 5, 1–14 (2016)
Wei, Y., Qiu, J., Karimi, H.R.: Reliable output feedback control of discrete-time fuzzy affine systems with actuator faults. pp. 1–12 (2016). Doi: 10.1109/TCSI.2016.2605685
Wei, Y., Qiu, J., Lam, H.K., Wu, L.: Approaches to T-S Fuzzy-affine-model-based reliable output feedback control for nonlinear itˆo stochastic systems. IEE Trans. Fuzzy Syst. (2016). doi:10.1109/TFUZZ.2016.2566810
Das, P., Roy, T.K.: Multi-objective non-linear programming problem based on neutrosophic optimization technique and its application in Riser Design Problem. Neutrosophic Sets Syst. 9, 88–95 (2015)
Singh, B., Sarkar, M., Roy, T.K.: Intuitionistic fuzzy optimization of truss design: a comperative study. Int. J. Comput. Organ. Trends (IJCOT) 3, 25–33 (2016)
Sarkar, M., Roy, T.K.: Intuitionistic fuzzy optimization on structural design:a comparative study. Int. J. Innov. Res. Sci. Eng. Technol. 5, 18471–18482 (2016)
Sarkar, M., Roy, T.K.: Truss design optimization with imprecise load and stress in intuitionistic fuzzy environment. J. Ultra Sci. Phys. Sci. 29, 12–23 (2017)
Sarkar, M., Dey, S., Roy, T.K.: Truss Design optimization using neutrosophic optimization technique. Neutrosphic Sets Syst. 13, 62–69 (2016)
Sarkar, M., Roy, T.K.: Truss design optimization using neutrosophic optimization technique: a comparative study. Adv. Fuzzy Math. 12, 411–438 (2017)
Sarkar, M., Dey, S., Roy, T.K.: Neutrosophic optimization technique and its application on structural design. J. Ultra Sci. Phys. Sci. 28, 309–321 (2016)
Sarkar, M., Dey, S., Roy, T.K.: Multi-objective neutrosophic optimization technique and its application to structural design. Int. J. Comput. Appl. 148, 31–37 (2016)
Sarkar, M., Roy, T.K.: Multi-objective welded beam optimization using neutrosophic goal programming technique. Adv. Fuzzy Math. 12, 515–538 (2017)
Sarkar, M., Roy, T.K.: Truss design optimization with imprecise load and stress in neutrosophic environment. Adv. Fuzzy Math. 12, 439–474 (2017)
Sarkar, M., Roy, T.K.: Optimization of welded beam with imprecise load and stress by parameterized intuitionistic fuzzy optimization technique. Adv. Fuzzy Math. 12, 577–608 (2017)
Sarkar, M., Roy, T.K.: Multi-objective welded beam design optimization using T-norm and T-conorm based intuitionistic Fuzzy optimization technique. Adv. Fuzzy Math. 12, 549–575 (2017)
Werner, B.: Interactive fuzzy programming systems. Fuzzy Sets Syst. 23, 133–178 (1987)
Acknowledgements
The research work of Mridula Sarkar is financed by Rajiv Gandhi National Fellowship [F1-17.1/2013-14-SC-wes-42549/(SA-III/Website)], Government of India.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interests
The authors declare that there is no conflict of interests.
Rights and permissions
About this article

Cite this article
Sarkar, M., Roy, T.K. Optimization of Welded Beam Structure Using Neutrosophic Optimization Technique: A Comparative Study. Int. J. Fuzzy Syst. 20, 847–860 (2018). https://doi.org/10.1007/s40815-017-0362-6
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40815-017-0362-6