
Abstract
The present paper deals with analysis of reliability characteristics of a two-unit parallel system under classical and Bayesian set ups. The system consists of two non-identical units arranged in parallel configuration. System failure occurs when both the units stop functioning. Failure and repair time distributions of each unit are taken as Weibull with common shape parameter but different scale parameters. Using regenerative point technique, various measures of system effectiveness useful to system designers and operating managers have been obtained. Further, since the life testing experiments are time consuming and as such the parameters representing the reliability characteristics of the system/unit are assumed to be random variables. Therefore, a Monte Carlo simulation study is also carried out to illustrate the results for considered system model.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
In real life situations the systems are becoming complex day by day due to their automation and ever increasing demand of society. The improvement in effectiveness in respect of reliability, availability and net expected profit has therefore become important in recent years. Incorporation of redundancy is one of the methods to enhance the reliability of such types of systems. Standby redundant systems (Goel et al. 1983, 1985a, b; Goyal and Murari 1984; Gupta et al. 1983, 1986, 1988) have been analyzed under different set of assumptions such as random shocks, delayed replacement in repair and post repair, two types of operation and repair and imperfect switch etc., Gupta and Chaudhary (1992) also analysed a two non-identical priority unit cold standby system model by taking Rayleigh distribution only of the failure time of non-priority unit. But, sometimes when standby system takes some significant time to start the operation due to imperfect or slow switching device, then it will be wisable to use redundant unit in parallel form with the main unit so that the system does not fail if the main operative unit fails. Keeping this fact in view, Malik et al. (2000) analyzed a two unit parallel system by giving the priority in repair to main unit over the inspection to duplicate unit. Gupta and Shivakar (2003) dealt with the analysis of a two-unit parallel system assuming the concept of waiting time of repairman. Chaudhary et al. (2007) analyzed two unit parallel system model in which the repair of failed unit is completed in one or two phases. It is worth mentioning here that all the above system models were analyzed by using regenerative point technique. Regenerative point technique or regenerative process is a stochastic process with time points at which the process probabilistically restarts. It was first introduced by Smith (1955). Brkic (1990) dealt with the interval estimation of the parameters of Weibull distribution. Seo et al. (2003) estimated lifetime and reliability of a repairable redundant system subject to periodic alternation. Yadavalli et al. (2005) analyzed a two component system with common cause shock failure under Bayesian set up. However, most of the above studies were mainly concerned to obtain various reliability characteristics such as mean time to system failure (MTSF), point wise and steady state availabilities etc., by using exponential distribution as failure and repair time distribution of units and not to estimate the parameter(s) involved in the life time/repair time distribution of system/unit.
The purpose of the present paper is to analyze a two non-identical unit parallel system model by using Weibull distribution for both failure and repair times with common shape parameter but different scale parameters. For a more concrete study of the system model, a simulation study is also carried out.
We evaluate the following reliability characteristics of interest to system designers as well as operating managers by using regenerative point technique.
-
1.
Steady state transition probability and mean sojourn times in different states.
-
2.
Reliability of the system and MTSF.
-
3.
Pointwise and steady state availabilities of the system.
-
4.
Expected busy period of the repairman in time interval (0, t) and in steady state.
-
5.
Net expected profit incurred by the system in time interval (0, t) and in steady state.
Further, since no system/unit is perfect, it may fail any time so parameter representing the life time of the system/unit is assumed to be a random variable. Therefore, a simulation study is conducted for analyzing the considered system model both in classical and Bayesian set ups. The Monte Carlo simulation technique has been used in conducting the numerical study. In classical setup, the maximum likelihood (ML) estimates of the parameters involved in the model and reliability characteristics along with their standard errors (SE) and width of confidence intervals are obtained. In Bayesian setup, Bayes estimates of the parameters and reliability characteristics along with their posterior standard errors (PSE) and width of highest posterior density (HPD) intervals are computed. In the end, the comparative conclusions are drawn to judge the performances of the MLE and Bayes estimates.
2 System model description, notations and states of the system
The system consists of two non-identical units (unit-1 and unit-2) arranged in parallel network. Each unit has two modes—Normal (N) and Total failure (F). Initially system starts its functioning from state S0 in which both the units are in normal mode and operative. When system operates with only one unit then the operative unit has increased failure rate in comparison to the situation when both the units are operative. The system failure occurs when both the units stop functioning. A single repairman is always available with the system to repair a failed unit on First Come First Served (FCFS) basis. Each repaired unit works as good as new. The failure and repair time distributions of each unit are taken to be independent having the Weibull density with common shape parameter ‘p’ but different scale parameters α and β as follows:
and
where t ≥ 0; αi and βi, p > 0 and i = 1, 2 respectively for unit-1 and unit-2.
A real life example based on the system model under study may be visualized as power supply in a colony by two transformers: transformer-1 and transformer-2 may be considered as unit-1 and unit-2 respectively. Both transformers are connected in parallel configuration. Transformer-1 and Transformer-2 fails with failure rates h1 (.) and h2 (.). When transformer-1 has failed, then complete load falls on transformer-2 and therefore, transformer-2 fails with increased failure rate r2 (.) > h2 (.). Similarly, when transformer-2 fails, then increased failure rate of transformer-1 is taken as r1 (.) > h1 (.).
2.1 Notations
- E:
-
Set of regenerative states = {So, S1, S2}
- αi/ βi (i = 1, 2):
-
Scale parameter of failure/repair time distribution for ith unit
- p:
-
Shape parameter of failure/repair time distribution of each unit
- hi(t):
-
Failure rate of ith unit when both the units are operative in parallel network; \( {\text{h}}_{\text{i}} \left( {\text{t}} \right) = {{\upalpha}}_{\text{i}} {\text{pt}}^{{{\text{p}} - 1}} ,\quad {{\upalpha}}_{\text{i}} ,{\text{ p}},{\text{ t}} > 0 \)
- ri(t):
-
Increased failure rate of ith unit having the form; \( {\text{r}}_{\text{i}} \left( {\text{t}} \right) = {{\upmu}}_{\text{i}} {\text{pt}}^{{{\text{p}} - 1}} ;\quad {{\upmu}}_{\text{i}} ,{\text{ p}},{\text{ t}} > 0 \)
- ji(t):
-
Repair rate of ith unit; \( {\text{j}}_{\text{i}} \left( {\text{t}} \right) = {{\upbeta}}_{\text{i}} {\text{pt}}^{{{\text{p}} - 1}} ,\quad {{\upbeta}}_{\text{i}} ,{\text{ p}},{\text{ t}} > 0 \)
- \( {{{\text{q}}_{\text{ij}} \left( \cdot \right)} \mathord{\left/ {\vphantom {{{\text{q}}_{\text{ij}} \left( \cdot \right)} {{\text{Q}}_{\text{ij}} \left( \cdot \right)}}} \right. \kern-0pt} {{\text{Q}}_{\text{ij}} \left( \cdot \right)}} \) :
-
Pdf and cdf of one step or direct transition time from \( {\text{S}}_{i} \in {\text{E}} \) to \( {\text{S}}_{\text{j}} \in {\text{E}} \)
- \( {\text{p}}_{\text{ij}} \) :
-
Steady state transition probability from state \( {\text{S}}_{\text{i}} \) to \( {\text{S}}_{\text{j}} \) such that, \( {\text{p}}_{\text{ij}} = \mathop { \lim }\limits_{{{\text{t}} \to \infty }} {\text{Q}}_{\text{ij}} ({\text{t}}) \)
- \( {\text{p}}_{\text{ij}}^{{ ( {\text{k)}}}} \) :
-
Steady state transition probability from state \( {\text{S}}_{\text{i}} \) to \( {\text{S}}_{\text{j}} \) via \( {\text{S}}_{\text{k}} \) such that, \( {\text{p}}_{\text{ij}}^{{ ( {\text{k)}}}} = \mathop { \lim }\limits_{{{\text{t}} \to \infty }} {\text{Q}}_{\text{ij}}^{{\left( {\text{k}} \right)}} ({\text{t}}) \)
- Zi (t):
-
Probability that system sojourns in state Si up to time t
- \( {{\uppsi}}_{\text{i}} \) :
-
Mean sojourn time in state \( {\text{S}}_{\text{i}} \) i.e., \( \psi_{\text{i}} = \int_{0}^{\infty } {{\text{P}}[{\text{T}}_{\text{i}} > {\text{t}}]{\text{dt}}} \)
- \( {\text{R}}_{\text{i}} \left( {\text{t}} \right) \) :
-
Reliability of the system at time t when system starts from \( {\text{S}}_{\text{i}} \in {\text{E}} \)
- \( {\text{A}}_{\text{i}} \left( {\text{t}} \right) \) :
-
Probability that the system will be operative in state \( {\text{S}}_{\text{i}} \in {\text{E }} \)at epoch t
- \( {\text{B}}_{\text{i}} \left( {\text{t}} \right) \) :
-
Probability that the repairman will be busy in state \( {\text{S}}_{\text{i}} \in {\text{E}} \) at epoch t
- \( {{\upmu}}_{\text{up}} ({\text{t}}) \) :
-
Expected up time of the system during interval (0, t) i.e., \( {{\upmu}}_{\text{up}} ({\text{t}}) = \int_{0}^{\text{t}} {{\text{A}}_{0} ({\text{u}}){\text{du}}} \)
- \( {{\upmu}}_{\text{b}} \left( {\text{t}} \right) \) :
-
Expected busy period of repairman during interval (0, t) i.e., \( {{\upmu}}_{\text{b}} \left( {\text{t}} \right) = \int_{0}^{\text{t}} {{\text{B}}_{0} ({\text{u}}){\text{du}}} \)
- \( {\text{P}}\left( {\text{t}} \right) \) :
-
Profit incurred by the system during interval (0, t)
- \( * \) :
-
Symbol for Laplace Transform of a function i.e., \( {\text{q}}_{\text{ij}}^{ *} = \int_{0}^{\infty } {{\text{e}}^{{ - {\text{st}}}} {\text{q}}_{\text{ij}} ({\text{t}}){\text{dt}}} \)
- \( \cdot \) :
-
Regenerative point
- \( \times \) :
-
Non-regenerative point
2.2 Symbols for the states of the system
- \( {\text{N}}_{{ 1 {\text{o}}}} \) :
-
Unit-1 is in N-mode and operative
- \( {\text{N}}_{{ 2 {\text{o}}}} \) :
-
Unit-2 is in N-mode and operative
- \( {\text{F}}_{{ 1 {\text{r}}}} \) :
-
Unit-1 is in F-mode and under repair
- \( {\text{F}}_{{ 2 {\text{r}}}} \) :
-
Unit-2 is in F-mode and under repair
- \( {\text{F}}_{{ 1 {\text{w}}}} \) :
-
Unit-1 is in F-mode and waiting for repair
- \( {\text{F}}_{{ 2 {\text{w}}}} \) :
-
Unit-2 is in F-mode and waiting for repair
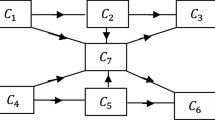
Using these symbols and assumptions stated earlier, the transition diagram of the system model along with all possible states and transitions is shown in Fig. 1. From Fig. 1, we observe that the states S0, S1 and S2 are up states and S3 and S4 are failed states. We also observe that states S3 and S4 are non-regenerative since epochs of entrance from state S1 to S3 and S2 to S4 are non-regenerative whereas the other states are regenerative states.

Transition diagram
3 Transition probabilities and sojourn times
The transition probability matrix (t.p.m) of the embedded Markov Chain is
with non-zero elements.
As an illustration, to obtain \( {\text{p}}_{01} \), the probability that the system transits from state \( {\text{S}}_{0} \) to \( {\text{S}}_{1} \) during time interval (0, ∞) we observe as followsFootnote 1 : \( {\text{p}}_{01} \) = ∫[probability that the operating unit-1 in state \( {\text{S}}_{0} \) fails during time (t, t + dt) and unit-2 does not fail up to time t]dt. Thus
Similarly,
and the other elements of t.p.m will be zero.
It can be easily verified that
The mean sojourn time \( \psi_{i} \) in state Si is defined as the expected time for which the system stays in state Si before transiting to any other state. If \( {\text{T}}_{\text{i}} \) is the sojourn time in state \( {\text{S}}_{\text{i}} \), then mean sojourn time in state \( {\text{S}}_{\text{i}} \) is given by,
As an illustration, to obtain \( \psi_{0} \), we observe as follows: \( \psi_{0} \) = ∫[probability that the operating unit-1 and unit-2 in state \( {\text{S}}_{0} \) do not fail up to time t] dt.
Similarly
4 Analysis of characteristics
4.1 Reliability and MTSF
Let the random variable “Ti” be the time to system failure (TSF) when the system starts from \( S_{i} \in \,E \), then the reliability of the system is given by
To determine the reliability of the system, we regard the failed states of the system as absorbing states i.e., those states in which system once reaches, remain there forever. By simple probabilistic arguments, we have the following recursive relations among Ri(t)’s (i = 0, 1, 2).
where,
\( {\text{Z}}_{0} ({\text{t}}) = {\text{e}}^{{ - (\alpha_{1} + \alpha_{2} ){\text{t}}^{\text{p}} }} ,\;{\text{Z}}_{1} ({\text{t}}) = {\text{e}}^{{ - (\beta_{1} + \mu_{2} ){\text{t}}^{\text{p}} }} \) and \( {\text{Z}}_{2} ({\text{t}}) = {\text{e}}^{{ - (\beta_{2} + \mu_{1} ){\text{t}}^{\text{p}} }} \)
Taking the Laplace Transforms of relations (3, 4, 5) and simplifying for \( {\text{R}}_{ 0}^{ *} ( {\text{s)}} \), omitting the argument ‘s’ for brevity, we get
where
Taking the inverse Laplace Transform (ILT) of Eq. (6), we can get the reliability of the system when system starts from state S0.
The MTSF can be obtained by using the well known formula-
Now using the results \( {\text{q}}_{\text{ij}}^{*} (0) = {\text{p}}_{\text{ij}} \) and Zi*(0) = \( \psi_{\text{i}} \), we get
4.2 Availability analysis
Let us define Ai(t) as the probability that the system is up at time t when initially it starts from regenerative state \( {\text{S}}_{\text{i}} \in \,{\text{E}} \). By simple probabilistic arguments, we have the following recursive relation among Ai (t)’s (i = 0, 1, 2).
Taking the Laplace Transform of relations (8, 9, 10) and simplifying for \( {\text{A }}_{ 0}^{ *} ( {\text{s)}}\, \), omitting the argument ‘s’ for brevity, we get
where,
and
Taking the Inverse Laplace Transform of (11), we can get availability of the system when it starts from state S0 for known values of the parameters.
In the long run, the steady state probability that the system will be operative, is given by,
where,
and
where
and
are the mean repair times of unit-1 and unit-2 respectively.
The expected up time of the system during (0, t) is given by-
So that
4.3 Busy period analysis
Let us define Bi(t) as the probability that the repairman is busy in repair of a failed unit at epoch t when the system starts from state \( {\text{S}}_{\text{i}} \in \,{\text{E}} \). Using the probabilistic arguments, we have the following recursive relation among Bi(t)’s(i = 0, 1, 2).
Taking the Laplace Transform of relations (14, 15, 16) and solving for B *0 (s), omitting the argument ‘s’ for brevity, we get
where,
and D2(s) is same as given in availability analysis.
Taking Inverse Laplace Transform of (17), we can get the probability that the repairman will be busy at a particular epoch for known values of the parameters.
In the long run, the probability that the repairman will be busy in repair of failed unit is given by
where,
and D2 is same as given in availability analysis.
The expected busy period of the repairman in repair during (0, t) is given by
So that,
4.4 Profit function analysis
Let us define
- C0 :
-
= revenue (in Rs.) per-unit up time of the system
- C1 :
-
= cost (in Rs.) per unit time when the repairman is busy in repair of a failed unit
Then, net expected profit incurred by the system during time interval (0, t) is given by
The net expected profit per-unit time incurred by the system in steady-state is given by
Where A0 and B0 have been given in (12) and (18) respectively.
5 Estimation of parameters, MTSF and profit function
5.1 Classical estimation
The failure, increased failure and repair times of units of system are assumed to be independently Weibull distributed random variables with failure rates h1 (.), h2 (.), increased failure rates r1 (.), r2 (.) and repair rates j1(.), j2(.) respectively.
where
hi(t) = αiptp−1, ri(t) = μiptp−1, and ji(t) = βiptp−1; t ≥ 0, αi, βi, μi, p > 0 (i = 1, 2)
Here αi, βi, μi are scale parameters and p is the shape parameter.
In our study, we are interested with the ML estimation procedure as one of the most important classical procedures.
5.1.1 ML estimation
Let
be six independent random samples of sizes ni (i = 1, 2, 3, 4, 5, 6) drawn from Weibull distribution with failure rates h1 (.), h2 (.), r1 (.), r2 (.) and repair rates j1 (.), j2 (.) respectively.
The likelihood function of the combined sample is
Where,
By using usual maximization likelihood approach, the M.L. estimates (say \( \hat{\alpha }_{1} ,\hat{\alpha }_{2} ,\hat{\mu }_{1} ,\hat{\mu }_{2} ,\hat{\beta }_{1} ,\hat{\beta }_{2} \)) of the parameters \( \alpha_{1} ,\alpha_{2} ,\mu_{1} ,\mu_{2} ,\beta_{1} ,\beta_{2} \) are
Thus, by using the invariance property of MLE, the MLEs of MTSF and profit function, say, \( {\hat{\text{M}}}\,{\text{and}}\,{\hat{\text{P}}} \) can be obtained. The asymptotic sampling distribution of
where I denotes the Fisher information matrix with diagonal elements
and non diagonal elements are all zero.
Also, the asymptotic distribution of \( \left( {\,{\hat{\text{M}}} - \,{\text{M}}} \right)\,\sim \,{\text{N}}_{6}\left( {0,\,\,{\text{A}}'\,{\text{I}}^{ - 1} {\text{A}}} \right) \) and \( \left( {{\hat{\text{P}}}\, - \,{\text{P}}} \right)\,\sim \,{\text{N}}_{6}\left( {0,\,{\text{B}}^{\prime}\,{\text{I}}^{ - 1} {\text{B}}} \right) \)
where
5.2 Bayesian estimation
Since the natural family of conjugate priors of scale parameter in case of Weibull distribution when shape parameter is known is a gamma distribution. So in our case, the prior distributions of scale parameters \( \alpha_{1} ,\alpha_{2} ,\mu_{1} ,\mu_{2} ,\beta_{1} ,\beta_{2} \) when the shape parameter p is known are assumed to be gamma with parameters (ai, bi)(i = 1, 2, 3, 4, 5, 6) and are given as follows:
Here the parameters of prior distributions are called hyper parameters. Using the likelihood function in (22) and prior distribution of α1, α2, μ1, μ2, β1, β2 (24, 25, 26, 27, 28, 29) the posterior distributions of these parameters are obtained as follows:
Under squared error loss function, Bayes estimates of \( \alpha_{1} ,\alpha_{2} ,\mu_{1} ,\mu_{2} ,\beta_{1} ,\beta_{2} \)are respectively the means of posterior distribution given in Eqs. (30, 31, 32, 33, 34, 35, 36) and are as follows:
6 Simulation study
We obtained, in the above section, MLE and Bayes estimates of scale parameters α1, α2, μ1, μ2, β1, β2 when the shape parameter p is known and hence the estimates of MTSF and profit function. In order to assess the statistical performances of these estimates, a simulation study is also conducted. The SE/PSE of the estimates and width of confidence/HPD intervals are used for comparison purpose. Random samples of sizes n1 = n2 = n3 = n4 = n5 = n6 = 180 have been drawn from the Weibull distribution for various values of parameters and based on these samples, the ML estimates of the MTSF and profit function are obtained. For Bayesian estimation of parameters, we generated 10,000 realizations from the posterior densities. Bayes estimates of the parameters with gamma priors are obtained by setting the values of hyper parameters as \( \alpha_{ 1} = {\text{b}}_{ 1} /{\text{a}}_{ 1} ; \alpha_{2} = {\text{b}}_{2} /{\text{a}}_{2} ; \mu_{ 1} = {\text{b}}_{3} /{\text{a}}_{3} ; \mu_{2} = {\text{b}}_{4} /{\text{a}}_{4} ;\beta_{ 1} = {\text{b}}_{5} /{\text{a}}_{5} ;\beta_{2} = {\text{b}}_{6} /{\text{a}}_{6} \). The results of simulation study have been summarized in Tables 1, 2, 3, 4, 5, 6. All calculations are performed by using R.2.14.2 Software.
For a more concrete study of the system behavior, by using values (Tables 1, 2, 3), we plot curves for true MTSF, its MLE and Bayes estimate (Figs. 2, 3, 4) w.r.t. failure rate \( \alpha_{1} \) for different values of repair rate β2(0.5,0.6,0.7) while the other parameters are kept fixed (p = 1.0; β1 = 0.4; α2 = 0.9; μ1 = 0.5; μ2 = 0.6).Curves for profit function, its MLE and Bayes estimates are also plotted (Figs. 5, 6, 7) by using values (Tables 4, 5, 6) for the same values of parameters as in case of MTSF and assuming the values of C0 and C1 as (C0 = 100; C1 = 50).

Plot of MTSF for fixed β2 = 0.5 and varying α1

Plot of MTSF for fixed β2 = 0.6 and varying α1

Plot of MTSF for fixed β2 = 0.7 and varying α1

Plot of profit for fixed β2 = 0.5 and varying α1

Plot of profit for fixed β2 = 0.6 and varying α1

Plot of profit for fixed β2 = 0.7 and varying α1
7 Conclusions
According to results obtained in Sect. 6, we observe from Tables 1, 2, 3, that for the fixed values of β2 (0.5, 0.6, 0.7) and p(0.1) MTSF decreases as the failure rate α1 increases. From these tables we also observe that for fixed values of β2 and p , both the SE of ML estimator and PSE of Bayes estimator of MTSF decrease with the increase in α1. Also the SE of ML estimator is smaller than the PSE of Bayes estimator. Besides, the width of HPD intervals is smaller than the width of confidence intervals. Same trends are also observed from Tables 4, 5, 6 in case of profit function. It is also observed from Figs. 2, 3, 4 that MTSF, its MLE and Bayes estimate decrease with the increase in failure rate α1 while all these increase with the increase in repair rate β2. Same trends for profit function are also observed from Figs. 5, 6, 7. Hence, from the above discussion we suggest to use Bayes approach under squared error loss function than classical approach based on ML estimation for estimating the MTSF and profit function for the considered system model.
Notes
The limits of integration are 0 to ∞ whenever not mentioned.
References
Brkic DM (1990) Interval estimation of the parameters β and η of the two parameter Weibull distribution. Microelectron Reliab 30(1):39–42
Chaudhary A, Naresh SK, Varshney G (2007) A two non-identical unit parallel system model with single or double phase(s) of repair. Int J Agric Stat Sci 3(1):249–259
Goel R, Gupta R, Singh SK (1983) Cost analysis of a two unit priority standby system with imperfect switch and arbitrary distribution. Microelectron Reliab 25:56–67
Goel LR, Gupta R, Singh SK (1985a) Cost analysis of a two unit cold standby system with two types of operation and repair. Microelectron Reliab 25:71–75
Goel LR, Gupta R, Singh SK (1985b) Cost analysis of a two unit standby system with delayed replacement and better utilization of unit. Microelectron Reliab 25(1):81–86
Goyal V, Murari K (1984) Cost analysis of a two unit standby system with a regular repairman. Microelectron Reliab 24:453–459
Gupta R, Chaudhary A (1992) A two unit priority standby system subject to random shocks and Rayleigh failure time distribution. Microelectron Reliab 32:1713–1723
Gupta R, Shivakar (2003) A two non-identical unit parallel system with waiting time distribution of repairman. Int J Manage Syst 19(1):77–90
Gupta SM, Jaiswal NK, Goel LR (1983) Stochastic behavior of a two unit cold standby redundant system with three modes and allowed down time. Microelectron Reliab 23:333–336
Gupta R, Bajaj CP, Sinha SM (1986) Cost benefit analysis of multicomponent standby system with inspection and slow switch. Microelectron Reliab 26:879–882
Gupta SM, Jaiswal NK, Goel LR (1988) Switch failure in a two unit standby redundant System. Microelectron Reliab 23:129–132
Malik SC, Bhardwaj RK, Grewel AS (2000) Probabilistic analysis of a system of two non-identical parallel units with priority to repair subject to inspection. J Reliab Stat Stud 3:1–11
Seo JH, Jang JS, Bai DS (2003) Life time and reliability estimation of repairable redundant system subject to periodic. RESS 80:197–204
Smith WL (1955) Regenerative stochastic processes. Proc R Soc A 232(1188):6–13. doi:10.1098/rspa.1955.0198
Yadavalli VSS, Bekker AS, Paun J (2005) Bayesian study of a two-component system with common cause shock failures. Asia Pac J Oper Res 21(1):105–119
Acknowledgments
The authors are highly thankful to the learned reviewers and editor for their constructive comments and suggestions to improve the quality of the paper.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Kishan, R., Jain, D. Classical and Bayesian analysis of reliability characteristics of a two-unit parallel system with Weibull failure and repair laws. Int J Syst Assur Eng Manag 5, 252–261 (2014). https://doi.org/10.1007/s13198-013-0154-9
Received:
Revised:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s13198-013-0154-9