
Abstract
We develop a splitting Chebyshev collocation (SCC) method for the time-dependent Schrödinger–Poisson (SP) system arising from theoretical analysis of quantum plasmas. By means of splitting technique in time, the time-dependant SP system is first reduced to uncoupled Schrödinger and Poisson equations at every time step. The space variables in Schrödinger and Poisson equations are next represented by high-order Chebyshev polynomials, and the resulting system are discretized by the spectral collocation method. Finally, matrix diagonalization technique is applied to solve the fully discretized system in one dimension, two dimensions and three dimensions, respectively. The newly proposed method not only achieves spectral accuracy in space but also reduces the computer-memory requirements and the computational time in comparison with conventional solver. Numerical results confirm the spectral accuracy and efficiency of this method, and indicate that the SCC method could be an efficient alternative method for simulating the dynamics of quantum plasmas.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Quantum plasmas are ubiquitous in micromechanical systems and ultrasmall electronic devices (Markowich et al. 1990; Sulem and Sulem 1999), in laser and microplasmas (Becker et al. 2006), in dense astrophysical environments (Opher et al. 2001) and in semiconductors (Markowich et al. 1990; Wang and Lu 2014).
Classical motion of charged particles can be described by kinetic equations (Vlasov or Boltzmann equation) coupled to Poisson equation for the electrostatic forces (see Ben 2000; Shukla and Stenflo 2006; Shukla and Eliasson 2006, 2007, and references therein). For ultrasmall electron devices, like nanostructures, quantum effects such as tunneling become important when the de Broglie length of the charge carriers is comparable to the dimension of the system. Such devices are well described by the Schrödinger–Poisson (SP) system (Shukla and Stenflo 2006). The SP system has been also used to model the dynamics of quantum plasma (Anderson 2002; Haas et al. 2000; Haas 2003; Manfredi and Haas 2001; Manfredi 2005) and was developed from the Vlasov equation coupled with the Poisson equation for the electric potential (Manfredi and Haas 2001; Shukla and Eliasson 2010; Shukla and Stenflo 2006). We also note that the SP system was originally derived by Hartree in the context of atomic physics for studying the self-consistent effect of atomic electrons on the Coulomb potential of the nucleus.
As far as we know, several kinds of numerical methods have been investigated on solving the SP system. Cheng et al. developed a novel fast-spectral element method for the self-consistent solution of the SP system in the simulation of semiconductor nanodevices (Cheng et al. 2004), where the field variables in SP equations are represented by high-order Legendre polynomials. Dong studied a simplified pseudospectral methods for computing ground state and dynamics of spherically symmetric Schrödinger–Poisson–Slater system (Dong 2011). Ehrhardt et al. presented a discrete transparent boundary condition for a Crank–Nicolson-type predictor–corrector scheme for solving the spherically symmetric SP system (Ehrhardt and Zisowsky 2006). Shaikh et al. performed three-dimensional nonlinear fluid simulations of electron fluid turbulence at nanoscales in an unmagnetized warm dense plasma by employing Fourier spectral method for solving the SP system (Shaikh and Shukla 2008). Combined with the Poisson solver, Mauser et al. proposed a backward Euler and a semi-implicit/leap-frog sine pseudospectral method in the computation of the ground state and dynamics of SP system (Mauser and Zhang 2014). Zheng investigated a perfectly matched layer approach for solving the nonlinear SP equations in unbounded domain (Zheng 2007). Lubich gave an error analysis of Strang-type splitting integrators for the SP equations with an \(H^4\)-regular solution and found a first-order error bound in the \(H^1\) norm and a second-order error bound in the \(L^2\) norm (Lubich 2008). Zhang presented optimal error estimates of compact finite difference discretizations for the SP system (Zhang 2013). We note that the SP system is sometimes called Schrödinger–Newton equations: the stationary spherical-symmetric case was investigated numerically in Harrison et al. (2003), Moroz et al. (1998) and Tan et al. (1990) and analytically in Tod and Moroz (1999).
For the mathematical analysis of the SP system, numerous research have been done (Bao et al. 2003; Castella 1997; Sulem and Sulem 1999). We name a few important works here: Ben Abdallah studied that the existence of weak solutions is shown for boundary value problems in the stationary and time-dependent regimes of Vlasov–Schrödinger–Poisson system (Ben 2000). Brezzi proved the existence of a unique, global classical solution of the quantum Vlasov–Poisson problem. The proof was based on a reformulation of the quantum Vlasov–Poisson problem as a system of countably many Schrödinger equations coupled to a Poisson equation for the potential (Brezzi and Markowich 1991). Castella studied existence, uniqueness, time behavior, and smoothing effects of the \(L^2\) solutions to the SP system (Castella 1997). Lange et al. showed the existence, uniqueness, and regularity of solutions of Wigner–Poisson problem and its associated SP system in various settings including periodic, stationary, and ‘mixed’ boundary value problems (Lange et al. 1995).
In this paper, we study the SP system numerically and propose a novel splitting Chebyshev collocation method for the time-dependant SP system. By means of splitting technique in time, the time-dependant SP system is first reduced to uncoupled linear Schrödinger and Poisson equations, respectively, at every time step. The space variables in the linear Schrödinger and Poisson equations are next represented by high-order Chebyshev polynomials and discretized by the spectral collocation method, and the resulting discretized system in one dimension, two dimensions and three dimensions can be solved efficiently by matrix diagonalization technique. The merits of the proposed method for the nonlinear SP system are that it is fast and unconditionally stable. Moreover the method is of spectral accuracy in space, and conserves the particle number and the energy of the system in the discretized level.
The paper is organized as follows. In Sect. 2, we review how to derive nonlinear Schrödinger–Poisson equations from the well-known Wigner–Poisson equation in quantum plasma and its dimensionless formulation. In Sect. 3, we propose a splitting Chebyshev collocation method for solving the time-dependent SP system. Detailed numerical algorithm for the Poisson equation and linear Schrödinger equation in one dimension (1D), two dimensions (2D) and three dimensions (3D) is provided in Sects. 4 and 5, respectively. Stability analysis for the proposed splitting Chebyshev collocation method has been provided in Sect. 7. Numerical results for the Poisson equation, linear Schrödinger equation, and the nonlinear SP system in 1D, 2D and 3D are presented in Sect. 8. Finally, some conclusions are drawn in final section.
2 Brief derivation of the nonlinear Schrödinger–Poisson system
Under the assumption of immobile ions, the Wigner–Poisson equations are often used to describe the collective electrostatic oscillations of electrons in quantum plasma (Haas et al. 2000; Manfredi and Haas 2001; Manfredi 2005; Shukla and Eliasson 2010; Shukla and Stenflo 2006; Shukla and Eliasson 2006, 2007; Wang and Lu 2014):
and
The above Wigner–Poisson equations are integral-differential equations and quite complicated. In the following discussion, we follow the procedure provided by Shukla and Eliasson (2010) and briefly review how Wigner–Poisson equations can be reduced to SP System.
If we respectively denote the density \(n_e\), mean velocity \(\mathbf{u_e}\), and pressure tensor \(\mathbf{P_e}\) by:
take the integral of Wigner equation (2.1) over \({\text {d}}{} \mathbf{v}\) (or multiply both sides of (2.1) by \(\mathbf{v}\) and the integral of the resulting equation over \({\text {d}}{} \mathbf{v}\) ) and assume the pressure \(\mathbf{P_e}\) is isotropic (=\(\mathbf{I} P_e \) with \(\mathbf{I}\) being the identity matrix), then we can get the quantum hydrodynamical equations [up to \(O(\hbar ^2)\)] as follows: the electron continuity equation
and the electron momentum equation
There are different expressions for \(P_e\), for the degenerate Fermi–Dirac-distributed plasma, the quantum statistical pressure for the electron applies:
where d is the number of degrees of freedom in the system. \(V_\mathrm{Fe}\) denotes the Fermi Velocity. While \(\mathbf{F}_Q\), the quantum force due to electron tunnelling is defined as
We introduce the wave function
where the phase function \(\varphi _e (\mathbf{x},t)\) is defined according to
and the density function \(n_e\) is defined as
It can be shown that the quantum hydrodynamical Eqs. (2.3)–(2.4) are equivalent to the following nonlinear SP system (Shukla and Eliasson 2010):
and
Introducing parameters
where \(\lambda _{\text {D}}=T_{\text {F}}/(4\pi n_0 e^2)^{1/2}\), \(T_{\text {F}}=C\hbar ^2 (n_0)^{2/3}/m_e\), \(C=\frac{(m_e)^2 V_\mathrm{Fe}^2}{2\hbar ^2} (n_0)^{5/3-2/d},\) and setting \(A= 4\pi m_e e^2/(\hbar ^2 n_0^{1/3})\), we get dimensionless SP equations after removing all \(\tilde{}\) :
where \(i^2=-1\), A is some constant.
System (2.10)–(2.11) has many conservation laws including:
the number of electrons
the electron momentum
and the total energy
3 A splitting Chebyshev collocation method
In this section, we present a splitting Chebyshev-collocation method for the SP system (2.10)–(2.11). In numerical computation, we truncate the problem into a bounded computational domain \(\Omega \) with homogeneous Dirichlet boundary conditions:
where \(\psi =\psi (\mathbf{x} ,t)\), \(\varphi =\varphi (\mathbf{x} ,t)\), \(\Omega =[a,b]\) in 1D, \(\Omega =[a,b]\times [c,d]\) in 2D, \(\Omega =[a,b]\times [c,d]\times [e,f]\) in 3D, with |a|, b, |c|, d, |e| and f sufficiently large. \(\partial \Omega \) is the boundary of \(\Omega \). \(V=V(\mathbf{x})\) is some given function that is added to account for more general setting.
We choose a time step size \(\tau =\Delta t>0\). For \(n=0,1,2,\ldots \), from time \(t=t_n=n\tau \) to \(t=t_{n+1}=t_n+\tau \), the system (3.1)–(3.2) may be solved by the following two splitting steps (Bao et al. 2003; Wang 2010):
Step 1 One solves first
for the time step of length \(\Delta t\) [here \(\varphi (\mathbf{x} ,t)\) is defined in Eq. (3.2)];
Step 2 Followed by solving
for the same time step. Symbolically, the system (3.1)–(3.2) here is solved in the following way:
In Step 1, multiplying Eq. (3.5) by the conjugate of \(\psi \), i.e., \(\bar{\psi }\), we get
Subtracting the conjugate of (3.8) from (3.8) and multiplying by \(-i\), one obtains
Solving (3.9), we find
Noticing that \(\varphi (\mathbf{x} ,t)\) is obtained from Poisson Eq. (3.2). When \(t \in [t_n, t_{n+1}]\), from Poisson Eq. (3.2) we can find that
Thus, substituting both (3.10) and (3.11) into (3.5), we obtain
Integrating the Eq. (3.12) from \(t_n\) to \(t_{n+1}\), we find for \(\mathbf{x} \in \Omega \) and \(t_n\le t \le t_{n+1}\)
In Eq. (3.13), we note that \(\varphi (\mathbf{x} ,t_n)\) satisfies the following Poisson equation
In Step 2, we first discretize the linear Schrödinger Eq. (3.6) with Chebyshev-collocation method, we then solve the resulting discretized system based on technique of matrix diagonalization.
In the next two sections, we show how to apply the Chebyshev-collocation method to solve Poisson Eq. (3.14) and linear Schrödinger Eq. (3.6), respectively. Once we have efficient solvers ready for Poisson equation and linear Schrödinger equation in hand, we can easily extend them to solve the SP system using the above splitting step (3.7).
We remark that the above splitting technique for the SP system (3.1)–(3.2) has only first-order accuracy in time. If we wish to solve the system (3.1)–(3.2) with second-order accuracy in time, we may solve it with the following second-order Strange splitting technique
4 The Chebyshev collocation method for Poisson equation
In this section, we show how to use Chebyshev collocation method to discretize the Poisson equation with homogeneous boundary conditions in 1D, 2D and 3D, respectively. We pay attention to how to efficiently solve the resulting discretized system with technique of diagonalization of matrix. Detailed numerical algorithm are provided in 2D and 3D, respectively. We show that the matrix diagonalization procedure can reduce the usual computational cost greatly in 2D and 3D.
4.1 The Chebyshev collocation method
In general, an unknown function u(x) defined on [a, b] can be expanded by Chebyshev polynomials as follows:
However, based on Chebyshev collocation spectral methods, for collocation points \(\bar{x}_j=\frac{a+b}{2}+\frac{b-a}{2}x_j\) (with \( x_j=\cos \frac{\pi j}{N}\), \(j=0,\ldots ,N\)), the above expansion can be reformulated into (Canuto et al. 1987)
where the polynomial \(h_j(x)\) is defined as
From Eq.(4.2), we get the pth derivative
Therefore, the p-th derivative \(u_N(x)\) at grid points \(\bar{x}_i\) is evaluated as
for all \(i=0,1,\ldots ,N\). Here we define \(d_{i,j}^{(p)}=h^{(p)}_j(x_i)\). When \(p=2\), \(d_{ij}^{(2)}\) is defined as (Peyret 2002)
where \(x_j=\cos (\pi j/N)\) (\(0\le j\le N\)). \(\bar{c}_0=\bar{c}_N=2\), \(\bar{c}_j=1\) for \(1\le j\le N-1.\) Hereafter, for shortness, we denote the element of \((N+1)\times (N+1)\) matrix D as
In the following subsection, we applied the Chebyshev-collocation method to solve Poisson equation in 1D, 2D and 3D, respectively.
4.2 Poisson equation in 1D
Let us consider the equation
If we consider grid points:
and assume that
Then, we have
By setting Eq. (4.8) to be valid at the inner collocation points \(\bar{x}_j,j=1,\ldots ,N-1\), and by adding the boundary conditions, we obtain the collocation equations:
They are equivalent to
where the constant \(\gamma =\frac{4}{(b-a)^2}\) and \( d_{mj}=h''_m\left( \frac{\bar{x}_j-\frac{a+b}{2}}{\frac{b-a}{2}}\right) \) (\( m,j=1,\ldots , N-1\)).
From the above system (4.12), we can rewrite it into matrix formulation
where \(U=(u(x_1),\ldots ,u(x_{N-1})^{\text {T}}\), I is the \((N-1)\times (N-1)\) identity matrix, and the \((N-1)\times (N-1)\) matrix \(D=\left( d_{mj}\right) \) (\(1\le m, j\le N-1 \)). From the linear system (4.13), we can easily get the approximation \(U=-(\gamma D)^{-1}F\).
4.3 Poisson equation in 2D
In this subsection, we will present the Chebyshev collocation approximation to the two-dimensional Poisson equation with Dirichlet boundary conditions:
where \(\Omega \) is the square \((a,b)\times (c,d)\). \(\Gamma =\partial \Omega \) is its boundary.
The Chebyshev collocation approximation to the problem makes use of the Gauss-Lobatto mesh \(\bar{\Omega }_N\) defined by
Therefore, grid points are defined as (\(\bar{x}_{j},\bar{y}_{k}\)) where \( j=0,1,2,\ldots ,N_x\), \(k=0,1,2,\ldots ,N_y\). In addition, \(u_{jk}\) are denoted as approximation of u(x, y) at grid points, i.e., \(u_{jk}\approx u(\bar{x}_{j},\bar{y}_{k})\).
If we use the spectral collocation methods, then Eq. (4.14) can be approximated by
where
Furthermore, Eq. (4.15) can be reduced to
Here the constants \(\gamma _x=\frac{4}{(b-a)^2}\), \(\gamma _y=\frac{4}{(d-c)^2}\). In addition, let \(D_x=(d^x_{mj})\) and \(D_y=(d^y_{nk})\). They are the matrices of dimension \( ({N}_x-1)\times ({N}_x-1)\), \( ({N}_y-1)\times ({N}_y-1)\), respectively.
and
By means of tensor product \(\bigotimes \), Eq. (4.17) can be reformulated into
where \(I_x\) and \(I_y\) are the identity matrices of dimension \( ({N}_x-1)\times ({N}_x-1)\), \( ({N}_y-1)\times ({N}_y-1)\), respectively.
However, the above linear system (4.20) becomes extremely large when grid numbers \(N_x\) and \(N_y\) grow large. In such case, one does not seek to solve the linear system (4.20) directly as the computation cost is unendurable. In the following, we first rewrite Eq. (4.17) into
where U is the matrix of dimension \( ({N}_x-1)\times ({N}_y-1)\) made with the inner unknowns, that is,
Here, using the technique of diagonalization of matrix, we can reduce the system (4.21) to a sequence of uncoupled equations. In fact, it is possible to rewrite \(D_x\) and \(D_y\) as
where \(\Lambda _x,\Lambda _y\) are composed by the eigenvalues of \(D_x,D_y\) respectively; while P, Q are composed by the eigenvectors of \(D_x,D_y\), respectively. then we have
where \(\tilde{U}=P^{-1}U, \tilde{H}=P^{-1}H\). we can also have if introduce \(\hat{U}=\tilde{U}(Q^{\text {T}})^{-1}\), \(\hat{H}=\tilde{H}(Q^{\text {T}})^{-1}\):
Therefore, if we define matrices \(\hat{U}=\left( \hat{u}_{j,k}\right) \), \(\hat{H}=\left( \hat{h}_{j,k}\right) \), \(\Lambda _x={\text {diag}}\) \((\lambda _{x,j}\), \(j=1,2\),\(\ldots , N_x-1)\), \(\Lambda _y={\text {diag}} \left( \lambda _{y,k},,k=1,2,\ldots , N_y-1\right) \), then Eq. (4.25) simply gives
for \(j=1,\ldots ,\bar{N}_x, k=1,\ldots ,\bar{N}_y\) (where \(\bar{N}_x={N}_x-1\),\(\bar{N}_y={N}_y-1\)). Finally, we can get the following algorithm for solving (4.14):
-
(1)
Do the factorization \(D_x=P\Lambda _xP^{-1}\), \(D_y=Q\Lambda _xQ^{-1}\);
-
(2)
Let \(H=\left( \begin{array}{llll} f(x_1,y_1) &{} f(x_1,y_2) &{} \cdots &{} f(x_1,y_{\bar{N}_y}) \\ f(x_2,y_1) &{} f(x_2,y_2) &{} \cdots &{} f(x_2,y_{\bar{N}_y}) \\ \cdots &{} \cdots &{} \cdots &{} \cdots \\ f(x_{\bar{N}_x},y_1) &{} f(x_{\bar{N}_x},y_2) &{} \cdots &{} f(x_{\bar{N}_x},y_{\bar{N}_y}) \end{array} \right) .\)
-
(3)
Compute \(\hat{H}=P^{-1}H(Q^{\text {T}})^{-1}\);
-
(4)
Calculate \(\hat{U}\) from Eq. (4.26);
-
(5)
Get the approximation \(U=P\hat{U}Q^{\text {T}}\).
In the case that \(N_x=N_y\equiv N\), the above algorithm will need \(O(N^3)\) operations, while solving the linear system (4.20) directly usually need \(O(N^4)\) operations.
4.4 Poisson equation in 3D
In this section, we will take the Chebyshev collocation approximation to the three-dimensional Poisson equation with Dirichlet boundary conditions:
where \(\Omega \) is the square \((a,b)\times (c,d)\times (e,f)\). \(\Gamma =\partial \Omega \) is its boundary.
The Chebyshev collocation approximation to the problem takes the Gauss–Lobatto mesh \(\bar{\Omega }_N\) defined by
As previously, we denote \(\Omega _N\) the open discretized domain. The inner grid points considered are \(\{\bar{x}_j,\bar{y}_k,\bar{z}_l|j=1,\ldots ,\bar{N}_x,k=1,\ldots ,\bar{N}_y,l=1,\ldots ,N_z \}\), where \(\bar{N}_x=N_x-1\), \(\bar{N}_y=N_y-1\), \(\bar{N}_z=N_z-1\).
The solution of (4.27)–(4.28) is approximated with the polynomial \(u_N(x,y,z)\) of degree at most equal to \(N_x\), \(N_y\), and \(N_z\), in the x-, y-, z-directions, respectively. If we use the spectral collocation methods, then Eq. (4.27) can be approximated by
where
The derivatives are approximated with the usual expressions. First, the Eq. (4.27) are forced to be satisfied by the polynomial \(u_N(x,y,z)\) at every inner collocation point \((\bar{x}_j, \bar{y}_k, \bar{z}_l)\in \Omega _N \). The boundary condition (4.28) is prescribed to zero at every outer collocation points \((\bar{x}_j,\bar{y}_k,\bar{z}_l)\). We may also write the resulting algebraic system under the tensor product form:
where V is the column vector of inner unknowns ordered by row and horizontal section. More precisely, here, we first introduce the \(\bar{N}_x\)-component vector \(V_{j,k}\):
for \(k=1,\ldots ,\bar{N}_y\), \(l=1,\ldots ,\bar{N}_z\). secondly we define the \(\bar{N}_x\bar{N}_y\)-component vector \(V_k\) by
and finally, V is the \(\bar{N}_x\bar{N}_y\bar{N}_z\)-component vector \(V_k\) by
\(D_x\), \(D_y\), \(D_z\) are square matrices of dimensions \(\bar{N}_x\times \bar{N}_x\),\(\bar{N}_y\times \bar{N}_y\), \(\bar{N}_z\times \bar{N}_z\), respectively, analogously to the matrix D defined in the one-dimension case; \(I_x\), \(I_y\), \(I_z\) are identity matrices in the x-, y- and z-directions having the same dimensions as \(D_x\), \(D_y\), \(D_z\). Lastly, H is the \(\bar{N}_x\bar{N}_y\bar{N}_z\)-component vector constructed in the same way as V, but with component \(h_{i,j,k}\) calculated from the inner values of function f and the values of function g.
As we can see from the resulting linear system (4.30), generally there will have a very large system \(AV=B\) to be solved. For the larger system, often direct solution methods will not be recommended when they are too costly, i.e., concerning computing time or memory requirements. Iterative procedures constitute an alternative to direct methods, especially in three-dimensional problems. Some usual iterative methods are discussed for the solution of linear algebraic systems arising from Chebyshev collocation approximations (Canuto et al. 1987).
We use the technique of diagonalization of matrix again to reduce the overall computation cost. In fact, Eq. (4.29) can be written as
where \(\gamma _z=\frac{4}{(f-e)^2}\).
For shortness, in the following, we assume that \(N_x=N_y=N_z=N\) and use repeated summation or Einstein summation (Shen 2006) and the above system can be reduced to
In addition, for \(D=(d_{mj}),j,m=1,\ldots ,N-1\), we have \(D=P\Lambda P^{-1}\) or \(DP=P\Lambda \) or \(d_{mj}e_{jq}=\lambda _qe_{jq}\) and \(e_{jq}e_{jp}=\delta _{qp}\). If setting
then we can obtain from Eq. (4.35)
Multiplying the above equation by \(e_{jq}\) gives
where \(v^q=(v_{qjk})\), \(F^q=(F_{qkl}),j,k=1,\ldots ,N-1. \)
For fixed q, the structure of Eq. (4.39) is similar to those of Eq. (4.21). Thus, we can get get an efficient solver. The full algorithm for the problem (4.27) is summarized as follows:
-
(1)
Do pre-processing, compute the eigenvalues and eigenvector of D and get \( D=P\Lambda P^{-1} \) with \(\Lambda =diag(\lambda _1,\lambda _2,\ldots ,\lambda _{N-1})\) and \(D=(e_{nl}) ,n,l=1,\ldots ,N-1 \);
-
(2)
Compute \(F_{qkl}=e_{jq}f_{qkl}\) for all \(j,k,l,q=1,\ldots ,N-1\);
-
(3)
Obtain \(v^q\) from Eq. (4.39);
-
(4)
Set \(u_{jkl}=e_{jq}v_{qkl}\) for all \(j,k,l,q=1,\ldots ,N-1.\)
In the case that \(N_x=N_y=N_z\equiv N\), we remark that the above algorithm takes about \(O(N^4)\) operations. In fact, in step (2), it takes about \(2N^4\) operations. The step (1) and (3) take \(2N^4\) operations. Moreover, in (4.39) we only need to solve \(N-1\) two-dimensional equations of the form [see Eq. (4.21) for reference]. However, solving the linear system (4.30) directly usually need \(O(N^6)\) operations.
5 The Chebyshev collocation method for linear Schrödinger equation
In this section, we present the detailed algorithm on the Chebyshev collocation method for solving the linear Schrödinger equation in 1D, 2D and 3D, respectively.
5.1 Schrödinger equation in 1D
In 1D, we are going to solve the following one-dimentional Schrödinger equation with the chebyshev-collocation method
along with homogeneous boundary conditions and given initial data. We assume the expansion
Plugging Eq. (5.2) into Eq. (5.1), we get
In Eq. (5.3), if we let Eq. (5.3) is exact at \(x=\bar{x}_k, k=1,\ldots ,N-1\), we obtain
Equation (5.4) can be reformulated into the following matrix form
where we define \(U=U(t)=(\psi (x_1,t),\psi (x_2,t),\ldots ,\psi (x_{N-1},t))\) and D is defined in (4.7). Since D can be factorized into \(D=P \Lambda P^{-1}\), Eq. (5.5) can then be rewritten as
If we let \(\tilde{U}=P^{-1}U\), then we get
Noticing that the diagonal matrix \(\Lambda ={\text {diag}}(\lambda _1,\lambda _2,\ldots ,\lambda _{N-1})\), we find
where \(\tilde{U}=P^{-1}U=(\tilde{U}_1(t),\tilde{U}_2(t),\ldots ,\tilde{U}_N(t))^{\text {T}}\).
Solving (5.7) gives us
So
where \(t_n=n\triangle t, n=0,1,\ldots ,M\) with \(\triangle t =\frac{T}{M}\).
Then, we get the following algorithm for solving the Schrödinger equation (5.1):
-
(1)
Do the factorization \(D=P\Lambda P^{-1}\). Let \(n=0\);
-
(2)
Compute \(\tilde{U}(t_n)=P^{-1}U(t_n)\);
-
(3)
Calculate \(\tilde{U}_j(t_{n+1})=e^{i \frac{\gamma }{2}\lambda _j\triangle t}\tilde{U}_j(t_n),j=1,\ldots ,N-1\);
-
(4)
Get \(U(t_{n+1})=P\tilde{U}(t_{n+1})\);
-
(5)
Let \(n=n+1\) and repeat steps (2)–(4) until \(n=M\) ( the final time step).
5.2 Schrödinger equation in 2D
In 2D, we solve the following linear Schrödinger equation
According to the Chebyshev-collocation method, we have the expansion
Then, Eq. (5.10) can be discretized as
Because we can do matrix factorization as follows:
we find
where we define \((N_x-1)\times (N_y-1)\) matrix \(U=(u_{jk}(t))\). Multiplying the above equation with matrices \(P^{-1}\) and \((Q^{\text {T}})^{-1}\), we get
If we define an \((N_x-1)\times (N_y-1)\) matrix \(\tilde{U}\) and let \(\tilde{U}=P^{-1}U(Q^{\text {T}})^{-1}\), then
i.e.,
for all j, k. Solving the above equation over \([t_n,t_{n+1}\) gives us immediately
Finally, we get the following algorithm for solving Schrödinger equation (5.10):
-
(1)
Find matrices \(P,\Lambda _x, Q,\Lambda _y \) such that \(D_x=P\Lambda _xP^{-1}\), \(D_y=Q\Lambda _yQ^{-1}\). Starting \(n=0\);
-
(2)
Compute
$$\begin{aligned} U(t_n)=\left( \begin{array}{llll} u(x_1,y_1,t_n) &{} u(x_1,y_2,t_n) &{} \cdots &{} u(x_1,y_{N_y-1},t_n) \\ u(x_2,y_1,t_n) &{} u(x_2,y_2,t_n) &{} \cdots &{} u(x_2,y_{N_y-1},t_n) \\ \cdots &{} \cdots &{} \cdots &{} \cdots \\ u(x_{N_x-1},y_1,t_n) &{} u(x_{N_x-1},y_2,t_n) &{} \cdots &{} u(x_{N_x-1},y_{N_y-1},t_n) \end{array} \right) ; \end{aligned}$$ -
(3)
Evaluate \(\tilde{U}(t_n)=P^{-1}U(t_n)(Q^{\text {T}})^{-1}\);
-
(4)
Calculate \(\tilde{u}_{jk}(t_{n+1})=e^{\frac{i}{2}(\gamma _x\lambda _{xj}+\gamma _y\lambda _{yk})\triangle t}\tilde{u}_{jk}(t_n)\), \(j=1,\ldots ,N_x-1\), \(k=1,\ldots ,N_y-1 \).
-
(5)
Compute \(U(t_{n+1})=P\tilde{U}(t_{n+1})Q^{\text {T}} \);
-
(6)
Let \(n=n+1\) and repeat steps (3)–(5) until \(n=M\) (the final time step).
5.3 Schrödinger equation in 3D
In 3D, we solve the following linear Schrödinger equation
According to the Chebyshev-collocation method, we have the expansion
Plugging the above equation into Eq. (5.16), we get
where repeated index is assumed and \(\psi _{jkl}=\psi _{jkl}(t)\) is defined as the approximation of \(\psi (x,y,z,t)\) at grid points \((\bar{x}_j,\bar{y}_k,\bar{z}_l,t)\). \(\psi ^n_{jkl}=\psi _{jkl}(t)\) is defined as the approximation of \(\psi (x,y,z,t)\) at grid points \((\bar{x}_j,\bar{y}_k,\bar{z}_l,t_n)\)
For shortness, we assume that \(N_x=N_y=N_z=N\) and use repeated summation in the following discussion. If we let
similarly we reduce Eq. (5.17) into
where the matrix \(V^q=(\psi _{qkl})\). We are now faced with \(N_x-1\) decoupled equations whose structure is similar to Eq. (5.13). Thus, we again use the technique of matrix diagonalization which have been used to solve Eq. (5.13) efficiently. Finally, we can get a more efficient algorithm for the Eq. (5.16):
-
(1)
Starting from \(n=0\). Find matrices D and \(\Lambda \) such that \( D=P\Lambda P^{-1} \) with \(\Lambda ={\text {diag}}(\lambda _1,\lambda _2,\ldots ,\lambda _{N-1})\) and \(D=(e_{nl}) ,n,l=1,\ldots ,N-1. \)
-
(2)
Set \(V_{jkl}=(e_{jq}\psi ^n_{qkl})\) for all \(j,k,l=1,\ldots ,N-1\);
-
(3)
Obtain \(V^q(t_{n+1})\) from \(V^q(t_{n})\) by solving Eq. (5.19) using the similar algorithm provided in Sect. 5.2.
-
(4)
Compute \(\psi ^{n+1}_{jkl}=e_{jq}V^n_{qkl}\) for all \(j,k,l=1,\ldots ,N-1\);
-
(5)
Let \(n=n+1\) and repeat steps (2)–(4) until \(n=M\) (the final time step).
6 Stability analysis of the splitting Chebyshev-collocation method for the SP system
In Sect. 3, we gave the general idea of the first-order splitting method (3.7) on how to solve the SP system (2.10)–(2.11). In the numerical procedure, the key step to solve the SP system (2.10)–(2.11) from \(t_n\) to \(t_{n+1}\) is solving both Poisson equation and time-dependent linear Schrödinger equation. We now have efficient numerical algorithms ready for both the Poisson equation and the linear Schrödinger equation (presented in Sects. 4 and 5, respectively), thus it is easy for us to extend them to solve the SP system (2.10)–(2.11) numerically. We now give stability analysis of the presented splitting Chebyshev-collocation method in 1D, we note that stability analysis of the proposed method for the higher-dimensional SP system is similar.
Lemma 6.1
If we define the discrete weighted \(L^2\) norm at time \(t_n\) as \(||\Psi ^n||=\sqrt{\frac{(b-a)\pi }{2N} \sum _{j=1}^{N-1}|\psi (x_j,t_n)|^2}\), then we have
Proof 6.1
Starting from the continuous weighted norm
where the weighted function \(\omega (x)=1/\sqrt{1-x^2}\) and discretizing it with the Chebyshev–Gauss–Lobatto quadrature, we get
where \(w_j=\left\{ \begin{array}{cc} \frac{\pi }{2N} &{} j=0\; \mathrm{or } \; N \\ \frac{\pi }{2N} &{} 1\le j \le N-1 \end{array} \right. \). The derivation gives us the reason why we define the discrete weighted \(L^2\) norm (6.2).
In the first step of splitting step (3.7), we solve the nonlinear equation exactly, i.e.,
It is obvious to see that \(||\psi ^{n+1}||_w\) is equal to \(||\psi ^{n}||_w\) in this step.
In the second step of splitting step (3.7), i.e., solving the linear Schrödinger equation with Chebyshev-collocation method, we need to solve from \(t_n\) to \(t_{n+1}\)
From which, we find \(U(t_{n+1})=P \Theta P^{-1} U(t_{n})\) where the diagonal matrix \(\Theta =diag\left( e^{-\frac{\gamma \lambda _1 \triangle t }{2}}, \ldots , e^{-\frac{\gamma \lambda _N \triangle t }{2}} \right) \).
Hence we get
From Eq. (6.3) , we immediately get Eq. (6.1), which concludes our proof. \(\square \)
From this lemma, we find that the proposed method is unconditionally stable.
7 Numerical results
In this section, we first test numerical accuracy of the proposed Chebyshev collocation method for Poisson equation in 1D, 2D, and 3D, respectively. We next test numerical accuracy of the proposed Chebyshev-collocation method for the linear Schrödinger equation in 1D, 2D, and 3D, respectively. Finally, we apply the newly proposed splitting Chebyshev-collocation method to solve the SP system.
7.1 Numerical results for Poisson equation
We first consider
where the one-dimensional Poisson equation admits an exact solution \(u(x) = 1-x^2\). We solve the equation with our proposed algorithm presented in Sect. 4. Table 1 shows us the numerical accuracy test.
We next consider
where the two-dimensional Poisson equation admits an exact solution \(u(x,y)=(1-x^2)(1-y^2)\). We solve the equation with our proposed algorithm presented in Sect. 4. Table 2 shows us the numerical accuracy test.
We finally consider
where \(f(x,y,z)=-\,2[(1-y^2)(1-z^2)+(1-x^2)(1-z^2)+(1-x^2)(1-y^2)]\), the three-dimensional Poisson equation admits an exact solution \(u(x,y,z)=(1-x^2)(1-y^2)(1-z^2)\). We solve the equation with our proposed algorithm presented in Sect. 4. Table 3 shows us the numerical accuracy test.
Tables 1, 2 and 3 show us that the proposed Chebyshev-collocation method for Poisson equation has spectral accuracy.
7.2 Numerical results for the linear Schrödinger equation
In the first example, we consider one-dimensional problem with zero Dirichlet boundary conditions
where the exact solution to problem is
Numerical result at time \(t=1\) is shown in Table 4.
In the second example, we consider the two-dimensional problem with zero Dirichlet boundary conditions
where the exact solution to this problem is
Numerical result at time \(t=1\) is shown in Table 5.
In the third example, we consider the three-dimensional problem with zero Dirichlet boundary conditions
where the exact solution to this problem is
Numerical result at time \(t=0.5\) is shown in Table 6.

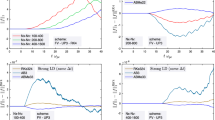
Time evolution of the norm N(t), moment P(t) and energy E(t)

Density function \(|\psi (x,t)|\) at different times: a \(t=2.5\); b \(t=5\); c \(t=7.5\); d \(t=10\)

Time evolution of the norm N(t), moment in x-direction \(P_x(t)\), moment in y-direction \(P_y(t)\) and energy E(t)

Density function \(|\psi (x,y,t)|\) at different times: a \(t=2.5\); b \(t=5\); c \(t=7.5\); d \(t=10\)

Time evolution of the norm N(t), moment in x-direction \(P_x(t)\), moment in y-direction \(P_y(t)\), moment in z-direction \(P_z(t)\) and energy E(t)

Density function \(|\psi (0,y,z,t)|\) at different times: a \(t=5\), c \(t=10\); density function \(|\psi (x,y,0,t)|\) at different times: b \(t=5\), d \(t=10\)
Tables 4, 5 and 6 show us that the proposed Chebyshev-collocation method for linear Schrödinger equation has spectral accuracy in space.
7.3 Numerical results for the Schrödinger–Poisson system
We now apply the newly proposed splitting Chebyshev collocation method presented in Sect. 3 to solve the SP system in 1D, 2D and 3D, respectively.
We first solve one-dimensional SP system (3.1)–(3.2) over [a, b], where \(a=-8,b=8,T=1\), \(V=V(x)=\frac{1}{2}x^2\), and the initial data \(\phi _{0}(x)=\frac{1}{(2\pi )^{\frac{1}{4}}}e^{\frac{-x^{2}}{4}}x\).
Figure 1 shows us the time evolution of the norm N(t), moment P(t) and energy E(t). From this figure, we find that the proposed splitting Chebyshev-collocation method keeps well the conservation laws of the SP system in 1D. Figure 2 shows us the density function \(|\psi (x,t)|\) at different times.
We next solve two-dimensional SP system (3.1)–(3.2) over \([a,b]\times [c,d]\), where \(a=c=-8, b=d=8\), \(V=V(x,y)=\frac{1}{2}(x^2+y^2)\) and the initial data \(\phi _{0}(x,y)=\frac{1}{\sqrt{2\pi }}e^{\frac{-(x^{2}+y^{2})}{4}}(x+iy)\).
Figure 3 gives us the time evolution of the norm N(t), moment in x-direction \(P_x(t)\), moment in y-direction \(P_y(t)\) and energy E(t). From this figure, we observe that the proposed splitting Chebyshev-collocation method keeps well the conservation laws of the SP system in 2D. Figure 4 shows us the density function \(|\psi (x,y,t)|\) at different times.
Finally, we solve three-dimensional SP system (3.1)–(3.2) over \([a,b]\times [c,d]\times [e,f]\), where \(a=c=e=-8, b=d=f=8\), \(V=V(x,y,z)=\frac{1}{2}(x^2+y^2+z^2)\) and the initial data \(\phi _{0}(x,y,z)=\frac{1}{(2\pi )^{3/4}}e^{\frac{-(x^{2}+y^{2}+z^2)}{4}}(x+iy)\).
Figure 5 gives us the time evolution of the norm N(t), moment in x-direction \(P_x(t)\), moment in y-direction \(P_y(t)\), moment in z-direction \(P_z(t)\) and energy E(t). From this figure, we observe that the proposed splitting Chebyshev-collocation method keeps well the conservation laws of the SP system in 3D. Figure 6 shows us the density function \(|\psi (x,0,z,t)|\) and \(|\psi (x,y,0,t)|\) at different times.
8 Conclusions
We proposed a splitting Chebyshev collocation method for the time-dependent Schrödigner–Poisson system. The method can be efficiently implemented by means of matrix diagonalization technique. Because of its flexibility, it could be extended to solve many other nonlinear Schrödigner equations with nonzero boundary conditions and variable coefficients. The newly proposed method not only achieve spectral accuracy in space but also significantly reducing the computer-memory requirements and lowering the computational time in comparison with conventional solver for the fully discretized system. Our numerical results on the effectiveness of the method show that it might be used to predict future experiments on the dynamics of quantum electron plasma.
References
Anderson D et al (2002) Statistical effects in the multistream model for quantum plasmas. Phys Rev E 65:046417
Becker KH, Schoenbach KH, Eden JG (2006) Microplasmas and applications. J Phys D 39:R55
Bao W, Mauser NJ, Stimming HP (2003) Effective one particle quantum dynamics of electrons: a numerical study of the Schrödinger–Poisson-\(\Xi \alpha \) model. Comm Math Sci 1:809–831
Abdallah N Ben (2000) On a multidimensional Schrödinger–Poisson scattering model for semiconductors. J Math Phys 41(7):4241–4261
Brezzi F, Markowich PA (1991) The three-dimensional Wigner–Poisson problem: existence, uniqueness and approximation. Math Meth Appl Sci 14:35–61
Canuto C, Hussaini MY, Quarteroni A, Zang TA (1987) Spectral methods in fluid dynamics. Springer, Berlin
Cheng C, Liu Q, Lee J, Massoud HZ (2004) Spectral element method for the Schrödinger–Poisson system. J Comput Electron 3:417–421
Castella F (1997) \(L^2\) solutions to the Schrödinger–Poisson system: existence, uniqueness, time behavior, and smoothing effects. Math Mod Meth Appl Sci 7:1051–1083
Dong X (2011) A short note on simplified pseudospectral methods for computing ground state and dynamics of spherically symmetric Schrödinger–Poisson-Slater system. J Comput Phys 230:7917–7922
Ehrhardt M, Zisowsky A (2006) Fast calculation of energy and mass preserving solutions of Schrödinger–Poisson systems on unbounded domains. J Comput Appl Math 187:1–28
Harrison R, Moroz IM, Tod KP (2003) A numerical study of Schrödinger–Newton equations. Nonlinearity 16:101–122
Haas F, Manfredi G, Feix M (2000) Multistream model for quantum plasmas. Phys Rev E 62:2763
Haas F (2003) Quantum ion-acoustic waves. Phys Plasmas 10:3858–3866
Lange H, Toomire B, Zweifel PF (1995) An overview of Schrödinger–Poisson Problems. Rep Math Phys 36:331–345
Lubich C (2008) On splitting methods for Schrödinger–Poisson and cubic nonlinear Schrödinger equations. Math Comput 77:2141–2153
Mauser NJ, Zhang Y (2014) Exact artificial boundary condition for the Poisson equation in the simulation of the 2D Schrödinger–Poisson system. Commun Comput Phys 16:764–780
Manfredi G, Haas F (2001) Self-consistent fluid model for a quantum electron gas. Phys Rev B 64:075316
Manfredi G (2005) How to model quantum plasmas. Fields Inst Commun 46(263):2005
Markowich PA, Ringhofer CA, Schmeiser C (1990) Semiconductor equations. Springer, Berlin
Moroz I, Penrose R, Tod P (1998) Spherically-symmetric solutions of the Schrödinger–Newton equations. Class Quantum Grav 15:2733–2742
Opher M, Silva LO, Dauger DE, Decyk VK, Dawson JM (2001) Nuclear reaction rates and energy in stellar plasmas: the effect of highly damped modes. Phys Plasmas 8:2454–2460
Peyret R (2002) Spectral methods for incompressible viscous flow. Springer, New York
Shaikh D, Shukla PK (2008) 3D electron fluid turbulence at nanoscales in dense plasmas. New J Phys 10(083007):1–7
Shen J (2006) Efficient spectral-Galerkin method II. direct solvers of second- and fourth-order equations using Chebyshev polynomials. SIAM J Sci Comput 16:74–87
Shukla PK, Eliasson B (2010) Nonlinear aspects of quantum plasma physics. Phys Usp 53:51–76
Shukla PK, Stenflo L (2006) Stimulated scattering instabilities of electromagnetic waves in an ultracold quantum plasma. Phys Plasmas 13:044505
Shukla PK, Eliasson B (2007) Nonlinear interactions between electromagnetic waves and electron plasma oscillations in quantum plasmas. Phys Rev Lett 99:096401
Shukla PK, Eliasson B (2006) Formation and dynamics of dark solitons and vortices in quantum electron plasmas. Phys Rev Lett 96:245001
Sulem C, Sulem PL (1999) The nonlinear Schrödinger equation: self-focusing and wave collapse. Springer, Berlin
Tan IH, Snider GL, Chang LD, Hu EL (1990) A self-consistent solution of Schrödinger–Poisson equations using a nonuniform mesh. J Appl Phys 68:4071–4076
Tod P, Moroz IM (1999) An analytical approach to the Schrödinger–Newton equations. Nonlinearity 12:201–216
Zhang Y (2013) Optimal error estimates of compact finite difference discretizations for the Schrödinger–Poisson system. Commun Comput Phys 13:1357–1388
Zhang Y, Dong XC (2011) On the computation of ground state and dynamics of Schrödinger–Poisson–Slater system. J Comput Phys 230:2660–2676
Zheng C (2007) A perfectly matched layer approach to the nonlinear Schrödinger wave equations. J Comput Phys 227:537–556
Wang Y, Lu X (2014) Modulational instability of electrostatic acoustic waves in an electron-hole semiconductor quantum plasma. Phys Plasma 21:022107
Wang H (2010) An efficient Chebyshev–Tau spectral method for Ginzburg–Landau–Schrödinger equations. Comput Phys Commun 181:325–340
Acknowledgements
The research of Z. Liang is supported in part by the Natural Science Foundation of China under Grant nos. 11371097, 11571249. The research of H. Wang is supported in part by the Natural Science Foundation of China under Grant no. 91430103.
Author information
Authors and Affiliations
Corresponding author
Additional information
Communicated by Pierangelo Marcati.
Rights and permissions
About this article

Cite this article
Wang, H., Liang, Z. & Liu, R. A splitting Chebyshev collocation method for Schrödinger–Poisson system. Comp. Appl. Math. 37, 5034–5057 (2018). https://doi.org/10.1007/s40314-018-0616-4
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40314-018-0616-4