
Abstract
The Crank–Nicolson orthogonal spline collocation (OSC) methods are considered for approximate solution of the variable coefficient fractional mobile–immobile equation. The convection, diffusion, and reaction coefficients can depend on both the spatial and temporal variables, simultaneously. Combining with Crank–Nicolson scheme and weighted and shifted Grünwald difference approximation in time, we establish OSC method in space. It is proved that our proposed fully methods are of optimal order in certain \(H_j\) (\(j=0,1\)) norms. Moreover, we derive \(L^{\infty }\) estimates in space. Numerical results are also provided to verify our proposed algorithm.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
In this paper, we consider the following fractional-order mobile–immobile equation with variable coefficients:
where \(\Omega \subset \text {R}^2\) is bounded convex polygonal domain with boundary \(\partial \Omega \), and f and \(u_0\) are given functions. \({\mathcal {L}}u={\mathcal {L}}_1u+{\mathcal {L}}_2u\), \({\mathcal {L}}_1u=-p_1(x,y,t)u_{xx}+q_1(x,y,t)u_x+r(x,y,t)u\), and \({\mathcal {L}}_2u=-p_2(x,y,t)u_{yy}+q_2(x,y,t)u_y\). There exist positive constants \(p_{\text {min}}, p_{\text {max}}\), such that \(0< p_{\text {min}} \le p_1(x,y,t),p_2(x,y,t)\le p_{\text {max}}\). Herein, we consider operator \({\mathcal {L}}\) in the non-divergence forms rather than in the divergence forms, because the non-divergence forms are more natural for OSC spatial discretization. The Caputo fractional derivative \(^C_0D^{\alpha }_t\) is defined by:
The fractional-order mobile–immobile equations are a type of second order PDEs, which describe a family of problems including heat diffusion and ocean acoustic propagation in mathematical systems with the time variable t and behaves like heat diffusing through a solid. The time drift term \(u_t\) is added to exhibit the motion time and thus helps to distinguish the status of particles conveniently. The model is the limiting equation which control continuous time random walks with heavy-tailed random waiting times. Hence, it is difficult or infeasible to find the analytical solution of this equations in most cases, and then to find its numerical solutions become more necessary. Most of previous works concentrate on constant coefficient problems Jiang (2015), Wei (2017, 2018), Chen et al. (2016), He and Pan (2017, 2018), and Liu et al. (2015). For variable coefficient, Cui (2015) studied the time fractional convection–diffusion reaction equation with variable coefficients by the compact exponential scheme. Wang et al. (2019) provide a novel high-order approximate scheme for time-fractional 2D diffusion equations with variable coefficient. Liu et al. (2012) analyzed novel and efficient numerical methods for a class of fractional advection–dispersion models, including the mobile/immobile time-fractional advection–dispersion model with a Caputo fractional derivative. Subsequently, Liu et al. (2014) constructed an RBF meshless method for a fractal mobile–immobile transport model. Zhang et al. (2013) described an implicit Euler approximation for the time-variable fractional-order mobile–immobile advection–dispersion model. Recently, Liu et al. Liu and Li (2018) introduced the Crank–Nicolson finite-difference scheme to solve a time-variable fractional-order mobile–immobile advection–dispersion equation, and proved a priori estimates of discrete \(L^2\)-norm.
Published articles on numerical methods for fractional mobile–immobile convection–subdiffusion equation with variable coefficients are still sparse. This motivates us to consider high accuracy numerical schemes for solving them. The current work is devoted to deriving a high-order scheme by combining Crank–Nicolson and weighted and shifted Grünwald difference approximation for time derivative and OSC scheme for space. There have been many earlier research papers discussing OSC schemes for steady and/or unsteady convection–diffusion equations of integer order, e.g., Bialecki (1998), Bialecki and Fernandes (1993), Fernandes and Fairweather (1993), Yan and Fairweather (1992), Zhang et al. (2019), and Yang et al. (2019). However, numerical approximation referring OSC method for fractional-order convection–subdiffusion equations with variable coefficients is still at an early stage of development. Thus, it is important and necessary to develop efficient numerical methods to solve them.
The structure of the paper is organized as follows. In Sect. 2, the Crank–Nicolson OSC method is derived. The heart of our paper is Sect. 3, where we prove the stability and convergence in certain \(H_j\) (\(j=0,1\)) norms for proposed scheme. In Sect. 4, numerical experiments are given; at last, some conclusions are drawn in Sect. 5.
2 The Crank–Nicolson OSC scheme
2.1 Preliminaries
Let \(N_x, N_y\), and N be some positive integer, the collection of spatial quasi-uniform Percell and Wheeler (1980) mesh of \(\Omega \) defined by \(\delta \equiv \delta _x\times \delta _y, \delta _x: 0=x_0<x_1<\cdots<x_{N_x}=1, \delta _y: 0=y_0<y_1<\cdots <y_{N_y}=1 \), \(1\le k\le N_x, 1\le l\le N_y\).
Denote by \({\mathcal {M}}_r(\delta )\equiv {\mathcal {M}}(r, \delta _x)\otimes {\mathcal {M}}(r, \delta _y)\) a space of piecewise polynomials in x and y, \({\mathcal {M}}(r,\delta _x)=\left\{ u|u\in C^1([0,1]), u|_{[x_{k-1},x_{k}]}\in P_r, u(0)=u(1)=0\right\} \), and \(P_r\) denotes the space of all polynomials of degree less than or equal to r. With \({\mathcal {M}}(r,\delta _y)\) defined similarly.
Let \(\{\lambda _k\}_{k=1}^{r-1}\) and \(\{\omega _k\}_{k=1}^{r-1}\) be the nodes and weights of the \((r-1)\)-point Gauss quadrature rule on [0, 1]. In domain \(\Omega \), we define Gauss collocation points set: \(\Lambda _r\equiv \{\xi |\xi =(\xi ^x, \xi ^y), \xi ^x\in \Lambda _x, \xi ^y\in \Lambda _y\},\Lambda _x=\{x_{i-1}+\lambda _kh^x_i\}_{i,k=1}^{N_x,r-1}\), \(h_k^x=x_{k}-x_{k-1}\). With \(\Lambda _y\) defined similarly.
At last, the discrete inner product and norm are defined by:
2.2 Construction of OSC scheme
In this subsection, we will consider Crank–Nicolson OSC scheme for approximating the solution of problem (1.1). Let temporal domain [0, T] be divided by the partition \(\{t_k\}_{k=0}^K\) with \(t_k=k\tau \), and \(\tau =T/K\). Next, we introduce some difference quotient notations:
We first consider the weighted and shifted Grünwald–Letnikon approximation Tian et al. (2015) and Wang and Vong (2014) for \(^C_0D^{\alpha }_tu(\cdot ,t)\):
where
and
It can be checked directly for \(0< \alpha < 1\) that the coefficients \(\{g_k^{(\alpha )}\}_{k=0}^{\infty }\) and \(\{\lambda _k^{(\alpha )}\}_{k=0}^{\infty }\) satisfy the following properties:
Moreover, for any real vector \((w_1, w_2, \ldots , w_k)^{\text {T}}\in {\mathbb {R}}^k\), it holds that:
For the proof, see Wang and Vong (2014).
The estimate of \(R^{(\alpha )}_{n+1}\) can be found in Tian et al. (2015), and satisfies:
where \({\mathfrak {F}}\) denotes the Fourier transform symbol, and \(u\in C^2\), \(^{RL}_0D^{\alpha +2}_tu\), and its Fourier transform belong to \(L^{1}({\mathbb {R}})\).
Therefore, using the approximate formula (2.1), the Crank–Nicolson OSC scheme for Eq. (1.1) consists in finding \(\{u_h^n\}_{n=0}^{K}\subset {\mathcal {M}}_r(\delta )\), such that, for all \(\xi \in \Lambda _r\):
where \({\mathcal {L}}^{n+\frac{1}{2}}\) and \(f^{n+\frac{1}{2}}\) denote the operator \({\mathcal {L}}(t)\) and the function f(t), respectively, evaluated at \(t=t_{n+\frac{1}{2}}\). For the stability and error analysis, we rewrite the above equation in the equivalent form:
where, for convenience, we have omitted the dependence of \(u^{n+1}(\xi )\) on \((\xi )\) in the above equation.
3 Analysis of the Crank–Nicolson OSC scheme
To analyze the convergence of fully discrete scheme (2.6), we begin with the following Lemma.
Lemma 3.1
Bialecki and Fernandes (1993) If \({\mathcal {L}}={\mathcal {L}}_1+{\mathcal {L}}_2\), and assume \(p_1\in C^{5,0,0}(\Omega _T)\), \(p_2\in C^{0,5,0}(\Omega _T)\), \(q_1,q_2,r\in C(\Omega _T)\). Also assume that \(p_i,i=1,2\) satisfy the Lipschitz condition with respect to t, that is, for \((x,y)\in \Omega , t_1,t_2\in (0,T]\), there is a constant \(C>0\), such that
then we can show that:
where \(A_i(t;\cdot ,\cdot )\), \(t\in (0,T]\), \(i=0,1\), are real-valued bilinear forms on \({\mathcal {M}}_r(\delta )\times {\mathcal {M}}_r(\delta )\) for all \(t\in (0,T]\), \(W,V\in {\mathcal {M}}_r(\delta )\), \(p_{min}\), \(p_{max}\), and C are positive constants, we have:
where
For the proof, see Bialecki and Fernandes (1993), Lemma 3.2.
3.1 \(L^2\) stability analysis
The \(L^2\) stability of Crank–Nicolson OSC scheme (2.6) is given in the following theorem.
Theorem 3.2
The Crank–Nicolson OSC scheme (2.6) is stable with respect to \(L^2\) norm. Specifically, for \(u^m_h\in {\mathcal {M}}_r(\delta )\), it holds:
Proof
Taking \(v_h=u_h^{n+\frac{1}{2}}\) in (2.6), for \(0\le n\le K-1\), we obtain:
Since
it follows from (3.1) of Lemma 3.1 that:
from Eq. (3.4) of Fernandes and Fairweather (1993), we have:
Furthermore, using (3.3) and (3.5), we have:
on substituting (3.8) and (3.11) into (3.7), multiplying the result equation by \(2\tau \), and then summing from \(n=0\) to \(n=m-1\), \(1\le m\le K\), we obtain:
It follows from (2.4), we obtain:
dropping the non-positive the third term on the RHS of (3.12), then applying the Cauchy–Schwarz inequality and Young’s inequality to the last two terms on the RHS of the resulting expression, and noticing \( \Vert u_h^{n+\frac{1}{2}}\Vert _{{\mathcal {M}}_r}\le \frac{1}{2}(\Vert u_h^{n+1}\Vert _{{\mathcal {M}}_r}+\Vert u_h^{n}\Vert _{{\mathcal {M}}_r}), \) we have:
Using the discrete Gronwall lemma, (2.3), and (3.13), we complete the proof of Theorem 3.2. \(\square \)
3.2 \(H^1\) stability analysis
In the following theorem, we derive the \(H^1\) stability of the Crank–Nicolson OSC scheme (2.6).
Theorem 3.3
The Crank–Nicolson OSC scheme (2.6) is stable with respect to \(H^1\) norm. Specifically, for \(u^m_h\in {\mathcal {M}}_r(\delta )\), \(\ 1\le m\le K\), it holds:
Proof
Setting \(v_h=\delta _tu_h^{n+1}\) in (2.6), for \(0\le n\le K-1\), we obtain:
First, we have to handle the first term on RHS of (3.15) as follows:
Now, we handle the second term on LHS of (3.15), following (3.1) of Lemma 3.1, we have:
since
substituting (3.16)–(3.18) into (3.15), multiplying the result equation by \(2\tau \), and then summing from \(n=1\) to \(n=m-1\), \(1\le m\le K\), we obtain:
Taking \(n=0\) in (3.15), we obtain:
following (3.1):
Furthermore, substituting (3.21) into (3.20), multiplying the resulting expression by \(2\tau \), we have:
adding (3.22)–(3.19), for \( 1\le m\le K\), we have:
It follows from (2.4) that:
using (3.10) and (3.3), we have:
using Eq. (3.5) of Fernandes and Fairweather (1993), we have:
also, using (3.26) and (3.4) in Lemma 3.1, we have:
Similarly, using (3.5) in Lemma 3.1 and (3.26), we have:
Thus, on substituting (3.24)–(3.28) into (3.23), dropping the non-positive the fourth term on the RHS of (3.23), and then applying the Cauchy–Schwarz inequality to the last three terms on the RHS of the resulting expression, we have:
Using (2.3), noticing \( \Vert \nabla u_h^{n+\frac{1}{2}}\Vert \le \frac{1}{2}(\Vert \nabla u_h^{n+1}\Vert +\Vert \nabla u_h^{n}\Vert ) \), \(\Vert u_h^{n-k}\Vert _{{\mathcal {M}}_r}\le C\Vert \nabla u_h^{n-k}\Vert _{{\mathcal {M}}_r}\), applying the Young’s inequality, and simplifying, we have:
by choosing \(\tau \) small so that \(p_{\text {min}}-C\tau >0\), and using the discrete Gronwall lemma, we have:
The proof of Theorem 3.3 is completed. \(\square \)
3.3 Convergence and a superconvergence result
In this subsection, we will consider the convergence of Crank–Nicolson OSC scheme. To analyze the convergence, we need to define an elliptic projection W: \([0,T]\rightarrow {\mathcal {M}}_r(\delta )\), for \(\ t\in [0,T]\):
As in Bialecki (1998), for a given function u, Eq. (3.31) has a unique solution \(W\in {\mathcal {M}}_r(\delta )\).
To finish our analysis, we now introduce two lemmas which provide estimates for \(u-W\) and its time derivatives.
Lemma 3.4
Bialecki (1998) Assume u, \(\partial u/\partial t \in H^{r+3-j},\ j=0, 1\), and W satisfies (3.31), and then, there exists a constant C, independent of h, such that:
Lemma 3.5
Bialecki (1998) Assume u, \(\partial u/\partial t\in H^{r+3}\), for \(t\in \left[ 0,T\right] \), \(l=l_1+l_2\), we have:
Now, we derive an optimal \(H^{\ell }\) (\(\ell =0,1\)) error estimate.
According to the definition of W in (3.31), for \(0 \le n \le K\), we assume:
then
It is easy to known that the estimates of \(\eta ^{n}\) are known from Lemmas 3.4 and 3.5. Therefore, to bound \(u^n-u_h^{n}\), we need only to bound \(\zeta ^{n}\).
First, from (1.1) and (3.31) at \(t=t_{n+\frac{1}{2}}\), (2.6), (3.34), and (3.35), and then for \(v_h\in {\mathcal {M}}_r(\delta )\), we obtain:
where
and
In the following lemma, we derive estimates on \(\sigma _{\alpha ,u}^{n+\frac{1}{2}}\) that are required to prove the convergence estimates for the proposed Crank–Nicolson OSC scheme in \(H^{\ell }\) (\(\ell =0,1\)) norms on each time level.
Lemma 3.6
If \(u\in C^{2,0,0}\cap C^{0,2,0} \cap C^{0,0,3}\), \(^{RL}_0D^{\alpha }_tu, u_{tt}\in C\left( [0,T],H^{r+3}\right) \), \(^{RL}_0D^{\alpha +2}_tu\) and its Fourier transform belong to \(L^{1}({\mathbb {R}})\), for \(n=0,1,\ldots ,K-1\), then we have:
Proof
Since
Using Taylor’s theorem with integral remainder, we obtain:
For the term \(\sigma _3^{n+\frac{1}{2}}\), we obtain, on using Taylor’s theorem and the boundedness of the coefficients:
Since
then, using Taylor’s theorem and arguments as in (3.39), together with Lemma 3.5 (\(l=2\), \(j=2\)), since \(r\ge 3\), it follows on using (Fernandes and Fairweather 1993, Lemma 3.2) that:
By (2.5), we know that:
Hence, using Lemma 3.5, we have:
Note that
Applying the triangle inequality to (3.37) and using (3.39)–(3.40) and (3.43)–(3.45) yield (3.38). The proof of the Lemma 3.6 is completed. \(\square \)
Convergence estimates for the Crank–Nicolson OSC method (2.6) in the \(H^{\ell }\) norms, \(\ell =0,1,\) are proved in the following theorem.
Theorem 3.7
If the hypotheses of Lemma 3.6 are satisfied and suppose that u is the solution of (1.1), and \(u_h^m\) (\(0\le m\le K\)) is the solution of the problem (2.6) with \(u^0_h=W^0\), then there exists a positive constant C, independent of h and \(\tau \), such that
Proof
We first apply the stability result (3.6) and (3.14)–(3.13) to obtain:
and
Since \(\zeta ^0=0\), it follows from Lemma 3.6 that:
and
Therefore, (3.46) for \(j=0\) and \(j=1\) is obtained on using the triangle inequality, (3.49) and (3.50), respectively, and (3.32) with \(l=0, j=0\) and \(l=0, j=1\), respectively. \(\square \)
Remark 3.8
If we choose \(u^0_h\) as the elliptic projection \(W^0\) of \(u_0\) defined in (3.31), then \(\zeta ^0=0\). Hence, from (3.50), we obtain a superconvergence result for \(\Vert \zeta ^{m}\Vert _{H^1}\), \(1\le m\le K\), namely:
From Sobolev’s inequality, we obtain, since: \(\zeta ^{m}\in {\mathcal {M}}_r\),
If the optimal maximum norm estimate for \(\eta ^m\) are available, namely:
Then, on using the triangle inequality, we obtain a quasi-optimal \(L^{\infty }\) error estimate:
Remark 3.9
If the hypotheses of Lemma 3.6 are satisfied, then (3.46) also holds for \(j=0\) and \(j=1\), and suppose \(u_h^0\) is chosen, so that
This is satisfied by the choice \(u_h^0=u_{{\mathcal {H}}}^0\), the Hermite interpolant of \(u_0\) defined in Bialecki (Eq. 2.18, Bialecki 1998).
4 Numerical experiments
In this section, we will present numerical experiments to illustrate our theoretical statements. We used the space of piecewise Hermite bicubics (\(r=3\)) with the standard value and scaled slope basis functions Yan and Fairweather (1992) on uniform partitions of [0, 1].
Example 1
We consider the following problem similar to Chen et al. (2016):
and
with the exact solution \(u(x,t)=t^2\frac{\sin (2\pi x)}{(1+x)^2}.\)
In Table 1, we select \(\tau =h^2\) \((K=N^2)\), since, from our theoretical estimates, the error in the \(L^2\) norm is expected to be \({\mathcal {O}}(\tau ^{2}+h^{4})\) when \(r=3\). Just as we hope, the results in Table 1 demonstrate the expected convergence rates of 4 order in space and 2 in time for different \(\alpha \) (\(\alpha =0.15,0.5,0.95\)).
We now verify the temporal accuracy and convergence rates for our proposed method, and select \(\tau =h\) \((K=N)\), so that the error stemming from the spatial approximation is negligible. Table 2 verifies 2 order accuracy in time for all four different \(\alpha \) (\(\alpha =0.1,0.5,0.99\)), which are in keeping with the theoretical predictions.
By selecting \(\tau =h^{3/2}\) and different \(\alpha \) (\(\alpha =0.01,0.4,0.7,0.9\)), Table 3 indicates \(H^1\) errors and convergence rates in spatial direction. The convergence rate of 3 order matches that of the theoretical one.
Example 2
We consider the following problem similar to Chen et al. (2016):
where \(\Omega =[0,1]\), \(T=1\):
Tables 4, 5, 6 show the errors and convergence rates in three discrete norms for Example 2.
For the fractional order \(\alpha =0.25,0.5,0.95\), Table 4 shows the \(L^2\) and \(L^{\infty }\) errors and convergence rates, and verifies that the space convergence rate is 4 and time convergence rate is 2 for each \(\alpha \). It is obvious that the numerical convergence order matches well with the theoretical results.
In Table 5, for the fractional order \(\alpha =0.01,0.35,0.65,0.99\), we present the convergence order in temporal direction. It is easy to conclude that the method is convergent and the convergence order in time is 2 corresponding to each \(\alpha \).
We show the errors in \(H^1\) norm for \(\alpha =0.01,0.3,0.6,0.8\) in Table 6. It is clear that the convergence rate is three, which is the same as theoretically claimed.
Example 3
We consider the following problem Chen et al. (2016):
with
In this example, by choosing the same parameter h, \(\tau \) and \(\alpha \) as in Chen et al. (2016), we compare the numerical results of our scheme with the method in Chen et al. (2016). To eliminate the contamination of the spatial error, we choose \(h=1/125\), which is large enough as the solution is analytic. Tables 7, 8 display \(L^{2}\) and \(L^{\infty }\) errors and the convergence orders with \(\alpha = 0.1, 0.5, 0.9\), respectively. The last two columns of Tables 7 and 8 present the numerical results obtained in Chen et al. (2016). From Tables 7 and 8, we can see that the present method have similar accuracy and convergence order in time as reference Chen et al. (2016).
In the following Example 4, we mainly test problem based on the Gaussian pulse and the noise effect to show the efficiency of the developed technique.
Example 4
Let \(\Omega =[0,1]\), \(T=1\), we consider the following problem:
with the exact solution \(u(x,t)=t^{2+\alpha }e^{-\frac{(x-0.5)^2}{\beta }}\sin (\pi x)\), where \(\beta \) is small parameter.

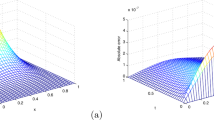
Left: the exact solution. Right: the numerical solution

The absolute error of the numerical solution at \(\alpha =0.5\) and \(\tau ^2=h^4=\frac{1}{1600}\) for Example 4
In Fig. 1, we draw the surface figures of the exact solution u and the numerical solution \(u_h\) with \(h=1/40\), \(\tau =1/1600\), \(\alpha =0.5\), and \(\beta =0.01\), respectively. We can clearly see that the exact solution u can be simulated well by the approximation solution \(u_h\) for our discrete scheme in this case. In Fig. 2, we give the error surface figure for \(|u-u_h|\). From the error figure, we can find that our numerical method can solve well the numerical solution in this case.
5 Conclusion
In the present work, we have developed an effective Crank–Nicolson OSC scheme for fractional-order mobile–immobile equation with variable coefficients. It is proved that our proposed fully methods are of optimal order in certain \(H_j\) (\(j=0,1\)) norms. Also, \(L^{\infty }\) estimates in space are derived. Some numerical examples have been carried out to verify the accuracy and efficiency of Crank–Nicolson OSC scheme.
References
Bialecki B (1998) Convergence analysis of orthogonal spline collocation for elliptic boundary value problems. SIAM J. Numer. Anal. 35:617–631
Bialecki B, Fernandes RI (1993) Orthogonal spline collocation Laplace-modified and alternating-direction methods for parabolic problems on rectangles. Math. Comput. 60:545–573
Chen H, Lü SJ, Chen WP (2016) Spectral and pseudospectral approximations for the time fractional diffusion equation on an unbounded domian. J. Comput. Appl. Math. 304:43–56
Chen HB, Gan SQ, Xu D, Liu QW (2016) A second-order BDF compact difference scheme for fractional-order Volterra equations. Int. J. Comput. Math. 93:1140–1154
Cui MR (2015) Compact exponential scheme for the time fractional convection–diffusion reaction equation with variable coefficients. J. Comput. Phys. 280:143–163
Fernandes RI, Fairweather G (1993) Analysis of alternating direction collocation methods for parabolic and hyperbolic problems in two space variables. Numer. Methods Partial Differ. Equ. 9:191–211
He DD, Pan KJ (2017) An unconditionally stable linearized CCD–ADI method for generalized nonlinear Schrödinger equations with variable coefficients in two and three dimensions, Comput. Math. Appl. 73:2360–2374
He DD, Pan KJ (2018) An unconditionally stable linearized difference scheme for the fractional Ginzburg–Landau equation. Numer. Algorithms 79:899–925
Jiang YJ (2015) A new analysis of stability and convergence for finite difference schemes solving the time fractional Fokker–Planck equation. Appl. Math. Model. 39:1163–1171
Liu Z, Li X (2018) A Crank–Nicolson difference scheme for the time variable fractional mobile–immobile advection–dispersion equation. J. Appl. Math. Comput. 56:391–410
Liu F, Zhuang P, Burragea K (2012) Numerical methods and analysis for a class of fractional advection–dispersion models. Comput. Math. Appl. 64:2990–3007
Liu Q, Liu F, Turner I, Anh V, Gu YT (2014) A RBF meshless approach for modeling a fractal mobile/immobile transport model. Appl. Math. Comput. 226:336–347
Liu Y, Du YW, Li H, Li JC, He S (2015) A two-grid mixed finite element method for a nonlinear fourth-order reaction diffusion problem with time-fractional derivative. Comput. Math. Appl. 70:2474–2492
Percell P, Wheeler MP (1980) A \(C^1\) finite element collocation method for elliptic partial differential equations. SIAM J. Numer. Anal. 17:923–939
Tian WY, Zhou H, Deng WH (2015) A class of second order difference approximations for solving space fractional diffusion equations. Math. Comput. 84:1703–1727
Wang Z, Vong S (2014) Compact difference schemes for the modified anomalous fractional sub-diffusion equation and the fractional diffusion-wave equation. J. Comput. Phys. 277:1–15
Wang FL, Zhao YM, Chen C, Wei YB, Tang YF (2019) A novel high-order approximate scheme for two-dimensional time-fractional diffusion equations with variable coefficient. Comput. Math. Appl. 78:1288–1301
Wei LL (2017) Analysis of a new finite difference/local discontinuous Galerkin method for the fractional diffusion-wave equation. Appl. Math. Comput. 304:180–189
Wei LL (2018) Analysis of a new finite difference/local discontinuous Galerkin method for the fractional Cattaneo equation. Numer. Algorithms 77:675–690
Yan Y, Fairweather G (1992) Orthogonal spline collocation methods for some partial integro-differential equations. SIAM J. Numer. Anal. 29:755–768
Yang XH, Zhang HX, Zhang Q, Yuan GW, Sheng ZQ (2019) The finite volume scheme preserving maximum principle for two-dimensional time-fractional Fokker–Planck equations on distorted meshes. Appl. Math. Lett. 97:99–106
Zhang H, Liu F, Phanikumar MS, Meerschaert MM (2013) A novel numerical method for the time variable fractional order mobile–immobile advection–dispersion model. Comput. Math. Appl. 66:693–701
Zhang HX, Yang XH, Xu D (2019) A high-order numerical method for solving the 2D fourth-order reaction–diffusion equation. Numer. Algorithms 80:849–877
Acknowledgements
Many thanks to Prof. Graeme Fairweather for stimulating discussions and for his constant encouragement and support.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare to have no conflict of interest.
Additional information
Communicated by Vasily E. Tarasov.
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
The work was supported by National Natural Science Foundation of China (11701168, 11601144), Hunan Provincial Natural Science Foundation of China (2018JJ3108, 2018JJ3109, 2018JJ4062), Scientific Research Fund of Hunan Provincial Education Department (18B304, YB2016B033), and China Postdoctoral Science Foundation (2018M631403).
Rights and permissions
About this article

Cite this article
Yang, X., Zhang, H. & Tang, Q. A spline collocation method for a fractional mobile–immobile equation with variable coefficients. Comp. Appl. Math. 39, 34 (2020). https://doi.org/10.1007/s40314-019-1013-3
Received:
Revised:
Accepted:
Published:
DOI: https://doi.org/10.1007/s40314-019-1013-3
Keywords
- Fractional convection diffusion equation
- Collocation method
- Variable coefficient
- Finite-difference method
- Stability and convergence