
Abstract
In a typical power system network, transmission losses are considered as one of the important parameters for economic operation. To concern this problem, researchers have proposed many techniques to minimize the transmission losses based on the cost benefit analysis which is associated with the optimal placement of the reactive power sources. In the present work, a novel technique, namely oppositional crow search algorithm (CSA), is proposed for Var planning by utilizing the fuzzy logic technique to determine capacitor placement positions. In this approach, fuzzy membership value is calculated based on the loss sensitivity factor of each bus of the test networks. Then, shunt capacitors placement positions are assigned to buses having the higher membership values. Once the capacitor placement positions are evaluated, the CSA and oppositional CSA are executed to obtain the optimal setting of transformer tap positions, reactive power generation of the generators, and magnitude of shunt capacitors placed at the weak nodes. The proposed method is performed on standard IEEE 30 and IEEE 57 bus networks, and the obtained results are compared with several other established methods for Var planning. From the obtained results, it is found that the proposed method shows better performance when compared to other techniques suggested in the literature in terms of reduced active power loss and system operating cost.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
1.1 General
In a typical power system network, transmission losses accounts to 5–10% of the total power generation (Outlook, 2010). Thereby, reactive power planning (RPP) problem is measured as one of the challenging tasks for the power system operators in providing efficient, secure, and healthy dispatch of reactive power. The effective and co-ordinated planning of reactive power sources helps in the drastic reduction in active power loss by improving voltage profile of the power system network. The planning problem involves the determination of location and size of the additional Var sources required at the weak nodes in addition to the existing Var sources present in the network. The weak bus provides significant information regarding where voltage collapse appears in severe contingency cases and where reactive power sources needs to be installed in order to reduce active power losses and operating cost of the system.
1.2 Literature Review
In the current scenario of interconnected power systems, the system increased transmission loss and congestion of power lines are due to enhanced power demand, unscheduled power flow and curtailment in the extension of transmission lines. Thereby, to restore system stability margins to previously existing circuits and retain efficient power system operation, reactive power control and planning is extremely crucial. The challenges of RPP involve the decision of exact location and amount of reactive power sources where the objectives are to reduce the transmission loss and optimize the cost of Var sources. The optimal RPP encompasses voltage quality, economic operation, and reduction in system losses.
Fuzzy-based approach for reactive power control has been presented in Abdul-Rahman and Shahidehpour (1993) where fuzzy membership values of loss sensitivity of each bus are determined. Reactive power compensation at some selected buses based on fuzzy membership values of loss sensitivity would improve the voltage profile of the system as claimed by the authors. Heuristics techniques are also applied in Mantovani and Garcia (1996) for reactive power optimization. A methodology for RPP in a large-scale distribution system by the allocation of shunt capacitors has been studied in Chiang et al., (1990a, 1990b). The impacts of genetic algorithm (GA) have been used in Ghose et al., (1999) and Miu et al., (1997) for the optimal allocation of shunt capacitors in the distribution network. The application of GA-based optimal RPP has been also described in Lai and Ma (1997). Again, in addition to GA, the linear programming approach for Var planning has been also discussed in Gudadappanavar and Mahapatra (2021) and Lee et al., (1998). The determination of weak nodes of an interconnected power network plays a key role in optimal Var planning (Raj & Bhattacharyya, 2016). Modal analysis method has been presented in Gao et al., (1992) for the evaluation of voltage stability. Weak bus-oriented RPP for the improved system security has been presented in Chen (1996). GA, differential evolution (DA) and particle swarm optimization (PSO)-based optimization methods are used by the authors in Bhattacharyya and Goswami (2007) for the optimal planning of reactive power sources which reduces active power loss and overall system operating cost. RPP considering the voltage stability problem has been addressed by the authors in Chattopadhyay and Chakrabarti (2002). A modified interior point method for optimal reactive power control has been presented in Zhu and Xiong (2003). The chance constrained programming has been used by the authors for RPP in Parida et al., (2008) and Yang et al., (2007) considering power system security. Operation strategy for reducing the system loss and improvement of voltage profile has been discussed by the authors in Zhu et al., (2010). The loss sensitivity of buses has been used as an index for determining weak buses of the system and is chosen as the candidate buses for shunt capacitor allocation in Bhattacharyya et al., (2009). The optimal planning of these shunt capacitors along with transformer tap setting positions and reactive generation of generators is made using different evolutionary algorithms. Reactive power/voltage control problem under uncertain environment has been discussed in Viswanadha Raju and Bijwe (2008). The covariance matrix is developed by authors and evolutionary programming incorporating covariance matrix has been used in Jeyadevi et al., (2011) for RPP considering voltage stability. LP-based method for the optimal allocation of reactive power sources has been presented in Jabr (2011). Iterative solution approaches for optimal planning of Var sources are presented in Lin and Horng (2012). Algorithmic and heuristic approaches are hybridized and a new methodology for voltage and reactive power control has been presented in Bie et al., (2006). PSO and other variants of PSO-based algorithms are tested for RPP in Bhattacharyya and Raj (2016). A recently developed teaching learning-based optimization method has been applied for RPP in Bhattacharyya and Babu (2016). Authors have used oppositional-based grey wolf optimization techniques for the solution of the Var planning problem in Raj and Bhattacharyya (2018). In Mahapatra et al., (2021), Harris hawk optimization technique is suggested for reducing transmission losses by optimal allocation of shunt compensator. DE algorithm has been discussed in Abou El Ela et al., (2011) for optimal setting of control variables for optimal reactive power dispatch (OPRD) such that losses are minimized, voltage profile improved, and stability of the system is enhanced. This work has been extended in Duman et al., 2012) by considering the transformer tap settings using gravitational search algorithm (GSA). Further, to enhance the convergence ability of GSA, oppositional-based gravitational search algorithm (OGSA) has been proposed to ORPD problem in Shaw et al., (2014). The computation efficiency of seeker optimization algorithm-based reactive power dispatch method has been studied in Dai et al., (2009). In this work, the algorithm’s performance is judged based on evaluated of standard benchmark function and the same is applied on standard IEEE 57 and 118 bus power systems. The potential benefits of GA for optimal setting of all reactive power reserves have been studied in Bhattacharyya and Karmakar (2019) and Bhattacharyya et al., (2016). Here, shunt VAR compensator placement positions are determined by a fast voltage stability index method. The capability of a two-phase hybrid PSO approach has been used to solve OPRD problem that has been studied in Subbaraj and Rajnarayanan (2010). In Karmakar and Bhattacharyya (2018), metaheuristic method has been proposed for management of Var.
Transmission expansion planning model along with second-order cone programming has been proposed in Zhang et al., (2019) for high penetration of wind energy. Optimal reconfiguring of Algerian distribution electrical system with flexible AC transmission system devices has been proposed in Mahdad (2019) using fractal search algorithm. Artificial bee colony algorithm has been proposed in Ettappan et al., (2020) for the solution of ORPD problems. Two stage strategy like dynamic multiyear transmission expansion planning and transmission expansion planning problem has been developed in Gomes and Saraiva (2020). Bhattacharyya and Karmakar (2020) proposes a planning strategy based on soft computing techniques to determine the system energy loss and economic benefit for standard test system. The proposed work in Mahapatra et al., (2019) describes variations in PSO technique to improve the reduction in total cost of energy loss and real power loss for standard New England 39 bus system. Optimal allocation of distributed generations like photo-voltaic and wind turbine generations are presented in Samala and Kotapuri (2020). Voltage constrained reactive power planning problem for different reactive Loading has been presented in Shekarappa et al. (2021a, 2021b).
1.3 Motivations Behind the Present Work
Fuzzy-based concept is one of the methods to determine optimal location for the placement of shunt capacitors. The determination of proper position for the placement of additional shunt capacitors is one of the challenging tasks in RPP. The capacitance values of the shunts have a major impact on Ybus matrix. Thereby, the proposed work uses fuzzy membership value which is calculated based on loss sensitivity factor of each bus of the test network.
In the work done, shunt capacitors are placed at the appropriate place to provide reactive power near the inductive load which reduces the total current flowing on the distribution feeder, which improves the voltage profile along the feeder, provides additional feeder capacity, and reduces transmission loss in the line. At the transmission and sub-transmission system levels, the installed shunt capacitors provide supports in the more power transfer capability without necessitating the new lines or larger conductors. The long lead-time problems associated with the transmission line construction and high cost have driven to make use of high-voltage capacitors. The use of highvoltage capacitors ensures increased transmission bus operating voltages. As the transmission voltage increases, less current is necessary to supply a typical load, and so transmission losses decrease again.
In parallel, proper RPP seeks an optimal set of control variables related to the proposed objective function. It is a difficult task to find out the optimal values of the variables, simultaneously, by conventional methods. Hence, the authors have used the soft computing techniques to get a best solution of the objective function. For the proposed work, the crow search algorithm (CSA) is adopted because of its features like simple and straightforward to implement, avoid premature convergence and avoided local minima. The details of CSA have been introduced in Askarzadeh (2016). However, CSA suffers from exploitation capability, thus, it converges slowly to optimum solution. Thus, to enhance the exploitation capability of CSA, the concept of opposition-based learning (OBL) is adopted in the present work. The concept of OBL is described in Ganguly et al., (2018), Nandi et al., (2017) and Tizhoosh (2005). Solution for the RPP problem has been discussed in Babu et al., (2021), Badi et al., (2021), Raj et al., (2021) and Shekarappa et al. (2021a, 2021b). OBL is a new machine learning strategy for intensifying the convergence speed of diversified heuristic optimization techniques. The implementation of OBL implicates interpretation of current population and opposite population to obtain excels/enhanced candidate solution of the given problem in the same generation. The following are the advantages of CSA to enforce to use in the proposed work and expected to be better than other standard methods.
-
(a)
Lesser number of control parameters.
-
(b)
Faster convergence characteristics.
-
(c)
Same parameter settings for the different problems.
-
(d)
Its ability not to be trapped in local minima thus exploring wider search area.
-
(e)
Algorithm must be simple and straightforward to implement.
-
(f)
Derivative free algorithm which can be ratified easily.
-
(g)
Provides almost same approximate optimal solution consistently even after several trials.
Further, in the present work, the objective is not only to reduce active power loss by improving voltage profile of the power network but also to optimize the total system operating cost. The total system operating cost includes the cost of the energy loss due to active power loss and the cost of newly added Var sources at weak nodes. The method of finding the weak nodes is determined by a new technique in where the idea of fuzzy logic is implemented. In fuzzy logic implementation, both trapezoidal and triangular fuzzy membership values of loss sensitivity of buses are calculated. Based on these membership values, highly loss sensitive buses are identified as weak buses and are treated as candidate nodes for shunt Var support.
1.4 Contributions of this Study
In this study, the concept of fuzzy membership is introduced which is based on loss sensitivity factor of the test network. This is one of the different methods in determining the optimal location for the placement of shunt capacitors. Removing all burdens and difficulties, determination of proper position for the placement of additional shunt capacitors is one of the challenging tasks in RPP. Once the appropriate locations are determined, then, the newly developed CSA and OCSA techniques are proposed to solve RPP problem which is formulated as a nonlinear optimization problem with equality and inequality constraints in a studied power system. The implementation of OBL enhances the candidate solution of the given problem. The objective functions are based on minimization of transmission loss and operating cost while maintaining the magnitude of each bus within the permissible limit. The performance of the proposed approach is sought and tested on the standard IEEE 30 and IEEE 57 bus system. Based open the above interactions, the work done in this paper is summarized as followed.
-
(a)
A fuzzy logic-based novel approach is studied for Var planning to determine the capacitor placement position.
-
(b)
The computational efficiency of CSA and OCSA is studied to obtain the optimal setting of transformer tap positions, reactive generations of the generators and magnitude of shunt capacitors placed at the weak nodes.
-
(c)
The simulation results obtained by the proposed technique are compared with the methods subjected to Var planning.
The rest of the paper is documented in the following sequences. For the optimization task, the mathematical problem formulation is presented in Sect. 2. A short description of the fuzzy approach for the Var problem is stated in Sect. 3. Section 4 details the application of CSA and OCSA. Simulation-based results/observations of the present work are discussed in Sect. 5. Finally, the resultant pieces of outcomes of the present work are concluded in Sect. 6.
2 Mathematical Problem Formulation
The key to RPP is the optimal allocation of reactive power sources considering the locations. In recent works, locations for the placement of Var sources have become difficult task for the power system engineers. The important role of RPP problem is to minimize the active power loss of all the Var sources in the system by satisfying equality, as well as inequality constraints. Also, the optimization has to be done concerning the operating cost and improve the voltage deviation in the system. Apart from this, the objective is to reduce the cost of the shunt capacitors.
2.1 Minimization of Active Power Loss
To minimize the active power loss in transmission lines, it can be formulated as follows:
Minimize
where \(P_{{{\text{loss}}}}\) is active power loss; \(g_{k}\) is conductance of branch kth which is connected between xth and yth bus; \(V_{x}\) is the voltage magnitude of xth bus; \(V_{y}\) is the voltage magnitude of yth bus; \(\delta_{x}\) is the voltage phase angle of xth bus and \(\delta_{y}\) is the voltage phase angle of yth bus.
2.2 Minimize Operating Cost
To minimize the operating cost in transmission lines, it can be formulated as shown in (2), where \(S_{{{\text{Energy}}}}\) is the cost due to the loss of energy; \(S_{{{\text{Cap}}}}\) is the cost of capacitors installed at the nodes which are weak and \(S_{{{\text{Energy}}}} = P_{{{\text{Loss}}}} \, \times \,Energy\,rate\)
Test system is considered on 100 MVA base. Cost of capacitor installed = 1000 $, some of the cost data is collected from (1990b; Chiang et al., 1990a).
The above-mentioned problem formulation is needed to be optimized by satisfying all the equality and inequality constraints as mentioned below.
2.3 Equality Constraints
The load flow equation for equality constraints is illustrated as follows:
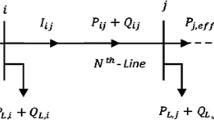
where \(n_{{\text{b}}}\) is the number of buses; \(P_{{{\text{G}}x}}\) is the active power generation at the xth bus; \(Q_{{{\text{G}}x}}\) is the reactive power generation at the xth bus; \(P_{{{\text{D}}x}}\) is the active power demand at the xth bus; \(Q_{{{\text{D}}x}}\) is the reactive power demand at the xth bus; \(G_{xy}\) is the transfer conductance between the xth bus and yth bus and \(B_{xy}\) is the transfer susceptance between the xth bus and yth bus.
2.4 Inequality Constraints
The inequality constraints include generator voltage magnitude, reactive power output by generator buses, shunt capacitors and transformer tap positions.
The boundary limits of these constraints must be satisfied as shown in Eq. (5).
3 Fuzzy Approach in the Present Problem
Fuzzy logic is a logical system which is in a form of multi-valued logic. It is related with the theory of fuzzy sets, a theory which relates to categorization of objects with unsharp boundaries in which membership plays an important role. There are three main elements in a fuzzy controller as (a) Fuzzification module, (b) Rule base and inference engine and (c) Defuzzification module.
The fuzzification converts real-life data input into suitable linguistic values. During fuzzification, a fuzzy controller receives input value, also known as the fuzzy variable, and analyses it according to user-defined charts called membership functions. The second element in an FLC is the rule base and inference engine. Rule base gives a decision-making logic. The third element is the defuzzification. The final output of the defuzzification is in the form of crisp quantity.
Here, the idea of two types of fuzzy membership function is implemented. One is trapezoidal membership function (Trapmf) and the other is triangular membership function (Trimf). As the transmission loss is a function of the node voltage (V), the incremental transmission loss (PL) can be expressed in (6).
From Bhattacharyya et al., (2009), it is realized that the transmission loss (PL) has inverse relationship with bus voltage (V). In the proposed approach, loss sensitivity at ith bus (Si) is defined at each node of the system so that
where n is the total number of nodes; \(S_{i}\) is the loss sensitivity of the ith bus.
Table 1 indicates fuzzy membership values (\(\Delta P_{{{\text{loss}}}} /{\text{d}}V\)) trapezoidal membership function (Trapmf) and triangular membership function (Trimf) for IEEE 30 bus system. Graphical presentation on triangular and Trapezoidal fuzzy membership function with \(\frac{{\partial P_{{{\text{Loss}}}} }}{\partial V}\) for IEEE 30 bus system are shown in Figs. 1 and 2, respectively. Similarly, Table 2 indicates fuzzy membership values (\(\Delta P_{loss} /dV\)) trapezoidal membership function (Trapmf) and triangular membership function (Trimf) for IEEE 57 bus system. Graphical presentation on triangular and Trapezoidal fuzzy membership function with \(\frac{{\partial P_{{{\text{Loss}}}} }}{\partial V}\) for IEEE 57 bus system are shown in Figs. 3 and 4, respectively.

Plot of triangular fuzzy membership function with \(\frac{{\partial P_{{{\text{Loss}}}} }}{\partial V}\) for IEEE 30 bus system

Plot of trapezoidal fuzzy membership function with \(\frac{{\partial P_{{{\text{Loss}}}} }}{\partial V}\) for IEEE 30 bus system

Plot of triangular fuzzy membership function with \(\frac{{\partial P_{{{\text{Loss}}}} }}{\partial V}\) for IEEE 57 bus system

Plot of trapezoidal fuzzy membership function with \(\frac{{\partial P_{{{\text{Loss}}}} }}{\partial V}\) for IEEE 57 bus system
Minimization of loss will take place when \(S_{i}\) is as negative as possible which indicates \(F_{i}\) is negative and \(\Delta V_{i}\) will attain its maximum possible value. Hence, it implies, more the value of S at a bus, more will be the voltage deviation at that bus. This idea is incorporated to evaluate the membership values of loss sensitivity of all the buses using trapezoidal and triangular membership functions. Based on this analysis, weak buses are selected for the placement of shunt capacitors.
4 Application of CSA and OCSA
4.1 CSA: Basic Concept
CSA is a new optimization technique for solving optimization problems that are based on crow intelligence in storing and retrieving its food from hidden locations (Askarzadeh, 2016). Crows have widely distributed genus of birds which are now considered to be among the intelligent animals. They can memorize faces, communicate in sophisticated ways as well as hide and retrieve food across seasons. In a group of crows or a flock of crows, there are many similarities with an optimization process in their behavior. According to this behavior, crows hide their excess food in some places of their environment and retrieve the store and food when it is needed. Crows are greedy birds since they follow each other to obtain better food sources. If a crow finds another one is following it, the crow tries to fool that crow by going to another position or late of the environment. The environment is the search space. Each position of the environment is corresponding to a feasible location. The quality of the food source is the objective of the food source of the environment which is the global solution to the problem. They have unique properties like they always live in the form of the flock, memorize the position of their hiding places, they follow each other to do thievery and they protect their caches from being pilfered by a probability. The mathematical model of these behaviors is discussed as follows:
Let us assume that there is a “d” dimensional search space which includes “N” number of flock size (number of crows).
The position of crow is “i” at time which is represented as Eq. (8). Each crow has a memory which is termed as its hiding place. At each iteration, the position of hiding place of crow is “i” which is represented as \(m_{i}^{{{\text{iter}}}}\). Assume crow “j” at “iter” visits its hiding place \(m_{j}^{{{\text{iter}}}}\). At this iteration, crow “i” decides to follow crow “j” in order to approach its hiding place of crow “j”. This results in two conditions:
Condition 1: If crow “j” does not know that crow “i” is following it, then, crow “i” will approach to the hiding place of crow “j”. Mathematically, \(r_{i}\) is greater than awareness probability of crow “j” then the new position of the crow “i” is obtained as shown below.
Condition 2: If crow “j” knows that crow “i” is following it, then in order to protect its food from being pilfered, crow “j” will try to fool crow “i” by going randomly to another position of search space.
Algorithmic steps for implementation of CSA are given as follows:
Step 1: The adjustable parameters of CSA like flock size (N), maximum number of iterations (itermax), flight length (\(fl\)) and awareness probability (AP) are defined.
Step 2: Initialize population matrix in dimension (d) search space which contains reactive power generation by generator bus (\(Q_{{\text{g}}}\)), transformer tap position (tap) and Var sources (\(Q_{c}\)).
Step 3: The memory of each crow is initialized. At initial iteration, since each crow does not have any experience, so it is assumed that they have hidden at their initial position.
Step 4: Evaluate fitness function using Eqs. (1) and (3) while satisfying equality constraints equation (3–4) and inequality constraints equation (5).
Step 5: Generate new position of crow in search space using Eq. (9).
Step 6: Update test system data. Then evaluate fitness function using Eqs. (1) and (3) while satisfying equality constraints equation (3–4) and inequality constraints equation (5).
Step 7: Compare current fitness value with pervious fitness value. Store the minimum fitness value along with its positions.
Step 8: Repeat step 4 to step 7, until it reaches maximum iteration.
Step 9: When the termination criterion is met. Display the best fitness value and best position of control variables of crow.
4.2 Oppositional-Based CSA
In the present work, in order to further improve the convergence characteristics of CSA, the CSA is modified to OCSA. The oppositional-based (Ganguly et al., 2018; Nandi et al., 2017; Tizhoosh, 2005) concept is applied in CSA, the current population (PN) is divided into two halves, i.e., the first half population (PN1) is created randomly within the search space and the remaining half population (PN2) is generated with flipped or opposite side of first half population (PN1) so as to improve the exploration capability in identifying the optimum solution region. This characteristic is incorporated into the basic CSA to obtain OCSA.
If \(X\left( {x_{1} , \, x_{2} , \, x_{3} , \, x_{4} , \ldots ,x_{d} } \right)\) is a candidate solution of PN1 generated within interval \(\left[ {X_{j}^{\min } ,X_{j}^{\max } } \right]\), where \(j = 1,2,3,4 \ldots ,d\). Then, opposite variable \(\left( {ox_{j} } \right)\) of each variable in X is calculated in the following manner to obtain candidate solution \(OX\left( {ox_{1} , \, ox_{2} , \, ox_{3} , \, ox_{4} , \ldots ,ox_{d} } \right)\) of population PN2
where d is the dimension of the search space Then, finally, the population set PN1 and PN2 form the actual population PN, i.e., PN = PN1 U PN2. Further, the algorithmic steps of the OCSA remain the same as CSA given above in Sect. 4.1.
After surveying the recent articles, it is found that CSA is very efficient in searching the proper value of the variables from a wide search space. However, CSA suffers from exploitation capability and, thus, it converges slowly to optimum solution. Thus, to enhance the exploration and exploitation capability of CSA, the concept of oppositional-based learning (OBL) is adopted in this work. OBL concept is a new machine learning strategy for intensifying the convergence speed of diversified heuristic optimization techniques. The implementation of OBL connects current population and opposite population to obtain improved candidate solution of the given problem in the same generation. It works efficiently on different engineering problems. OBL primarily benefits by increasing the probability of even visiting the unproductive regions. It has also been established through research work that opposite solution has greater possibility to move toward global optimal as compared to random solution. In short, OCSA engages opposite points for initializing the population and generation jumping and incorporates fitter candidate solution from the start of the optimization.
5 Result and Discussion
To verify the performance and efficiency of the proposed CSA and OCSA techniques, tests are carried out on the IEEE-30 bus and IEEE-57 bus test system. The boundary limits of transformer tap setting and shunt capacitors need to be satisfied as stated in Table 3 for standard IEEE 30 and IEEE 57 bus system during the optimization task. The description of these networks can be found in Table 4. All the simulations are carried out by using MATLAB 2013b and computed on core (TM) i7-3520M CPU a 2.90 GHz with 8 GB RAM. In the proposed work, the fuzzy membership values of loss sensitivity are applied to determine the weak locations for the placement of shunt capacitors. The CSA and OCSA techniques are employed to ascertain the optimal sizing of shunt capacitor and Var sources present in the existing transmission system. To indicate the optimization capability of the CSA and OCSA techniques, it is made to run for 30 independent trails with 500 iterations in each of the given test system and best results are bold faced in the respective tables.
In this work, authors used the capacitors as continuous variables while they are discrete variables in real life. The purpose of using the capacitor is to provide reactive power near the inductive load which reduces the total current flowing on the distribution feeder, which improves the voltage profile along the feeder, provides additional feeder capacity, and reduces transmission loss in the line. Thereby, the impacts of capacitors as discrete variables can be studied in the further study.
5.1 Test System 1: IEEE 30 Bus
The IEEE 30 bus system involves 6 generators, 41 lines, 4 transformers that are located at lines 6–9, 4–12, 9–12 and 27–28 (refer Table 5). Initially, the location for the probable voltage collapse point is evaluated by using fuzzy membership values of loss sensitivity. Loss sensitivity and fuzzy membership values are present in Table 1. From this table, it can be observed that the bus numbers like 7, 15, 19 and 24 are the most appropriate locations for the placement of reactive sources. Thereafter, shunt capacitors are placed at these locations, then, CSA and OCSA techniques are applied to find the optimal sizing of Var sources. Minimum and maximum limit settings for tap setting transformers, reactive compensators and generators voltages are given in Table 5. It also provides best control variable settings for minimization of real power loss and system operating cost which occur due to energy loss offered by the different optimization techniques.
Figure 5 shows the variation in reactive power generation by generator buses at each iteration. Figures 6 and 7 show the variation in shunt capacitors and variation in transformer tap positions at each iteration. From these figures, it can be observed that all the inequality constraints are satisfied. Figures 8 and 9 illustrate convergence curve of transmission loss and system operating cost due to energy loss. These figures describe the convergence behavior of the real power loss variation and overall operating cost, respectively, obtained by the proposed CSA and OCSA. It can be observed that the characteristics of both the algorithms are exponentially decaying till iteration number 200 and decreases further as the number of iterations increases till iteration number 500. This ensures the satisfactory convergence of both the algorithms. Further, it can be seen that even though CSA exponentially decreases faster than OCSA during the initial stages till iteration number 40, however, the OCSA exploited the candidate solution region faster than CSA due to oppositional-based population created at each iteration. Thus, due to this behavior OCSA, it provides best solution than CSA with a smaller number of iterations.

Variation in reactive power generation for Qg (2), Qg (5), Qg (8), Qg (11) and Qg (13)

Variation in shunt capacitor

Variation in transformer tap position for 11th, 12th, 15th and 36th line

Real power loss variation at each iteration

Variation in overall operating cost at each iteration
The comparative analysis of results using different methods for IEEE 30 bus system is shown in Table 6. The convergence curve candidly reveals the superiority of the proposed algorithm and the influence of CSA to avoid premature convergence and yield solution with accuracy.
5.2 Test System 2: IEEE 57 Bus
The IEEE 57 bus system involves 7 generators, 80 lines, 17 transformers that are located at lines 6–9, 4–12, 9–12 and 27–28 (refer Table 4). At first, the location of probable voltage collapse point is evaluated by using fuzzy membership values of loss sensitivity. The loss sensitivity and fuzzy membership values of the selected weak buses are shown in Table 1. From this table, it can be observed that bus no. 35, 38 and 53 are the most appropriate location for the placement of reactive sources. Subjected to this, the shunt capacitors are placed at these locations. After this, CSA and OCSA techniques are applied to find the optimal sizing of Var sources.
Figures 10, 11, 12, 13, 14 and 15 show the variation in reactive power generation by generator buses at each iteration, the variation in shunt capacitors at each iteration and the variation in transformer tap positions at each iteration, in order. From these figures, it can be observed that all the inequality constraints are satisfied.

Variation in reactive power generation for Qg (2), Qg (3), Qg (6), Qg (8), Qg (9) and Qg (12)

Variation in shunt capacitor

Variation in transformer tap position for 19, 20, 31 and 35th branch

Variation in transformer tap position for 36, 37, 41 and 46th branch

Variation in transformer tap position for 54, 58, 59 and 65th branch

Variation in transformer tap position for 66, 71, 73, 76 and 80th branch
Figures 16 and 17 illustrate the convergence curve of transmission loss and system operating cost due to energy loss. These figures describe the convergence behavior of the real power loss variation and overall operating cost, respectively, obtained by the proposed CSA and OCSA. It can be observed that the characteristics of both the algorithms are exponentially decaying and decreases further as the number of iterations increases till iteration number 500. This ensures the satisfactory convergence of both the algorithms. Further, it can be seen that even though CSA exponentially decreases faster than OCSA during the initial stages till iteration number 40, however, the OCSA exploited the candidate solution region faster than CSA due to oppositional based population created at each iteration. Thus, due to this behavior OCSA, it provides best solution than CSA with less number of iterations.

Real power loss variation at each iteration

Variation in overall operating cost at each iteration
Table 8 provides the best control variable settings for minimization of real power loss and system operating cost which occur due to energy loss offered by the different optimization techniques. The comparison for optimal setting of control variables in IEEE 57 bus system is shown in Table 7. The comparative analysis of results using the different methods for IEEE 57 bus system is shown in Table 8. From this information, it shows robustness of the proposed algorithm as it will be able to handle the complexities of a real-time interconnected system.
6 Conclusions and Future Scope Work
A novel fuzzy-based approach for RPP has been proposed in this work. Loss sensitivity of each bus of the power network is calculated, and fuzzy membership values are assigned to each of the buses. Then, weak buses are selected based on the higher membership values. Once the weak nodes are determined, these nodes are treated as the candidate buses for shunt capacitor placement. Based on the study, the following conclusions can be made.
-
(a)
CSA and OCSA are made to run for effective co-ordination of the installed shunt capacitors with other existing reactive power sources, i.e., transformer tap setting arrangements and reactive generation of generator buses.
-
(b)
The proposed algorithm determines the optimal setting of all the Var sources while satisfying equality as well as inequality constraints.
-
(c)
The results of the proposed method showed that fuzzy-based RPP active power loss is least, and system operating cost is also least in both the standard test systems.
-
(d)
There is also considerable reduction in active power loss and operating cost. Therefore, the proposed fuzzy-based RPP can be a useful tool for Var planning.
Availability of data and material
All data generated or analyzed during this study are included in this published article.
References
Abdul-Rahman, K. H., & Shahidehpour, S. M. (1993). A fuzzy-based optimal reactive power control. IEEE Transactions on Power Systems, 8(2), 662–670.
Abou El Ela, A. A., Abido, M. A., & Spea, S. R. (2011). Differential evolution algorithm for optimal reactive power dispatch. Electric Power Systems Research, 81(2), 458–464.
Askarzadeh, A. (2016). A novel metaheuristic method for solving constrained engineering optimization problems: Crow search algorithm. Computers & Structures, 169, 1–12.
Babu, R., Raj, S., Dey, B., & Bhattacharyya, B. (2021). Optimal reactive power planning using oppositional grey wolf optimization by considering bus vulnerability analysis. Energy Conversion and Economics. https://doi.org/10.1049/enc2.12048
Badi, M., Mahapatra, S., & Raj, S. (2021). Hybrid BOA-GWO-PSO algorithm for mitigation of congestion by optimal reactive power management. Optimal Control Applications and Methods. https://doi.org/10.1002/oca.2824
Bhattacharyya, B., & Babu, R. (2016). Teaching learning based optimization algorithm for reactive power planning. International Journal of Electrical Power & Energy Systems, 81, 248–253.
Bhattacharyya, B., & Goswami, S. K. (2007). Reactive power optimization through evolutionary techniques: A comparative study of the GA, DE and PSO algorithms. Intelligent Automation & Soft Computing, 13(4), 453–461.
Bhattacharyya, B., Goswami, S. K., & Bansal, R. C. (2009). Loss sensitivity approach in evolutionary algorithms for reactive power planning. Electric Power Components and Systems, 37(3), 287–299.
Bhattacharyya, B., & Karmakar, N. (2019). Optimal reactive power management problem: A solution using evolutionary algorithms. IETE Technical Review, 37, 1–9.
Bhattacharyya, B., & Karmakar, N. (2020). A planning strategy for reactive power in power transmission network using soft computing techniques. International Journal of Power and Energy Systems, 40(3), 141–148.
Bhattacharyya, B., & Raj, S. (2016). PSO based bio inspired algorithms for reactive power planning. International Journal of Electrical Power & Energy Systems, 74, 396–402.
Bhattacharyya, B., Rani, S., Vais, I. R., & Bharti, P. I. (2016). GA based optimal planning of VAR sources using Fast Voltage Stability Index method. Archives of Electrical Engineering, 65(4), 789–802.
Bie, Z. H., Song, Y. H., Wang, X. F., Taylor, G. A., & Irving, M. R. (2006). Integration of algorithmic and heuristic techniques for transition-optimised voltage and reactive power control. IEE Proceedings-Generation, Transmission and Distribution, 153(2), 205–210.
Chattopadhyay, D., & Chakrabarti, B. B. (2002). RPP incorporating voltage stability. International Journal of Electrical Power & Energy Systems, 24(3), 185–200.
Chen, Y.-L. (1996). Weak bus oriented RPP for system security. IEE Proceedings-Generation, Transmission and Distribution, 143(6), 541–545.
Chiang, H.-D., Wang, J.-C., Cockings, O., & Shin, H.-D. (1990a). Optimal capacitor placements in distribution systems. I. A new formulation and the overall problem. IEEE Transactions on Power Delivery, 5(2), 634–642.
Chiang, H.-D., Wang, J.-C., Cockings, O., & Shin, H.-D. (1990b). Optimal capacitor placements in distribution systems. II. Solution algorithms and numerical results. IEEE Transactions on Power Delivery, 5(2), 643–649.
Dai, C., Chen, W., Zhu, Y., & Zhang, X. (2009). Seeker optimization algorithm for optimal reactive power dispatch. IEEE Transactions on Power Systems, 24(3), 1218–1231.
Duman, S., Sonmez, Y., Güvenç, U., & Yörükeren, N. (2012). Optimal reactive power dispatch using a gravitational search algorithm. IET Generation, Transmission & Distribution, 6(6), 563–576.
Ettappan, M., Vimala, V., Ramesh, S., & Kesavan, V. T. (2020). Optimal reactive power dispatch for real power loss minimization and voltage stability enhancement using artificial bee colony algorithm. Microprocessors and Microsystems, 76, 103085.
Ganguly, S., Shiva, C. K., & Mukherjee, V. (2018). Frequency stabilization of isolated and grid connected hybrid power system models. Journal of Energy Storage, 19, 145–159.
Gao, B., Morison, G. K., & Kundur, P. (1992). Voltage stability evaluation using modal analysis. IEEE Transactions on Power Systems, 7(4), 1529–1542.
Ghose, T., Goswami, S. K., & Basu, S. K. (1999). Solving capacitor placement problems in distribution systems using genetic algorithms. Electric Machines & Power Systems, 27(4), 429–441.
Gomes, P. V., & Saraiva, J. T. (2020). A two-stage strategy for security-constrained AC dynamic transmission expansion planning. Electric Power Systems Research, 180, 106167.
Gudadappanavar, S. S., & Mahapatra, S. (2021). Metaheuristic nature-based algorithm for optimal reactive power planning. International Journal of System Assurance Engineering and Management. https://doi.org/10.1007/s13198-021-01489-x
Jabr, R. A. (2011). Optimization of reactive power expansion planning. Electric Power Components and Systems, 39(12), 1285–1301.
Jeyadevi, S., Baskar, S., & Iruthayarajan, M. W. (2011). RPP with voltage stability enhancement using covariance matrix adapted evolution strategy. European Transactions on Electrical Power, 21(3), 1343–1360.
Karmakar, N., & Bhattacharyya, B. (2018). A memory based meta-heuristic optimizer for optimal VAr management in power transmission system. In 2018 5th IEEE Uttar Pradesh section international conference on electrical, electronics and computer engineering (UPCON) (pp. 1–5). IEEE.
Lai, L. L., & Ma, J. T. (1997). Application of evolutionary programming to reactive power planning-comparison with nonlinear programming approach. IEEE Transactions on Power Systems, 12(1), 198–206.
Lee, K. Y., Member, S., & Yang, F. F. (1998). Optimal RPP using evolutionary algorithms: A comparative study for evolutionary programming, evolutionary strategy, genetic algorithm, and linear programming. IEEE Transactions on Power Systems, 13(1), 101–108.
Lin, S.-S., & Horng, S.-C. (2012). Iterative simulation optimization approach for optimal volt-ampere reactive sources planning. International Journal of Electrical Power & Energy Systems, 43(1), 984–991.
Mahapatra, S., Badi, M., & Raj, S. (2019). Implementation of PSO, it’s variants and Hybrid GWO-PSO for improving reactive power planning. In 2019 global conference for advancement in technology (GCAT) (pp. 1–6). IEEE.
Mahapatra, S., Dey, B., & Raj, S. (2021). A novel ameliorated Harris hawk optimizer for solving complex engineering optimization problems. International Journal of Intelligent Systems, 36(12), 7641–7681.
Mahdad, B. (2019). Optimal reconfiguration and reactive power planning based fractal search algorithm: A case study of the Algerian distribution electrical system. Engineering Science and Technology, an International Journal, 22(1), 78–101.
Mantovani, J. R. S., & Garcia, A. V. (1996). A heuristic method for reactive power planning. IEEE Transactions on Power Systems, 11(1), 68–74.
Miu, K. N., Chiang, H. D., & Darling, G. (1997). Capacitor placement, replacement and control in large-scale distribution systems by a GA-based two-stage algorithm. IEEE Transactions on Power Systems, 12(3), 1160–1166.
Nandi, M., Shiva, C. K., & Mukherjee, V. (2017). TCSC based automatic generation control of deregulated power system using quasi-oppositional harmony search algorithm. Engineering Science and Technology, an International Journal, 20(4), 1380–1395.
Outlook, A. E. (2010). Energy information administration. Department of Energy, 92010(9), 1–15.
Parida, S. K., Singh, S. N., & Srivastava, S. C. (2008). A hybrid approach toward security-constrained RPP in electricity markets. Electric Power Components and Systems, 36(6), 649–663.
Raj, S., & Bhattacharyya, B. (2016). Weak bus-oriented optimal Var planning based on grey wolf optimization. In 2016 national power systems conference (NPSC) (pp. 1–5). IEEE.
Raj, S., & Bhattacharyya, B. (2018). Reactive power planning by opposition-based grey wolf optimization method. International Transactions on Electrical Energy Systems, 28(6), 2551.
Raj, S., Mahapatra, S., Shiva, C. K., & Bhattacharyya, B. (2021). Implementation and optimal sizing of TCSC for the solution of reactive power planning problem using quasi-oppositional Salp swarm algorithm. International Journal of Energy Optimization and Engineering (IJEOE), 10(2), 74–103.
Samala, R. K., & Kotapuri, M. R. (2020). Optimal allocation of distributed generations using hybrid technique with fuzzy logic controller radial distribution system. SN Applied Sciences, 2(2), 1–14.
Shaw, B., Mukherjee, V., & Ghoshal, S. P. (2014). Solution of reactive power dispatch of power systems by an opposition-based gravitational search algorithm. International Journal of Electrical Power & Energy Systems, 55, 29–40.
Shekarappa, G. S., Mahapatra, S., & Raj, S. (2021a). Voltage constrained reactive power planning problem for reactive loading variation using hybrid Harris hawk particle swarm optimizer. Electric Power Components and Systems, 9(4–5), 421–435.
Shekarappa, G. S., Mahapatra, S., & Raj, S. (2021b). Voltage constrained reactive power planning by ameliorated HHO technique. In O. H. Gupta & V. K. Sood (Eds.), Recent advances in power systems (pp. 435–443). Springer.
Subbaraj, P., & Rajnarayanan, P. N. (2010). Hybrid particle swarm optimization based optimal reactive power dispatch. International Journal of Computer Applications, 1(5), 65–70.
Tizhoosh, H. R. (2005). Opposition-based learning: A new scheme for machine intelligence. In International conference on computational intelligence for modelling, control and automation and international conference on intelligent agents, web technologies and internet commerce (CIMCA-IAWTIC'06) (vol. 1, pp. 695–701). IEEE.
Viswanadha Raju, G. K., & Bijwe, P. R. (2008). Reactive power/voltage control in distribution systems under uncertain environment. IET Generation, Transmission & Distribution, 2(5), 752–763.
Yang, N., Yu, C. W., Wen, F., & Chung, C. Y. (2007). An investigation of RPP based on chance constrained programming. International Journal of Electrical Power & Energy Systems, 29(9), 650–656.
Zhang, H., Cheng, H., Liu, L., Zhang, S., Zhou, Q., & Jiang, L. (2019). Coordination of generation, transmission and reactive power sources expansion planning with high penetration of wind power. International Journal of Electrical Power & Energy Systems, 108, 191–203.
Zhu, J., Cheung, K., Hwang, D., & Sadjadpour, A. (2010). Operation strategy for improving voltage profile and reducing system loss. IEEE Transactions on Power Delivery, 25(1), 390–397.
Zhu, J. Z., & Xiong, X. F. (2003). Optimal reactive power control using modified interior point method. Electric Power Systems Research, 66(2), 187–192.
Funding
Not applicable (no funding received for the research reported).
Author information
Authors and Affiliations
Contributions
SR was mainly involved in coding and developing the optimization codes and implements them to attain the mentioned. CKS, SSG and BV has major contributor in writing the manuscript. RB has helped in revision. BB supervised the manuscript. All authors read and approved the final manuscript.
Corresponding authors
Ethics declarations
Conflicts of interest
The authors declare that they have no competing interests.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Shiva, C.K., Gudadappanavar, S.S., Vedik, B. et al. Fuzzy-Based Shunt VAR Source Placement and Sizing by Oppositional Crow Search Algorithm. J Control Autom Electr Syst 33, 1576–1591 (2022). https://doi.org/10.1007/s40313-022-00903-4
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40313-022-00903-4