
Abstract
Autonomous navigation is a significant segment of mobile robotics, and for reliable autonomous navigation, optimal trajectory planning is the fundamental requirement. In mobile robotics, planning algorithms are implemented to attain optimality in trajectory planning by solving the problems such as path length minimization, smoother trajectories, low computational load, time/ space complexity, etc., that degrade the performance of the path planning technique. This research paper primarily focuses on generating smooth trajectories with the shortest path length by linking the Bidirectional Rapidly exploring Random Tree (B-RRT) with a modified Bezier curve technique termed Smooth-BRRT (S-BRRT). The proposed S-BRRT technique generates smoother trajectories by considering the high number of control points associated with the Bezier curve technique. The selection criteria for control points will be adaptive, which means the number of control points may increase or decrease depending upon the path length, grid cell size, mobile robot dimension, maximum acceleration of mobile robot, etc. The proposed S-BRRT technique is implemented in various simulated environments, and it is experimentally obtained that the path length is reduced by 15.03%, the number of sharp turns is reduced by 100%, and time lag is reduced by 27.01%. The proposed S-BRRT technique is also trialed and tested in various real-world experiments. The result shows a 100% reduction in the collision, the time lag is reduced by 66.23%, and the velocity error is reduced to 57.52%, concerning the results obtained with renowned conventional approaches.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Path planning is a crucial segment of mobile robotics that generates a pathway for the mobile robot to navigate in the environment from the start to the goal position [1,2,3]. Path planning techniques make sure that the path generated should be shortest, obstacle-free, smoother, low in computational load, fastest, etc. [3,4,5]. The area of mobile robotics consists of many path planning techniques and based on the level of intelligence, path planning techniques are classified into two sections traditional and intelligent path planning techniques [5,6,7]. The traditional path planning techniques are A*, D*, modified versions of A* and D*, Rapidly Exploring Random Trees (RRT), etc. whereas; the intelligent path planning techniques are Ant Colony Optimization, Genetic algorithms, Particle Swarm Optimization, Neural Network, Fuzzy, etc. [2, 4, 7,8,9,10]. This research focuses on the modification and implementation of traditional Bidirectional RRT algorithm because of the advantages such as fast convergence, reliability, consistency, ease of implementation in 2D and 3D navigation, etc. [2, 7]. The traditional RRT path planning technique provides quite a decent solution to the problems associated with generating a path for the navigation of mobile robots but, the generated path consists of a very large number of sharp turns/curves. These sharp turns put a time delay in the mobile robot’s navigation as the mobile robot must adjust its acceleration to follow the generated trajectory. This stated limitation of the traditional RRT is transformed into a useful tool by linking it with the proposed modified Bezier Curve technique. The conventional Bezier curve uses the number of sharp turns as the control points for the generation of a smooth trajectory however, the number of sharp turns may vary as the complexity of the environment is increased. Therefore, a new technique is proposed that relies on the conventional methodology of selecting the control \({CP}_{x,y}\)(control point w.r.t conventional Bezier curve technique) associated with the number of sharp turns and in between two adjacent control points various new controls points \({TCP}_{x,y}\) (adaptive control point w.r.t proposed S-BRRT technique) is added in the trajectory at the Threshold Distance \({TD}_{x,y}\). The control point based on \({TD}_{x,y}\) is selected w.r.t grid size, mobile robot dimension, grid cell size, distance between two control points generated by the traditional B-RRT, etc. The \({CP}_{x,y}\) and \({TCP}_{x,y}\) are added to increase the number of control points which resulted in smooth trajectory planning with the implementation of Bezier curve technique. The traditional B-RRT (Bidirectional Rapid exploring Random Trees) is linked with the newly developed Bezier curve technique that use the combination of \({CP}_{x,y}\) as well as \({TCP}_{x,y}\) and this combination is tested in various trials setup. It is experimentally obtained that the proposed S-BRRT provide a very good solution in term of generating smooth trajectory planning. The proposed S-BRRT is also linked with various other renowned techniques such as Genetic algorithm, Improved Genetic algorithm, Improved B-RRT and it is experimentally obtained that the path generated via linking S-BRRT with these stated techniques is smooth and shortest. The reliability of the proposed S-BRRT is also ensured by performing real-world experiments and comparing the results (in terms of error analysis, velocity, and time analysis) obtained by the proposed technique with the results obtained by implementing other renowned conventional path planning techniques. The proposed S-BRRT technique is quite a useful tool for solving the problems of trajectory planning in various areas such as unmanned ground/air/underwater vehicles, manipulator trajectory planning, driverless car, etc. [2,3,4,5].
2 Literature review
Optimal path planning techniques provide a proficient tool for solving the issues related to trajectory planning in a constrained environment. The field of robotics is packed with several path planning techniques such as Genetic algorithms, A* with its improved versions, RRT/ RRT*, Particle Swarm Optimization, Bacterial Foraging Optimization, Ant Colony Optimization, Probabilistic Road Map, etc. for achieving the optimal trajectory planning [3,4,5, 11,12,13,14,15,16]. These stated techniques provide quite a decent solution in achieving the shortest path to reach the destination; still an issue like path smoothness is of a significant concern [12, 13]. While implementing these stated path planning techniques, the trajectory contains a lot of sharp turns and curves that result in time delay during the navigation of the mobile robot [10]. The techniques such as the Bezier curve, B-Spline methods, Cubic Splines, etc., are implemented in the past with the path planning techniques for making the path smoother. These techniques provide proficient results in a low complexity environment. However, as the complexity of the environment increases, the reliability of the stated techniques become degraded. As per the literature, the Bezier techniques provide better results than B-Spline and Cubic Spline; the traditional Bezier Curve uses sharp turns as the control points for the trajectory modification [10]. Therefore, the reliability of the Bezier curve depends upon the number of control points. If the numbers of control points are low, the trajectory converges with a large curve, resulting in the mobile robot's collisions during navigation. This limitation is targeted in the proposed research in which the number of control points are increased w.r.t a threshold distance that is linked with various other parameters such as path length, the distance between two control points, grid size, mobile robot dimension, etc. for the generation of smooth trajectory planning.
2.1 Significance of the research
The proposed research work is focused on generating smoother trajectory planning and has the following significance in the field of autonomous mobile robotics:
-
Reduce the number of sharp turns/curves to avoid the zigzag motion of the mobile robot in a constrained environment.
-
Modification and implementation of the traditional Bezier technique for the generation of smoother trajectory planning in a complex environment.
-
Reduction in the time lag during the navigation of mobile robots in the environment as the generated trajectory is smoother.
-
An increase in the velocity of the mobile robot while following the smooth trajectories resulted in the time-efficient navigation of the mobile robot.
-
The proposed technique is linked with various renowned techniques for generating smooth trajectories for the reliable autonomous navigation of mobile robots.
3 Problem identification in conventional RRT and bidirectional RRT
The traditional RRT and Bidirectional RRT are the two high-quality path planning techniques in mobile robotics, and these techniques rely on the node’s generation and selection [10, 11]. As the starting and goal position is entered, both techniques will generate random nodes in the environment and try to find the linked nodes to generate the path to reach the destination node. To carry forward the research, a comparative analysis between RRT and B-RRT is done based on various parameters such as the number of sharp turns, path length, and execution time to select the superior path planning technique between RRT and B-RRT. To perform the comparative analysis, ten different test arenas are constructed in MATLAB with manually added starting (green) and goal (red) coordinates as shown in Fig. 1 (only for test arena shown). Based on performance analysis of the RRT and B-RRT path planning techniques in these test arenas, it is experimentally obtained that the B-RRT provides better results as compared to RRT as shown in Table 1. With the implementation of B-RRT, the path length is reduced to 5.86%, the execution time is reduced to 21.94%, and the number of turns is reduced to 9.96% with respect to the implementation of the traditional RRT as shown in Table 1. The traditional B-RRT provides better results concerning the traditional RRT techniques still, the B-RRT technique is not the optimal path planning technique for the generation of smooth trajectories to achieve time-efficient navigation of mobile robots as discussed in the next section.

Simulation results based on comparative analysis of traditional RRT with B-RRT
3.1 Limitation of the B-RRT technique
As per the performance analysis in Sect. 3, the traditional B-RRT performs better than the traditional RRT algorithm, but the B-RRT technique still suffers from various issues such as high number of sharp turns/ curves. During the navigation of the mobile robot, it must follow the preplanned trajectory generated by the path planning technique. However, if the path contains sharp turns, the mobile robot must regulate its acceleration to trail that generated trajectory which resulted in the time lag (time delay in reaching the destination) to reach at the destination coordinates. The minimum time delay (least time taken w.r.t optimal path) in reaching the destination is a vital requirement in the autonomous navigation of mobile robots. The trajectories generated by the traditional RRT and B-RRT consist of several sharp turns as seen in Fig. 1 and Table 1c which is targeted in this proposed research work to achieve time efficient navigation of mobile robot. A high number of nodes are required to generate the path in B-RRT path planning techniques, which results in a high number of sharp turns. This limitation is converted into a valuable tool with a modified Bezier curve in the proposed research work.
4 Proposed S-BRRT technique
The traditional B-RRT has a significant drawback of generating many sharp turns, causing time delays in navigation. This stated limitation of generating high numbers of sharp turns is reassigned as a valuable tool in the proposed S-BRRT technique for making the trajectory smoother with zero number of sharp turns, resulting in time-efficient navigation of mobile robots in the environment. The proposed S-BRRT is also associated with the modified version of the Bezier curve technique that makes the trajectory smoother by considering the sharp turns as controlling points. The traditional Bezier curve uses the coordinate of each sharp turn as the control point \({CP}_{x,y}\) for the generation of smoother trajectories as shown in Figs. 2 and 3. These control point \({CP}_{x,y}\) make the trajectory smoother by adjusting the curvature of the trajectory. However, this traditional technique provides good results in low complexity environments as shown in Figs. 2a and 3a but, as the complexity of the environment is increased, the trajectory passes through the obstacle that results in the collision of a mobile robot as shown in Fig. 2d, f, h. This identical strategy is implemented in various simulated experimental setups with variable complexity of the environment and a very high number of collisions are experienced while implementing B-RRT with the traditional Bezier curve as shown in Table 2. The proposed S-BRRT technique is the improved version of the traditional Bezier curve with a new concept of the adaptive control points that are linked with the number of sharp turns and the Control Point \({CP}_{x,y}\) is added in the trajectory at the Threshold Distance \({TD}_{x,y}\) and in between the control point \({TCP}_{x,y}\) generated by Traditional B-RRT. The control point \({TCP}_{x,y}\) is selected w.r.t grid size, mobile robot dimension, grid cell size, distance between two control points generated by the traditional B-RRT path planning technique, etc. Both the controlling points \({CP}_{x,y}\) and \({TCP}_{x,y}\) are added to increase the number of traditional control points which resulted in smooth trajectory planning with the Bezier curve technique as shown in Figs. 2 and 3. The traditional B-RRT is linked with the newly developed Bezier curve technique that uses the combined effect of \({CP}_{x,y}\) and \({TCP}_{x,y}\) which is tested in various environmental setup, and it is experimentally obtained that the proposed S-BRRT provide an ideal solution in term of generating smoother trajectory planning in various complex environments as shown in Fig. 3.

Smooth trajectory planning with B-RRT + Traditional Bezier curve

Performance analysis of the proposed S-BRRT techniques in the simulated environment
4.1 Methodology
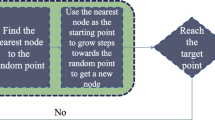
The proposed S-BRRT technique is the improved version of the traditional B-RRT with Bezier curve which relies on two segments of controlling points that are \({CP}_{x,y}\) and \({TCP}_{x,y}\) as shown in Fig. 4. The \({CP}_{x,y}\) are the control points generated by the traditional methods of taking the sharp turns as controlling point and \({TCP}_{x,y}\) are the controlling points generated by proposed S-BRRT technique that is selected based on Threshold Distance \({TD}_{x,y}\). The \({TD}_{x,y}\) is used for generating the new control points known as Adaptive control points \({TCP}_{x,y}\) that assisted in adjusting the curvature of the trajectory and close to the preplanned trajectory. The methodology of the proposed S-BRRT is demonstrated in the Fig. 5. As per the literature, a Bezier technique has been already linked with the path planning techniques for the generation of smoother trajectories. The traditional Bezier curve technique used the controlling points for the generation of the smoother trajectories and these controlling points are the points where the sharp turns occur as shown in Fig. 4. A set of control points are represented by \({\left\{{P}_{i}\right\}}_{i=0}^{N}\); where \(\left({P}_{i}\right)= \left({x}_{i};{y}_{i}\right)\). The path smoothing Bezier curve technique of degree N is:

Generation of control point w.r.t the sharp turns


Methodology of the selection of controlling point and proposed S-BRRT technique
In the Bezier curve equation, Bernstein polynomial of degree (N) is defined by the following Eq. 2 as shown below:
The results obtained by linking the path planning techniques with traditional Bezier techniques provide a stable result, but if the complexity of the environment is increased, this leads to collisions because the trajectory generated by the traditional Bezier curve converges very sharply as shown in Fig. 6. This is because the number of controlling points is less, which results in sharp convergences of the trajectory and to reduce this limitation another method was also proposed in the literature that is based on considering the midpoint between two controlling point as one more controlling point. This resulted in increasing the number of controlling point and hence generate a smoother trajectory that is followed by the mobile robot to reach the destination. However, this technique also fails if the trajectory generated by the path planning contains large number of sharp turns and to reduce this limitation, S-BRRT technique is proposed that increase the number of control points while considering the threshold distance between two proceeding control points. The increase in the controlling depends upon the distance between the two-controlling point, if the distance between the two controlling points is large, the algorithm will put extra controlling points (Adaptive control point \({TCP}_{x,y}\)) for the generation of the smoother trajectory. The methodology for the detection of sharp turns is also explained in the Fig. 5 along with the following cases as discussed below:

Performance analysis of the path planning techniques with conventional Bezier techniques, modified Bezier curve and with proposed S-BRRT techniques
CASE 1: The slope between A1 \({(x}_{1}; {y}_{1})=(1;1)\) and A2 \({(x}_{2}; {y}_{2})=(2;2)\) is \({{\theta }_{1}=45}^{0}\) as per the conventional formula of \({\text{tan}}\;{\uptheta }_{{1}} = {\text{y}}_{{2}} - {\text{y}}_{{1}} / {\text{x}}_{{2}} - {\text{y}}_{{1}}\). The next adjacent coordinate w.r.t the trajectory is A3 \({(x}_{3}; {y}_{3})=(3;3)\) which is linked with the previous coordinate that is A2 \({(x}_{2}; {y}_{2})=(2;2)\) and again the slope is calculated as \({{\theta }_{2}=45}^{0}\). Now to find the discontinuity in the trajectory corresponding to the point A1, A2 and A3 the angle \({\theta }_{1}\) and \({\theta }_{2}\) are subtracted; if the resultant is zero than no discontinuity occurs however, if resultant is not equal to zero then there is a discontinuity which is considered as sharp turn as described in case (2) as discussed below.
CASE 2: The next adjacent coordinate as per the trajectory is A5 \({(x}_{5}; {y}_{5})=(5;4)\) which is linked with the previous coordinate that is A4 \({(x}_{4}; {y}_{4})=(4;4)\) and again the slope is calculated that comes out to be \({{\theta }_{2}=0}^{0}\). Now to find the discontinuity in the trajectory corresponding to the point A3, A4 and A5 the angle \({\theta }_{3}\) and \({\theta }_{4}\) are subtracted; the resultant is not zero as the \({\theta }_{3}=45\) and \({\theta }_{4}=0\) therefore; the discontinuity occurs in the trajectory. At this condition, the coordinates of point A4 is considered as the position coordinate of the sharp turns, and it is given to the Bezier curve as a controlling point to smoothen the path.
The given statement is justified by considering an experiment in which a path is generated with the implementation of path planning techniques, as shown in Fig. 6a and the conventional Bezier technique is implemented on the path generated by the path planning technique. As the controlling point is (5) corresponding to the sharp turns and this resulted in sharp convergence of the trajectory which resulted in the collision with the obstacle as shown in Fig. 6b. In continuation, the modified Bezier curve technique with the concept of the midpoint controlling point is also implemented on the same trajectory and it is examined that the sharpness in the convergence of the trajectory is reduced to a good extent. However, the trajectory still passes through the occupied region, and this results in the collision as shown in Fig. 6c. The proposed S-BRRT technique is now implemented in the same simulated experiment and the resulted trajectory is shown in Fig. 6d. It is experimentally verified that the trajectory generated by the proposed S-BRRT becomes smoother with low convergence, resulting in a collision-free trajectory. The smoothness and low convergence in the shape of trajectory are because of the high number of controlling points that are generated w.r.t the threshold distance value. The threshold distance value relies on the grid size, grid cell size, size of the robot, inflation layer of the obstacle, distance between two adjacent controlling points, etc. The proposed S-RRT technique is also tested in various trials and the results are shown in Table 3. It is experimentally examined that the higher number of controlling points assist the Bezier curve technique to follow the predefined trajectory generated by the path planning technique and the sharp convergence of the trajectory is minimized for the collision-free task and the same is shown in Fig. 4 and Table 3. The proposed S-BRRT technique is also compared with the various renowned techniques for checking the reliability of the proposed work as discussed in the next section.
5 Result analysis
The proposed S-BRRT is tested in various simulated experiments in MATLAB and the obtained results are compared with various renowned conventional approaches based on Genetic Algorithms (GA) such as Improved GA, Enhanced GA with variable length chromosomes, and improved RRT path planning technique. The conventional Bezier curve techniques are also implemented on the trajectory generated with the conventional approaches for generating a smoother trajectory. At the initial stage, an environment is constructed in MATLAB, and the proposed S-BRRT is implemented in the environment for the generation of the smooth trajectory as shown in Fig. 7. It is experimentally examined that the trajectory generated with the implementation of the proposed S-BRRT is smoother and collision-free as shown in Fig. 7. To validate the reliability of the proposed techniques both qualitative and quantitative result analyses are performed by considering various environments and then implementing various conventional approaches for the generation of trajectories.

Smooth trajectory planning with the proposed S-BRRT
5.1 Qualitative analysis
The qualitative analysis is performed to check the reliability of the proposed S-BRRT technique by comparing the results obtained by the proposed S-BRRT and the results obtained with other conventional approaches. For the qualitative analysis, an identical environment is generated in the MATLAB and the results are obtained by implementing the proposed S-BRRT, Improved Genetic Algorithm, and Improved RRT path planning technique and Genetic algorithm with variable length chromosomes [8] is examined and shown in Fig. 8. The trajectory generated with conventional approaches (Improved Genetic Algorithm and Genetic algorithm with variable length chromosomes and improved RRT path planning technique) are also modified by implementing the traditional Bezier curve for the generation of smooth trajectory as shown in Fig. 8. It is experimentally obtained that with the implementation of the conventional approaches without any path smoothing techniques the number of collisions is zero, but the path length is high with the large number of sharp turns which degraded the performance of the conventional approaches. To decrease the number of sharp turns, the conventional Bezier curve is also linked with the trajectory generated by the conventional path planning technique which resulted in smooth trajectory generation. However, the number of collisions is increased whereas, with the implementation of the proposed S-BRRT technique, the trajectory becomes smoother with no collision as shown in Fig. 8.


Comparative analysis of the proposed S-BRRT techniques with conventional approaches [8]
5.2 Quantitative analysis
The quantitative analysis of the results obtained by implementing the proposed S-BRRT approach and the conventional approaches are done by considering the identical experimental setup as explained in Sect. 5.1 while considering various parameters such as path length, number of sharp turns, time taken by the mobile robot to reach destination and number of collisions as shown in Tables 4 and 5. To do the quantitative analysis of the results, 30 trials have been done by taking different environmental setups and diverse positions of start and goal coordinates. It is experimentally obtained that with the implementation of the proposed S-BRRT technique, the path length turns are reduced by 15.03%, the number of sharp turns is reduced by 100% and the time lag is reduced by 27.01% as shown in Table 4. In addition to this, a further comparison is also done based on a repeated number of experiments, and it is experimentally verified that a 100% reduction of collision is observed with the implementation of the proposed technique with a 6.58% reduction in time lag as shown in Table 5.
6 Real-time implementation of the proposed S-BRRT technique
The proposed S-BRRT technique is also tested in real-time experiments because the constraints in the physical environment are dynamic in nature, but the simulator constraints are mostly static in nature. In the experimental setup, different environments are constructed using cardboard boxes and with the help of LiDAR range sensors, maps of the environment are generated which is further converted into an occupancy grid map in MATLAB, and the communication between the software and hardware is done using Arduino Uno and USB port as shown in Fig. 9. The starting and the goal position coordinates are given manually and with the implementation of the path planning algorithm, the trajectory is generated from start to goal position coordinates. The path is generated by the proposed S-BRRT technique and three conventional approaches (Global path planning with an improved genetic algorithm, Genetic algorithm with avoiding premature convergence, and path planning with improved RRT technique along with path smoothing [8, 9], and the results are shown in Fig. 10. The path generated by conventional approaches (Global path planning with an improved genetic algorithm, Genetic algorithm with avoiding premature convergence, and path planning with improved RRT path planning technique) is also modified by implementing traditional Bezier curve techniques and modified Bezier curve technique based on considering the sharp turns as the controlling point for the path smoothing as shown in Fig. 10. It is experimentally obtained that with the implementation of the proposed S-BRRT techniques the number of collisions is reduced by 100% while the time lag is reduced to 11.41% as compared to the conventional approaches as shown in Tables 6 and 7. It is examined that the proposed S-BRRT technique can also be linked with the other path planning techniques, and it provides improved results as shown in Tables 7, 8, 9, 10, and 11 along with Fig. 10. The proposed S-BRRT technique is linked with the Improved GA, Enhanced GA with variable chromosomes, and improved RRT techniques and it is experimentally verified that the linking of the S-BRRT technique with these stated techniques generates smoother and collision-free trajectories as shown in Tables 7, 8, 9, 10 and 11 along with Fig. 10.

Software and hardware specifications





Result analysis based on the real time experiments
6.1 Velocity and time analysis
A mobile robot is allowed to navigate in various trials by following the trajectories generated by the path planning techniques. A sharp turn/ curve in the trajectory resulted in the time lag during the navigation of the mobile robot in reaching the destination which is also been observed in various trials. This is explained by a simple approach in which the mobile robot is allowed to follow the trajectory generated by the path planning technique having a path length of 200 cm with no sharp turn (straight line) and the velocity (time is manually recorded) is calculated for different cases as showing in Table 12 and Fig. 11. It is experimentally obtained that the velocity of 25 cm/s is attained but, if the trajectory contains the sharp turns, in this condition the mobile robot must vary its acceleration to follow the trajectory which resulted in time lag and this statement is also justified by considering various test and trials as shown in Table 12. In these trials, the path length is considered as same, but the number of sharp turns is varied which resulted in reducing the velocity to 17.26 cm/s as shown in Table 12. In the next scenario, the proposed S-BRRT technique is implemented on the identical experimental setup, and the time/velocity profile is compared with the conventional techniques, and it is experimentally obtained that the velocity value is improved to 21.60 cm/s and this also reduces the time lag as shown in Table 13, Figs. 12 and 13.

Schematic of the trajectory (with and without sharp turns)

Comparative analysis of velocity profile in simulated environment

Comparative analysis of time profile in simulated environment
6.2 Error analysis
The proposed S-BRRT technique is implemented in various trials and the variation in the velocity and time is also compared as shown in Fig. 14. The error analysis is based on the comparative analysis of velocities and time variation that is V1 and T1 (velocity attained and time taken when no sharp turns), V2 and T2 (velocity attained and time taken with sharp turns but same distance between start and goal position) and V3 and T3 (velocity attained and time taken when proposed S-BRRT is implemented) as shown in Fig. 14. It is experimentally verified that with the implementation of proposed S-BRRT techniques, the error in time lag is reduced to 66.23%, and velocity error is reduced to 57.52% as shown in Fig. 14.

Error analysis in velocity and time constraints in simulated environment
6.3 Velocity and time analysis in real-world experiment
The reliability of the proposed S-BRRT techniques is also tested in real-world experiments. Various conventional approaches are linked with the S-BRRT technique to check the improvement by implementing the proposed technique for achieving time-efficient navigation. At the initial stage, the conventional approaches (Improved Genetic, Genetic algorithm with avoiding premature convergence and improved RRT) are implemented in four different trials and various parameters such as path length, time, and velocity analysis (orange color bars) are done as shown in Figs. 15, 16 and 17. Afterward, the proposed S-BRRT is linked with the conventional approaches and again tested in identical trials by averaging the parameters such as path length, velocity, and time analysis is done as shown in Figs. 15, 16, and 17. Afterward, the proposed S-BRRT technique is linked with the conventional approaches, and significant improvements in path length, velocity, and time are obtained as shown in Figs. 15, 16, and 17. In addition to this result analysis, performance analysis on the basis of the percentage improvement in the velocity is also done as shown in Fig. 18. An absolute error in the velocity parameter is considered while comparing the velocity values obtained with the conventional approaches and the conventional approaches linked with the proposed S-BRRT technique which shows a significant improvement in the velocity as shown in Fig. 18. While comparing the velocity parameters of the conventional and conventional approaches linked with the proposed S-BRRT technique, an improvement of 23.67% is obtained that resulted in time-efficient navigation of the mobile robot in the complex environment because the sharp turns are reduced, and the path trajectory becomes smoother while implementing the proposed S-BRRT technique.

Performance analysis w.r.t path length in real time experiments

Trial testing setup with time analysis

Velocity analysis in real time experiments

Improvement in velocity wr.t conventional approached and conventional approached linked with S-BRRT technique
7 Conclusion
This research paper presents an efficient solution (S-BRRT technique) for solving the problem of smooth trajectory planning to reduce the time lag in the navigation of the mobile robot. The proposed S-BRRT technique is linked with the Bezier curve for the generation of smooth trajectories by increasing the number of control points. The proposed S-BRRT technique is tested in various simulated and real word experimental setups and the following results are obtained:
-
It is experimentally obtained that with the implementation of the conventional approaches the number of collisions is high, and the trajectory generated with conventional approaches passes through the obstacles as shown in Fig. 6 whereas, with the implementation of the proposed S-BRRT technique, the trajectory becomes smoother with no collisions are experienced.
-
With the implementation of the proposed S-BRRT technique, the path length turns are reduced by 15.03%, the number of sharp turns is reduced by 100% and time lag is reduced by 27.01% as shown in Table 4.
-
It is experimentally obtained that with the implementation of the proposed S-BRRT technique, the number of collisions is reduced to 100% while the time lag is reduced to 11.41% as compared to the conventional approaches as shown in Tables 6 and 7.
-
The proposed S-BRRT technique is also linked with the renowned conventional approaches to enhance their performance in terms of generating smoother and collision-free trajectories as shown in Fig. 10 and Tables 8, 9, 10, 11.
-
With the implementation of the proposed S-BRRT technique, the velocity and time profile are also improved as shown in Tables 12, 13 and in Fig. 12, 13, 14.
-
With the implementation of proposed S-BRRT techniques, the error in time lag is reduced to 66.23% and velocity error is reduced to 57.52% and the average velocity is increased by 23.67% as shown in Figs. 14, 15, 16, 17, 18.
The proposed technique is trialed and tested for a static environment and in the future, the proposed S-BRRT technique will be implemented for the generation of smoother trajectories while considering the dynamic 3D environment [14, 15].
References
Singh R, Nagla KS (2019) A modified sensor fusion framework for quantifying and removing the effect of harsh environmental condition for reliable mobile robot mapping. Sens Rev 39:456–472. https://doi.org/10.1108/SR-10-2018-0272
Singh R, Nagla KS (2020) Comparative analysis of range sensors for the robust autonomous navigation—a review. Sens Rev 40:17–41. https://doi.org/10.1108/SR-01-2019-0029
Jan GE, Chang KY, Parberry I (2008) Optimal path planning for mobile robot navigation. IEEE/ASME Trans Mechatron 13:451–460
Ko MH, Ryuh B-S, Kim KC et al (2014) Autonomous greenhouse mobile robot driving strategies from system integration perspective: review and application. IEEE/ASME Trans Mechatron 20:1705–1716
Mac TT, Copot C, Tran DT, de Keyser R (2016) Heuristic approaches in robot path planning: a survey. Robot Auton Syst 86:13–28. https://doi.org/10.1016/j.robot.2016.08.001
Zhang H, Lin W, Chen A (2018) Path planning for the mobile robot: a review. Symmetry (Basel) 10:450
Véras LGDO, Medeiros FLL, Guimaráes LNF (2019) Systematic literature review of sampling process in rapidly-exploring random trees. IEEE Access 7:50933–50953
Lamini C, Benhlima S, Elbekri A (2018) Genetic algorithm based approach for autonomous mobile robot path planning. Procedia Comput Sci 127:180–189
Wei K, Ren B (2018) A method on dynamic path planning for robotic manipulator autonomous obstacle avoidance based on an improved RRT algorithm. Sensors 18:571
Ma J, Liu Y, Zang S, Wang L (2020) Robot path planning based on genetic algorithm fused with continuous Bezier optimization. Comput Intell Neurosci 2020:1–10
Liu S, Sun D (2013) Minimizing energy consumption of wheeled mobile robots via optimal motion planning. IEEE/ASME Trans Mechatron 19:401–411
Krishnan J, Rajeev UP, Jayabalan J, Sheela DS (2017) Optimal motion planning based on path length minimisation. Robot Auton Syst 94:245–263
Urcola P, Lázaro MT, Castellanos JA, Montano L (2017) Cooperative minimum expected length planning for robot formations in stochastic maps. Robot Auton Syst 87:38–50
Zhao J, Cheng D, Hao C (2016) An improved ant colony algorithm for solving the path planning problem of the omnidirectional mobile vehicle. Math Probl Eng 2016:1–10
Sergiyenko OY, Tyrsa VV (2020) 3D optical machine vision sensors with intelligent data management for robotic swarm navigation improvement. IEEE Sens J 21:11262–11274
Liu H, Luo S, Lu J (2019) Method for adaptive robust four-wheel localization and application in automatic parking systems. IEEE Sens J 19:10644–10653
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Singh, R. Optimized trajectory planning for the time efficient navigation of mobile robot in constrained environment. Int. J. Mach. Learn. & Cyber. 14, 1079–1103 (2023). https://doi.org/10.1007/s13042-022-01684-7
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s13042-022-01684-7