
Abstract
A theoretical analysis has been carried out to investigate into the effect of turbulence and journal misalignment on the steady-state characteristics of hydrodynamic journal bearings lubricated with micropolar fluid. The governing non-dimensional Reynolds equation applicable to turbulent micropolar lubrication has been solved numerically to obtain the film pressure distribution which was then used to determine the load carrying capacity, attitude angle, misalignment moment, end flow rate and frictional parameter. The turbulent shear coefficients have been computed by using the turbulent model proposed by Ng and Pan. The results suggest that the effect of turbulence is to increase the load carrying capacity and misalignment moment of the misaligned journal bearings, and this effect is more pronounced for micropolar fluid as compared to Newtonian fluid.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Turbulence in journal bearings is very common phenomena nowadays in the applications of large turbomachinery operating at relatively high speed with large diameters and in machines using process fluids of low viscosity. In the field of turbulent lubrication, Prandtl’s mixing length concept was used by Constantinescu [1, 2] and Reichardt’s eddy diffusivity concept was used by Ng and Pan [3] for the analysis of bearings operating in turbulent regime. Among these two turbulent models, application of Ng–Pan model of turbulent lubrication was suggested by Taylor et al. [4] for better and more accurate results.
In the literatures mentioned so far, the lubricants have been considered as Newtonian fluid. But in practice, most of the lubricants are blended with additives to improve the lubricating effectiveness. Moreover, after few cycles of operations, the lubricants often get contaminated with suspended particles or dirt. These makes the lubricant to behave as non-Newtonian fluid, and hydrodynamic lubrication theories developed for Newtonian fluids yield erroneous results for such lubricants. Therefore, to analyze the lubrication problem of such fluids, the theory of micropolar fluids [5] which are characterized by the presence of suspended rigid microstructure particles has been applied. The investigation on the lubrication theory of micropolar fluids was initiated by Allen and Kline [6]. Later on, many research works [7,8,9,10,11] had been carried out using the micropolar theory of lubrication to find out the effect of non-Newtonian lubricants on the bearing performances. So far, extensive works [12,13,14,15,16,17] have been carried out to analyze the steady-state characteristics on misaligned hydrodynamic journal bearings lubricated with non-Newtonian fluid. An analytical model was developed by Nikolakopoulos and Papadopoulos [18] to formulate a relationship between wear depth, misalignment angle and frictional force in case of journal bearing operating under severe lubricating conditions. Enhancement in friction coefficient and power loss was observed with increase in wear depth. A theoretical investigation on water-lubricated misaligned journal bearing with rigid bush materials has been carried out by Zhang et al. [19] to determine the load carrying capacity. In a recent work, Lv et al. [20] made an attempt to provide an efficient method in order to analyze equivalent supporting point location and load capacity of journal bearing with misalignment in vertical direction without using numerical simulation.
Until last century, the applications of turbulent lubrication theories were limited to the analysis of problems where the lubricants were assumed to be Newtonian. Early of this century, in a very interesting work, micropolar fluid theory has been combined with Constantinescu’s turbulent model by Faralli et al. [21] to obtain the modified Reynolds equation applicable to turbulent micropolar lubrication and analyze the steady-state characteristics of worn spherical bearings. Recently, the effect of turbulence on the static performance of misaligned hydrodynamic journal bearings lubricated with coupled stress fluids has been studied by Shenoy et al. [15]. In this work, an improvement of load capacity with reduced friction and end leakage flow has been observed for turbulent flow of lubricant. Following similar methodology, as suggested by Faralli et al. [21], the modified Reynolds equation applicable to turbulent micropolar lubrication has been derived by Das et al. [22] to analyze the steady-state performance characteristics of finite hydrodynamic journal bearings. However, no such literature is available up to date which analyzes the steady-state characteristics of misaligned journal bearings lubricated with micropolar fluid operating in turbulent regime. Hence, in this paper, an attempt has been made to extend the turbulent lubrication theory applicable to micropolar lubricants to predict the steady-state characteristics of misaligned finite journal bearings in terms of load carrying capacity, attitude angle, misalignment moment, end flow rate and frictional parameter.
2 Analysis
2.1 Modified Reynolds equation
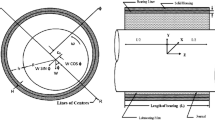
A schematic diagram of a misaligned hydrodynamic journal bearing used in the analysis is shown in Fig. 1. It is considered that the journal rotates with an angular velocity of Ω rad/s about its axis. The governing modified steady-state Reynolds equation for misaligned journal bearing operating under micropolar lubrication in turbulent regime is given by [21]

Configuration of the misaligned journal bearing geometry
where \( \Phi _{x,z} \left( {h,\varLambda ,N} \right) = \frac{{h^{3} }}{{k_{x,z} }} +\Lambda ^{2} h - \frac{{N\varLambda h^{2} }}{2}\coth \left( {\frac{Nh}{2\varLambda }} \right) \)
Using the following substitutions:
Equation (1) can be written in the as follows:
where
The values of the turbulent shear constants (Aθ, Bθ, \( \, C_{{\bar{z}}} \) and \( \, D_{{\bar{z}}} \)) have been obtained from the work of Ng et al. [3].
As the film thickness \( \overline{h} \) is a function of \( \theta {\text{ and }}\bar{z} \), \( \Phi _{{\theta ,\bar{z}}} \left( {\bar{h}_{0} ,l_{m} ,N} \right) \) are also functions of \( \theta {\text{ and }}\bar{z} \).
In case of journal misalignment inside the bearing as shown in Fig. 1, the expression for non-dimensional film thickness is expressed as
where, \( \varepsilon^{\prime } ,\varepsilon_{\hbox{max} }^{\prime } ,\alpha_{0} \) and ψ are already defined by Das et al. [14].
where, Dm is known as degree of misalignment as defined below
2.2 Boundary conditions
The following boundary conditions are used to solve Eq. (2) to obtain the steady-state film pressure distribution.
where θc represents the angular coordinate at which film cavitations occur.
2.3 Numerical procedure
Equation (2) is discretized into the finite central difference form with rectangular mesh size of \( \left( {\Delta \theta \times \Delta \bar{z}} \right) \) and solved by the Gauss–Seidel iterative procedure using the successive over-relaxation scheme, satisfying the boundary conditions as given in (5).
Equation (2) is discretized into finite difference form as follows:
where
Now, Eq. (6) is written in the following form:
where,
To implement the above numerical procedure, a uniform grid size is adopted in the circumferential (120 divisions) and axial direction (20 divisions). Iteration is started considering initial pressures at all mesh points as zeros, and the computed grid pressures are modified through successive over-relaxation scheme. For calculating film pressure at each set of input parameters, the following convergence criterion is adopted.
With the computed values of the pressures, the steady-state performance characteristics of the misaligned journal bearings are calculated.
3 Steady-state bearing performance characteristics
3.1 Load carrying capacity and attitude Angle
The steady-state load components along the line of centers and perpendicular to the line of centers in non-dimensional form are given by
Utilizing the above non-dimensional load components, the non-dimensional steady-state load carrying capacity and attitude angle are computed as follows:
3.2 Misalignment moment
For steady-state operating conditions, the misalignment moments are calculated directly from the steady-state pressure distributions. The radial and tangential components of misalignment moment in non-dimensional form are expressed as
Total misalignment moment in dimensionless form is thus obtained as follows:
3.3 End flow rate
The volume flow rate in dimensionless form along the z-axis form the bearing rear end, front end and as a whole is expressed by
The non-dimensional end flow rate is thus obtained first by finding numerically \( \left[ {\frac{{\partial \bar{p}}}{{\partial \bar{z}}}} \right]_{{\bar{z} = + 1}} \) following backward difference formula of order \( \left[ {\left( {\Delta \bar{z}^{2} } \right)} \right] \) and then by numerical integration using Simpson’s one-third formula.
3.4 Frictional parameter
The non-dimensional frictional force is given by [14]
where, \( \left( {\bar{h}} \right)_{\text{cav}} = 1 + \varepsilon_{0} \cos \theta_{c} \)
The non-dimensional surface shear stress, \( \bar{\tau }_{c} \) is obtained by considering the following expression as suggested by Taylor et al. [4] for dominant Couette flow
\( \bar{\tau }_{c} = 1 + 0.00099\left( {Re_{h} } \right)^{0.96} \) where, \( \bar{\tau }_{c} = \frac{{\tau_{c} h}}{{\mu\Omega R}} \)
The frictional parameter is consequently obtained as follows:
4 Results and discussions
It is evident from Eq. (1) that the film pressure distribution and consequently the load carrying capacity, misalignment moment, end flow rate and frictional parameter depend on the parameters viz. the slenderness ratio (L/D), eccentricity ratio (ɛ0), micropolar characteristic length (lm), coupling number (N), degree of misalignment (Dm) and average Reynolds number (Re). A theoretical study has been carried out to analyze the steady-state performance of misaligned journal bearing under micropolar lubrication operating in turbulent flow regime.
4.1 Validation of results
As there is no available literature that gives the experimental data on this kind of analysis, the results of the present work have been validated by comparing the data obtained from the work of Elsharkawy [23] for laminar flow of Newtonian lubricant and presented in Figs. 2 and 3. Figure 2 presents the comparison of load capacity obtained in the present study and that obtained by Elsharkawy [23] for different values of degrees of misalignment. Figure 3 shows the comparison of values of frictional parameter obtained from the aforesaid two analyses.

Comparison of values of load capacity obtained in the present study and by Elsharkawy [23]

Comparison of values of frictional parameter obtained in the present study and by Elsharkawy [23]
The results of the present study have also been compared with those obtained by Das et al. [14] for laminar flow of micropolar lubricants and presented in Fig. 4. The comparison shows that the values obtained for load carrying capacity and frictional parameter vary marginally with those obtained by Das et al. [14]. Also in both the analysis, similar trend of variation of load carrying capacity and frictional parameters has been observed.

Comparison of results obtained in the present study and by Das et al. [14]
4.2 Steady-state pressure profile
Pressure profiles for micropolar fluid lubricated misaligned journal bearing with lm = 15.0, N2 = 0.3 and Dm = 0.6 at L/D = 1.0,ɛ0 = 0.4 are plotted and presented in Fig. 5a for laminar flow and in Fig. 5b for turbulent flow. It is observed that the pressure developed in case of turbulent flow is higher than that obtained in case of laminar flow of lubricant. With enhancement in Reynolds number, the turbulent shear coefficients kθ and \( k_{{\bar{z}}} \) increase, resulting in reduction in the values of the film thickness terms \( \frac{{\bar{h}^{3} }}{{k_{\theta } }} \) and \( \frac{{\bar{h}^{3} }}{{k_{{\bar{z}}} }} \). This causes an enhancement in pressure in the fluid film. Hence, higher film pressure is observed when the lubricant flow in the bearing is turbulent in nature.

a Pressure profile of micropolar fluid at laminar flow, b Pressure profile of micropolar fluid at turbulent flow
4.3 Load carrying capacity and attitude Angle
The effect of Dm on dimensionless load carrying capacity and attitude angle as a function of lm is shown in Fig. 6. It is seen that \( \bar{W} \) decreases with an increase in Dm up to Dm = 0.5 and \( \bar{W} \) increases considerably with further increase in Dm. This trend is reversed in case of attitude angle. Further, it is observed that for any value of Dm, load carrying capacity decreases as lm → ∞. This is because of the fact that as lm → ∞, the micropolar effect vanishes and the fluid converts to a Newtonian fluid. On the other hand, the micropolar effect becomes significant with decrease in the value of lm, as the microrotational effect of the substructure present in the fluid imparts an additional spin viscosity to the lubricant. Hence, there is an increase in the effective viscosity of the micropolar fluid resulting in higher film pressure which in turn increases the load carrying capacity of the lubricant.

Variation of \( \bar{W} \) and \( \phi_{0} \) with lm for different values of Dm
Figure 7 shows the effect turbulence characterized by the average Reynolds number on \( \bar{W}{\text{ and }}\varphi_{ 0} \) as a function of lm. It is observed that for all values of lm, the load carrying capacity and attitude angle increase with an increase in Re, and this effect is more pronounced at lower range of lm. Also, the values of \( \bar{W} \) gradually decreases with an increase in lm and attains a steady value as lm → ∞. This increase in \( \bar{W} \) is due to the enhancement of film pressure with increase in Re, whereas, the attitude angle does not vary significantly with lm.

Variation of \( \bar{W} \) and \( \phi_{0} \) with lm for different values of Re
4.4 Misalignment moment
Variation of misalignment moment, \( \bar{M} \) with respect to lm, is presented in Figs. 8 and 9 for different values of Dm and Re, respectively. The results show similar variation of misalignment moment as observed in case of load carrying capacity. This is because of the dependence of misalignment moment on film pressure only.

Variation of \( \bar{M} \) with lm for different values of Dm

Variation of \( \bar{M} \) with lm for different values of Re
4.5 End flow rate
Variation of end flow rate, \( \bar{Q}_{z} \) with respect to lm, is presented in Fig. 10 for various values of Dm. It can be noted that the effect of misalignment is to increase the end flow rate. Also, the characteristic length of micropolar fluid has negligible effect on end leakage flow when all other parameters are unchanged.

Variation of \( \bar{Q}_{z} \) with lm for different values of Dm
It can be noted from the expressions that increase in Reynolds number results in increase in the value of turbulent shear coefficients and consequently decreasing the value of micropolar fluid functions. Also as the end flow rate depends on the micropolar function, the value of the end flow rate decreases with increase in Re. This phenomenon has been shown in Fig. 11.

Variation of \( \bar{Q}_{z} \) with lm for different values of Re
4.6 Frictional parameter
The frictional parameter, f(R/C) is plotted as a function of lm for various degrees of misalignment and presented in Fig. 12. It is observed that the effect of misalignment is to increase f(R/C) for all values of lm. Further, f(R/C) increases with increase in lm, indicating that the frictional parameter is maximum for the Newtonian fluids.

Variation of f(R/C) with lm for different values of Dm
Figure 13 shows the effect of Re on f(R/C) as a function of lm. The results reveal that in general, the frictional parameter increases with lm for a particular value of Re. The effect of Re is to reduce the frictional parameter up to around lm = 25. Similar observations have been reported by Shenoy et al. [15] for non-Newtonian couple stress fluid. However, the trend gets reversed beyond lm = 25, where the fluid gradually transforms to Newtonian fluid. The value of frictional parameter is found to be the lowest for laminar flow conditions at higher values of lm(> 15).

Variation of f(R/C) with lm for different values of Re
5 Conclusions
From the above parametric analysis of turbulence, the following conclusions can be drawn:
-
1.
For a misaligned journal bearing lubricated with micropolar fluid, the effect of turbulence is to increase film pressure, load carrying capacity, attitude angle and misalignment moment.
-
2.
Turbulence reduces the end flow rate of misaligned journal bearings.
-
3.
In turbulent flow regime, the frictional parameter is found to reduce with increase in Reynolds number at lower values of lm, i.e., when the effect of micropolarity is high.
-
4.
The effect of the degree of misalignment is to decrease the load carrying capacity and misalignment moment at lower misalignment. But when the misalignment is large, this trend gets reversed.
-
5.
The effect of misalignment is to increase the end leakage flow and friction factor.
Abbreviations
- C :
-
Radial clearance, m
- C z :
-
Constant parameter of turbulent shear coefficient for axial flow
- D :
-
Journal diameter, m
- D m :
-
Degree of misalignment, \( D_{m} = {{\xi_{e} } \mathord{\left/ {\vphantom {{\xi_{e} } {\xi_{m} }}} \right. \kern-0pt} {\xi_{m} }} \)
- e 0,ɛ 0 :
-
Steady-state eccentricity ratio at the mid plane of the bearing, \( \varepsilon_{0} = {{e_{0} } \mathord{\left/ {\vphantom {{e_{0} } C}} \right. \kern-0pt} C} \)
- e′, ɛ′:
-
Magnitude of projection of the axis of misaligned journal onto the mid plane of the bearing, \( \varepsilon^{\prime } = {{e^{\prime } } \mathord{\left/ {\vphantom {{e^{\prime } } C}} \right. \kern-0pt} C} \)
- \( e_{\hbox{max} }^{\prime } ,\varepsilon_{\hbox{max} }^{\prime } \) :
-
Maximum possible value of e′ and ε′ respectively, \( \varepsilon_{\hbox{max} }^{\prime } = e_{\hbox{max} }^{\prime } /C \)
- f(R/C):
-
Frictional parameter, \( f(R/C) = {{\overline{F} } \mathord{\left/ {\vphantom {{\overline{F} } {\overline{W} }}} \right. \kern-0pt} {\overline{W} }} \)
- F :
-
Frictional force, N
- \( \overline{F} \) :
-
Non-dimensional frictional force, \( \overline{F} = {{FC^{2} } \mathord{\left/ {\vphantom {{FC^{2} } {\mu\Omega ^{2} R^{3} L}}} \right. \kern-0pt} {\mu\Omega ^{2} R^{3} L}} \)
- h, \( \overline{h} \) :
-
Film thickness, \( \overline{h} = {h \mathord{\left/ {\vphantom {h C}} \right. \kern-0pt} C} \)
- h cav, \( \bar{h}_{\text{cav}} \) :
-
Film thickness at the point of cavitation, \( \bar{h}_{\text{cav}} = {{h_{\text{cav}} } \mathord{\left/ {\vphantom {{h_{\text{cav}} } C}} \right. \kern-0pt} C} \)
- \( k_{\theta } , { }k_{{\bar{z}}} \) :
-
Turbulent shear coefficients in circumferential and axial directions, respectively
- l m :
-
Non-dimensional characteristics length of micropolar fluid, lm = C/Λ
- L :
-
Bearing length, m
- M, \( \overline{M} \) :
-
Resultant misalignment moment, \( \overline{M} = {{MC^{3} } \mathord{\left/ {\vphantom {{MC^{3} } {\mu R^{3} L}}} \right. \kern-0pt} {\mu R^{3} L}} \)
- M i, \( \overline{M}_{i} \) :
-
Misalignment moment, \( \overline{M}_{i} = {{M_{i} C^{3} } \mathord{\left/ {\vphantom {{M_{i} C^{3} } {\mu R^{3} L}}} \right. \kern-0pt} {\mu R^{3} L}} \), i = r- and \( \phi \)- for radial and transverse directions, respectively
- N :
-
Coupling number
- p, \( \bar{p} \) :
-
Steady-state film pressure in the film region, \( \bar{p} = {{pC^{2} } \mathord{\left/ {\vphantom {{pC^{2} } {\mu\Omega R^{2} }}} \right. \kern-0pt} {\mu\Omega R^{2} }} \)
- Q i, \( \bar{Q}_{i} \) :
-
Steady-state end flow rate, \( \bar{Q}_{i} = {{Q_{i} L} \mathord{\left/ {\vphantom {{Q_{i} L} {C\Omega R^{3} }}} \right. \kern-0pt} {C\Omega R^{3} }} \), i = Rear end, front end and z
- R :
-
Radius of the journal, m
- \( Re \) :
-
Mean or average Reynolds number defined by radial clearance, C,\( Re = {{\rho\Omega RC} \mathord{\left/ {\vphantom {{\rho\Omega RC} \mu }} \right. \kern-0pt} \mu } \)
- U :
-
Velocity of journal, U = ΩR, m/s
- W, \( \bar{W} \) :
-
Steady-state load in bearing, \( \bar{W} = {{WC^{2} } \mathord{\left/ {\vphantom {{WC^{2} } {\mu\Omega ^{2} R^{3} L}}} \right. \kern-0pt} {\mu\Omega ^{2} R^{3} L}} \)
- W i, \( \bar{W}_{i} \) :
-
Steady-state load in bearing, \( \bar{W}_{i} = {{W_{i} C^{2} } \mathord{\left/ {\vphantom {{W_{i} C^{2} } {\mu\Omega ^{2} R^{3} L}}} \right. \kern-0pt} {\mu\Omega ^{2} R^{3} L}} \), i = r- and \( \phi \)- for radial and transverse directions respectively
- x :
-
Cartesian coordinate axis in the circumferential direction, x = Rθ, m
- z, \( \bar{z} \) :
-
Cartesian coordinate axis along the bearing axis, \( \bar{z} \, = \, {{ 2z} \mathord{\left/ {\vphantom {{ 2z} L}} \right. \kern-0pt} L} \)
- β m :
-
Misalignment Angle
- \( \phi_{0} \) :
-
Steady-state attitude angle, rad
- \( \Phi _{{\theta ,\bar{z}}} \) :
-
Non-dimensional micropolar fluid functions along circumferential and axial directions
- Ω:
-
Angular velocity of journal, rad/s
- θ :
-
Circumferential coordinate, rad
- ξ e :
-
Misalignment ratio at either bearing ends, ξe = βmL/2C
- ξ m :
-
Maximum possible value of ξe
- ψ :
-
Angle between the projection of the journal rear centre line onto the mid plane of the bearing and the eccentricity vector
References
Constantinescu VN (1962) Analysis of bearings operating in turbulent regime. ASME J Basic Eng 84:139–151
Constantinescu VN, Galetuse S (1965) On the determination of friction forces in turbulent lubrication. ASLE Trans 8:367–380
Ng CW, Pan CHT (1965) A linearized turbulent lubrication theory. ASME J Basic Eng 87:675–688
Taylor CM, Dawson D (1974) Turbulent lubrication theory- application to design. ASME J Lubr Technol 96:36–46
Eringen A (1966) Theory of micropolar fluids. J Math Mech 16:1–18
Allen S, Kline K (1971) Lubrication theory of micropolar fluids. J Appl Mech 38:646–650
Prakash J, Sinha P (1975) Lubrication theory of micropolar fluids and its application to a journal bearing. Int J Eng Sci 13:217–232
Sukhla JB, Isa M (1975) Generalised Reynolds equation for micropolar lubricants and its application to optimum one-dimensional slider bearings; effects of solid particle additives in solution. J Mech Eng Sci 17:280–284
Zaheeruddin Kh, Isa M (1978) Micropolar fluid lubrication of one-dimensional journal bearings. Wear 50:211–220
Tipei N (1979) Lubrication with micropolar fluids and its application to short bearings. ASME J Lubr Technol 101:356–363
Khonsari MM, Brewe DE (1989) On the performance of finite journal bearing lubricated with micropolar fluid. Tribol Trans 32:155–160
Safar ZS, El-Kotb MM, Mokhtar DM (1989) Analysis of misaligned journal bearing operating in turbulent regime. ASME J Tribol 111:215–219
Osman TA (2001) Misalignment effect on the static characteristics of magnetized journal bearing lubricated with ferrofluid. Tribol Lett 11:195–203
Das S, Guha SK, Chattopadhyay AK (2002) On the steady-state performance of misaligned hydrodynamic journal bearings lubricated with micropolar fluids. Tribol Int 35:246–255
Shenoy BS, Pai R (2011) Effect of turbulence on the static performance of a misaligned externally adjustable fluid film bearing lubricated with coupled stress fluids. Tribol Int 44:1774–1781
Sun J, Zhu X, Zhang L, Wang X, Wang C, Wang H, Zhao X (2014) Effect of surface roughness, viscosity-pressure relationship and elastic deformation on lubrication performance of misaligned journal bearings. Ind Lubr Tribol 66:337–345
Xu G, Zhou J, Geng H, Lu M, Yang L, Yu L (2015) Research on the static and dynamic characteristics of misaligned journal bearing considering the turbulent and thermohydrodynamic effects. J Tribol. https://doi.org/10.1115/1.4029333
Nikolakopoulos PG, Papadopoulos CA (2008) A study of friction in worn misaligned journal bearings under severe hydrodynamic lubrication. Tribol Int 41:461–472
Zhang X, Yin Z, Jiang D, Gao G, Wang Y, Wang X (2016) Load carrying capacity of misaligned hydrodynamic water-lubricated plain journal bearings with rigid bush materials. Tribol Int. https://doi.org/10.1016/j.triboint.2016.02.038
Lv F, Ta N, Rao Z (2017) Analysis of equivalent supporting point location and carrying capacity of misaligned journal bearing. Tribol Int. https://doi.org/10.1016/j.triboint.2017.06.034
Faralli M, Belfiore NP (2006) Steady-state analysis of worn spherical bearing operating in turbulent regime with non-Newtonian lubricants. In: International conference on tribology, AITC–AIT, Parma, Italy
Das S, Guha SK (2013) On the steady-state performance characteristics of finite hydrodynamic journal bearing under micropolar lubrication with turbulent effect. Int J Mech Ind Sci Eng 7:65–73
Elsharkawy AA (2004) Effects of misalignment on the performance of finite journal bearings lubricated with couple stress fluids. Int J Comput Appl Technol 21:137–146
Acknowledgement
The authors are grateful to Mechanical Engineering Department of Indian Institute of Science and Technology, Shibpur for the continuous encouragement and cooperation in executing this work.
Author information
Authors and Affiliations
Corresponding author
Additional information
Technical Editor: Cezar Negrao, PhD.
Rights and permissions
About this article

Cite this article
Das, S., Guha, S.K. Numerical analysis of steady-state performance of misaligned journal bearings with turbulent effect. J Braz. Soc. Mech. Sci. Eng. 41, 81 (2019). https://doi.org/10.1007/s40430-019-1583-4
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s40430-019-1583-4