
Abstract
The need for low-power and low-cost connected devices supporting several communication standards continues to increase with the rising demand in Internet of Things (IoT) applications. This paper presents a reconfigurable inductorless radiofrequency (RF) voltage-controlled oscillator (VCO) capable to work across various frequency bands with a low area. This VCO has an inductor-capacitor (LC) topology though using an active inductor based on a gyrator-C structure. It uses n-bits controlled CMOS inverters for coarse frequency tuning and diode varactor for fine frequency tuning. Implemented in 130-nm CMOS technology, the VCO can cover a frequency tuning of 1.22–2.6 GHz. It achieves a phase noise of – 87 dBc/Hz at 1 MHz with a power consumption of 4 mW from 1.1-V supply. The active die area is only 54 × 59 μm2.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
The Internet of Things (IoT) has been hailed as the next frontier of innovation in which everyday objects in our environment (homes, offices, cars, factories, cities) connect to the Internet in ways that improve our lives. The IoT market is poised to exceed 75 billion devices by 2025, but several challenges remain in adding more connectivity to electronic devices, including cost, energy efficiency, security, and interoperability [1]. The main idea behind the IoT concept is the ability of data storage and exchange between different devices, connecting a large number of smart objects.
Many communication standards have been developed to deal with the demands of IoT applications. Some of which are Bluetooth Low Energy (BLE), ZigBee, LoRaWAN, and Wi-Fi HaLow (IEEE 802.11ah) [2, 3]. To provide multistandard operation, the most used solution was to combine several fixed narrowband radiofrequency (RF) receivers in radio systems with multiple chips [4]. But this strategy is expensive, not flexible and power hungry. As a solution, it is necessary to design reconfigurable multistandard with low-power and single-chip radio frontend.
Figure 1 presents the topology of a typical IoT node. It is composed of a microcontroller (MCU) that processes the sensed data and runs software stacks interfaced to a wireless device for RF connectivity. Since IoT devices must support several communication standards, each IoT node comprises multistandard radio module. Its design should be optimized to be energy efficient as it is battery-powered.

Topology of a conventional IoT node
Therefore, the challenge is to design low-cost, low-power, and multistandard transceivers. This trend will continue in the future by the constant rise of connected device requirements. The voltage-controlled oscillator (VCO) is a key building block in all radio transceivers. It generates signals that can be used for frequency synthesis and clock generation, for example.
The development of the VCO building block that is still challenging must support wideband operation, be reconfigurable, and have suitable phase noise to address simultaneous multistandard communications. Besides, inductorless topologies are required since they lower the circuit area and then the chip cost.
Conventionally, ring-based VCO is characterized by a wide tuning range and low area occupation. Inductor-capacitor (LC)-VCO has better phase noise but occupies larger chip area and its frequency tuning range is compromised. Several techniques to extend frequency tuning range in LC-VCOs have been presented such as varying the capacitance or the inductor [5]. In the case of capacitors, the changing ratio of varactors is determined by the maximum to minimum capacitance ratio. For typical varactor capacitance ratios, the tuning range of an LC-VCO is limited to 30%. Hence, active inductors can be used to overcome this restricted tuning range. They also lead to reduce the silicon area and therefore the cost of the chip.
In this work, a novel topology of a multi-band inductorless LC-VCO is proposed. It uses two frequency tuning approaches: an active inductor based on digitally controlled CMOS inverters that concede coarse tuning and a diode varactor for fine tuning.
This paper is organized as follows. Section 2 presents the circuit design considerations. It describes the proposed inductorless VCO topology and investigates the used active inductor. Section 3 shows the circuit implementation and discusses the obtained results. Section 4 draws conclusions.
2 Active Inductor Design Considerations
Designing LC-VCOs requires a great attention when considering the LC-tank since it determines the whole VCO performance. In this work, varactor diode has been used since it presents a good compromise between quality factor, effective parallel equivalent conductance, and frequency tuning range. Moreover, its capacitance value varies linearly with control voltage (Vctrl) comparing with MOS varactors. Concerning the inductor, it is the most vital component in LC-tanks, since its quality factor affects the phase noise and its resistive loss determines the power consumption.
Recent requirements of IoT applications boost the need to design low-power, low-cost, and multi-band oscillators. In order to optimize the circuit design and to respect the various constraints, it is necessary to develop generic and inductorless VCO with digitally tunable performance. In this work, a tunable active inductor will be used to design the inductorless VCO.
2.1 Active Inductor Topology
The proposed active inductor is based on a gyrator-C topology. A gyrator is a well-known circuit that presents at its input a scaled version of the inverse of the impedance connected to its output [6], as shown in Fig. 2(a). In the particular case of using a capacitive load, an inductive behavior will be present at the input, as shown in Fig. 2(b).

(a) Ideal gyrator and (b) gyrator-C basic concepts
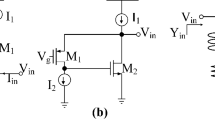
Figure 3(a) depicts the proposed single-ended active inductor topology based on the gyrator-C principle given in Fig. 2(b). The transconductance gm1 is realized using a differential pair (M1, M2) while gm2 is variable and composed by n CMOS-controlled inverters (Inv1 to Invn). Each inverter is associated with switching transistors (PMOS and NMOS) in order to ensure the control of the inverter via the control voltage Vctrl (cf. Fig. 3(b)). To obtain the transconductance of each inverter, both PMOS and NMOS switches should be closed. While setting n CMOS-controlled inverters in parallel, the value of the equivalent transconductance gm2 can be adjusted by modifying Vctrl. There are 2n-1 possible combinations (Vctrl = [0000] is not used). This structure has advantages of high linearity along with simple tuning and integration.

(a) Proposed active inductor topology. (b) CMOS-controlled inverter structure
The equivalent impedance of the proposed tunable active inductor can be written as:
where CA is given by the capacitance at node A and Cvar.
Therefore, the inductance value can be modified electronically either by varying the transconductances or the capacitance values. In this work, we propose to adjust both gm2 and Cvar for coarse and fine tuning respectively. In fact, gm2 is adjusted depending on the applied digital control word, while Cvar is varied using a varactor depending on the voltage VCvar as shown in Fig. 3.
Design considerations have been taken into account in order to optimize the circuit performances. In fact, it is known that a good varactor is characterized by a high-quality factor and a maximal ratio Cmax/Cmin leading to large tuning range.
Besides, the series resistance of varactor has an imperious effect on the overall quality factor. In this regard, the diode varactor gives a better compromise between tuning range and Q than the MOS varactor. Afterwards, the focus goes to the active components. An optimal sizing of MOS transistors contributes to a noise reduction. In fact, the transistor noise is directly related to the gate resistance Rg, and then it should be decreased. Since sizing the MOS with a maximal number of fingers causes a reduction of Rg, multi-finger transistors have been used in this work to decrease the noise.
A monitoring interface has been developed in order to generate the digital word of the different control voltages and to automate the choice of gm2 and therefore the desired inductance value. Besides, a comparative study to determine the optimal number of inverters has been investigated. It exhibits that a gm2 with four-stage inverters gives a good compromise between power consumption and frequency tuning range.
2.2 Active Inductor Characterization
An active inductor with four-stage inverters has been implemented in a 130-nm CMOS technology. In this case (n = 4), there are 15 possible Vctrl combinations. Figure 4 shows the variation of the inductance versus frequency as Vctrl is varied. It shows that the inductance can be tuned for the frequency of interest until 2.6 GHz while changing the digital control word Vctrl.

Active inductor value variation versus frequency for different Vctrl combinations
It is mandatory to maintain an inductive behavior of the active inductor and to keep the self-resonant frequency (SRF) higher than the operating frequency for each Vctrl combination. The maximal values of SRF versus Vctrl are given in Fig. 5(a). It shows that SRF increases from 1.64 to 3.16 GHz when changing Vctrl.

Variation of (a) SRF and (b) gm2 for the different Vctrl combinations
Figure 5(b) presents the variation of gm2, the equivalent transconductance of the inverters block, versus Vctrl. It can be noticed that there is a dependence between SRF and gm2 and that increasing gm2 causes the rise of SRF. In this structure, the transconductance gm2 reaches high values and varies linearly between 3.24 and 22.7 mS at various Vctrl that results in a linear variation of the inductance too.
Considering the example of an operating frequency of 1 GHz, the inductance variation versus Vctrl is depicted in Fig. 6(a). It shows that LAI decreases from 9 to 70 nH. That confirms that gm2 and LAI are inversely proportional. The variation of the power consumption of the active inductor versus Vctrl is also given in Fig. 6(b). It shows that the power varies linearly from 2.96 to 3.73 mW from 1.1-V supply.

Variation of (a) the inductance and (b) power consumption for the different Vctrl combinations
The quality factor (Q) could be defined as the ratio of the imaginary part to the real part of the input impedance. Decreasing the series resistance of the inductor can increase Q at the expense of the noise performance. Figure 7(a) shows the quality factor variation versus frequency for different control voltages. For example, at 2.4 GHz, Q factor equals 26 for Vctrl = [1110], while it is maximal and equal to 63 for Vctrl = [1011]. In this case, the inductance value is 25 nH and is associated to a series resistance of 6 Ω. Figure 7(b) illustrates the Q factor and the equivalent inductance versus frequency for this latter case.

(a) Quality factor variation for the different Vctrl combinations. (b) Equivalent LAI and Q versus frequency for a fixed Vctrl [1011]
Furthermore, with regard to the varactor Cvar tuning (cf. Fig. 3(a)), it allows not only the adjustment of the inductance value, but also a further tuning of the quality factor. Figure 8 depicts LAI and Q variations versus frequency depending on the varactor value, for example, Vctrl = [1011]. It demonstrates that adjusting the varactor has a direct impact on Q and LAI variation. Hence, the controllability and flexibility aspects are well fulfilled with the proposed circuit.

(a) Equivalent inductance and (b) quality factor responses when tuning the varactor Cvar
3 Inductorless VCO Design
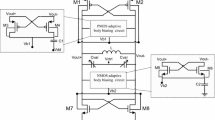
Figure 9 shows the proposed inductorless LC-VCO topology. It is based on the presented active inductor. Several inductorless LC-VCOs given in the literature use switched capacitor banks as a capacitor of the tank [7, 8]. However, in this work, the intrinsic parasitic capacitances of MOS transistors will be used to emulate the capacitance Ctank in lieu of using additional capacitors. That allows minimizing the circuit size.

Proposed inductorless VCO implementation
This VCO structure uses seven CMOS inverters:
-
Four controlled inverters (Inv1 to Inv4) that emulate the transconductance gm2 of the active inductor.
-
An inverter InvC for inductor biasing.
-
An inverter InvA that generates the negative resistance for LC-tank loss compensation.
-
An inverter InvB that generates the positive resistance for oscillation maintain.
CMOS inverters have been used to keep the VCO simplicity while improving power consumption, area, and linearity performances.
The positive and negative resistances can be expressed as:
where gm_InvA, gm_InvB, and gm_diff are the transconductances of inverters InvA, InvB, and of the differential pair respectively.
The quality factor of the oscillator at the resonant frequency can be expressed as:
where R = RP// RN.
According to (5), it can be noted that rising the resistance R results on an increase of the quality factor.
To maintain oscillation, the quality factor should be higher than √2/2 and the positive resistance should be higher than the negative resistance (RP > |RN|). The VCO oscillation frequency is given by:
Therefore, the VCO frequency could be tuned by adjusting the active inductor value (varying gm2 due to the digital control word of the inverters and the control voltage of the varactor Cvar).
In addition, it can be noted that in the proposed VCO structure, it is possible to ensure a wider frequency tuning range by simply increasing the inverters number n. The power performance will not be greatly degraded in this case if a good compromise between dimensions of CMOS inverters and the overall power consumption is ensured at the desired frequency range.
4 VCO Implementation and Results
The proposed 2.4-GHz inductorless VCO has been implemented in a 130-nm CMOS technology. Its layout and micrograph are shown in Fig. 10. It occupies an area of only 0.0031 μm2 excluding pads and 0.212 μm2 with pads. Post-layout simulations have been achieved using Spectre-RF simulator of Cadence® taking into account the non-idealities and the parasitic effects.

Chip photograph of the inductorless VCO
All transistors have been sized with the minimum channel length to reduce the power. Decoupling capacitors have been added before I/O pads used to apply DC voltages. A high-input impedance active probe has been adopted to measure the VCO output characteristic. This facilitates the experimental process and avoids using additional buffers for impedance matching with measuring devices.
It is essential to verify the VCO stability. Thus, it must be studied under various PVT (process, voltage, temperature) conditions. The obtained results, for different control voltages, are summarized in Table 1. It can be seen that the oscillation is maintained even in the worst case. For example, in the case of Vctrl = [0010], it can be seen that the variations of frequency, phase noise, and power consumption are almost 16%, 3%, and 6% respectively compared with the typical condition.
Since both process tolerances and component mismatch truncate Gaussian probability distribution functions, it is necessary to investigate statistical simulations. In our application, Monte Carlo simulations can be applied to verify the probability distribution of the oscillation frequency with certain process tolerances and a resultant component mismatch. Monte Carlo simulations have been performed with Spectre-RF simulator of Cadence. The variation analysis concerns process and mismatch variations of the components corners, in 130-nm CMOS technology, on the oscillator frequency band.
Monte Carlo simulations of the proposed tunable VCO are given for 100 iterations. Results of three different Vctrl values (the same values used in Table 1) are depicted in Fig. 11. They are expressed as frequency of occurrence histogram for different intervals of the oscillation frequency fvco. Histograms are fitted with Gaussian function to extract probabilities statistics.

Monte Carlo simulations: VCO frequency histogram for (a) Vctrl = [0010] (fvco = 1.2 GHz), (b) Vctrl = [0111] (fvco = 2 GHz), and (c) Vctrl = [1110] (fvco = 2.3 GHz)
It can be seen, in the case of Vctrl = [0010], that 95% of the occurrences have the oscillation frequency in the required range with a mean value equal to 2 GHz and a σ of 0.014 (cf. Fig. 11(b)).
In the case of Vctrl = [0010] and [0111], there are 90% of samples in the desired band with a mean value equal to 1.119 GHz and 2.37 GHz, respectively. These simulations depict also a maximum degradation of fvco by roughly 100 MHz for minimal and maximal frequencies in the VCO’s tuning band.
The results demonstrate that the performance parameter sweep is stable within a suitable range.
Moreover, the implemented reconfigurable VCO achieves a wide frequency tuning range from 1.22 to 2.6 GHz when changing the control voltages, as shown in Fig. 12. It can be seen that the input digital word Vctrl allows a coarse frequency tuning of 72% while the varactor voltage VCvar concedes fine tuning of almost 150 MHz. It means that as Vctrl increases, different frequency bands are covered and, as VCvar sweeps, each standard bandwidth is provided. Note that the frequency tuning range can be increased by using MOS varactors instead of diode varactors and by simply rising the number of inverters in the proposed active inductor.

VCO frequency versus Vctrl and varactor variations
Figure 13 depicts the obtained phase noise and power consumption of the VCO when tuning the active inductor for the different frequency bands. The phase noise varies between − 82 and – 87 dBc/Hz at 1 MHz offset from the carrier frequency, which is relatively good for low data rate standards, but still perfectible. This is due to the large number of transistors used in this circuit. The obtained mean DC power is around 4 mW from 1.1-V supply for the different control voltages combinations.

Phase noise and power consumption of the VCO versus frequency
The VCO performances are summarized in Table 2 and is compared with similar previously published works. We have used the figure of merit (FOM), derived from the ITRS reports [9], and defined as
where L{Δf} represents the phase noise at the offset frequency (foffset) from the oscillation frequency fosc and PDC is the DC power consumption in mW.
It can be noted that interesting performances have been achieved in terms of low power consumption and small area occupation. That makes our circuit suitable for low-cost and low-power IoT applications. A wide frequency tuning range is also obtained while achieving a comparable phase noise with other works. In addition, the peak-to-peak magnitude of the output signal and the setup time of the VCO are almost constant around 400 mV and 20 ns respectively for the different control voltages.
5 Conclusion
Design and implementation of an inductorless reconfigurable VCO are presented. The proposed topology, suited for highly integrated multistandard radio receivers, achieves wide frequency tuning range of 72% from 1.22 to 2.6 GHz. The VCO uses CMOS digitally controlled inverters in the active inductor and a varactor for coarse and fine frequency tuning respectively. It displays low-power consumption with an active die area of only 0.0031 μm2. That makes the proposed design suitable for IoT applications and wireless multistandard systems.
References
McKinsey Global Institute. (2015). The Internet of things: mapping the value beyond the hype.
Gazis, V. (2017). A survey of standards for machine-to-machine and the internet of things. IEEE Communications Surveys Tutorials., 19, 482–511.
Adame, T., Bel, A., Bellalta, B., Barcelo, J., & Oliver, M. (2014). IEEE802.11ah: the wifi approach for M2M communications. IEEE Wireless Communications., 21, 144–152.
Chipworks. (2016) Iphone SE teardown. http://www.chipworks.com/ko/node/359.
Kim, J. J. (2011). Ultra wideband CMOS voltage controlled oscillator with reconfigurable tunable inductors. Eelctronics Letters., 47, 249–250.
Thanachayanont, A., & Payne, A. (1996). VHF CMOS integrated active inductor. Electronics Letters., 32, 999–1000.
Shirazi, N. C. (2013). A 5.5 GHz voltage controlled oscillator with a differential tunable active inductor and passive inductor. International. Journal of Information and Electronics Engineering, 3, 93–96.
Kao, H. L., et al. (2015). A wide tuning-range CMOS VCO with a tunable active inductor. Math. Problems in Engineering (Hindawi), 2015, 1–7.
ITRS, (2007) International technology roadmap for semiconductor.
Szczepkowski, G., Baldwin, G., Farrell, R., (2007). Wideband 0.18μm CMOS VCO using active inductor with negative resistance, European Conference on Circuit Theory and Design ECCTD, pp. 990–993.
Jeong, Y. J., Kim, Y. M., Chang, H. J., et al. (2012). Low-power CMOS VCO with a low-current, high-Q active inductor. IET Microwaves, Antennas and Propagation, 6, 788–792.
Saberkari, A., & Seifollahi, S. (2012). Wide tuning range CMOS Colpitts VCO based on tunable active inductor. Majlesi Journal of Telecommunication Devices, 1, 11–15.
Kia, H., et al. (2014). Wide tuning-range CMOS VCO based on a tunable active inductor. International Journal of Electronics, 101(1), 88–97.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Haddad, F., Ghorbel, I. & Rahajandraibe, W. Design of Reconfigurable Inductorless RF VCO in 130 nm CMOS. BioNanoSci. 9, 285–295 (2019). https://doi.org/10.1007/s12668-019-0603-2
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12668-019-0603-2