
Abstract
This paper investigates a robust H ∞ sampled-data control problem for uncertain nonlinear systems with time-varying delay described by Takagi–Sugeno fuzzy model. By introducing the free-weighting matrices, new stability criteria are obtained in terms of linear matrix inequalities based on Lyapunov–Krasovskii functional theory. Then, a fuzzy sampled-data H ∞ controller is designed to achieve a prescribed disturbance attenuation level in the sense that the fuzzy closed-loop system is robustly asymptotically stable. Compared with the existing results, the obtained ones are less conservative without using the conservative crossing inequality and the Jensen integral inequality. Two illustrative examples are provided to show the effectiveness and the merits of the proposed method.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Fuzzy control approach offers a systematic and effective platform for analysis and synthesis of nonlinear control systems. It is shown that the this approach has been applied successfully in a wide range of engineering control designs such as tracking control [1], output feedback control [2–4], stability of continuous stirred tank reactor (CSTR) [5] and stabilization of computer-simulated truck-trailer [6].
It is well known that Takagi–Sugeno (T–S) fuzzy system [7] plays an important role in fuzzy control. It is used to represent the nonlinear systems, e.g., robotic system [8], CSTR [5] and truck-trailer system [6]. This model supplies a bridge between the nonlinear system and linear system and combines the linear control theory with the fuzzy logic concept. Therefore, the last decade witnessed a rapidly growing interest in T–S fuzzy system [9–13].
With the development of the digital circuit technologies, the controller is implemented by powerful microcontrollers and digital computers, which can be made available at simplicity, scalability and cost-effectiveness. In this case, the control signal is a constant during a sampling period and is changed at the sampling instant. Thus, the overall control system is referred as a sampled-data system. Recently, many works have researched analysis and synthesis of sampled-data control for nonlinear systems that is based on T–S fuzzy system in [10–43]. In [32, 35, 36, 42, 43], the direct discrete time design approach is used to develop the sampled-data controllers. The papers [28–31, 33, 34, 37–41] employ the input time-delay conversion method to present sampled-data control schemes.
Time delays appear in many practical engineering systems such as microwave oscillators, nuclear reactors and aircraft systems. The existence of time delays is frequently a source of instability and degraded performance. Thus, it is a challenge to develop the control theory of time-delay systems. Many efforts have been made in analysis and synthesis of time-delay systems during the last two decades [44–46]. Recently, fuzzy sampled-data control schemes are also proposed for nonlinear time-delay systems by using the input delay approach and Lyapunov–Krasovskii functional (LKF) theory in [12, 14, 18, 20]. With the aid of the free-weighting matrix approach, in [18, 20], some slack matrices are introduced to obtain the less conservative results. And Jensen’s integral inequality method [18, 20] is a powerful tool to provide a simpler form of stability and stabilization results. However, the system convergence rate decreased by using Jensen’s integral inequality to enlarge the LKF. Moreover, the conservative crossing inequality in [12, 14] also affects the system convergence rate. How to lessen this conservativeness is an open problem.
On the other hand, time delays are assumed to be constant in these works [12, 14, 18, 20]. Many practical systems show the problem of time-varying delays, such as mechanical systems [5] and network-based systems [47]. So, it is important to design a fuzzy sampled-data system to solve the effect of time-varying delays. Reliable sampled-data stabilization is discussed for time-varying delay systems in [21], and the paper [28] has paid attention to the study of fuzzy sampled-data filtering for time-varying delay systems. However, there is no focus concerned with the robust H ∞ sampled-data control for time-varying delays based on T–S fuzzy systems.
Based on above discussions, in this paper, we consider a robust H ∞ sampled-data control problem for uncertain nonlinear time-varying delay systems in T–S fuzzy form. By use of the input delay approach and introducing some free-weighting matrices, new sufficient conditions of H ∞ control with less conservatism are given in terms of linear matrix inequalities (LMIs). Illustrative examples of CSTR and computer-simulated truck-trailer are provided to demonstrate the feasibility of the proposed method.
The main contributions and advantages are summarized as follows:
-
1.
Considering the estimation of the sampling period, the delay bound and time-varying delay, the use of input delay approach and free-weighting matrix approach to fuzzy sampled-data T–S systems manifests a better performance and less conservativeness.
-
2.
Without using the conservative crossing inequality and the Jensen integral inequality, a less conservative stabilization design via fuzzy sampled-data control scheme is developed. With the improved system convergence rate, faster state responses are achieved. What's more, our method obtains a larger sampling interval. So, the proposed fuzzy sampled-data controller can lower the implementation cost and time.
Notations: Throughout this paper, the notations P > 0, P < 0 and P ≥ 0 denote a positive definite matrix, a negative definite semi-positive matrix and a semi-positive definite matrix, respectively. The transposed element is denoted by the notation ∗ in symmetric positions. P T is the transpose of a matrix P. Matrices are assumed to be compatible.
2 Problem Formulation
Consider the following uncertain nonlinear time-varying delay system, which is described by a T–S fuzzy system with uncertainties and time-varying delay:
Plant Rule i: IF \(X = \left[ {\begin{array}{*{20}c} {X_{11} } & {X_{12} } \\ * & {X_{22} } \\ \end{array} } \right] \ge 0\) is \(Y = \left[ {\begin{array}{*{20}c} {Y_{11} } & {Y_{12} } \\ * & {Y_{22} } \\ \end{array} } \right] \ge 0\) and \(\xi_{p} (t)\) is \(M_{ip}\), THEN
where \(i = 1, \ldots ,r\), r is the number of IF–THEN rules; \(x(t) \in R^{n}\), \(u(t) \in R^{m}\) and \(\omega (t) \in R^{q}\) are the state vector the input vector and the disturbance vector; \(\varphi (t)\) is the initial condition of the system state; \({\text{d}}(t)\) is a time-varying delay, \(0 \,\le\, d(t) \le d_{M}\) and \(\dot{d}(t) \le d_{D}\), where \(d_{M}\) and \(d_{D}\) are constants; h is the sample period; \(\bar{A}_{i} = A_{i} + \Delta A_{i} (t),\) \(\bar{A}_{id} = A_{id} + \Delta A_{id} (t)\) and \(\bar{B}_{i} = B_{i} + \Delta B_{i} (t)\); \(A_{i}\), \(A_{id}\), \(B_{i}\), \(B_{i\omega }\) \((i = 1,2, \ldots ,r)\) are constant matrices with compatible dimensions; \(\Delta A_{i} (t)\), \(\Delta A_{id} (t)\) and \(\Delta B_{i} (t)\) are time-varying matrices with appropriate dimensions, and are defined as
where \(D_{i}\), \(\begin{array}{*{20}c} {E_{ai} ,} & {E_{di} ,} & {E_{bi} } \\ \end{array}\) (\(i = 1,2, \ldots ,r\)) are known constant real matrices with appropriate dimensions; \(F_{i} (t)\) is an unknown real time-varying matrix with
By using a center average defuzzifier, product inference and singleton fuzzifier, the global dynamics of the T–S fuzzy system (1) can be inferred as
where
and \(M_{ij}\) \((\xi_{j} (t)\) is the membership value of \(\xi_{j} (t)\) in \(M_{ij}\). It is seen that \(\lambda_{i} (\xi (t))\) has the following properties:
For the T–S fuzzy system described in (1), the following fuzzy sampled-data controller via parallel distributed compensation approach can be expressed as follows:
Controller Rule j: IF \(\xi_{1} (t_{k} )\) is \(M_{j1}\) and \(\xi_{p} (t_{k} )\) is \(M_{jp}\), THEN
where \(K_{j}\) is the feedback gain, the time \(t_{k} (k = 0,1, \ldots )\) is the sampling instant, the sampling interval is assumed to satisfy \(0 < t_{{k +1}} - t_{k} = h_{k} \le h\). Thus, the output of the controller (5) is given by
By using input delay approach, fuzzy sampled-data controller (6) is converted to the following form
Substituting (7) into (1) yields the fuzzy closed-loop system
Consider the following H ∞ control performance
where \(\rho\) is a prescribed attenuation level, \(\rho^{2}\) can be minimized and the weighting positive definite matrix \(Q\) is specified beforehand according to the design purpose.
The purpose of this paper is to find a sampled-data state feedback controller such that the H ∞ performance in (9) with a minimized disturbance attenuation level \(\rho\) is achieved in the sense that the fuzzy closed-loop system (8) is robustly asymptotically stable.
Lemma 1
(Petersen and Hollot [48]) Let \(Q = Q^{T}\) , H, \(E\) and \(F(t)\) satisfying \(F^{T} (t)F(t) \le I\) are appropriately dimensional matrices, then the following inequality:
is true, if and only if the following inequality holds for any \(\varepsilon > 0\),
Remark 1
Our proposed control schemes are effective for nonlinear systems either constant or time-varying. Meanwhile, these schemes are feasible for nonlinear systems without or with uncertainties.
3 Fuzzy H ∞ Sampled-Data Control
In this section, we discuss the robust H ∞ sampled-data control problem of fuzzy closed-loop system ( 8 ) by use of the input delay approach and free-weighting matrix approach.
Theorem 1
For given the matrix \(Q > 0\) , given the scalars \(h > 0\), \(d_{M} > 0\), \(d_{D} > 0\), \(\mu > 0\), \(\varepsilon > 0\) , the H ∞ performance (9) with a minimized attenuation level \(\rho\) is achieve in the sense that the fuzzy closed-loop system ( 8 ) is robustly asymptotically stable if there exist matrices \(\bar{P} > 0\), \(\bar{W} > 0\), \(\bar{H} > 0\), \(\bar{R} > 0\), \(\bar{Z} > 0\), \(\bar{G} > 0\) , any appropriately dimensioned matrices
such that the LMIs (10), (11) and (12) are feasible for all \(i,j = 1,2, \ldots ,r\),
where
with
and the state feedback control gains \(K_{j} = \overline{{K_{j} }} \overline{P}^{ - 1}\) (\(j = 1,2, \ldots ,r\)).
Proof
Choose the following Lyapunov–Krasovskii functional:
where
with \(P > 0\), \(W > 0\), \(H > 0\), \(R > 0\), \(Z > 0\), \(G > 0\).
Taking the derivative of V with respect to t yields that
For a given scalar \(\mu > 0\) in fuzzy closed-loop system (8), the following equality is true:
By use of the Newton–Leibniz formula, for appropriately dimensioned matrices \(N,M,S,T\), the following equations hold:
where
For semi-positive definite matrices
the following equations hold:
where
with
Pre- and post-multiplying \(\varSigma_{ij}\) in (28) by \(diag[\begin{array}{*{20}c} {\begin{array}{*{20}c} {P^{ - 1} } & {P^{ - 1} } & {P^{ - 1} } & {P^{ - 1} } & {P^{ - 1} } & {P^{ - 1} } \\ \end{array} } & I \\ \end{array} ]\)with
we have
where
From Lemma 1, \(\bar{\varSigma }_{ij} < 0\) in (31) is equivalent to
By using Schur complement, (32) is equivalent to
where
Based on Schur complement, \(\varPi_{ij} < 0\) is equivalent to \(\varPi_{ij}^{\prime } < 0\). Thus, \(\varSigma_{ij} < 0\) is equivalent to \(\varPi_{ij} < 0\).
Pre- and post-multiplying the matrices \(\psi_{1} ,\psi_{2}\) in (29) and \(\phi_{1} ,\phi_{2}\) in (30) by \(diag[\begin{array}{*{20}c} {P^{ - 1} } & {P^{ - 1} } & {P^{ - 1} } \\ \end{array} ]\), we have \(\varPsi_{1} ,\varPsi_{2}\), \(\varPhi_{1}\) and \(\varPhi_{2}\). \(\varPsi_{1} \ge 0,\varPsi_{2} \ge 0,\varPhi_{1} \ge 0,\varPhi_{2} \ge 0\) in (11–12) are equivalent to \(\psi_{1} \ge 0,\psi_{2} \ge 0,\phi_{1} \ge 0,\phi_{2} \ge 0\) in (29–30), respectively.
If \(\omega (t) \equiv 0\), there exists a constant \(\gamma > 0\) such that
Thus, the fuzzy closed-loop system (8) is robustly asymptotically stable.
Under zero initial condition, integrating both sides of (27) from 0 to t and letting t → ∞, we have
Thus, the proof is completed.
If there do not exist the uncertainties in the controlled system (1), we have the following Corollary 1.
Corollary 1
For given the matrix \(Q > 0\) , given the scalars \(h > 0\), \(d_{M} > 0\), \(d_{D} > 0\), \(\mu > 0\) , the H ∞ performance (9) with a minimized attenuation level \(\rho\) is achieved in the sense that the fuzzy closed-loop system (8) is robustly asymptotically stable if there exist matrices \(\bar{P} > 0\), \(\bar{W} > 0\), \(\bar{H} > 0\), \(\bar{R} > 0\), \(\bar{Z} > 0\), \(\bar{G} > 0\) , any appropriately dimensioned matrices
such that the LMIs (11), (12) and (13) are feasible. And the state feedback control gains \(K_{j} = \overline{{K_{j} }} \overline{P}^{ - 1}\) (\(j = 1,2, \ldots ,r\)).
If there do not exist the uncertainties and time delays in the controlled system (1), we have the following Corollary 2.
Corollary 2
For given the matrix \(Q > 0\) , given the scalars \(h > 0\), \(\mu > 0\) , the H ∞ performance (9) with a minimized attenuation level \(\rho\) is achieved in the sense that the fuzzy closed-loop system (8) is robustly asymptotically stable if there exist matrices \(\bar{P} > 0\),\(\bar{W} > 0\),\(\bar{H} > 0\),\(\bar{R} > 0\), \(\bar{Z} > 0\),\(\bar{G} > 0\), any appropriately dimensioned matrices
such that the LMIs (12) and (35) are feasible for all \(i,j = 1,2, \ldots ,r\),
where
And the state feedback control gains \(K_{j} = \overline{{K_{j} }} \overline{P}^{ - 1}\) (\(j = 1,2, \ldots ,r\)).
3.1 Design Procedure
The fuzzy sampled-data H ∞ control for the time-varying delay system is summarized as follows:
-
Step 1: Select membership functions and fuzzy rules in (1).
-
Step 2: Give the upper bound of sampling interval \(h > 0\), the upper bounds of time delay \(d_{M} > 0\), \(d_{D} > 0\) and the scalars \(\mu > 0,\varepsilon > 0\).
-
Step 3: Solve the LMIs (10–12) to obtain \(\overline{{K_{j} }}\) (\(j = 1,2, \cdot \cdot \cdot ,L\)) and \(\overline{P}\). Thus,\(K_{j} = \overline{{K_{j} }} \overline{P}^{ - 1}\) (\(j = 1,2, \ldots ,L\)) can also be obtained.
-
Step 4: Increase h, and repeat Step 3 until \(\overline{{K_{j} }}\) (\(j = 1,2, \cdot \cdot \cdot ,L\)) and \(\overline{P}\) cannot be found.
-
Step 5: Construct the fuzzy sampled-data controller (4).
Remark 2
In this paper, the conservative crossing inequality and the Jensen integral inequality are not used to enlarge the LKF, which helps to improve the asymptotic convergence rate. Due to the improved system convergence rate, with the same state responses, the proposed method in this paper will show a larger sampling interval. In the demonstration of superiority, the compared results of sampling interval will be given rather than those of state responses. Illustrative results will demonstrate the merits of our proposed method. That is to say, a better system performance is achieved.
4 Illustrative Examples
In this section, CSTR and computer-simulated truck-trailer are given to illustrate the effectiveness and the feasibility of fuzzy H ∞ sampled-data control design.
Example 1
Consider the following CSTR system [5]
where \(x_{1} (t)\) corresponds to the conversion rate of the reactor, \(0 \le x_{1} (t) \le 1\), \(x_{2} (t)\) is the dimensionless temperature.\(\gamma_{0} = 20,H = 8,D_{\sigma } = 0.072,v = 0.8,\;\beta = 0.3\). \(w(t)\) is the bounded external disturbance \(x(t) = [x_{1} (t),{\kern 1pt} {\kern 1pt} {\kern 1pt} x_{2} (t)]^{T}\), \(\left[ {x_{1} (0)\quad {\kern 1pt} {\kern 1pt} {\kern 1pt} x_{2} (0)} \right] = \left[ {\begin{array}{*{20}c} {0.5} & { - 1} \\ \end{array} } \right]\).
A three-rule T–S fuzzy model is used to represent the nonlinear CSTR system.
Rule 1: IF \(x_{2} (t)\) is about 0.8862, THEN
Rule 2: IF x 2 (t) is about 2.7520, THEN
Rule 3: IF \(x_{2} (t)\) is about 4.7052, THEN
where
\(\omega (t) = \left[ {\begin{array}{*{20}c} 0 \\ {w(t)} \\ \end{array} } \right]\), and \(w(t) = 0.5e^{ - 0.1t} \sin (0.1t)\).
The membership functions are defined as
A three-rule sampled-data fuzzy controller is employed to stabilize the CSTR system:
By using the input delay approach, the sampled-data controller is converted to time-varying delay signal to guarantee the system stability.
Firstly, we consider that there does not exist time delay. By using the methods of [17] and Corollary 2, the maximum allowable upper bounds of sampling interval under \(\rho = 0.5\) and \(\rho = 1\) are given in Table 1.
Table 1 shows that the method in this paper can get a larger sampling interval, which is less conservative than the approach in [17]. This implies that a better performance is achieved in this paper.
We design the controller for time-varying delay \(\tau = 0.2 + 0.2\cos t\). The maximum allowable upper bound of sampling interval that is obtained by Corollary 1 is given in Table 2. Similarly, other design parameters are given \(Q = diag\{ 1\,\;15\} \times 10^{ - 3}\), \(\mu = 0.08\).
When time-varying delay \(\tau\) is \(0.5 + 0.45\cos t\), Corollary 1 gives the maximum allowable upper bound of sampling interval \(h = 0.182\) with the design parameters \(Q = diag\{ 1\,\;15\} \times 10^{ - 3}\), \(\rho { = 1} . 0\), \(\mu = 0.08\), \(d_{M} = 0.95\), \(d_{D} = 0.45\) and the fuzzy state feedback control gains
The sampled-data fuzzy controller with the above control gains is applied to the CSTR system, and the state responses and control input are shown in Figs. 1 and 2, respectively.

State responses x 1, x 2

Control input u
Figure 1 shows the asymptotic stability the CSTR (36) by the proposed fuzzy H ∞ sampled-data controller. Figure 2 depicts the sampled-data behavior of fuzzy controller.
One design purpose of this paper is a sufficient condition is provided to obtain feedback control gains. By solving the LMIs in Theorem 1 (Corollary 1 or Corollary 2), we can obtain a feasible solution rather than a unique one. Like, \(K_{1} = K_{2} = K_{3}\) is a feasible solution, \(K_{1} \ne K_{2} \ne K_{3}\) is also suitable. In this example, K 1, K 2 and K 3 are same. And, in the following example 2, K 1, K 2 and K 3 are different.
Example 2
Consider the computer-simulated truck-trailer system [6]
where x 2(t), \(\;\dot{x}(t) = A_{2} x(t) + A_{2d} x(t - \tau_{d} ) + B_{2} u(t) + w(t)\), x 2(t), \(\;\dot{x}(t) = A_{3} x(t) + A_{3d} x(t - \tau_{d} ) + B_{3} u(t) + w(t)\), \(\bar{t} = 2.0\), t 0 = 0.5, \(x_{1} (t) \in [ - \pi /2,\quad \pi /2]\), \(\dot{x}_{1} (t) \in [ - 3,3]\), \(x_{2} (t) \in [ - \pi /2,\quad \pi /2]\), \(\dot{x}_{2} (t) \in [ - 2,2]\), w(t) is the external bounded disturbance. \(\dot{x}(t) \in [x_{1} (t)x_{2} (t)x_{3} (t)]^{T}\), \([x_{1} (0)x_{2} (0)x_{3} (0)] = [1.5\, - 2\,5]\).
The nonlinear truck-trailer system is modeled by a two-rule T–S fuzzy model:
Rule 1: IF \(\theta (t) = x_{2} (t) + a(v\overline{t} /2L)x_{1} (t) + (1 - a)(v\overline{t} /2L)x_{1} (t - t_{d} )\) is about 0,
Rule 2: IF \(\theta (t) = x_{2} (t) + a(v\overline{t} /2L)x_{1} (t) + (1 - a)(v\overline{t} /2L)x_{1} (t - t_{d} )\) is about π or - π,
where
F(t) = sin (t), d = 10t 0/π and w(t) = 0.5e −0.1t sin (0.1t).
The membership functions are defined as
We design the following fuzzy sampled-data control law:Rule 1: IF \(\theta (t) = x_{2} (t) + a(v\overline{t} /2L)x_{1} (t) + (1 - a)(v\overline{t} /2L)x_{1} (t - t_{d} )\) is about 0,THEN u(t) = K 1 x(t k ), Rule 2: IF \(\theta (t) = x_{2} (t) + a(v\overline{t} /2L)x_{1} (t) + (1 - a)(v\overline{t} /2L)x_{1} (t - t_{d} )\) is about π or − π, THEN u(t) = K 2 x(t k ).
By using the input delay approach, the sampled-data controller is converted to time-varying delay signal to guarantee the system stability.
First, we assume that there is no uncertainty in the truck-trailer system.
If the delay is time-invariant, i.e., d D = 0. By the methods of [20] and Corollary 1, the maximum allowable upper bounds of sampling interval under \(\rho { = }0.5\) and \(\rho { = }1\) for given time delays are given in Tables 3 and 4.
Tables 3 and 4 show that the method in this paper is less conservative than the approach in [20]. This implies that the proposed method achieves a better performance.
If the delays is time-varying, we design the controller for time-varying delay t d = 0.2 + 0.2 cos t. The maximum allowable upper bounds of sampling interval that are obtained by Corollary 1 are given in Table 5, and the other design parameters are also given by \(Q = diag\{ 2\,\;30\;6\} \times 10^{ - 4} ,\) μ = 0.8.
Next, we consider that there have the uncertainties in the truck-trailer system.
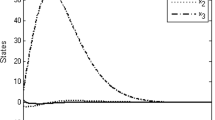
When time-varying delay t d is \(0.5 + 0.45\cos t\), Theorem 1 gives the maximum allowable upper bound of sampling interval h max = 0.209 with the design parameters\(Q = diag\{ 2\,\;30\;6\} \times 10^{ - 4} ,\) \(\rho = 0.8,\varepsilon = 1\), μ = 0.1, d M = 0.95, d D = 0.45 and the fuzzy state feedback control gains
Based on the sampled-data fuzzy controller with the above control gains, the stability of the truck-trailer system and the sampled-data behavior of fuzzy controller are shown in Figs. 3, 4 5 and 6, respectively.

State response x 1

State response x 2

State response x 3

Control input u
Two illustrative examples demonstrate the effectiveness and the merits of the proposed method.
From these data, it is known that, without using the conservative crossing inequality and the Jensen integral inequality, our H ∞ controller achieved a prescribed disturbance attenuation level in the sense that the fuzzy closed-loop system is robustly asymptotically stable. It means, our method is effective and can lower implementation cost and time.
5 Conclusion
This paper is concerned with the fuzzy H ∞ sampled-data control problem for uncertain nonlinear systems with time-varying delay. A fuzzy sampled-data H ∞ controller is designed to guarantee the system stability and achieve a prescribed disturbance attenuation level. Compared with the existing ones, the obtained H ∞ criteria are less conservative with the improved system convergence rate and the larger sampling interval. Two illustrative examples are provided to show the advantage of the proposed method.
The proposed control approach could be applied in engineering systems with the property of time-varying delay. On the one hand, faster system convergence rate is a basic requirement in control system design. On the other hand, sampled-data control could meet engineering requirement. For sampled-data controller, this paper supplies a method to improve the system convergence rate and lower implementation cost and time. Thus, the proposed results show a significant practical value.
In the control system design, the controller is sampled-data signal. In fact, the controller design with the analog-to-digital (AD) converter and the digital-to-analog (DA) converter is of engineering value. In the following, our method could be extended to this problem.
References
Chen, C., Liu, Z., Zhang, Y., Chen, C.L.P., Xie, S.-L.: Saturated Nussbaum function based approach for robotic systems with unknown actuator dynamics. IEEE Trans. Cybern. (2015). doi:10.1109/TCYB.2015.2475363
Chen, C., Liu, Z., Zhang, Y., Chen, C.L.P., Xie, S.-L.: Asymptotic fuzzy tracking control for a class of stochastic strict-feedback systems. IEEE Trans. Fuzzy Syst. (2016). doi:10.1109/TFUZZ.2016.2566807
Li, Y.-M., Tong, S.-C., Liu, Y.-J., Li, T.-S.: Adaptive fuzzy robust output feedback control of nonlinear systems with unknown dead zones based on a small-gain approach. IEEE Trans. Fuzzy Syst. 22(1), 164–176 (2014)
Li, Y.-M., Tong, S.-C., Liu, Y.-J., Li, T.-S.: Adaptive fuzzy output feedback dynamic surface control of interconnected nonlinear pure-feedback systems. IEEE Trans. Cybern. 45(1), 138–149 (2015)
Cao, Y.-Y., Frank, P.M.: Analysis and synthesis of nonlinear time delay systems via fuzzy control approach. IEEE Trans. Fuzzy Syst. 22(2), 200–211 (2000)
Cao, Y.-Y., Frank, P.M.: Stability analysis and synthesis of nonlinear time-delay systems via linear Takagi-Sugeno fuzzy models. Fuzzy Sets Syst. 124(2), 213–229 (2001)
Takagi, T., Sugeno, M.: Fuzzy identification of systems and its applications to modeling and control. IEEE Trans. Syst. Man Cybern. SMC-15(1), 116–132 (1985)
Chen, C., Liu, Z., Zhang, Y., Chen, C.L.P., Xie, Shengli: Saturated Nussbaum function based approach for robotic systems with unknown actuator dynamics. IEEE Trans. Cybern. (2015). doi:10.1109/TCYB.2015.2475363
Tanaka, K., Sugeno, M.: Stability analysis and design of fuzzy control systems. Fuzzy Sets Syst. 45(2), 135–156 (1992)
Katayama, H., Ichikawa, A.: H∞ control for sampled-data nonlinear systems described by Takagi-Sugeno fuzzy systems. Fuzzy Sets Syst. 148(3), 431–452 (2004)
Gao, H.-J., Chen, T.-W.: Stabilization of nonlinear systems under variable sampling: a fuzzy control approach. IEEE Trans. Fuzzy Syst. 15(5), 972–983 (2007)
Lam, H.K., Leung, F.H.: Sampled-data fuzzy controller for time-delay nonlinear systems: fuzzy-model-based LMI approach. IEEE Trans. Syst. Man Cybern. Part B Cybern. 37(3), 617–629 (2007)
Lam, H.K., Ling, W.K.: Sampled-data fuzzy controller for continuous nonlinear systems. IET Control Theory Appl. 2(1), 32–39 (2008)
Yang, D.-Y., Cai, K.-Y.: Reliable H∞ non-uniform sampling fuzzy control for nonlinear systems with time delay. IEEE Trans. Syst. Man Cybern. Part B Cybern. 38(6), 1606–1613 (2008)
Lam, H.K., Seneviratne, L.D.: Tracking control of sampled-data fuzzy-model-based control systems. IET Control Theory Appl. 3(1), 56–67 (2009)
Kim, D.W., Lee, H.J.: Stability connection between sampled-data fuzzy control systems with quantization and their approximate discrete-time model. Automatica 45(6), 1518–1523 (2009)
Yoneyama, J.: Robust H∞ control of uncertain fuzzy systems under time-varying sampling. Fuzzy Sets Syst. 161(6), 859–871 (2010)
Lien, C.-H., Yu, K.-W., Huang, C.-T., Chou, P.-Y., Chung, L.-Y., Chen, J.-D.: Robust H∞ control for uncertain T–S fuzzy time-delay systems with sampled-data input and nonlinear perturbations. Nonlinear Anal. Hybrid Syst. 4(3), 550–556 (2010)
Yoneyama, J.: Robust guaranteed cost control of uncertain fuzzy systems under time-varying sampling. Appl. Soft Comput. 11(1), 249–250 (2011)
Chen, P., Han, Q.-L., Yue, D., Tian, E.-G.: Sampled-data robust H∞ control for T–S fuzzy systems with time delay and uncertainties. Fuzzy Sets Syst. 179(1), 20–33 (2011)
Yang, F.-S., Zhang, H.-G.: T–S model-based relaxed reliable stabilization of networked control systems with time-varying delays under variable sampling. Int. J. Fuzzy Syst. 13(4), 260–269 (2011)
Lam, H.K.: Stabilization of nonlinear systems using sampled-data output-feedback fuzzy controller based on polynomial-fuzzy-model-based control approach. IEEE Trans. Syst. Man Cybern. Part B Cybern. 42(1), 258–267 (2012)
Zhu, X.-L., Chen, B., Yue, D., Wang, Y.-Y.: An improved input delay approach to stabilization of fuzzy systems under variable sampling. IEEE Trans. Fuzzy Syst. 20(2), 330–341 (2012)
Koo, G.B., Park, J.B., Joo, Y.H.: Exponential mean-square stabilisation for non-linear systems: sampled-data fuzzy control approach. IET Control Theory Appl. 6(18), 2765–2774 (2012)
Huang, J., Shi, Y., Huang, H.-N., Li, Z.: l2 − l∞ filtering for multirate nonlinear sampled-data systems using T–S fuzzy models. Digit. Signal Proc. 23(1), 418–426 (2013)
Zhu, X.-L., Chen, B., Wang, Y.-Y., Yue, D.: H∞ stabilization criterion with less complexity for nonuniform sampling fuzzy systems. Fuzzy Sets Syst. 225(16), 58–73 (2013)
Koo, G.B., Park, J.B., Joo, Y.H.: Guaranteed cost sampled-data fuzzy control for non-linear systems: a continuous-time Lyapunov approach. IET Control Theory Appl. 7(13), 1745–1752 (2013)
Ge, X.-H., Han, Q.-L., Jiang, X.-F.: Sampled-data H∞ filtering of Takagi-Sugeno fuzzy systems with interval time-varying delays. J. Franklin Inst. 351(5), 2515–2542 (2014)
Wu, Z.-G., Shi, P., Su, H.-Y., Chu, J.: Sampled-data fuzzy control of chaotic systems based on a T–S fuzzy model. IEEE Trans. Fuzzy Syst. 22(1), 153–163 (2014)
Jing, X.-J., Lam, H.K., Shi, P.: Fuzzy Sampled-data control for uncertain vehicle suspension systems. IEEE Trans. Cybern. 44(7), 1111–1126 (2014)
Yang, F.-S., Zhang, H.-G., Wang, Y.-C.: An enhanced input-delay approach to sampled-data stabilization of T–S fuzzy systems via mixed convex combination. Nonlinear Dyn. 75(3), 501–512 (2014)
Jiang, X.-F.: On sampled-data fuzzy control design approach for T–S model-based fuzzy systems by using discretization approach. Inf. Sci. 296(1), 307–314 (2015)
Li, H.-Y., Sun, X.-J., Shi, P., Lam, H.K.: Control design of interval type-2 fuzzy systems with actuator falut: sampled-data control approach. Inf. Sci. 302(1), 1–13 (2015)
Liu, H., Zhou, G.-P.: Finite-time sampled-data control for switching T–S fuzzy systems. Neurocomputing 166(20), 294–300 (2015)
Koo, G.B., Park, J.B., Joo, Y.-H.: LMI condition for sampled-data fuzzy control of nonlinear systems. Electron. Lett. 51(1), 29–31 (2015)
Kim, H.J., Koo, G.B., Park, J.-B., Joo, Y.-H.: Decentralized sampled-data H∞ fuzzy filter for nonlinear large-scale systems. Fuzzy Sets Syst. 273(15), 68–86 (2015)
Xiao, H.-Q., He, Y., Wu, M., Xiao, S.-P., She, J.-H.: New results on H∞ tracking control based on the T–S fuzzy model for sampled-data networked control system. IEEE Trans. Fuzzy Syst. 23(6), 2439–2448 (2015)
Wu, Z.-G., Shi, P., Su, H.Y., Lu, R.-Q.: Dissipativity-based sampled-data fuzzy control design and its application to truck-trailer system. IEEE Trans. Fuzzy Syst. 23(5), 1669–1679 (2015)
Liu, C., Lam, H.K.: Design of a polynomial fuzzy observer with controller sampled-output measurements for nonlinear systems considering unmeasurable premise variables. IEEE Trans. Fuzzy Syst. 23(6), 2067–2079 (2015)
Wang, Z.-P., Wu, H.-N.: On fuzzy sampled-data control of chaotic systems via a time-dependent Lyapunov functional approach. IEEE Trans. Cybern. 45(4), 819–829 (2015)
Wang, Z.-P., Wu, H.-N.: Finite dimensional guaranteed cost sampled-data fuzzy control for a class of nonlinear distributed parameter systems. Inf. Sci. 327(10), 21–39 (2016)
Kim, D.W., Lee, H.J.: Direct discrete-time design approach to robust H∞ sampled-data observer-based output-feedback fuzzy control. Int. J. Syst. Sci. 47(1), 77–91 (2016)
Koo, G.B., Park, J.B., Joo, Y.H.: Intelligent digital redesign for non-linear systems: observer-based sampled-data fuzzy control approach. IET Control Theory Appl. 10(1), 1–9 (2016)
Li, Y.-M., Tong, S.-C., Li, T.-S.: Hybrid fuzzy adaptive output feedback control design for mimo time-varying delays uncertain nonlinear systems. IEEE Trans. Fuzzy Syst. (2015). doi:10.1109/TFUZZ.2015.2486811
Kang, Y., Zhai, D.-H., Liu, G.-P., Zhao, Y.-B., Zhao, P.: Stability analysis of a class of hybrid stochastic retarded systems under asynchronous switching. IEEE Trans. Autom. Control 59(6), 1511–1523 (2014)
Liu, F., Wu, M., He, Y., Yokoyama, R.: New delay-dependent stability criteria for T–S fuzzy systems with time-varying delay. Fuzzy Sets Syst. 161(15), 2033–2042 (2010)
Cloosterman, M., van de Wouw, N., Heemels, W., Nijmeijer, H.: Stability of networked control systems with uncertain time-varying delays. IEEE Trans. Autom. Control 54(7), 1575–1580 (2009)
Petersen, I.R., Hollot, C.V.: A Riccati equation approach to the stabilization of uncertain linear systems. Automatica 22(4), 397–411 (1986)
Acknowledgments
This work was supported by the National Natural Science Foundation of China (61203320, 61572419).
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Du, Z., Qin, Z., Ren, H. et al. Fuzzy Robust H ∞ Sampled-Data Control for Uncertain Nonlinear Systems with Time-Varying Delay. Int. J. Fuzzy Syst. 19, 1417–1429 (2017). https://doi.org/10.1007/s40815-016-0249-y
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40815-016-0249-y