
Abstract
We obtain optimal emission levels and abatement expenditures in a finite-horizon transboundary pollution game with emission trading between two regions. We show that emission trading has significant impact on the optimal strategies and profits of the two regions. We find that cooperation between the regions leads to increased abatement and lower emissions, resulting in a lower pollution stock. We also provide a stochastic extension in which the pollution stock and the emission trading price are diffusion processes and solve it numerically.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
In recent years, politicians and scholars have been focusing on the negative impact of rapid technological advancement and economic growth, as different types of pollution and environmental degradation have reached alarming levels. At the same time, the transboundary or the cross-border pollution has also received special attention in the literature (see, for example, Benchekroun and Chaudhuri [3], Hall [14], Youssef [28], and references therein). Just as the name implies, transboundary pollution is the pollution that generates in one region and can affect the surrounding regions via water and air.
To understand the relationship between the accumulation of pollution and the region’s strategies, we model the underlying problem as a differential game. The goals of the players or the neighboring regions with symmetric information in the transboundary pollution game are to maximize their respective profits by choosing their optimal allocations of emission permits and the amounts of pollution abatement. Dockner and Long [11] examine the optimal behavior of two neighboring regions in a game setting and conclude that when the two regions use only linear strategies, both regions suffer a loss caused by their competitive actions. However, when nonlinear Markov-perfect strategies are used, and the discount rate is small enough, then a subgame-perfect equilibrium can be reached. Yeung [25] studies a pollution management problem in a cooperative stochastic differential game framework, in which he proposes a payment distribution mechanism that would yield a time-consistent solution. List and Mason [19] conclude that the cooperative payoff is larger than the noncooperative one in a decentralized control setting, if the individual payoffs are sufficiently heterogeneous and the initial pollution stocks are sufficiently small. Kossioris et al. [16] use a numerical method to obtain a nonlinear feedback Nash equilibrium (FBNE) in a shallow lake pollution context and show that the equilibrium trajectory of the best FBNE is, in general, worse than the open-loop and optimal management solutions. Maler and Zeeuw [21] study open-loop and feedback Nash equilibria in an acid rain differential game and find that the depositions always converge to the critical loads. Benchekroun and Martín-Herrán [4] consider both farsighted and myopic behaviors in a transboundary pollution game. Their results suggest that it is necessary to design incentive mechanisms to induce a country to decide in a farsighted way and thereby to increase the number of farsighted countries. Huang et al. [15] present a cooperative differential game of transboundary industrial pollution, which involves a Stackelberg game between the industrial firms and their local governments. They provide a payment distribution mechanism which guarantees that cooperation would result in higher total payoff.
With increasing environmental awareness, every country in the world realizes the necessity of investing in abatement technologies. Besides, the environmental policies also give polluting firms an incentive to do R&D and invest in cleaner ways of production, to reduce their compliance costs. Therefore, some research has been done to examine the abatement decision in the process of environmental degradation. For example, Lundgren [20] presents a real option framework to explain the reasons behind producers voluntarily taking abatement actions and examining the relationship between the abatement decision and regulations, competitors’ strategies, uncertainty about future green goodwill, etc. Farzin and Kort [13] study the effect of a higher pollution tax rate on abatement investment both under full certainty and when the timing and/or the size of the tax increase is uncertain. Bertinelli et al. [5] propose a differential game framework for transboundary \(\hbox {CO}_2\) pollution to study the strategic behaviors of the players. In their proposed framework, the reduction of \(\hbox {CO}_2\) concentration can be realized by taking advantage of the carbon capture and storage techniques. They find that if there is a high enough level of \(\hbox {CO}_2\) at the beginning, then the optimal feedback strategies can lead to a higher overall environmental quality.
Furthermore, it is widely known that most pollution types are caused by over-emissions of industrial waste. To reduce greenhouse gas emissions, many regions have established and developed emission permits trading markets in recent years. In the cap-and-trade scheme, each emitter is allocated a total amount of emission, i.e., an initial quota. An emitter can sell the unused quotas in the market to other permit seekers or buy emission permits from the market if his emission level exceeds his assigned quota. This scheme reduces emission possible by adjusting the emission permits among the emitters through market means. The emission permits trading schemes have been studied by researchers including Chang et al. [6], Daskalakis et al. [12] and Seifert et al. [23], and its effects on the equilibrium of differential game have also been examined in Chang et al. [7] and Li [17].
Motivated by the above discussions, this article studies the two regions dynamic optimal strategies in transboundary pollution differential games, in which the abatement policy and emission trading are involved. By solving the derived Hamilton–Jacobi–Bellman (HJB) equations satisfied by the value functions, we work out the players’ optimal emission levels and optimal pollution abatement strategies in a finite-horizon game. Moreover, we solve a stochastic extension by numerical means. Our results show that emission trading has great impact on the optimal strategies and profits of the two regions. We show that cooperation between the players leads to greater abatement, fewer emissions, as well as fewer accumulated stock of pollution. Apart from the fact that cooperation is better than noncooperation, which can also be readily shown from a simple static prisoner’s dilemma, the optimal trajectory of the pollution stock is obtained from the complex dynamic game framework. Compared with the similar models without abatement, due to Chang et al. [7] and Li [17], our results demonstrate that the introduction of abatement can reduce the pollution stock. Specially, owing to the presence of the terminal point besides the stable states, our results can also provide the evolutions of emissions, abatements and revenues of the players and show that a higher unit salvage cost incentivizes the players to reduce emission, increase abatement, and then further reduce costs from the emission permits trading scheme. The results leads to an increase in net revenue that is absent in Li [17]. Additionally, in the stochastic case, different from the results in Chang et al. [7], our work shows that it is always beneficial for the players to choose cooperation. For the theory of differential games, we refer to Basar and Olsder [2], Dockner et al. [10] and Sethi and Thompson [24].
The remainder of the paper is organized as follows. In Sect. 2, the basic model is developed. Noncooperative and cooperative games are formulated in Sects. 3 and 4, respectively. Some discussion is provided with a few numerical examples in Sect. 5. A stochastic extension is treated in detail in Sect. 6. Lastly, Sect. 7 concludes the paper.
2 Basic Model
Similar to Li [17], we suppose that there are two nonidentical players (nations or regions) in our game framework. Also, the relationship between production revenue \(R_i\) and emission \(E_i(t)\) is as follows:
\(i=1,2\), where \(A_i>0\) is a constant, \(E_i(t)\) denotes the emission of region i at time t, and \(E_i(t) \in [0,A_i]\). This guarantees that \(R_i\) is an increasing concave function. Following Chang et al. [7], we set \(A_1=A\) and \(A_2=\alpha A\), where \(\alpha \) is a positive parameter that measures the gap between the two players’ abilities in obtaining benefits from production.
Then, we denote P(t) as the accumulated amount of pollution in the air at time t. Then, the evolutionary process of P(t) can be expressed as follows:
where \(E_1(t)\ge 0\) and \(E_2(t)\ge 0\) denote the two players’ emission rates at time t, and \(\theta \) represents the exponential decay rate of pollution. According to Chang et al. [7], we suppose that the loss suffered by player i is a linear function of P(t), namely \(D_iP(t)\), where \(D_i\) is a strictly positive parameter. Without loss of generality, we let \(D_1=D\) and \(D_2=\beta D\) where \(\beta \) is a positive constant that measures the gap between the two players’ abilities in suffering damages from pollution.
In recent years, with the signing of climate documents such as Kyoto protocol and Paris agreement, more and more countries in the world are beginning to regard abatement as a necessary issue in the process of development. Similar to Bertinelli et al. [5], by employing the abatement strategy, the regions can reduce the accumulated amount of pollution, that is
where \(a_1(t)\) and \(a_2(t)\) are the region 1’s and region 2’s amounts of pollution abatement, respectively, and the two regions can suffer fewer pollution damages. However, the two regions should also face the costs of abatement which reduce the flow of net revenues. As is standard in economics, we assume the abatement cost to be convex. Specially, we assume it to be \(\frac{1}{2}C_ia_i^2(t)\), \(i=1,2\), where \(C_i\) is a positive constant and can be regarded as the abatement cost coefficient. Similarly, we set \(C_1=C\) and \(C_2=\gamma C\), where \(\gamma \) measures the gap between the two regions’ abilities in mastering the abatement technology.
In addition, the region i’s cost from the emission permits trading scheme is given by \( S(E_i(t)-E_{i0}(t)-a_i(t)), \) at time t, where \(S\ge 0\) is a given constant permit price and \(E_{i0}(t)\) is the instantaneous permits quota allocated by the emission regulatory authorities. Specifically, \(E_i(t)-E_{i0}(t)-a_i(t)>0\) means that region i buys the permits from others who have unused permits and \(E_i(t)-E_{i0}(t)-a_i(t)<0\) means that region i sells its unused permits to other permit seekers in the market. We assume that the quota assigned to region i is exponentially decreasing over time at the rate \(\rho _i>0\), i.e., \(E_{i0}(t)=E_{i0}e^{-\rho _i t}\). This assumption is entirely reasonable given what is observed in many emission trading schemes. Additionally, it encourages the players to reduce emission over time. We should also mention that the assumption of the instantaneous quota has been widely used in the environmental management and operations literature; see, e.g., Dobos [8], Dobos [9], Li [17], Chang et al. [7], Li [18], Zhang et al. [29].
The assumption of the exogenous emission permit price S, on the other hand, is a strong one. However, it is appropriate in a variety of cases. In our model, the two regions are neighbors such as countries, states, or cities and the pollutant can be gas, liquid or solid. Hence, the two players of any sizes are the contributors to the local pollution dynamics. If these are, say, located in Europe, they may not have much influence on the permits price in the big European Union permits market. In the case, when the two regions are large such as continents, we can in view of the rapid economic development and increasing globalization envision a future when there would be a global emission permit trading market, with the continental polluters having little influence on the emission permits price. A particular case (suggested by a referee) is that of carbon pricing mechanisms that work a little like feebates. If a region exceeds its target, it pays a fixed unit tax per unit exceeding the target. If it emits less than its target, it gets a fixed per unit subsidy per unit below the target. In our model, this target for region i can be thought of as its quota \(E_{i0}(t)\), while S is the fixed per unit fee or rebate. A good instance of this situation is the “Carbon Competitiveness Incentive Regulation” in Canada’s Alberta Province. Finally, we note that our way of modeling emission trading is an extension of Li [17] in that we allow both the terminal salvage cost and the abatement policy.
The goal of region i is to come up with the optimal emission level and the optimal abatement strategy that maximize the discounted stream of revenue and cost over a finite horizon T: production revenue, costs from the emission permits trading, pollution damages, and abatement costs. Additionally, according to Yeung and Petrosyan [26], we assume that at the end of the game, the region i’s salvage cost of dealing with the excess pollution stock is \(g_i(P(T)-{\bar{P}}_i)e^{-rT}\), where \(g_i\) is the unit cost, \({\bar{P}}_i\) denotes the datum pollution stock, and \(P(T)-{\bar{P}}_i\) is the excess pollution stock which needs to be treated. Then, the optimal control problem of region i is given by
subject to
where \(r>0\) is the risk-free discount rate.
In the next two sections, we will use the optimal control theory and HJB equations to find the optimal emission levels and optimal abatement strategies, such that the two players’ discounted flows of profits are maximized under cooperative and the noncooperative games, respectively.
3 Noncooperative Game
Each player in a noncooperative game makes his own decision to maximize his own profits. Thus, the players seek a Nash equilibrium to obtain their optimal emission levels and optimal abatement strategies. That is, the problem of region 1 is described by
and that of region 2 is governed by
where \(E_{N1}(t)\) and \(E_{N2}(t)\) denote the emission levels of regions 1 and 2, and \(a_{N1}(t)\) and \(a_{N2}(t)\) denote the abatement levels of regions 1 and 2 in the noncooperative game, respectively.
By using the differential games theory, we can obtain the system of HJB equations satisfied by the value functions \(V_{N1}\) and \(V_{N2}\) for regions 1 and 2 as follows:
with the terminal conditions
where
and
According to the first-order optimality condition, we know that the optimal emission levels \(E^*_{N1}\) and \(E^*_{N2}\), and the optimal abatement levels \(a^*_{N1}\) and \(a^*_{N2}\) can be given by the following equations:
Proposition 1
In the noncooperative game, \(\{V_{\mathrm{Ni}}(P,t),E^*_{\mathrm{Ni}}(t),a^*_{\mathrm{Ni}}(t)\}\), \(i=1,2\), denote the Nash equilibrium solutions of the value functions and the control variables. Then, we have
where \(l_1(t)\), \(l_2(t)\), \(k_1(t)\), \(k_2(t)\) are given in “Appendix A” section.
Proof
See “Appendix A” section.
We can clearly see that the value functions are linear functions with respect to the state variable, namely the pollution stock P.
If we let
and
then, some useful results are presented in the following corollaries. \(\square \)
Corollary 1
-
(i)
When \(A-S+\left( \frac{ D}{r+\theta }-g_1\right) e^{-(r+\theta )(T-t)}-\frac{ D}{r+\theta }>E_{10}e^{-\rho _1 t}\), region 1 should buy emission permits at time t; when \(A-S+\left( \frac{ D}{r+\theta }-g_1\right) e^{-(r+\theta )(T-t)}-\frac{ D}{r+\theta }<E_{10}e^{-\rho _1 t}\), region 1 should sell emission permits at time t; and when \(A-S+\left( \frac{ D}{r+\theta }-g_1\right) e^{-(r+\theta )(T-t)}-\frac{ D}{r+\theta }=E_{10}e^{-\rho _1 t}\), region 1 neither buys nor sells emission permits at time t. Similarly, when \(\alpha A-S+\left( \frac{\beta D}{r+\theta }-g_2\right) e^{-(r+\theta )(T-t)}-\frac{\beta D}{r+\theta }>E_{20}e^{-\rho _2 t}\), region 2 should buy emission permits at time t; when \(\alpha A-S+\left( \frac{\beta D}{r+\theta }-g_2\right) e^{-(r+\theta )(T-t)}-\frac{\beta D}{r+\theta }<E_{20}e^{-\rho _2 t}\), region 2 should sell emission permits at time t; and when \(\alpha A-S+\left( \frac{\beta D}{r+\theta }-g_2\right) e^{-(r+\theta )(T-t)}-\frac{\beta D}{r+\theta }=E_{20}e^{-\rho _2 t}\), region 2 neither buys or sells emission permits at time t.
-
(ii)
The profits of the two regions will increase with the decrease in pollution stock P and with increase in their instantaneous emission permits quotas at any time before T.
-
(iii)
If \(\tau _1(t)E_{10}\ge \phi \), region 1’s profit should increase monotonically with increase in the permit price at time t; if \(\tau _1(t)E_{10}\le \phi -\eta \), region 1’s profit should decrease monotonically with increase in the permit price at time t; if \(\phi -\eta \le \tau _1(t)E_{10} \le \phi \), region 1’s profit should increase monotonically with increase in permit price at time t when \(0<S<\phi -\tau _1(t)E_{10}\) and decrease monotonically with increase in the permit price at time t when \(\phi -\tau _1(t)E_{10}<S<\eta \). Similarly, if \(\tau _2(t)E_{20}\ge \psi \), region 2’s profit should increase monotonically with increase in the permit price at time t; if \(\tau _2(t)E_{20}\le \psi -\eta \), region 2’s profit should decrease monotonically with increase in the permit price at time t; if \(\psi -\eta \le \tau _2(t)E_{20} \le \psi \), region 2’s profit should decrease monotonically with increase in the permit price at time t when \(0<S<\psi -\tau _2(t)E_{20}\), and increase monotonically with increase in the permit price at time t when \(\psi -\tau _2(t)E_{20}<S<\eta \).
Proof
See “Appendix B” section.
From the results in (iii) in Corollary 1, we can see that the instantaneous quotas play an essential role in examining the effect of emission permits price on the two regions’ profits. If the instantaneous quotas are very large, then the emission levels will not exceed them, so the players in the game can sell their excess emission permits in the market and they benefit more from increases in the price of emission permits. If the two regions receive a fewer amounts of instantaneous quotas, then the emission levels can easily exceed them. In this case, the two regions have to spend money to buy emission permits and their profits will decrease with increases in the price of permits. If the amount of instantaneous quotas is adequate, the two regions’ revenues will first decrease with increases in the price of permits and then increase with increases in the price of permits.
The following corollary shows the trajectories of the pollution stock along with an optimal emission path. Moreover, the evolution of the pollution stock is demonstrated to be very highly related to the initial pollution stock. \(\square \)
Corollary 2
Let
and
Then we can obtain the trajectory of the pollution stock under the noncooperative game as follow:
In addition, when \(P_0<X_{N}+Y_{N}e^{-(r+\theta )T}(1+\frac{1}{\theta }(r+\theta )e^{(r+2\theta )t})\), the evolution of the pollution stock is an accumulative process; when \(P_0>X_{N}+Y_{N}e^{-(r+\theta )T}(1+\frac{1}{\theta }(r+\theta )e^{(r+2\theta )t})\), the evolution of the pollution stock is an dissipative process; when \(P_0=X_{N}+Y_{N}e^{-(r+\theta )T}(1+\frac{1}{\theta }(r+\theta )e^{(r+2\theta )t})\), the pollution stock is a constant.
Proof
See “Appendix C” section. \(\square \)
4 Cooperative Game
A cooperative game means that the players come to a binding agreement to make the coalition reach the optimum. In our cooperative game, the two regions find the optimal emission levels and optimal abatement strategies to maximize their joint net profit. The resulting problem can be written as follows:
where \(E_{C1}(t)\) and \(E_{C2}(t)\) denote the emission levels of regions 1 and 2, and \(a_{C1}(t)\) and \(a_{C2}(t)\) denote the abatement levels of regions 1 and 2 in the cooperative game, respectively.
The corresponding HJB equation for the joint value function \(V_C\) can be written as follows:
with the terminal condition
where
From the first-order optimality condition, we know that the two regions’ optimal emission levels \(E^*_{C1}\) and \(E^*_{C2}\), and the optimal abatement levels \(a^*_{C1}\) and \(a^*_{C2}\) can be given by the following equations:
Proposition 2
In the cooperative game, \(\{V_{C}(P,t),E^*_{\mathrm{Ci}}(t),a^*_{\mathrm{Ci}}(t)\}\), \(i=1,2\), denote the solutions of the value function and the control variables. Then,
where l(t) and k(t) are given in “Appendix C” section.
Proof
See “Appendix D” section.
Letting
and
we have the following corollary. \(\square \)
Corollary 3
-
(i)
When \(A-S+\left( \frac{(1+\beta )D}{r+\theta }-g_1-g_2\right) e^{-(r+\theta )(T-t)}-\frac{ (1+\beta )D}{r+\theta }>E_{10}e^{-\rho _1 t}\), region 1 buys emission permits at time t; when \(A-S +\left( \frac{(1+\beta )D}{r+\theta }-g_1-g_2\right) e^{-(r+\theta )(T-t)}-\frac{ (1+\beta )D}{r+\theta }<E_{10}e^{-\rho _1 t}\), region 1 sells emission permits at time t; and when \(A-S+ \left( \frac{(1+\beta )D}{r+\theta }-g_1-g_2\right) e^{-(r+\theta )(T-t)}-\frac{ (1+\beta )D}{r+\theta }=E_{10}e^{-\rho _1 t}\), region 1 neither buys nor sells the emission permits at time t. Similarly, when \(\alpha A-S+ \left( \frac{(1+\beta )D}{r+\theta }-g_1-g_2\right) e^{-(r+\theta )(T-t)}-\frac{ (1+\beta )D}{r+\theta }>E_{20}e^{-\rho _2 t}\), region 2 buys emission permits at time t; when \(\alpha A-S+ \left( \frac{(1+\beta )D}{r+\theta }-g_1-g_2\right) e^{-(r+\theta )(T-t)}-\frac{ (1+\beta )D}{r+\theta }<E_{20}e^{-\rho _2 t}\), region 2 sells emission permits at time t; and when \(\alpha A-S +\left( \frac{(1+\beta )D}{r+\theta }-g_1-g_2\right) e^{-(r+\theta )(T-t)}-\frac{ (1+\beta )D}{r+\theta }=E_{20}e^{-\rho _2 t}\), region 2 neither buys nor sells emission permits at time t.
-
(ii)
The joint profit of the two regions increases when the pollution stock P decreases or when their instantaneous emission permits quotas increase at any time before T.
-
(iii)
If \(\tau _{C1}(t)E_{10}+\tau _{C2}(t)E_{20}\ge {\bar{\phi }}\), then the two regions’ total profit increases monotonically with the permit price at time t; if \(\tau _{C1}(t)E_{10}+\tau _{C2}(t)E_{20}\le {\bar{\phi }}-2{\bar{\eta }}\), the two regions’ total profit decreases monotonically with the permit price at time t; if \({\bar{\phi }}-2{\bar{\eta }}< \tau _{C1}(t)E_{10}+\tau _{C2}(t)E_{20} < {\bar{\phi }}\), the two regions’ total profit decreases monotonically with the permit price at time t when \(0<S<\frac{1}{2}({\bar{\phi }}-\tau _{C1}(t)E_{10}-\tau _{C2}(t)E_{20})\) and increases monotonically with the permit price at time t when \(\frac{1}{2}({\bar{\phi }}-\tau _{C1}(t)E_{10}-\tau _{C2}(t)E_{20})<S<\eta \).
Proof
See “Appendix E” section.
In the cooperative game, if the sum of the instantaneous quotas is large, their joint profit increases with the permits prices, with fewer instantaneous quotas, their joint profit decreases with the permits price. If the sum of the instantaneous quotas is adequate, their joint profit first decreases and then increases with the permits price. \(\square \)
Corollary 4
Let
and
Then, the trajectory of the pollution stock in the cooperative game is:
In addition, when \(P_0<X_{C}+Y_{C}e^{-(r+\theta )T} \left( 1+\frac{1}{\theta }(r+\theta )e^{(r+2\theta )t}\right) \), the evolution of the pollution stock is an accumulative process; when \(P_0>X_{C}+Y_{C}e^{-(r+\theta )T}\left( 1+\frac{1}{\theta }(r+\theta )e^{(r+2\theta )t}\right) \), the evolution of pollution stock is a dissipative process; when \(P_0=X_{C}+Y_{C}e^{-(r+\theta )T} \left( 1+\frac{1}{\theta }(r+\theta )e^{(r+2\theta )t}\right) \), the pollution stock is a constant.
Proof
See “Appendix F” section. \(\square \)
5 Discussion
In this section, we compare the optimal emission paths, the optimal abatement strategies and the value functions obtained in the two games.
5.1 Difference in the Optimal Strategies
First, we examine the difference in the optimal emission paths and the optimal abatement strategies. From Propositions 1 and 2 , we can obtain
which imply that in both regions, the optimal emission levels under the cooperative game are lower than those under the noncooperative game, and the optimal abatement levels under the cooperative game are higher than those under the noncooperative game. The obvious reason is that under the noncooperative game, the two regions make decisions to maximize their respective profits. This creates a conflicting situation in which one region may try to reduce its pollution damage by reducing emissions or implementing pollution abatement only to find that its effort is offset by the other region increasing the emission level to obtain more production profit. This would not happen in the cooperative game because of their binding contract to cooperate.
Moreover, we also know from Propositions 1 and 2 that if the salvage cost coefficients \(g_1\) and \(g_2\) are sufficiently large, the optimal emission paths of the two regions are both decreasing over time and the optimal abatement levels of the two regions are both increasing over time in the noncooperative as well as in the cooperative game. This implies that when the two regions have to suffer from a high salvage cost, they are more willing to reduce emissions and implement pollution abatements to lower the pollution stock level.
5.2 Difference in the Optimal Trajectories of the Pollution Stock
According to (8) and (12), we can calculate the difference in the optimal trajectories of the pollution stocks as follows:
where
and
Then, we can find a sufficiently large pair \((g_1^{*},g_2^{*})\) to make \(P_C(t)-P_N(t)<0\) at each time t, since \(P_C-P_N\) is a decreasing function of \(g_1\) and \(g_2\). This means that the pollution stock under the cooperative game will be lower than that under the noncooperative game. It naturally follows that any reduction in emission and increase in abatement can diminish the accumulation of the pollution stock.
5.3 Difference in the Optimal Net Revenues
From (7a), (7d) and (11a), we can calculate the difference in the optimal profits as follows:
where
and
Note that the coefficients \(e^{-\theta (T-t)}-1\) and \(e^{-(r+2\theta )(T-t)}-1\) are negative, which make \(V_C-V_{N1}-V_{N2}\) to be an increasing function of \(g_1\) and \(g_2\) when \(g_1>\frac{D}{r+\theta }\) and \(g_2>\frac{\beta D}{r+\theta }\). Thus, we can also find a sufficiently large pair \((g_1^{**},g_2^{**})\) to make \(V_C-V_{N1}-V_{N2}>0\). Therefore, we can say that when the salvage costs are large enough, it is better for the two regions to cooperate.
5.4 Numerical Example
In this subsection, we illustrate our results by some numerical examples. The parameters are: \(T=10\), \(A=20\), \(\alpha =0.9\), \(E_{10}=5\), \(E_{20}=6\), \(\rho _1=0.05\), \(\rho _2=0.04\), \(\theta =0.6\), \(P_{0}=200\), \(S=1\), \(D=3\), \(\beta =1.2\), \(C=2\), \(\gamma =1.5\), \(r=0.08\), \(g_1=8\), \(g_2=9\), \(\bar{P_1}=1100\), and \(\bar{P_2}=1200\) (Chang et al. [7]).
5.4.1 Basic Results
The results of Propositions 1 and 2 are sketched in Fig. 1. The two regions’ optimal emission levels and optimal abatement levels under the noncooperative and the cooperative games are shown in Fig. 1a, b, respectively. We can see that the emission levels and the abatement levels are relatively stable at the start, while the former shows an increasing trend and the latter shows a decreasing trend closer to the terminal time point. From Propositions 1 and 2, we know that the observed emission and abatement paths evolve in the opposite directions. This implies that in a dynamic transboundary pollution game with a terminal salvage cost, the players adopt relatively stable emission and abatement strategies most of the time and rapidly decrease emission and increase abatement closer to the expiration date to reduce the pollution stock and to avoid high salvage cost. This behavior could capture the initial revenues and reduce the loss due to pollution as much as possible.

Numerical results, a emission levels, b abatement levels, c pollution stocks, d value functions
In addition, in each region, the noncooperative emission level is higher than the cooperative emission level, and the noncooperative abatement level is lower than the cooperative abatement level. Figure 1c also demonstrates that the pollution stock under the noncooperative game is higher than that under the cooperative game. All these results imply that cooperation plays an important role in improving the environmental quality.
It is necessary to focus on the issue of how to distribute the aggregate profit to each player in the cooperative game. The payment distribution mechanism that we use in this paper is to share the aggregate profit by the proportion of their noncooperative profits. This can be expressed mathematically as
\(i=1,2\), where \(V_{\mathrm{Ci}}\) denotes the region i’s value function in the cooperative game. According to Yeung [25], Yeung and Petrosyan [26] and Chang et al. [7], this payment distribution mechanism supports the subgame consistent solution, and in this case the two players should be committed to cooperation throughout the game. The two regions will cooperate when \(V_C>V_{N1}+V_{N2}\) and the profit \(V_{\mathrm{Ci}}\) in the cooperative game is higher than the profit \(V_{\mathrm{Ni}}\) in the noncooperative game. Based on this, we can plot the two regions’ value functions under the noncooperative and the cooperative games in Fig. 1d, which shows that the two regions would obtain higher profits when they cooperate. Therefore, we conclude that in both economic and environmental terms, cooperation is always better than noncooperation.
5.4.2 The Effects of the Salvage Cost on the Results
It is easy to see from our theoretical results that the value of datum pollution stock \({\bar{P}}_i\) only influences the revenues of the players; namely, the bigger the \({\bar{P}}_i\) is, the more are the revenues. So, we simply examine the effects of unit salvage cost \(g_i\). Since the results are similar for the two players under cooperative and noncooperative games, here for brevity we present the effects of \(g_1\) on the region 1’s optimal strategies for emission and abatement, optimal net revenues, and the optimal trajectories of the pollution stock under the noncooperative game only.
Figure 2, in which \(g_1\) is set at 6, 8, and 10, shows the effects of \(g_1\) on the results. We can see from the figure that a higher unit salvage cost results in a lower emission level, a higher abatement level and more revenues, while the optimal trajectory of the pollution stock is insensitive to \(g_1\). This implies that a higher unit salvage cost should incentivize the players to reduce emission, increase abatement, and then further reduce costs from the emission permits trading scheme, leading to increases in net revenues.
In Fig. 3, we plot the emission levels and abatement levels for a longer horizon \(T=100\). Here we see that the results are primarily driven by the salvage value function. Specifically, the emission and abatement levels are at a steady state until close to the terminal time when the levels deviate from the steady state because of the influence of the salvage cost. Such results are common in the economics literature; see, e.g., Sects. 7.2 and 13.3 in Sethi and Thompson [24].

The effects of \(g_1\) on the results, a emission levels, b abatement levels, c pollution stocks, d value functions

The effects of time horizon on the results, a emission levels, c abatement levels
6 Stochastic Extension
6.1 Game Framework
Our model can be extended to a stochastic multi-dimensional versions by considering stochastic emission permits prices and a stochastic evolution of the pollution stock. Several studies, such as Chang et al. [6] and Daskalakis et al. [12], have demonstrated that the emission permit price should be stochastic, as it is caused by the scarcity of emission permits and market discipline. Moreover, the dynamic process of the pollution stock may be affected by extreme weather events such as gales, nature’s ability to refresh the air, and other stochastic disturbances. In recent years, several stochastic optimal control models have been proposed to deal with the uncertainty in pollution stock, such as Athanassoglou and Xepapadeas [1], Masoudi et al. [22], and Yi et al. [27]. Based on the above, we consider the following dynamics of the emission permits price S(t) and the pollution stock P(t):
and
where \(\mu _S\) is the drift rate of the emission permit price, \(\sigma _S\) and \(\sigma _P\) are the volatilities of the emission permit price and the pollution stock, respectively, and \(W_S\) and \(W_P\) are two correlated Brownian motions with the correlation coefficient \(\rho >0\), whereas \(\rho =0\) means they are independent of each other.
For the cooperative game with \({\mathbb {E}}\) denoting the expectation, the objective function and the corresponding HJB equation are
and
with the terminal condition
where
For the noncooperative game, the objective functions for regions 1 and 2, and the corresponding HJB system are, respectively,
and for region 2,
and
with the terminal conditions
where
and
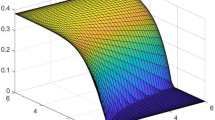
Since the HJB Eqs. (19) and (19a) cannot be solved analytically, we propose a so-called fitted finite volume method to discretize the equations. This numerical scheme is presented in “Appendix G” section. The theoretical results about the method will be presented in another work. The values of parameters used in this subsection are the same as those in Chang et al. [7]: \(T=10\), \(A_1=20\), \(\alpha =0.9\), \(P_{\min }=200\), \(P_{\max }=1000\), \(S_{\min }=0\), \(S_{\max }=2\), \(E_{i0}=5\), \(E_{j0}=6\), \(\rho _1=0.05\), \(\rho _2=0.04\), \(\theta =0.6\), \(\sigma _P=0.3\), \(\sigma _S=0.3\), \(\mu _S=0.2\), \(\rho =0.5\), \(D_1=0.1\), \(\beta =1.2\), \(r=0.08\), \(g_i=2\), \(g_j=3\), \({\bar{P}}_i=1100\), \({\bar{P}}_j=1200\), where \([P_{\min },P_{\max }]\times [S_{\min },S_{\max }]\) is the computational region of our problems.

Numerical results for the stochastic model, a emission levels, b abatement levels, c value functions
6.2 Numerical Results
In Fig. 4, we plot the numerical results of the stochastic model over time by fixing \(P=800\) and \(S=1\). Once again we see that both regions will benefit from cooperation. Further, cooperation also leads to lower emission levels and higher abatement levels for each region.
It is interesting to note that the emission levels are decreasing over time and the abatement levels are increasing over time, which is similar to the deterministic case, while the profits first increase with time and then dramatically decrease until the terminal time, which is different from the deterministic case. We can conclude that this difference is caused by the randomness in the pollution stock and the emission permit price. The risk due to randomness is accumulated gradually as time progresses, and when a threshold value is reached by the risk, the players in the game suffer losses, denoting the decreasing phase in Fig. 4c.

The effects of \(\sigma _P\) in the cooperative game, a \(V_{C1}\), b \(V_{C2}\), c \(E_{C1}\), d \(E_{C2}\), e \(a_{C1}\), f \( a_{C2}\)

The effects of \(\sigma _P\) in the noncooperative game, a \(V_{N1}\), b \(V_{N2}\), c \(E_{N1}\), d \(E_{N2}\), e \(a_{N1}\), f \(a_{N2}\)
6.3 Sensitivity Analysis
In this subsection, we present the sensitivity analysis of the numerical results concerning the parameters of the Brownian motions. The effects of the other parameters on the game can be obtained from the above analytical results. Since the parameters \(\mu _S\) and \(\sigma _S\) have little influence on the results, we will only examine the effects of \(\sigma _P\) on the optimal profit, the optimal emission paths as well as the optimal abatement strategies under the cooperative and noncooperative games, respectively. In Figs. 3 and 4, we fix \(P=675\), \(S=1\), and set \(\sigma _P\) to be 0.25, 0.3 and 0.35, respectively.
Figures 5 and 6 show the effects of the parameter \(\sigma _P\) on the cooperative game and the noncooperative game, respectively. On the one hand, we can see from 5a, b and 6a, b that the optimal profits of both regions decrease with \(\sigma _P\). A higher volatility \(\sigma _P\) implies that the two regions will bear a higher risk of the pollution stock. To control this risk, more efforts, such as investments in strategic portfolios and infrastructure construction, should be made. This implies that higher volatility of the pollution stock will reduce the two regions’ revenues in the game.
On the other hand, the more the volatility of the pollution stock is, the lower emission levels and the higher abatement levels are for the two regions under both types of games. This can be illustrated as follows. The regions may suffer from more pollution damage if the volatility \(\sigma _P\) increases, so they should do their best to reduce the pollution stock to avoid the climate risk as far as possible. Reducing emission and increasing abatement should be reasonable choices in the game for both players. Moreover, another advantage of emission reduction is that the players could save more unused emission permits and sell them in the market to receive benefits, thus offsetting the reduction in the productive revenues.
7 Concluding Remarks
In this paper, we investigate the regions’ dynamic optimal strategies in finite-horizon differential games of transboundary industrial pollution. In particular, the emission trading scheme and the abatement policy are involved in our differential game models. Through solving the HJB equations satisfied by the value functions, we can obtain the two regions’ optimal emission paths, optimal abatement levels, as well as the optimal trajectories of the pollution stocks under the noncooperative and the cooperative games. Moreover, a stochastic extension is also discussed.
Our results show that the two regions’ instantaneous quotas affect their profits to a great extent. Additionally, cooperation leads to increased amounts of abatement, fewer emissions, and a lower pollution stock. This emphasizes the fact that cooperation is a better choice in both economic and environmental terms.
References
Athanassoglou S, Xepapadeas A (2012) Pollution control with uncertain stock dynamics: when, and how, to be precautious. J Environ Econ Manag 63:304–320
Basar T, Olsder GJ (1999) Dynamic noncooperative game theory. SIAM, Philadelphia
Benchekroun H, Chaudhuri A (2013) Transboundary pollution and clean technologies. Resour Energy Econ 36:601–619
Benchekroun H, Martín-Herrán G (2016) The impact of foresight in a transboundary pollution game. Eur J Oper Res 251:300–309
Bertinelli L, Camacho C, Zou B (2014) Carbon capture and storage and transboundary pollution: a differential game approach. Eur J Oper Res 237:721–728
Chang K, Wang S, Peng K (2013) Mean reversion of stochastic convenience yields for \(\text{ CO }_2\) emissions allowances: empirical evidence from the EU ETS. Span Rev Financ Econ 11:39–45
Chang S, Wang X, Wang Z (2015) Modeling and computation of transboundary industrial pollution with emissions permits trading by stochastic differential game. PLoS ONE 10:e0138641
Dobos I (2005) The effects of emission trading on production and inventories in the Arrow–Karlin model. Int J Prod Econ 93:301–308
Dobos I (2007) Tradable permits and production-inventory strategies of the firm. Int J Prod Econ 108:329–333
Dockner E, Jorgensen S, Long NV, Sorger G (2000) Differential games and management science. Cambridge University Press, Cambridge
Dockner E, Long N (1993) International pollution control: cooperative versus noncooperative strategies. J Environ Econ Manag 24:13–29
Daskalakis G, Psychoyios D, Markellos R (2009) Modeling \(\text{ CO }_2\) emission allowance prices and derivatives: evidence from the European trading scheme. J Bank Finance 33:1230–1241
Farzin Y, Kort P (2000) Pollution abatement investment when environmental regulation is uncertain. J Public Econ Theory 2(2):183–212
Hall N (2007) Transboundary pollution: harmonizing international and domestic law. Univ Mich J Law Reform 40:681–746
Huang X, He P, Zhang W (2016) A cooperative differential game of transboundary industrial pollution between two regions. J Clean Prod 120:43–52
Kossioris G, Plexousakis M, Xepapadeas A, Zeeuw A, Maler K (2008) Feedback Nash equilibria for non-linear differential games in pollution control. J Econ Dyn Control 32:1312–1331
Li S (2014) A differential game of transboundary industrial pollution with emission permits trading. J Optim Theory Appl 163:642–659
Li S (2016) Dynamic optimal control of pollution abatement investment under emissio permits. Oper Res Lett 44:348–353
List J, Mason C (2001) Optimal institutional arrangements for transboundary pollutants in a second-best world: evidence from a differential game with asymmetric players. J Environ Econ Manag 42:277–296
Lundgren T (2003) A real options approach to abatement investments and green goodwill. Environ Resour Econ 25:17–31
Maler K, Zeeuw A (1998) The acid rain differential game. Environ Resour Econ 12:167–184
Masoudi N, Santugini M, Zaccour G (2015) A dynamic game of emissions pollution with uncertainty and learning. Environ Resour Econ 64:349–372
Seifert J, Uhrig-Homburg M, Wagner M (2008) Dynamic behavior of \(\text{ CO }_2\) spot prices. J Environ Econ Manag 56:180–194
Sethi SP, Thompson GL (2000) Optimal control theory: applications to management science and economics, 2nd edn. Springer, New York
Yeung D (2007) Dynamically consistent cooperative solution in a differential game of transboundary industrial pollution. J Optim Theory Appl 134:143–160
Yeung D, Petrosyan L (2008) A cooperative stochastic differential game of transboundary industrial pollution. Automatica 44:1532–1544
Yi Y, Xu R, Zhang S (2017) A cooperative stochastic differential game of transboundary pollution between two asymmetric nations. Math Probl Eng 2017:9492582
Youssef S (2009) Transboundary pollution, R&D spillovers and international trade. Ann Reg Sci 43:235–250
Zhang S, Wang X, Shananin A (2016) Modeling and computation of mean field equilibria in producers’ game with emission permits trading. Commun Nonlinear Sci Numer Simul 37:238–248
Author information
Authors and Affiliations
Corresponding author
Additional information
This Project was supported in part by the National Basic Research Program (2012CB955804), the Major Research Plan of the National Natural Science Foundation of China (91430108), the National Natural Science Foundation of China (11771322), and the Major Program of Tianjin University of Finance and Economics (ZD1302). The authors gratefully acknowledge the constructive suggestions offered by the referees and the Associate Editor.
Suresh Sethi taught an optimal control course as a visiting professor at the Technical University in Vienna in the summer of 1981. Englelbert Dockner was a student in this course. Over the years, Suresh Sethi had many interactions with Engelbert and his family. We are honored to dedicate to the memory of Engelbert Dockner our paper on a topic to which he contributed significantly.
Appendices
Appendix
A. Proof of Proposition 1
Proof
For \(i=1,2\), we guess the form of the value functions \(V_{\mathrm{Ni}}(P,t)\) to be linear in P, that is,
where \(l_i(t)\) and \(k_i(t)\) are functions of t. Then, we obtain these functions to verify that our guess is correct. By substituting the first-order conditions (6) and (20) into the system of HJB Eq. (5), we have
where
and
Noticing that the system (21) should be satisfied for all \(P\ge 0\), we can determine \(l_1(t)\), \(l_2(t)\), \(k_1(t)\), and \(k_2(t)\) by solving the following system of ordinary differential equations:
Solving the above ODE system, we can obtain
where
Then, the proof can be completed by substituting the above results into (6). \(\square \)
B. Proof of Corollary 1
Proof
-
(i)
Comparing (7b) and (7e) with the two regions’ instantaneous quotas \(E_{10}\) and \(E_{20}\), we can obtain the above mentioned conclusions.
-
(ii)
From Eqs. (7a) and (7d) we know
$$\begin{aligned} \frac{\partial V_{N1}}{\partial P}= & {} \left( \frac{ D}{r+\theta }-g_1\right) e^{-(r+\theta )(T-t)}-\frac{ D}{r+\theta }<0,\\ \frac{\partial V_{N1}}{\partial E_{10}}= & {} \left( e^{\rho _1(T-t)}-e^{-r(T-t)}\right) \frac{e^{-\rho _1T}S}{r+\rho _1}>0,\\ \frac{\partial V_{N2}}{\partial P}= & {} \left( \frac{\beta D}{r+\theta }-g_2\right) e^{-(r+\theta )(T-t)}-\frac{\beta D}{r+\theta }<0, \\ \frac{\partial V_{N2}}{\partial E_{20}}= & {} \left( e^{\rho _2(T-t)}-e^{-r(T-t)}\right) \frac{e^{-\rho _2T}S}{r+\rho _2}>0, \end{aligned}$$which completes the proof of results in (ii).
-
(iii)
Taking derivative on (7a) and (7d) with respect to S, respectively, we have
$$\begin{aligned} \frac{\partial V_{N1}}{\partial S}&=\frac{1}{r}\Big (\frac{C+1}{C}S-A+\frac{2\gamma C+\gamma +1}{\gamma C}\frac{D}{r+\theta }\Big )\Big (1-e^{-r(T-t)}\Big )\\&\quad +\frac{E_{10}e^{-\rho _1 T}}{1+\rho _1}\Big (e^{\rho _1(T-t)}-e^{-r(T-t)}\Big )\\&\quad +\frac{1}{\theta }\frac{2\gamma C+\gamma +1}{\gamma C}e^{-r(T-t)}\Big (\frac{D}{r+\theta }-g_1\Big )\Big (e^{-\theta (T-t)}-1\Big ), \\ \frac{\partial V_{N2}}{\partial S}&=\frac{1}{r}\Big (\frac{\gamma C+1}{\gamma C}S-A+\frac{2\gamma C+\gamma +1}{\gamma C}\frac{\beta D}{r+\theta }\Big )\Big (1-e^{-r(T-t)}\Big )\\&\quad +\frac{E_{20}e^{-\rho _2 T}}{1+\rho _2}\Big (e^{\rho _2(T-t)}-e^{-r(T-t)}\Big )\\&\quad +\frac{1}{\theta }\frac{2\gamma C+\gamma +1}{\gamma C}e^{-r(T-t)}\Big (\frac{\beta D}{r+\theta }-g_2\Big )\Big (e^{-\theta (T-t)}-1\Big ), \end{aligned}$$which imply that \(V_{N1}\) and \(V_{N2}\) are two quadratic functions concerning S on the real axis at any time before T, and the minimum points should be \(\phi -\tau _1(t)E_{10}\) and \(\psi -\tau _2(t)E_{20}\), respectively. Also, combining the condition \(0<S<\eta \), which must be satisfied to keep the emissions to be positive, and the condition \(S>0\), we can conclude the results in (iii).\(\square \)
C. Proof of Corollary 2
Proof
Substituting (7b), (7c), (7e) and (7f) into (3), we gain the following ordinary differential equation satisfied by the dynamic process of the pollution stock:
By solving the above equation, we can obtain the trajectory of the pollution stock (8).
Then, taking the derivative of (8) with respect to t, we have
from which the conclusions follow. \(\square \)
D. Proof of Proposition 2
Proof
We first guess that the joint value function \(V_C\) of the two regions is of the form
where \(l_C(t)\) and \(k_C(t)\) are the functions of t. Then, by substituting (10) and (24) into the HJB Eq. (16) satisfied by the joint value function, we obtain
where
Since Eq. (25) holds for every \(P\ge 0\), we have the following system of ordinary differential equations
Solving this ODE system, we obtain
where
\(\square \)
E. Proof of Corollary 3
Proof
-
(i)
Comparing (11b) and (11d) with the two regions’ instantaneous quotas \(E_{10}\) and \(E_{20}\), we can obtain the above conclusions.
-
(ii)
From Eq. (11a), we have
$$\begin{aligned} \frac{\partial V_{C}}{\partial P}= & {} \Big (\frac{(1+\beta )D}{r+\theta }-g_1-g_2\Big )e^{-(r+\theta )(T-t)}-\frac{ (1+\beta )D}{r+\theta }<0,\\ \frac{\partial V_{C}}{\partial E_{10}}= & {} \left( e^{\rho _1(T-t)}-e^{-r(T-t)}\right) \frac{Se^{-\rho _1T}}{r+\rho _1}>0,\\ \frac{\partial V_{C}}{\partial E_{20}}= & {} \left( e^{\rho _2(T-t)}-e^{-r(T-t)}\right) \frac{Se^{-\rho _2T}}{r+\rho _2}>0, \end{aligned}$$which completes the proof of (ii).
-
(iii)
Taking the derivative of (11a) with respect to S, we have
$$\begin{aligned} \frac{\partial V_{C}}{\partial S}&=\frac{1}{r}\Big (\frac{2\gamma C+\gamma +1}{2\gamma C}S-(1+\alpha ) A\\ {}&\quad +\frac{(1+\beta )D}{r+\theta }\frac{2\gamma C+\gamma +1}{2\gamma C}\Big )(1-e^{-r(T-t)})\\&\quad +\frac{1}{\theta }\frac{2\gamma C+\gamma +1}{2\gamma C}e^{-r(T-t)}\Big (\frac{(1+\beta ) D}{r+\theta }-g_1-g_2\Big )\left( e^{-\theta (T-t)}-1\right) \\&\quad +\left( e^{\rho _1(T-t)}-e^{-r(T-t)}\right) \frac{E_{10}e^{-\rho _1T}}{r+\rho _1}+\left( e^{\rho _2(T-t)}-e^{-r(T-t)}\right) \frac{E_{20}e^{-\rho _2T}}{r+\rho _1}, \end{aligned}$$which implies that \(V_{C}\) is a quadratic function of S at any time before T with the minimum point \(\frac{1}{2}({\bar{\phi }}-\tau _{C1}(t)E_{10}-\tau _{C2}(t)E_{20})\). Also, combining the condition \(0<S<{\bar{\eta }}\), which must be satisfied to keep the emissions nonnegative, and the condition \(S>0\), we can conclude (iii). \(\square \)
F. Proof of Corollary 4
Proof
Substituting (11b), (11c), (11d) and (11e) into (3), we have the following ordinary differential equation for the dynamics of the pollution stock in the cooperative game:
Its solution gives the trajectory of the pollution stock (12). Moreover, taking its derivative with respect to t gives
from which the results follow directly. \(\square \)
G. Numerical Method for (16)
Since the structure of HJB equations arising from the noncooperative case is similar to that of the cooperative one, here we only discuss the latter to save space.
From the first-order optimality condition, we know that Eq. (16) can split into the following coupled equations:
1.1 The Fitted Finite Volume Method for Spatial Discretization
A defined mesh for \((P_{\min },P_{\max }) \times (S_{\min },S_{\max })\) is significant in the process of discretization. So, we first divide the intervals \(I_{P}\) and \(I_{S}\) into \(N_P\) and \(N_S\) subintervals, respectively:
in which
Thus, a mesh on \(I_P \times I_S\), whose all mesh lines are perpendicular to the axes, is defined. Next we define another partition of \(I_P \times I_S\) by letting
for any \(i=1,2,\ldots ,N_P-1\) and \(j=1,2,\ldots ,N_S-1\). To keep completeness, we also define \(P_{-\frac{1}{2}}=P_{\min }\), \(P_{N_P+\frac{1}{2}}=P_{\max }\), \(S_{-\frac{1}{2}}=S_{\min },\) and \(S_{N_S+\frac{1}{2}}=S_{\max }\). The step sizes are defined by \(h_{P_i}=P_{i+\frac{1}{2}}-P_{i-\frac{1}{2}}\) and \(h_{S_j}=S_{j+\frac{1}{2}}-S_{j-\frac{1}{2}}\) for each \(i=0,1,\ldots ,N_P\) and \(j=0,1,\ldots ,N_S\).
Then, for the purpose of formulating finite volume scheme, we write Eq. (16) in the following divergence form:
where
It follows from integrating Eq. (29) over \({\mathcal {R}}_{i,j}=[S_{i-\frac{1}{2}},S_{i+\frac{1}{2}}]\times [\delta _{j-\frac{1}{2}},\delta _{j+\frac{1}{2}}]\) and applying the midpoint quadrature rule to the resulting equation that
for \(i=1,2,\ldots ,N_P-1\), \(j=1,2,\ldots ,N_S-1\), where \(R_{i,j}=(P_{i+\frac{1}{2}}-P_{i-\frac{1}{2}})\times (S_{j+\frac{1}{2}}-S_{j-\frac{1}{2}})\), \(c_{i,j}=c(P_i,S_j,t)\), \(V_{C_{i,j}}=V_C(P_i,S_j,t),\) and \(F_{C_{i,j}}=F_C(P_i,S_j,E^*_{C1},E_{C2}^*,a^*_{C1},a_{C2}^*,t)\).
The approximation of the second term in Eq. (31) is the key and difficult point of this numerical method. According to the definition of flux \(A \nabla V_C+{\underline{b}}V_C\) and integrating by parts, we have
where l denotes the unit vector outward-normal to \(\partial {\mathcal {R}}_{i,j}\). We approximate the first integral of Eq. (32) by a constant:
Now, we are in the position to derive the approximations to \((a_{11}\frac{\partial V_C}{\partial P}+a_{12}\frac{\partial V_C}{\partial S}+b_1V_C)\) at the midpoint, \((P_{i+\frac{1}{2}},S_j)\), of the interval \(I_{P_i}\) for any \(i=0,1,\ldots ,N_P-1\). To begin with, the term \(a_{11}\frac{\partial V_C}{\partial P}+b_1V_C\) can be approximated by a constant, which means that its derivative equals zero, that is,
where \(a=\frac{1}{2}\sigma _P^2\) and \(b_1^{i+\frac{1}{2},j}=b_1(P_{i+\frac{1}{2}},S_j)\), \(V_{C_{i,j}}\) and \(V_{C_{i+1,j}}\) denote the values of \(V_C\) at \((P_i,S_j)\) and \((P_{i+1},C_j)\), respectively. The above first-order ordinary differential equation can be solved by integrating both sides of Eq. (33a):
where \(C_1\) is an arbitrary constant and can be determined by the boundary conditions Eq. (33b) as follows:
where \(\alpha _{i,j}=\frac{b_1^{i+\frac{1}{2},j}}{a}\). Additionally, the derivative \(\frac{\partial V_C}{\partial S}\) can be approximated by a forward difference
As a result, we have
where \(d=\frac{1}{2}\rho \sigma _P\sigma _SPS\) and \(d_{i,j}=d(P_i,S_j)\). Applying the similar method to the other three terms of Eq. (32), we get the following results:
and
where \({\bar{\alpha }}_{i,j}=\frac{{\bar{b}}_{i,j+\frac{1}{2}}}{{\bar{a}}_j}\), \({\bar{a}}=\frac{1}{2}\sigma _S^2\), \({\bar{b}}=\mu -\sigma _S^2-\frac{1}{2}\rho \sigma _P\sigma _S\), and \({\bar{d}}_{i,j}=\frac{1}{2}\rho \sigma _P\sigma _S P_{i}\). Hence, we obtain the following equations by combining Eqs. (31), (32), and (34)–(37):
where
for \(i=1,2,\ldots ,N_P-1\), \(j=1,2,\ldots ,N_S-1\). The other elements \(e^{i,j}_{m,n}\) equal zeros when \(m\ne i-1,i,i+1\) and \(n \ne j-1,j,j+1\). We can see that system (38) is an \((N_P-1)^2 \times (N_S-1)^2\) linear system of equations for
Note that \(V_{C_{0,j}}(t),V_{C_{i,0}}(t),V_{C_{0,N_S}}(t),\) and \(V_{C_{N_P,0}}(t)\) for \(i=1,2,\ldots ,N_P\) and \(j=1,2,\ldots ,N_S\) equal to the given boundary conditions. Obviously, the coefficient matrix of system (38) is pentadiagonal.
1.2 The Implicit Difference Method for Time Discretization
Next we embark on the time discretization of system (38). To this purpose, we first rewrite Eq. (38) as
where
for \(i=1,2,\ldots ,N_P-1\) and \(j=1,2,\ldots ,N_S-1\). We select \(M-1\) points numbered from \(t^1\) to \(t^{M-1}\) between 0 and T, and let \(T=t^0\), \(t^M=0\) to form a partition of time \(T=t^0>t^1>\cdots >t^M=0\). Then, the full discrete form of Eq. (42) can be obtained by applying the two-level implicit time-stepping method with a splitting parameter \(\theta \in [\frac{1}{2},1]\) to it:
where
for \(m=0,1,\ldots ,M-1\). Note that \(\Delta t^m=t^{m+1}-t^m<0\), and \(V_C^m\) denotes the approximation of \(V_C\) at \(t=t^m\). Particularly, when we set \(\theta =\frac{1}{2}\), the scheme (43) becomes the famous Crank–Nicolson scheme and is second-order accuracy; when we set \(\theta =1\), the scheme (43) becomes the backward Euler scheme and is first-order accuracy.
1.3 Decoupling of the System
In the above discussion, we have assumed that the control variables \(E_{C1}^*\), \(a_{C1}^*\), \(E_{C2}^*\), and \(a_{C2}^*\) are known. However, we can see from (43) that they are coupled with \(V_C\) when \(\theta \ne 0\). To deal with this dilemma, we replace \(E_{C1}^*(t^{m+1})\), \(a_{C1}^*(t^{m+1})\), \(E_{C2}^*(t^{m+1})\), and \(a_{C2}^*(t^{m+1})\) by \(E_{C1}^*(t^{m})\), \(a_{C1}^*(t^{m})\), \(E_{C2}^*(t^{m})\), and \(a_{C2}^*(t^{m})\), respectively. This method should be reasonable because the control variables are just replaced by their values in the previous time step. The error is small if \(\Delta t^m\) is sufficiently small. The resulting system corresponding to (43) is as follows:
Rights and permissions
About this article

Cite this article
Chang, S., Sethi, S.P. & Wang, X. Optimal Abatement and Emission Permit Trading Policies in a Dynamic Transboundary Pollution Game. Dyn Games Appl 8, 542–572 (2018). https://doi.org/10.1007/s13235-018-0260-z
Published:
Issue Date:
DOI: https://doi.org/10.1007/s13235-018-0260-z