
Abstract
This paper proposes the alternating direction implicit (ADI) numerical approaches for computing the solution of multi-dimensional distributed-order fractional integrodifferential problems. The proposed method discretizes the unknown solution in two stages. First, the Riemann–Liouville fractional integral term and the distributed-order time-fractional derivative are discretized with the help of the second-order convolution quadrature and the weighted and shifted Grünwald formula, respectively. Second, the spatial discretization is obtained by the general centered finite difference (FD) technique. At the same time, the ADI algorithms are devised for reducing the computational burden. Additionally, the convergence analysis of proposed ADI FD schemes is analyzed in detail through the energy method. Finally, two numerical examples highlight the accuracy of the proposed method and verify the theoretical formulations.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
This paper considers the distributed-order fractional integrodifferential equation in two/three dimensions
The initial condition and the boundary condition (IC and BC, respectively) are prescribed as
and the distributed-order integral is defined as
Following Podlubny (1999), the Caputo fractional derivative (CFD) and the Riemann–Liouville fractional integral (RLFI) are respectively defined in
and
in which \(\omega (\alpha )\ge 0\) with \(\int \nolimits _{0}^{1}\omega (\alpha )\mathrm{d}\alpha =c_0>0\), \(\varOmega =\mathbb {R}^2\) or \(\mathbb {R}^3\), \(\varGamma (\vartheta )\) = \(\int \nolimits _{0}^{+\infty }\) \(\xi ^{\vartheta -1}\) \(\exp {(-\xi )}\mathrm{d}\xi \) and \(f({\textbf {x}},t)\) represent the weight function, spatial domain, the Euler’s Gamma function, and forcing term, respectively. Without loss of generality, we can take a zero initial value \(u({\textbf {x}},0)\). If \(u({\textbf {x}},0) = \varpi ({\textbf {x}})\), then we can consider a transform \(w({\textbf {x}},t)=u({\textbf {x}},t)-\varpi ({\textbf {x}})\). Theory of fractional calculus (FC) generalizes the integer order derivative to arbitrary order, which can be achieved in space and time with a power law memory kernel of the nonlocal problems (Tarasov 2021a, b; Kumar and Saha Ray 2021; Behera and Ray 2022; Moghaddam et al. 2019; Abdelkawy et al. 2022; Lopes and Machado 2021). With the increasing popularity of FC, fractional differential equations (FDEs) have become an important key for describing and modeling various phenomena phenomena in scopes of engineering and sciences (Podlubny 1999; Hilfer 2000; Akram et al. 2021; Alia et al. 2021). Nakhushev (1998, 2003) discussed the importance of studies on the positivity of continuous and discrete differentiation and integration operators in the theory of mixed type equations and FC and proposed that fractional integrals (FIs) of uniformly distributed order can be expressed in terms of the so-called continual FIs. Then, Pskhu (2004, 2005) suggested the fractional operators which are the opposite of the continual FIs and presented the theory about the continual integro-differentiation operator. Their research has had a significant impact on the study of FC. Furthermore, many scholars have proposed different numerical methods for solving FDEs, including finite difference (FD) (Qiu et al. 2019; Yn et al. 2011), finite element (FE) (Liu et al. 2015), two-grid methods (Liu et al. 2015; Qiu et al. 2020, mehless method (Nikan et al. 2021b, a; Nikan and Avazzadeh 2021) and etc. In recent decades, distributed-order partial differential equations (DOPDEs) have a wide range of applications in mathematical physics and engineering (Bagley and Torvik 2000; Caputo 2001), and can be used to describe the dynamics of anomalous diffusion and relaxation phenomena. Distributed order derivatives are fractional derivatives that have integrated the order of the derivative over a certain range. On the one hand, the distributed order fractional problem can be extended to a general integer order problem. On the other hand, the distributed order problem can be discretized into a multi-term time fractional order problem. In the past few years, more and more researchers have studied distributed-order differential equations. Naber (2004) obtained the solution for the fractional subdiffusion equations with the distributed-order by means of Laplace transform and variable separation. Kochubei (2008) studied the distributed order derivative and integral. Atanackovic et al. (2009) investigated the Cauchy problem of the time distributed-order diffusion wave problem. Meerschaert et al. (2011) analyzed explicit strong and random analogs solutions. Katsikadelis (2014) adopted a new numerical approach to approximate distributed order FDEs of a general formulation in an integration domain. Morgado and Rebelo (2015) explored an implicit approach for solution of the distributed-order time-fractional nonlinear reaction-diffusion problem. Chen et al. (2016) studied the spectral scheme and pseudo-spectral scheme in a domain of semi-infinite space. Du et al. (2016) analyzed and proposed the higher-order FD techniques having smooth solutions in 1D and 2D spaces. Jin et al. (2016) developed two fully discrete approaches including error analysis to discretize the distributed-order time fractional diffusion problem including nonsmooth initial of data. Abbaszadeh and Dehghan (2017) subsequently presented an improved meshfree technique with error estimation. Gao et al. (2017) developed an interpolation-based approximation for the temporal second order difference scheme to approximate multi-term distributed order time FDEs. Yang et al. (2018) formulated an orthogonal spline collocation (OSC) technique. Qiu et al. (2020) advanced the Galerkin FE technique for the time fractional mobile-immobile model with the distributed-order. Gao et al. (2020) investigated the nonhomogeneous 2D distributed-order time-fractional cable equations by unstructured grids of Galerkin FE. Zhang et al. (2022) presented an ADI Legendre–Laguerre spectral scheme for the 2D time distributed-order diffusion-wave problem on a semi-infinite domain. Jian et al. (2021) established fast numerical algorithms to solve the Riesz space fractional diffusion-wave problem with time distributed-order.
It is well known that the ADI methods have the advantage of reducing the computational burden using decomposing a multidimensional problem into several independent one-dimensional problems Huang et al. (2021). Some fractional order problems have been studied so far by the ADI methods. Chen et al. (2016) and Qiao et al. (2021) proposed the ADI FD technique for fractional order Volterra equation and the 3D nonlocal evolution equation. Pani et al. (2010) implemented ADI OSC method for the single-order time FDEs. Gao and Zz (2016b, 2016a) adopted the ADI FD approach to the distributed-order time-diffusion equations, while Li et al. (2013) used the ADI FE scheme for the investigation of single-order temporal/spatial FDEs. However, the problem (1)–(3) in two/three dimensions has not been studied. In the following, we will discuss and analyze this issue.
For large problems, the ADI method can reduce the storage requirements and computational complexities. In addition, although the implicit method has good stability, it requires a large amount of CPU run time if the number of unknowns is large. Therefore, we construct an ADI FD scheme, which deals with two- and three-dimensional problems by solving a series of smaller, independent one-dimensional problems. The main objective of current work is to develop the efficient ADI numerical approaches for distributed-order integrodifferential equations for the case of two/three dimensions. The time discretization is obtained based on the second-order CQ rule and the weighted and shifted Grünwald formula for the RLFI and the distributed-order time-fractional derivative, respectively. Then, we adopt the central FD technique to establish the fully discrete scheme. Meanwhile, the fully-discrete ADI difference approaches in two/three dimensions are obtained with corresponding ADI algorithms. The numerical results show that our schemes in two/three dimensional cases are convergent, with time convergence of order 2, spatial convergence of order 2, and distributed-order convergence of order 2, respectively.
This paper includes five sections as follows. Section 2 gives the necessary notations, some useful lemmas and derivation of ADI difference approaches and performs the convergence analysis of the two-dimensional distributed order problem. Section 3 constructs the ADI approach of the three-dimensional problem by adding a tiny term, and studies the convergence analysis of the ADI approach by means of the energy method. Section 4 presents two test problems to confirm the theoretical prediction and show effectiveness of the method. Finally, Section 5 summarizes the main concluding remarks.
2 Numerical description and theoretical analysis for the two-dimensional case
2.1 Preliminary
In the following numerical method analysis, we assume that two-dimensional problems (1)–(3) have a sufficiently smooth and unique solution on the domain \(\varOmega \) = \((0, L_1)\times (0, L_2)\) and its boundary \(\partial \varOmega \). We will give some useful symbols and significant lemmas, which can help us in the subsequent discussions. First of all, let us define the necessary notations of time and distributed order. For convenience, we consider a temporal step size which is selected as the nodes \(\tau =\frac{T}{N}\) and \(t_n = n\tau \), \(0 \le n \le N\), where N and T are the total number of time steps and a finite time, respectively. For positive integers N and J, we separate [0, 1] into 2J-subintervals \(\alpha _l = l\triangle \alpha , ~~0\le l \le 2J\), so that distributed-order step size \(\triangle \alpha =\frac{1}{2J}\cdot \) For \(n=1,2,\ldots ,N\), let us introduce \(\delta _tv^{n-\frac{1}{2}} = \frac{1}{\tau }(v^{n}-v^{n-1})\cdot \) In what follows, we mention the composite trapezoid formulation for discretizing the distributed-order integral.
Lemma 1
(Gao and Zz 2016b) For \(\sigma (\alpha ) \in C^2[0,1]\), we have
in which
Next, we describe the process of discretization for the distributed-order CFD. Now, let us introduce
where \(\hat{\varphi }(\xi )=\mathcal {F}[\varphi ](\xi )=\int \nolimits _{-\infty }^{+\infty }e^{i\xi t}\varphi (t)\mathrm{d}t\) illustrates the Fourier transformation for the function \(\varphi (t)\).
Lemma 2
(Pskhu 2004; Meerschaert and Tadjeran 2004) For \(\varphi \in \Im ^{\alpha +1}(\mathbb {R})\), the RL fractional derivative can be stated as
and
in which \(g_{k}^{(\alpha )} = (-1)^k\left( {\begin{array}{c}\alpha \\ k\end{array}}\right) \) are the coefficients for \(\alpha \in (0,1]\) and m is an integer. Then, we have
uniformly satisfies in \(t\in \mathbb {R}\) when \(\tau \rightarrow 0\).
Furthermore, in the case of \(0<\alpha \le 1\), the coefficients \(g_{k}^{(\alpha )}\) introduced in (8) satisfy the following properties
For carrying out a theoretical analysis, we require the following lemma.
Lemma 3
(Tian et al. 2015) Assume that \(\varphi \in \Im ^{\alpha +2}(\mathbb {R})\). Then, we have
uniformly holds for \(t\in \mathbb {R}\) when \(\tau \rightarrow 0\), and the coefficients \(\lambda _{k}^{(\alpha )}\) can be evaluated as follows
Actually, it can be checked for \(0\le \alpha \le 1\) that
From Wang and Vong (2014a), we can obtain the following non-negative properties.
Lemma 4
(Wang and Vong 2014a) Let the coefficients \(\big \{\lambda _{k}^{(\alpha )}\big \}^{\infty }_{k=0}\) are introduced in (10). For any mesh series \(\big ({\mathcal {W}}^1,\ldots ,{\mathcal {W}}^m\big )^\mathrm{T}\in \mathbb {R}^{m}\), we have
According to the aforesaid lemma, we can conclude the lemma as follows.
Lemma 5
(Gao and Zz 2016a, b) Assume that the coefficients\(\big \{\lambda _{k}^{(\alpha )}\big \}^{\infty }_{k=0}\) are introduced in Eq. (10). Then, for any mesh series \(\big ({\mathcal {W}}^0,\ldots ,{\mathcal {W}}^m\big )^\mathrm{T}\in \mathbb {R}^{m+1}\), it follows that
Afterwards, we define the following notation
Then, we get the estimate as follows.
Lemma 6
(Gao and Zz 2016b) Let \(\mu _1\) be defined in the relation (11). Then, we get \(\mu _1 = \mathcal {O}\Big ((\tau |\ln \tau |)^{-1}\Big )\).
Secondly, we take two positive integers \(M_1\) and \(M_2\). Let \(h_1\) = \(L_1\)/\(M_1\), \(h_2\) = \(L_2\)/\(M_2\), \(h=\max \{h_1, h_2\}\). Define the nodal points \(x_i\) = \(ih_1\), \(0\le i \le M_1\), \(y_j\) = \(jh_2\), \(0\le j \le M_2\), \(\chi = \{1\le i \le M_1-1, 1\le j \le M_2-1\} \), \(\gamma \) = {\((i,j)|(x_i,y_j)\in \partial \varOmega \)}. Also, we introduce \({\overline{\varOmega }_h}\) = {(\(x_i\),\(y_j\))| \(0 \le i \le M_1, 0 \le j \le M_2\)}, \(\mathring{\varOmega }_h\) = {\(w| w\in \varOmega _h; w_{ij} = 0, {~\mathrm{when}~} (i,j)\in \gamma \)}, \(\varOmega _h\) = \({\overline{\varOmega }_h}\) \(\cap \) \(\varOmega \) and \(\partial \varOmega _h\) = \(\varOmega _h\) \(\cap \) \(\partial \varOmega \).
In order to facilitate the analysis, suppose that the symbols \(u^{n}_{ij}\) and \(f^{n}_{ij}\) represent the values of functions u(x, y, t) and f(x, y, t) at nodal point \((x_i, y_j, t_n)\), respectively. We define some necessary notations for any grid function w = {\(w_{ij} | 0 \le i \le M_1, 0 \le j \le M_2\)} over \({\overline{\varOmega }_h}\),
Let us define the discrete inner product and the associated norms for \(w,v\in \mathring{\varOmega }_h\) by
Here, we present the associated discrete method and some lemmas to construct the ADI difference approach. First, we introduce the second-order CQ strategy (cf. Lubich 1986, 1988) for discretizing the RLFI \(I^{(\beta )}\phi (t_n)\) as
where the CQ weights \(\omega _s^{(\beta )}\) can be derived by
in which \(\delta (\nu )\) denotes the generating function Lubich (1988). For the CQ with second-order accuracy, we get
Therefore, we can get the quadrature weights \(\omega ^{(\beta )}_s\) via
We can present the correction weights \(\tilde{\omega }{_n^{(\beta )}}\) introduced in (12) for discretizing the integral term with second-order accuracy in the time dimension. When \(\phi = 1\), we have
Thus, we arrive at
Now, we analyze the quadrature error.
Lemma 7
(Chen et al. 2016; Xu 1997) Suppose that the function \(\psi (t)\) is continuously differentiable over (0, T] and real, \(\psi _{tt}(t)\) is integrable and continuous on (0, T]. Then, the quadrature error can be obtained using
in which \(Q^{(\beta )}_n(\psi )\) is presented by (12), and \(0<t_n<T<\infty \).
Remark 1
Throughout the article, C represents a generic positive constant which is independent of the space and time step sizes. In addition, it is not necessarily same in different occurrences.
Remark 2
Through the above-mentioned Lemma, the quadrature error of the CQ is \(\mathcal {O}({\tau ^{1+\beta }})\). However, the quadrature error of second-order CQ is \(\mathcal {O}({\tau ^2})\) when \(|\psi _{tt}(t)|\le C\), \(t \in [0, T]\).
In the following, we list some useful lemmas based on the Taylor formula with integral remainder.
Lemma 8
(Yn et al. 2011) Supposing that \(u(x,y,\cdot )\in C^{4,4}_{x,y}\big ([0, L_1]\times [0, L_2]\big )\). Then, we get
Now, we can obtain the bound of \(I^{(\beta )}u_{xx}(x_i,y_j,t_n)-Q_n^{(\beta )}(\delta _x^2U_{ij})\).
Lemma 9
Assume that \(u(x,y,t)\in C^{4,4,2}_{x,y,t}\big ([0, L_1]\times [0, L_2]\times [0,T]\big )\). Then, for \(n=1, \ldots , N\) and \((i, j)\in \chi \), we get
Proof
Using the triangle inequality, we have
In other hand, for the estimate of \(\big |Q_n^{(\beta )}\big (u_{xx}(x_i,y_j,\cdot )\big )-Q_n^{(\beta )}(\delta _x^2U_{ij})\big |\), we use Lemma 8 and (formula (2.4), Qiao et al. 2022) to get
Regarding Lemma 7 and Remark 2, we get
In the same way, we can prove \(\big |I^{(\beta )}u_{yy}(x_i,y_j,t_n)-Q_n^{(\beta )}(\delta _y^2U_{ij})\big |\le C(\tau ^2 + h_2^2)\). To sum up, the proof is completed. \(\square \)
2.2 The derivation of the ADI difference approach in two dimensions
Firstly, we can establish the ADI difference approach for Eqs. (1)–(3). Considering Eq. (1) at the nodal point \((x_i,y_j,t_n)\) for \((i, j)\in \chi \), \(n=1, \ldots , N\), we have
From Lemma 1, we can get
Observing the equivalence of the CFD \(D_{t}^{\alpha }\varphi (t)\) and the RLFD \(_{-\infty }D_{t}^{\alpha }\varphi (t)\) with \(\varphi (t)=0\) at \(t\le 0\) and employing Lemma 3 as well as the above formula, we can obtain
Inserting relations (14), (15), (18) and (19) in (17) yields that
in which
Then adding the small term \(\tau \mu _1\mu _2^2\delta _x^2\delta _y^2\delta _tu_{ij}^{n-\frac{1}{2}} = (R_2)_{ij}^n\) to both sides of Eq. (20), we can get
in which
from which, if \(u\in C_{x,y,t}^{4,4,2}\big ([0,L_1]\times [0,L_2]\times [0,T]\big )\) with \(\tau \mu _1\mu _2^2=\mathcal {O}(\tau ^2|\ln \tau |)\), then \(|(R_2)_{ij}^n|\le C\tau ^2\). Noting the IC and BC in (2)–(3), we obtain
Ignoring the truncation error \(R_{ij}^n \) and using the substitution of \(U_{ij}^n\) instead of \(u_{ij}^n\) in Eqs. (22)–(23), we can provide the ADI difference approach for Eqs. (1)–(3) as
Let us introduce \(\mu _2 = \mu _1^{-1}(\mu +\tau ^\beta \omega _0^{(\beta )})\), where \(\mu _1\) is defined in (11). It is not hard to get that \(\mu _2 = \mathcal {O}(\tau |\ln \tau |)\). At the same time, we notice that (24) can be restated as
where
Denoting the notation \(E^n = U^n-U^{n-1}\), after simplification, we can obtain the following ADI scheme
where \({\mathcal {I}}\) is an identity operator, \(\tilde{\mathcal {F}}_{ij}^n\) is given as follows
Solving two sets of independent 1D problem, we can determine \({U_{ij}^n}\). Let us define
Therefore, we give the following computational steps:
\(\mathbf {Step~{1}}\) Firstly, for fixed \(j\in \{1, 2, \ldots , M_2-1\}\) we solve the following system to calculate \(\{E_{ij}^{n-\frac{1}{2}}\}\):
\(\mathbf {Step~{2}}\) Once \(\{E_{ij}^{n-\frac{1}{2}}\}\) is available, fixed \(i\in \{1, 2, \ldots , M_1-1\}\), we can solve the system as follows:
to compute \(\{E_{ij}^n\}\), and we can get the desired solution \(\{U_{ij}^n\}\) further.
2.3 Analysis of the ADI difference approach
This subsection only examines the convergence analysis of the proposed algorithm (24)–(25). In what follows, we introduce some useful lemmas.
Lemma 10
(Xu 1997) For \(t\in \{t\in \mathbb C, \mathbf {Re}(t)>0\}\), \(\beta (t)\in L^{1,loc}(0,\infty )\) denote a positive value if and only if \(\mathbf {Re}\big (\hat{\beta }(t)\big )\ge 0\), in which \(\hat{\beta }(\xi ) = \int \nolimits _{-\infty }^{+\infty }e^{i\xi t}\beta (t)\mathrm{d}t\) indicates the Laplace transform of \(\beta (t)\) introduced in (6), and \(\mathbf {Re}(\cdot )\) represents the real part.
Lemma 11
(Lopez-Marcos 1990; Xu 1997) Suppose that a real-valued sequence \(\{a_0, a_1, \ldots , a_s, \ldots \}\) satisfies: for any vector \((L^1, L^2, \ldots , L^N)\in \mathbb R^N,\) positive integer N, and \(\,\hat{a}(z) = \sum \nolimits _{s=0}^{\infty }a_sz^s\) is analytic in \({\mathcal {S}} = \{z\in \mathbb C: |z|\le 1\}\), for \(z \in {\mathcal {S}} \), it follows that
if and only if \( \mathbf {Re}\big (\hat{a}(z)\big )\ge 0 \).
Lemma 12
(Chen et al. 2016; Lopez-Marcos 1990) The functions \(w, v\in \mathring{\varOmega }_h\) have the following properties:
In the same way, we can denote the notation \((\delta _y^2w, v)\) and so on.
Define
Subtracting (24)–(25) from (22)–(23), respectively, and denoting the notation \(\triangle \alpha \sum \nolimits _{l=0}^{2J}c_{l}\omega (\alpha _l)\tau ^{-\alpha _l} = \varPhi _{l,J}\), we can compute the error system of equations as follows
Theorem 1
(Convergence). Suppose that \(\{u^n\}_{n=0}^{N}\) and \(\{U^n\}_{n=0}^{N}\) are the solutions of (1)–(3) and (24)–(25), respectively. Let \(u(x,y,t)\in C^{4,4,2}_{x,y,t}\big ([0, L_1]\times [0, L_2]\times [0,T]\big )\). Then, we obtain
Proof
We establish the following weak formulation by taking the inner product of (30) by \(\tau e^n\), summing from \(n=1\) to N, adding small term \(\tau \mu _1(e^0, e^0)\) to the both sides of (30) and denoting \(\tilde{\varepsilon } = \tau \mu _1\) as
Each term in (32) will be analyzed below. Firstly, based on the Lemma 5, we have
Secondly, we can get
Thirdly, from Lemmas 10–12, we get
Fourthly, applying Lemma 12 (i), we arrive at
Moreover, we have
Finally, employing the Cauchy–Schwarz inequality arrives at
Inserting (33)–(38) in (32), we have
Next, using the Young inequality \(ab\le \varepsilon a^2+\frac{1}{4\varepsilon }b^2 (a,b\in \mathbb R,\varepsilon >0)\) and Poincaré inequality \(\Vert e^n\Vert \le C_0\Vert \nabla e^n\Vert \) to get
Then, because of \(e^0 = 0\), we have
Finally, we obtain the convergence results as
This completes the proof \(\square \)
3 Numerical method and error analysis for the three-dimensional case
This section presents the numerical scheme and analysis of the three-dimensional problem (1)–(3) with \(\varOmega = (0,L_1)\times (0,L_2)\times (0,L_3)\). Except for special definitions, other signs are the same as the two-dimensional case.
3.1 The derivation of the ADI difference scheme in three dimensions
Let \(h_1 = \frac{L_1}{M_1}, h_2 = \frac{L_2}{M_2}, h_3 = \frac{L_3}{M_3}, h = \max \{h_1,h_2,h_3\}\), where \(M_1, M_2, M_3\) are the number of divisions in the x, y and z dimensions, respectively. The nodal points \(x_i=ih_1, y_j=jh_2, z_m=mh_3, \varrho =\{1\le i\le M_1-1, 1\le j\le M_2-1, 1\le m\le M_3-1\}, \iota =\{(i,j,m)|(x_i,y_j,z_m)\in \partial \varOmega \}, \overline{\varOmega }_h=\{(x_i,y_j,z_m)|0\le i\le M_1, 0\le j\le M_2, 0\le m\le M_3\}, \mathring{\varOmega }=\{w|w\in \varOmega _h, w_{ijm}=0, when (i,j,m) \in \iota \}, \varOmega _h= \overline{\varOmega }_h \cap \varOmega \) and \(\partial \varOmega _h=\varOmega _h\cap \partial \varOmega \). Let us introduce the following grid functions
For any grid function \(w= \{w_{ijm}|0\le i\le M_1, 0\le j\le M_2, 0\le m\le M_3\}\) over \(\overline{\varOmega }_h\), we define
In like manner, we define other symbols, e.g., \(\delta _yw_{ijm}^n, \delta _zw_{ijm}^n, \delta _y^2w_{ijm}^n, \delta _z^2w_{ijm}^n, \) etc.
In addition, for grid functions \(w= \{w_{ijm}|0\le i\le M_1, 0\le j\le M_2, 0\le m\le M_3\}\) and \(v= \{v_{ijm}|0\le i\le M_1, 0\le j\le M_2, 0\le m\le M_3\}\), let us introduce the inner product and norms as
We obtain the following expression by considering (1) at the nodal point \((x_i, y_j, z_m, t_n)\) for \((i, j ,m)\in \varrho , n=1, \ldots , N\), as
Similarly to what was considered in Sect. 2, from Lemmas 1 and 3, we can obtain
Meanwhile, in virtue of Lemmas 8 and 9, we have
Bring (44)–(45) into (43) and according to Lemma 8, we can get
where
Adding the small term \(\mathcal LU_{ijm}^{n-\frac{1}{2}}=\tau \mu _1\mu _2^2(\delta _x^2\delta _y^2+\delta _x^2\delta _z^2+\delta _y^2\delta _z^2)\delta _tU_{ijm}^{n-\frac{1}{2}}-\tau \mu _1\mu _3^3\delta _x^2\delta _y^2\delta _z^2\delta _tU_{ijm}^{n-\frac{1}{2}}=(R_4)_{ijm}^n\) to both sides of (46), we can get
where
with the IC and BC as follow
Dropping the truncation errors \((\hat{R})_{ijm}^n\), with \(U_{ijm}^n\) instead of \(u_{ijm}^n\) in (47)–(48), we obtain the difference scheme as follow
This moment, by observing that (49) can rewritten as
in which
Let the notation \(E^n\) is defined in front. After simplification, we get the following ADI difference scheme
where \({\mathcal {I}}\) is an identity operator, and \(\hat{\mathcal {F}}_{ijm}^n\) is presented as follows
Next, we present several intermediate variables to determine at \(U_{ijm}^n\):
and
From the above formulae, we can calculate the \(E_{ijm}^n\) through the following three steps.
\(\mathbf {Step~{1}}\) Firstly, solve the following system to compute \(\{E_{ijm}^{n-\frac{2}{3}}\}\) in the x-dimension by fixing \(m\in \{1, 2, \ldots , M_3-1\}\) and \(j\in \{1, 2, \ldots , M_2-1\}\) as
\(\mathbf {Step~{2}}\) Solve the following system in the y-dimension by fixing \(m\in \{1, 2, \ldots , M_3-1\}\) and \(i\in \{1, 2, \ldots , M_1-1\}\) , we can
\(\mathbf {Step~{3}}\) Solve the following system in the z-dimension when once \(\{E_{ijm}^{n-\frac{2}{3}}\}\) and \(\{E_{ijm}^{n-\frac{1}{3}}\}\) are determined by fixing \(j\in \{1, 2, \ldots , M_2-1\}\) and \(i\in \{1, 2, \ldots , M_1-1\}\) as
3.2 Analysis of the ADI difference approach in three case
Following a similar process used in the 2D case, we only consider the convergence analysis of the proposed scheme (49)–(50). To begin with, we present the following significant lemmas.
Lemma 13
(Sun 2009; Wang and Vong 2014b) Assume that \(w, v\in \mathring{\varOmega } \) and w, v are grid functions. Then it holds that
Lemma 14
(Sun 2009) Let us define grid functions \(w, v\in \mathring{\varOmega } \). We obtain
At first, define
Now, we obtain the error system of equations by subtracting (49)–(50) from (47) and (48), respectively, as
Theorem 2
(Convergence). Assume that \(\{u^n\}_{n=0}^{N}\) and \(\{U^n\}_{n=0}^{N}\) represent the solutions of (1)–(3) and (49)–(50), respectively. If \(u(x,y,z,t)\in C^{4,4,4,2}_{x,y,z,t}\big ([0, L_1]\times [0, L_2]\times [0, L_3]\times [0,T]\big )\), then we can arrive at
Proof
We can obtain the following weak formulation employing the inner product of (56) by \(\tau e^n\) and the summing from \(n = 1\) to \(k = M\) as well as adding small term \(\tau \mu _1(e^0, e^0)\) to the both sides of (56) as
Below we shall estimate the terms in (58). For the first term \(\Xi _1\), according to Lemma 5, we have
Then for \(\Xi _2\), utilizing Poincaré inequality \(\tilde{\lambda }\Vert e^n\Vert \le \Vert \nabla e^n\Vert \), we yield
For \(\Xi _3\), from Lemmas 10–12, we have
Next for \(\Xi _4\), applying Lemma 12 (i), we arrive at
Moreover, for \(\Xi _5\), in view of Lemmas 13–14, we have
Let us denote \(\tau \mu _1\mu _2^2:=\mu _3=\mathcal {O}(\tau ^2|\ln \tau |), \tau \mu _1\mu _2^3:=\mu _4=\mathcal {O}(\tau ^3|\ln \tau |^2)\), then we obtain
Finally, employing Cauchy–Schwarz inequality and Young inequality \(ab\le \varepsilon a^2+\frac{1}{4\varepsilon }b^2 (a,b\in \mathbb R,\varepsilon >0)\), we arrive at
Substituting (59)–(65) into (58) and noticing \(e^0 = 0\), we can obtain
After simplification, we can get
Thus, we obtain
which finishes the proof. \(\square \)
4 Numerical results and discussion
This section presents two test problems to show the accuracy and computational efficiency of the proposed algorithm. Here, the ADI schemes (24)–(25) and (49)–(50) are adopted to approximate the problem (1)–(3). Let \(M_1=M_2=M_3=M=\frac{L}{h}\) with \(L=1\) , \(T=0.5\) and \(\mu =0.5\). For this aim, we calculate the maximum error and associated convergence orders as
Numerical computations have been done in Matlab environment with a desktop computer with Windows 10 and RAM 16 GB.
Example 1
Let us consider the two-dimensional problem (1)–(3) including an analytic solution
such that the weight function and the source term are
respectively.
We solve this example with various values of parameters at total time T based on the proposed method in the temporal and spatial dimensions. Tables 1 and 2 report the maximum absolute errors, associated time convergence orders and CPU run times (in s) when the space and distribution step sizes are fixed. It is seen that the proposed algorithm (49)–(50) is second-order convergent in the time direction. Tables 3 and 4 list the maximum absolute errors, associated time convergence orders and CPU run times (in s) when the time and distributed-order step sizes are fixed. We observe that the proposed method (49)–(50) is second-order convergent in the spatial direction. Table 5 displays the maximum absolute errors, distributed orders and CPU run times (s) and reflects the second order in distributed-order. Looking at Tables 1, 2, 3, 4 and 5 as a whole, we see that the proposed method has less time-consuming in the case of the two-dimensional problem. Figure 2 depicts the temporal convergence order when \(h=\frac{1}{64}\), \(\triangle \alpha =\frac{1}{128}\) and \(q = 2\), while Fig. 3 represents the spatial convergence order when fixed \(\tau =\frac{1}{256}\) and \(\triangle \alpha =\frac{1}{256}\). Finally, Fig. 4 demonstrates the distributed convergence order for fixed \(\tau =\frac{1}{380}\), \(h=\frac{1}{55}\) and \(q = 3\).

The CPU run times with \(\tau =\frac{1}{400}\), \(\triangle \alpha =\frac{1}{32}\), \(\mu =0.1\) and \(q = 2\) for the ADI FD scheme and the SFD scheme

The time convergence order with \(h=\frac{1}{64}\), \(\triangle \alpha =\frac{1}{128}\) and \(q = 2\)

The space convergence order with \(\tau =\frac{1}{256}\), \(\triangle \alpha =\frac{1}{256}\) and \(q = 2\)

The distributed convergence order when \(\tau =\frac{1}{380}\), \(h=\frac{1}{55}\) and \(q = 3\)
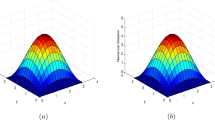
To show the efficiency of the ADI algorithm, we show the maximum errors, spatial convergence orders and CPU run times for the ADI FD scheme and the standard finite difference (SFD) scheme in Table 6. From Table 6 we can see that the errors do not have much difference between the two methods, at the same time, our ADI method has a better spatial convergence order and a shorter running time. Then we present Fig. 1, which intuitively illustrate the efficiency of the proposed method. In summary, these demonstrate the competitiveness of the ADI algorithm (Figs. 2, 3, 4).
Example 2
Consider the three-dimensional problem (1)–(3) including an analytic solution \(u(x,y,z,t)= t^q \sin (\pi x) \sin (\pi y) \sin (\pi z)\) such that the weight function and the source term are
and
respectively.
We simulate this example with different values of parameters at total time T based on the proposed method in the temporal and spatial dimensions. Tables 7 and 8 extract the maximum absolute errors, associated time convergence orders and CPU run times (in s) when the space and distribution step sizes are fixed. It is observed that the proposed method (49)–(50) is second-order convergent in the time direction. Tables 9 and 10 report the maximum absolute errors, associated time convergence orders and CPU run times (in s) when the time and distributed-order step sizes are fixed. It is seen that the proposed method (49)–(50) is second-order convergent in the space direction. Table 11 shows the maximum absolute errors, distributed orders and CPU run times (s) and reflects the second order in distributed-order. Looking at Tables 7, 8, 9, 10 and 11 as a whole, we observe that the proposed method has less time-consuming in the case of the three-dimensional problem.
5 Concluding remarks
This paper analyzed and constructed the ADI difference approaches in two/three dimensions for distributed-order integrodifferential equations. The proposed method computed the unknown solution in two parts. First, the distributed-order time-fractional derivative and the RLFI term were approximated by using the weighted and shifted Grünwald–Letnikov expansion and second-order CQ, respectively. Second, the spatial discretization was obtained by the general centered FD method. The convergence of the ADI difference approaches was thoroughly proven and verified numerically. Numerical experiments highlighted the validity of the method and supported the theoretical predictions.
References
Abbaszadeh M, Dehghan M (2017) An improved meshless method for solving two-dimensional distributed order time-fractional diffusion-wave equation with error estimate. Numer Algorithms 75(1):173–211
Abdelkawy M, Amin A, Lopes AM (2022) Fractional-order shifted legendre collocation method for solving non-linear variable-order fractional Fredholm integro-differential equations. Comput Appl Math 41(1):1–21
Akram T, Abbas M, Ali A (2021) A numerical study on time fractional Fisher equation using an extended cubic B-spline approximation. J Math Comput Sci 22(1):85–96
Alia A, Abbasb M, Akramc T (2021) New group iterative schemes for solving the two-dimensional anomalous fractional sub-diffusion equation. J Math Comput Sci 22(2):119–127
Atanackovic TM, Pilipovic S, Zorica D (2009) Time distributed-order diffusion-wave equation. i. volterra-type equation. Proc R Soc A: Math Phys Eng Sci 465(2009):1869–1891
Bagley RL, Torvik PJ (2000) On the existence of the order domain and the solution of distributed order equations—Part i. Int J Appl Math 2(2000):865–882
Behera S, Ray SS (2022) A wavelet-based novel technique for linear and nonlinear fractional Volterra–Fredholm integro-differential equations. Comput Appl Math 41(2):1–28
Caputo M (2001) Distributed order differential equations modelling dielectric induction and diffusion. Fract Calc Appl Anal 4:421–442
Chen H, Lü S, Chen W (2016) Finite difference/spectral approximations for the distributed order time fractional reaction–diffusion equation on an unbounded domain. J Comput Phys 315:84–97
Chen H, Gan S, Xu D, Liu Q (2016) A second-order BDF compact difference scheme for fractional-order Volterra equation. Int J Comput Math 93(7):1140–1154
Du R, Hao ZP, Sun Z (2016) Lubich second-order methods for distributed-order time-fractional differential equations with smooth solutions. East Asian J Appl Math 6(2):131–151
Gao Gh, Sun Z (2016) Two alternating direction implicit difference schemes for solving the two-dimensional time distributed-order wave equations. J Sci Comput 69(2):506–531
Gao G, Zz S (2016) Two alternating direction implicit difference schemes for two-dimensional distributed-order fractional diffusion equations. J Sci Comput 66(3):1281–1312
Gao G, Alikhanov AA, Zz S (2017) The temporal second order difference schemes based on the interpolation approximation for solving the time multi-term and distributed-order fractional sub-diffusion equations. J Sci Comput 73(1):93–121
Gao X, Liu F, Li H, Liu Y, Turner I, Yin B (2020) A novel finite element method for the distributed-order time fractional Cable equation in two dimensions. Comput Math Appl 80(5):923–939
Hilfer R (2000) Applications of fractional calculus in physics. World Scientific
Huang Q, Qi Rj, Qiu W (2021) The efficient alternating direction implicit Galerkin method for the nonlocal diffusion-wave equation in three dimensions. J Appl Math Comput pp 1–21
Jian HY, Huang TZ, Gu XM, Zhao XL, Zhao YL (2021) Fast second-order implicit difference schemes for time distributed-order and Riesz space fractional diffusion-wave equations. Comput Math Appl 94:136–154
Jin B, Lazarov R, Sheen D, Zhou Z (2016) Error estimates for approximations of distributed order time fractional diffusion with nonsmooth data. Fract Calc Appl Anal 19(1):69–93
Katsikadelis JT (2014) Numerical solution of distributed order fractional differential equations. J Comput Phys 259:11–22
Kochubei AN (2008) Distributed order calculus and equations of ultraslow diffusion. J Math Anal Appl 340(1):252–281
Kumar S, Saha Ray S (2021) Numerical treatment for burgers-fisher and generalized Burgers–Fisher equations. Math Sci 15(1):21–28
Li L, Xu D, Luo M (2013) Alternating direction implicit Galerkin finite element method for the two-dimensional fractional diffusion-wave equation. J Comput Phys 255:471–485
Liu Y, Du Y, Li H, He S, Gao W (2015) Finite difference/finite element method for a nonlinear time-fractional fourth-order reaction–diffusion problem. Comput Math Appl 70(4):573–591
Liu Y, Du Y, Li H, Li J, He S (2015) A two-grid mixed finite element method for a nonlinear fourth-order reaction–diffusion problem with time-fractional derivative. Comput Math Appl 70(10):2474–2492
Lopes AM, Machado JT (2021) Multidimensional scaling analysis of generalized mean discrete-time fractional order controllers. Commun Nonlinear Sci Numer Simul 95:105657
Lopez-Marcos J (1990) A difference scheme for a nonlinear partial integrodifferential equation. SIAM J Numer Anal 27(1):20–31
Lubich C (1988) Convolution quadrature and discretized operational calculus. I. Numer Math 52(2):129–145
Lubich C (1986) Discretized fractional calculus. SIAM J Math Anal 17(3):704–719
Meerschaert MM, Tadjeran C (2004) Finite difference approximations for fractional advection–dispersion flow equations. J Comput Appl Math 172(1):65–77
Meerschaert MM, Nane E, Vellaisamy P (2011) Distributed-order fractional diffusions on bounded domains. J Math Anal Appl 379(1):216–228
Moghaddam B, Dabiri A, Lopes AM, Machado J (2019) Numerical solution of mixed-type fractional functional differential equations using modified Lucas polynomials. Comput Appl Math 38(2):1–12
Morgado ML, Rebelo M (2015) Numerical approximation of distributed order reaction–diffusion equations. J Comput Appl Math 275:216–227
Naber M (2004) Distributed order fractional sub-diffusion. Fractals 12(01):23–32
Nakhushev AM (2003) Fractional calculus and its application, p 272
Nakhushev AM (1998) On the positivity of continuous and discrete differentiation and integration operators that are very important in fractional calculusand in the theory of equations of mixed type. Differ Uravn 34(1):101–109
Nikan O, Avazzadeh Z (2021) Numerical simulation of fractional evolution model arising in viscoelastic mechanics. Appl Numer Math 169:303–320
Nikan O, Avazzadeh Z, Machado JT (2021) Numerical approach for modeling fractional heat conduction in porous medium with the generalized Cattaneo model. App Math Model 100:107–124
Nikan O, Avazzadeh Z, Machado JT (2021) Numerical study of the nonlinear anomalous reaction-subdiffusion process arising in the electroanalytical chemistry. J Comput Sci 53:101394
Pani AK, Fairweather G, Fernandes RI (2010) Adi orthogonal spline collocation methods for parabolic partial integro-differential equations. IMA J Numer Anal 30(1):248–276
Podlubny I (1999) Fractional differential equations. Academic Press, Elsevier, San Diego
Pskhu AV (2004) On the theory of the continual integro-differentiation operator. Differ Equ 40:1
Pskhu AV (2005) Partial differential equations of fractional order. Nauka, Moscow
Qiao L, Qiu W, Xu D (2021) A second-order ADI difference scheme based on non-uniform meshes for the three-dimensional nonlocal evolution problem. Comput Math Appl 102:137–145
Qiao L, Xu D, Qiu W (2022) The formally second-order BDF ADI difference/compact difference scheme for the nonlocal evolution problem in three-dimensional space. Appl Numer Math 172:359–381
Qiu W, Chen H, Zheng X (2019) An implicit difference scheme and algorithm implementation for the one-dimensional time-fractional burgers equations. Math Comput Simul 166:298–314
Qiu W, Xu D, Chen H, Guo J (2020) An alternating direction implicit Galerkin finite element method for the distributed-order time-fractional mobile-immobile equation in two dimensions. Comput Math Appl 80(12):3156–3172
Qiu W, Xu D, Guo J, Zhou J (2020) A time two-grid algorithm based on finite difference method for the two-dimensional nonlinear time-fractional mobile/immobile transport model. Numer Algorithms 85(1):39–58
Sun Z (2009) The method of order reduction and its application to the numerical solutions of partial differential equations. Science Press, Beijing
Tarasov V (2021) From fractional differential equations with Hilfer derivatives. Comput Appl Math 40(8):1–17
Tarasov VE (2021) Integral equations of non-integer orders and discrete maps with memory. Mathematics 9(11):1177
Tian W, Zhou H, Deng W (2015) A class of second order difference approximations for solving space fractional diffusion equations. Math Comput 84(294):1703–1727
Wang Z, Vong S (2014) Compact difference schemes for the modified anomalous fractional sub-diffusion equation and the fractional diffusion-wave equation. J Comput Phys 277:1–15
Wang Z, Vong S (2014) A high-order exponential ADI scheme for two dimensional time fractional convection–diffusion equations. Comput Math Appl 68(3):185–196
Xu D (1997) The global behavior of time discretization for an abstract Volterra equation in Hilbert space. Calcolo 34(1):71–104
Yang X, Zhang H, Xu D (2018) WSGD-OSC scheme for two-dimensional distributed order fractional reaction–diffusion equation. J Sci Comput 76(3):1502–1520
Zhang Y, Sun Z-Z, Wu H (2011) Error estimates of Crank–Nicolson-type difference schemes for the subdiffusion equation. SIAM J Numer Anal 49(6):2302–2322
Zhang H, Liu F, Jiang X, Turner I (2022) Spectral method for the two-dimensional time distributed-order diffusion-wave equation on a semi-infinite domain. J Comput Appl Math 399:113712
Acknowledgements
The authors are grateful to three anonymous referees and editors for their valuable comments and helpful suggestions to improve the quality of this paper.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Additional information
Communicated by Vasily E. Tarasov.
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Guo, T., Nikan, O., Avazzadeh, Z. et al. Efficient alternating direction implicit numerical approaches for multi-dimensional distributed-order fractional integro differential problems. Comp. Appl. Math. 41, 236 (2022). https://doi.org/10.1007/s40314-022-01934-y
Received:
Revised:
Accepted:
Published:
DOI: https://doi.org/10.1007/s40314-022-01934-y
Keywords
- Caputo fractional derivative
- Distributed-order integrodifferential equation
- Weighted and shifted Grünwald formula
- Alternating direction implicit scheme
- Second-order convolution quadrature rule
- Error estimate