
Abstract
The aim of this paper is to solve the multiobjective optimal power flow (MOPF) problem using a new metaheuristic that is the grenade explosion method. The MOPF problem is formulated by assuming that the decision maker may have a fuzzy goal for each of the objective functions. Six objectives are considered which are: the minimization of generation fuel cost, the improvement of voltage profile, the enhancement of voltage stability, the reduction of emission and the minimization of active and reactive transmission losses. The proposed approach has been tested on the IEEE 30-bus test system. The obtained results show the effectiveness of the proposed method.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Over the past half-century, optimal power flow (OPF) has been one of the foremost research works for the power system community. It has become the heart of economically efficient and reliable independent system operator power markets [1].
The conventional power flow problem can be stated by specifying loads at PQ buses, generated powers and voltage magnitudes at PV buses in addition to a complete topological description of the network. The objective of such problem is to determine voltages and then to compute all the other quantities like currents, line flows and losses [2]. However, in the OPF problem, the generated powers have to be adjusted according to some criteria, for instance the minimum generating cost and under some constraints like power flow constraints. Therefore, the main purpose of the OPF problem is to give the optimal settings of a power system (generated powers, voltages at PV buses,...) by optimizing an objective function (minimum cost, minimum losses,...) while satisfying some equality and inequality constraints (power flow, operating limits of system components, security constraints...) [3].
Even 50 years after the problem was first formulated, researchers worldwide still have thirst for solving the OPF problem. Because it is complex economically, electrically and computationally [1]. The first methods that have been used to solve the OPF problem are deterministic or traditional ones. A detailed survey of such methods is given in [4]. It is reported in that paper that at present, the most powerful deterministic methods for OPF are: active-set sequential linear programming (SLP), sequential quadratic programming (SQP) methods and variants of primal-dual interior point methods (PDIPMs) [4]. Furthermore, some other approaches are tested. Some researchers try to reformulate the classical OPF to a semidefinite programming (SDP) model, in order to take advantage of the SDP technique as in [5]. Other researchers have proposed Branched and Bound method combining with SDP as in [6]. However, traditional methods have shown some limitations as reported in the literature [4, 7, 8].
Even tough, many works are still conducted in the fled of traditional methods, progressively metaheuristics are becoming a serious and a reliable alternative for solving the OPF problem. Some examples of metaheuristics used to solve the OPF problem are: evolutionary programming (EP) [9], genetic algorithm (GA) [10], particle swarm optimization (PSO) [11], tabu search (TS) [12], simulated annealing (SA) [13], differential evolution (DE) [14], biogeography-based optimization (BBO) [15], imperialist competitive algorithm (ICA) [16], league championship algorithm (LCA) [17], black-hole-based optimization (BHBO) [18], teaching-learning-based optimization (TLBO) [19], differential search algorithm (DSA) [20], colliding bodies optimization (CBO) [21], electromagnetism-like mechanism (EM) [22] and backtracking search optimization (BSA) [23]. A review of many metaheuristics applied to solve the OPF problem is given in [7, 8].
However, due to the varied formulations and objectives of the OPF problem, no algorithm is the best in solving all OPF problems. Therefore, there is always a need for a new algorithm which can solve some of the OPF problems efficiently. Furthermore, in recent years, the field of metaheuristics has witnessed a true tsunami of novel methods [24]. These new metaheuristics are very efficient since they are tested on hard benchmarks and compared with many other methods. Therefore, this paper aims to apply a new metaheuristic, which has not received yet much attention in the power systems community that is the grenade explosion method (GEM) in order to solve the OPF problem.
The GEM is new metaheuristic based on the mechanism of grenade explosion [25, 26]. Ahrari et al., demonstrate in [25, 26] the superiority of the GEM method compared with other popular metaheuristics.
In this paper, the OPF problem is formulated as a multiobjective optimization problem. Six objectives are investigated that are: the minimization of generation fuel cost, the improvement of voltage profile, the enhancement of voltage stability, the reduction of emission and the minimization of active and reactive transmission losses. The objective functions are replaced with membership functions using fuzzification.
The remainder of this paper is organized as follows. First, the problem formulation is presented in Sect. 2. Then, the GEM method is presented in Sect. 3. Next, the results after solving different cases of OPF (single objective and multiobjective cases) using GEM are discussed in Sect. 4. Finally, the conclusions are drawn in the last section of this paper.
2 Problem formulation
The OPF is a power flow problem which gives the optimal settings of the control variables for a given settings of load by minimizing a predefined objective function such as the cost of active power generation. The OPF considers the operating limits of the system and it can be formulated as a nonlinear constrained optimization problem as follows:
where u is the vector of independent variables or control variables, x is the vector of dependent variables or state variables, \(\text{ f }( {\text{ x },\text{ u }})\) is the objective function, \(\text{ g }( {\text{ x },\text{ u }})\) is the set of equality constraints, and \(\text{ h }( {\text{ x },\text{ u }})\) is the set of inequality constraints.
In the multiobjective optimal power flow (MOPF) problem, instead of only one objective function a vector of objective functions is optimized. Therefore, the MOPF can be formulated as follows:
where F(x, u) is the vector of objective functions and k is the number of objective functions.
2.1 Design variables
2.1.1 Control variables
These are the set of variables which can be modified to satisfy the load flow equations. The set of control variables in the OPF problem formulation are:
P\(_\mathrm{G}\): active power generation at PV buses except the slack bus.
V\(_\mathrm{G}\): voltage magnitudes at PV buses.
T: tap settings of transformers.
Q\(_\mathrm{C}\): shunt VAR compensation.
Hence, u can be expressed as:

where NG, NT and NC are the number of generators, the number of regulating transformers and the number of VAR compensators, respectively.
2.1.2 State variables
These are the set of variables which describe any unique state of the system. The set of state variables for the OPF problem formulation are:
P\(_{\mathrm{G1}}\): active power generation at slack bus.
V\(_{\mathrm{L}}\): voltage magnitudes at PQ buses or load buses.
Q\(_{\mathrm{G}}\): reactive power output of all generator units.
S\(_{l}\): transmission line loadings (or line flow).
Hence, x can be expressed as:

where NL, and nl are the number of load buses, and the number of transmission lines, respectively.
2.2 Objective functions
Many objective functions can be found in the literature for the OPF problem. In this paper, six objective functions are studied. These objectives are discussed in the following sections.
2.2.1 Objective function # 1: generation fuel cost
The generation fuel cost is usually expressed by a quadratic function as follows:
It is worth to mention here that the cost function given by (3) is convex. However, in some cases the cost function can be non-convex for instance when multi-fuels options are used as in [19, 21].
2.2.2 Objective function # 2: voltage deviation
Bus voltage is one of the most important and significant indication of safety and service quality. The voltage profile can be improved by minimizing the load bus voltage deviations (VD) from 1.0 p.u, which is given by:
2.2.3 Objective function # 3: voltage stability index
Prediction of voltage instability is an issue of paramount importance. In [27] Kessel and Glavitch have developed a voltage stability index referred to as Lmax which is defined based on local indicators L\(_\mathrm{j}\) and it is given by:
where L\(_\mathrm{j}\) is the local indicator of bus j and it is represented as follows:
where H matrix is generated by the partial inversion of \(Y_{bus}\). More details can be found in [27].
The Lmax varies between 0 and 1 and the lower this indicator is the more the system is stable. Hence, in order to enhance the voltage stability, Lmax has to be minimized.
2.2.4 Objective function # 4: emission
There is an increasing worldwide emphasizes on environmental pollution reduction and control [28]. Therefore, it is desirable to adjust the OPF to account for emission which will drastically affects the whole system operation [28, 29].
The total ton/h emission (E) of the atmospheric pollutants such as sulfur oxides SO\(_\mathrm{x}\) and nitrogen oxides NO\(_\mathrm{x}\) caused by fossil-fueled thermal units can be expressed by [29, 30]:
where \(\alpha _\mathrm{i}\), \(\beta _\mathrm{i}\), \(\gamma _\mathrm{i}\), \(\omega _\mathrm{i}\) and \(\mu _\mathrm{i}\) are coefficients of the ith generator emission characteristics.
2.2.5 Objective function # 5: active power transmission losses
The active power losses can be expressed by:
where NB is the number of busses and P\(_\mathrm{D}\) is the active load demand.
2.2.6 Objective function # 6: reactive power transmission losses
The reactive power losses can be expressed by:
where Q\(_\mathrm{D}\) is the reactive load demand.
2.3 Constraints
OPF constraints can be classified into equality and inequality constraints, as detailed in the following sections.
2.3.1 Equality constraints
-
(a)
Real power constraints:
$$\begin{aligned} P_{Gi} -P_{Di} -V_i \sum \limits _{j=i}^{NB} V_j \left[ {G_{ij} \cos ( {\theta _{ij} })+B_{ij} \sin ( {\theta _{ij} })} \right] =0 \end{aligned}$$(12) -
(b)
Reactive power constraints:
$$\begin{aligned} Q_{Gi} -Q_{Di} -V_i \sum \limits _{j=i}^{NB} V_j \left[ {G_{ij} \sin ( {\theta _{ij} })-B_{ij} \cos ( {\theta _{ij} })} \right] =0 \end{aligned}$$(13)
where \(\theta _{ij} =\theta _i -\theta _j \), G\(_\mathrm{ij}\) and B\(_\mathrm{ij}\) are the elements of the admittance matrix \(( {Y_{ij} =G_{ij} +j\,B_{ij} })\) representing the conductance and susceptance between bus i and bus j, respectively.
2.3.2 Inequality constraints
-
(a)
Generator constraints
$$\begin{aligned} V_{G_i }^{\min } \le V_{G_i } \le V_{G_i }^{\max } ,\qquad i=1,\ldots ,NG \end{aligned}$$(14)$$\begin{aligned} P_{G_i }^{\min } \le P_{G_i } \le P_{G_i }^{\max } ,\qquad i=1,\ldots ,NG \end{aligned}$$(15)$$\begin{aligned} Q_{G_i }^{\min } \le Q_{G_i } \le Q_{G_i }^{\max } ,\quad i=1,\ldots ,NG \end{aligned}$$(16) -
(b)
Transformer constraints
$$\begin{aligned} T_i^{\min } \le T_i \le T_i^{\max } ,\quad i=1,\ldots ,NT \end{aligned}$$(17) -
(c)
Shunt VAR compensator constraints
$$\begin{aligned} Q_{C_i }^{\min } \le Q_{C_i } \le Q_{C_i }^{\max } ,\quad i=1,\ldots ,NC \end{aligned}$$(18) -
(d)
Security constraints
2.3.3 Constraints handling
It is worth mentioning that control variables are self-constrained. The inequality constraints of dependent variables which contain load bus voltage magnitude; real power generation output at slack bus, reactive power generation output and line loading can be included into the objective function as quadratic penalty terms. In these terms, a penalty factor multiplied with the square of the disregard value of dependent variable is added to the objective function [19, 20].
It is worth mentioning that, Eqs. (3)–(20) present the complete formulation of the OPF problem adopted in this work. It is worth mentioning that other formulations exist which involve only quadratic and bilinear terms [31].
3 Grenade explosion method (GEM)
3.1 Overview
The GEM is a novel metaheuristic for optimizing real-valued bounded black-box optimization problems inspired by the mechanism of grenade exposition [25, 26]. In the GEM, once the grenades explode, the resulting shrapnel hit objects that are located within a neighborhood radius called L\(_\mathrm{e}\). The damages caused by shrapnel on objects are calculated. The damage-per-shrapnel value indicates the value of objects in that area. In order to cause more damage, the next grenade is thrown in the location of the greatest damage that has been caused. The overall damage caused by the hit is considered as the fitness of the solution at the object’s location.
Furthermore, the GEM has a unique feature, which is the concept of agent’s territory radius (R\(_\mathrm{t})\) [25, 26]. Each agent (a grenade here), does not allow other agents to come closer than a certain distance that is R\(_\mathrm{t}\). Therefore, when several grenades expose in the search space, a high value of R\(_\mathrm{t}\) guarantees that grenades are spared quit uniformly in the search space while a small value of R\(_\mathrm{t}\) allows the grenades to search local regions together [25, 26].
3.2 Algorithm
The pseudo code of the GEM is given in Algorithm 1. The GEM starts by scaling all independent variables within the interval [−1,1]. Then, the problem parameters like the number of grenades (N\(_\mathrm{g})\) and the maximum number of iterations (Max_iterations) are selected and L\(_\mathrm{e}\) and R\(_\mathrm{t}\) are initialized. After that, Ng grenades, distant by R\(_\mathrm{t}\) from each other, are randomly generated in the n-dimensional scaled space. These grenades are ranked in a descending order based on their fitness. For each grenade Nq pieces of shrapnel are generated using the following expression:
where \(X_m \)is the location of the grenade, \(r_m \) is a uniformly distributed random number in [−1,1] and p is a constant used to tune the intensity of the exploration. The value of p is updated using the probability of territory search (T\(_\mathrm{w})\) as follows:
While generating the Nq pieces of shrapnel, some produced shrapnel may collide to objects outside the scaled feasible space and they have to be transported to the [−1,1]\(^\mathrm{n}\) interval.
Then, the damage caused by every piece of shrapnel around a grenade is computed. If the fitness of the best generated point is better than the fitness of the current location of the grenade, the position of the grenade is updated and the grenade moves to the location of the best point.
To increase the global search ability, L\(_\mathrm{e}\) and R\(_\mathrm{t}\) are adjusted during the iterations. High values of these parameters are necessary to cover the whole search space in initial iterations, however, they have to be reduced over iterations with taking fitness value into account. The territory radius is updated as follows:
where \(R_{rd} \) represents the ratio of the value of R\(_\mathrm{t}\) in the first iteration to its value in the last iteration and it has to be set before the algorithm starts.
Likewise, L\(_\mathrm{e}\) is decreased over iterations as follows:
where m is calculated using the following expression:
In order to save global search ability, the rate of decrease of L\(_\mathrm{e}\) during the iterations is slower than the one of R\(_\mathrm{t}\) [25, 26]. Once L\(_\mathrm{e}\) and R\(_\mathrm{t}\) are adjusted the value of p has to be updated accordingly. Finally, the termination criterion used in the GEM is the number of iterations i.e., if the number of iterations exceeds the maximum value the algorithm stops.

4 The proposed multiobjective optimization approach
A complete optimal solution that simultaneously optimizes all the objective functions of a Multiobjective Optimization (MOO) problem usually does not exist especially when the objective functions present a conflicting behavior like in MOPF. Therefore, the task is to find a Pareto optimal solution. A point x\(_{0}\in \)X is said to be a Pareto optimal solution to an optimization problem P if there is no x\(\in \)X such that F(x)\(\le \) F(x\(_{0})\) [32].
For the MOPF problem, considering the vague or fuzzy nature of human judgment, it is quite logic to assume that the decision maker (DM) may have a fuzzy goal for each of the objective functions. Therefore, objective functions can be replaced by fuzzy membership functions.
The following steps describe the proposed MOPF approach in this paper:
-
Step 1: Minimization and maximization of each objective function separately in order to calculate the individual minimum and maximum values of each objective function under constraints.
-
Step 2: Computation of the membership functions \(\mu _1 ,\mu _2 ,\ldots \mu _k \) by taking into account the calculated individual maximum and maximum values of each objective function in step 1.
-
Step 3: Computation of the aggregation function \(\mu _D ( {\mu _1 ,\mu _2 ,\ldots \mu _k })\).
-
Step 4: Maximization of \(\mu _D \) using the GEM method.
-
Step 5: If the DM is satisfied with the current results i.e., the values of the membership functions, go to step 6. Otherwise, modify the aggregation function then go to step 4.
-
Step 6: Stop and print optimal results.
The first step of the of the proposed approach consists of minimizing then maximizing each objective function separately in order to compute the maximum and minimum values of each objective function. These two values correspond to the best and worst values that can each objective function reach, respectively. Then, using these values, fuzzy membership functions are calculated. The membership function of the ith objective is defined by [32]:
where: \(\text{ f }_{i}^{\text{ max }} \) and \(\text{ f }_{i}^{\text{ min }} \) are the maximum and minimum values of the ith objective function, respectively. Therefore, a membership function of a given objective is equal to 1 if this objective is fully satisfied (Fig. 1).

Linear fuzzy membership function for fuzzy goal
Once the membership functions are calculated, they are aggregated in one objective function as shown in Fig. 2. The aggregation function can be seen as the satisfaction degree of the objective defined by the user [33].

Flow chart of fuzzy aggregation for the six objective functions
There are many aggregation methods that can be used. In this paper four methods are investigated.
The weighted sum method: The first aggregation function investigated in this paper is the most evident one that is the weighted sum method where the membership functions are multiplied by weights then summed to give an aggregation function as follows:
where \(\omega _1 \),\(\omega _1 ,\omega _2 ,\ldots \omega _k \) are weighting factors or weights. Usually, the weights are greater than or equal to 0 and their sum equals 1.
The exponential weighted method: The second aggregation function considered in this study is the exponential weighted method. This method has been proposed due to the inability of the weighted sum method to capture points on non-convex portions of the Pareto optimal surface [34]. Therefore, \(\mu _D \) can be expressed by:
where p \(=\) 1 in this study.
The minimum operator: For the third aggregation function, we consider the well-known fuzzy decision of Belmann and Zadeh or the minimum operator as follows [33]:
The \(\varvec{\upvarepsilon }\)-constraint method: In many cases, all objective functions do not have the same importance, for instance reducing the generation fuel cost is usually more important than reducing losses or emission. In fact, the fuel cost minimization is the most important objective to achieve. However, at the same time the remaining objectives have to be taken into consideration in a way or another. In this case using a method like the \(\varepsilon \)-constraint method is very interesting. This method (also called the e-constraint or trade-off method) optimizes one of the objective functions while imposing constraints on the remaining objective functions. In other words, it minimizes one objective function (the most important one) and at the same time it maintains acceptable levels for the remaining objective functions [35]. Thus, the aggregation function can be expressed by:
where \(\left\{ {\varepsilon _2 ,\varepsilon _3 ,\ldots ,\varepsilon _k } \right\} \) are the vector of constraints to be chosen by the DM or sometimes it can be imposed by some regulations.
In order to circumvent the numerical problem posed by the constraints they are augmented in into \(\mu _d \) using the following expression:
where \(\lambda _{j}\) are penalty factors and j takes the value of all the violated constraints.
5 Application and results
The proposed GEM method has been applied to the IEEE 30-bus test system. This test system has a total generation capacity of 435 MW and its main characteristics are given in Table 1. Detailed data about these test systems can be derived from [36]. Cost and emission coefficients used in this paper are given in Table 2.
It is worth to mention that, the developed software program is written in the commercial MATLAB computing environment and applied on a 2.20 GHz i7 personal computer with 8.00 GB-RAM using parallel processing to run the 30 different runs.
This paper investigates 12 cases. The first six cases are single objective OPF cases whilst the remaining cases are MOPF cases.
The control parameters of the GEM method are given Table 3. These parameters have been selected after several tests.
5.1 Single objective OPF
The single objective OPF cases are:
-
CASE 1: minimization of generation fuel cost.
-
CASE 2: improvement of voltage profile by the minimization of voltage deviation.
-
CASE 3: enhancement of the voltage stability by the minimization of voltage stability index.
-
CASE 4: reduction of emission.
-
CASE 5: minimization of active losses.
-
CASE 6: minimization of reactive losses.
The proposed GEM has been applied to solve CASE 1 through CASE 6 and the obtained optimal settings are given in Table 4.
In order to assess the effectiveness of the proposed method we have compared it to some other well-known methods. The results of this comparison are displayed in Table 5. For more comparison, and since CASE 1 has been widely investigated in the literature, the results found for this case are compared to those found in the literature in Table 6. It appears that the GEM outperforms many other optimization methods.
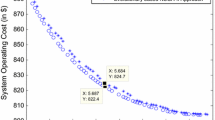
Figure 3 shows the evolution of cost and penalty term versus iterations for CASE 1. In Fig. 4 the evolution of the voltage deviation versus iterations for CASE 2 is shown. Furthermore, the voltage profile obtained for CASE 2 is sketched in Fig. 5. The evolution of voltage stability index versus iterations for CASE 3 is given in Fig. 6.

Evolution of the objective function versus iterations for CASE 1

Evolution of VD versus iterations for CASE 2

Voltage profile for CASE 2

Evolution of Lmax versus iterations for CASE 3
Before starting solving the MOPF cases, let us start by analyzing the results found when only one objective is considered at the time. In Table 7, the fuzzy membership functions of all objectives are calculated. We can see from this table that, when an objective function is optimized its membership function equals to 1 i.e., the objective is fully achieved. However, the remaining membership functions lie between 0 and 1. For instance, when the cost is minimized \(\mu _\mathrm{E} =0.3061\) and \(\mu _{QL} =0.4605\) while \(\mu _{\mathrm{L}\max } =0.9790\). These values indicate the nature and intensity of the conflict between these objective functions. The same analysis can be made on the remaining objectives.
Furthermore, a statistical analysis has been made in order to compute the correlation coefficients between the six objectives (Table 8). Note that the correlation coefficient (r) is a dimensionless measure of the degree of linear association or dependence between two sets of data X and Y that varies between [−1,1] where: r \(=\) 0 indicates that there is no linear dependence between X and Y, r \(=\) 1 indicates that there is a total dependence with X and Y varying in the same direction and r \(=\) −1 indicates that there is a total dependence with X and Y varying in the opposite direction [45]. Therefore, the closer the coefficient is to either −1 or 1, the stronger the correlation between the sets of data. The correlation coefficients can be arranged, into a symmetrical correlation matrix, where each element is the correlation coefficient of the respective column and row variables. Since the matrix is symmetrical, we show only the upper triangular part of this matrix. From Table 8, it appears for example that there is a strong correlation between cost and emission in opposite directions (r \(=\) −0.8948). the coefficient of correlation computed between emission and active losses (r \(=\) 0.9938) shows that there is a strong correlation in the same direction between these two objectives. The same analysis can be made on the remaining results.
5.2 Multiobjective OPF
The six MOPF cases investigated in this paper are summarized below:
-
CASE 7: the weighted sum method is used as an aggregation function with \(\omega _1 =\omega _2 =\omega _3 =\omega _4 =\omega _5 =\omega _6 =\omega =\frac{1}{6}\).
-
CASE 8: in this case, the minimum operator is used to generate the aggregation function.
-
CASE 9: exponential weighted method is used here to generate the aggregation function with \(\omega _1 =\omega _2 =\omega _3 =\omega _4 =\omega _5 =\omega _6 =\omega =1\). CASE 10: the \(\varepsilon \)-constraint method is explored where the objective to be optimized is the cost and \(\varepsilon _2 =0.75,\varepsilon _3 =0.75,\varepsilon _4 =0.75,\varepsilon _5 =0.75\) and \(\varepsilon _6 =0.75\) are the constraints that are imposed on the remaining objectives.
-
CASE 11: the \(\varepsilon \)-constraint method is used where the objective to be optimized is the cost and \(\varepsilon _2 =0.75,\varepsilon _3 =0.75,\varepsilon _4 =0.5,\varepsilon _5 =0.5\) and \(\varepsilon _6 =0.5\) are the constraints that are imposed on the remaining objectives.
-
CASE 12: the \(\varepsilon \)-constraint method is tested where the objective to be optimized is the cost and \(\varepsilon _2 =0.5, \varepsilon _3 =0.5, \varepsilon _4 =0.5, \varepsilon _5 =0.5 \)and \(\varepsilon _6 =0.5\) are the constraints that are imposed on the remaining objectives.
In order to compare the relative efficiencies of the different MOO techniques applied to solve MOPF problems, we use the Euclidean distance N, which is defined as follows:
N gives an indication on how much a solution is close to the utopia point. Therefore, the lower the value of N the better the MOO is [46].
The GEM has been applied to solve the above mentioned MOPF cases and the optimal results are given in Table 9. The N index is given in the last row of Table 9.
From Table 9, we can make the following comments:
The weighted sum method gives excellent results as shown in CASE 7. Furthermore, it is probably the simplest way to solve the MOPF problem. However, the weights associated with each objective functions have to be carefully selected, which is a cumbersome task for the DM.
The minimum operator method applied in CASE 8 achieves good results (\(N=0.6605\)). However, there is no control on the objectives. In other words, this method treats all objectives as they have the same importance which not the case in MOPF problems.
The exponential weighted method used in CASE 9 gives bad results as shown by the higher value of the Euclidian distance (\(N=1.66\)).
The \(\varepsilon \)-constraint method used in CASE 10, CASE 11 and CASE 12 is very interesting in solving MOPF problems for many reasons. As previously mentioned, in power system planning, minimizing the generating fuel cost is for sure the most important objective however; other issues and/or objectives have to be taken into consideration as additional constraints rather than to be included as objectives. This is more true in complex systems where the DM does not know exactly the values of objective functions and then he cannot tune or select weights like in weighted methods. However, he can impose constraints as percentages of the objective functions even without knowing their values.
6 Conclusion
In this paper, a recently developed metaheuristic, which is the grenade explosion method, is used to solve multiobjective optimal power flow problems. Six objective functions are considered namely: the minimization of generation fuel cost, the improvement of voltage profile, the enhancement of voltage stability, the reduction of emission and the minimization of active and reactive transmission losses. The fuzzy decision making approach is utilized to handle the multiobjective OPF problem. The correlation between different objectives is identified. Many multiobjective approaches are investigated which are the weighted sum method, the exponential weighted method, the minimum operator and the \(\varepsilon \)-constraint method. The obtained results show the efficiency of the GEM method when solving the OPF problem for single objective and multiobjective cases.
References
Cain, M., O’neill, R., Castillo, A.: History of optimal power flow and formulations, FERC Staff Tech. Pap., pp. 1–36 (2012)
Glavitsch, H., Bacher, R.: Optimal power flow algorithms. In: Anal. Control Syst. Tech. Electr. Power Syst, vol. 41. Acad. Press Inc (1991)
Sivasubramani, S., Swarup, K.S.: Multiagent based differential evolution approach to optimal power flow. Appl. Soft Comput. J. 12, 735–740 (2012). doi:10.1016/j.asoc.2011.09.016
Frank, S., Steponavice, I., Rebennack, S.: Optimal power flow: a bibliographic survey I formulations and deterministic methods. Energy Syst. 3, 221–258 (2012). doi:10.1007/s12667-012-0056-y
Bai, X., Wei, H., Fujisawa, K., Wang, Y.: Semidefinite programming for optimal power flow problems. Int. J. Electr. Power Energy Syst. 30, 383–392 (2008). doi:10.1016/j.ijepes.2007.12.003
Gopalakrishnan, A., Raghunathan, A.U., Nikovski, D., Biegler, L.T., Global optimization of optimal power flow using a branch & bound algorithm. In: Commun. Control. Comput. (Allerton), 2012 50th Annu. Allert. Conf., pp. 609–616 (2012)
AlRashidi, M., El-Hawary, M.: Applications of computational intelligence techniques for solving the revived optimal power flow problem. Electr. Power Syst. Res. 79, 694–702 (2009). doi:10.1016/j.epsr.2008.10.004
Frank, S., Steponavice, I.: Optimal power flow: a bibliographic survey II non-deterministic and hybrid methods. Energy Syst. (2012) 259–289. doi:10.1007/s12667-012-0057-x
Yuryevich, J.: Evolutionary programming based optimal power flow algorithm. IEEE Trans. Power Syst. 14, 1245–1250 (1999). doi:10.1109/59.801880
Paranjothi, S.R., Anburaja, K.: Optimal power flow using refined genetic algorithm. Electr. Power Compon. Syst. 30, 1055–1063 (2002). doi:10.1080/15325000290085343
Abido, M.A.: Optimal power flow using particle swarm optimization. Int. J. Electr. Power Energy Syst. 24, 563–571 (2002). doi:10.1016/S0142-0615(01)00067-9
Abido, M.A.: Optimal power flow using tabu search algorithm. Electr. Power Compon. Syst. pp. 469–483 (2002). doi:10.1080/15325000252888425
Roa-Sepulveda, C.A., Pavez-Lazo, B.J.: A solution to the optimal power flow using simulated annealing. Int. J. Electr. Power Energy Syst. 25, 47–57 (2003). doi:10.1016/S0142-0615(02)00020-0
Optimal power flow using differential evolution algorithm: Abou El Ela, A.A., Abido, M.A., Spea, S.R. Electr. Power Syst. Res. 80, 878–885 (2010). doi:10.1016/j.epsr.2009.12.018
Chattopadhyay, A.B.P.K.: Application of biogeography-based optimisation to solve different optimal power flow problems 5, 70–80 (2011). doi:10.1049/iet-gtd.2010.0237
Ghanizadeh, A.J., Mokhtari, G., Abedi, M., Gharehpetian, G.B.: Optimal power flow based on imperialist competitive algorithm. Int. Rev. Electr. Eng. 6, 1847–1852 (2011)
Bouchekara, H.R.E.H., Abido, M.A., Chaib, A.E., Mehasni, R.: Optimal power flow using the league championship algorithm: a case study of the Algerian power system. Energy Convers. Manag. 87, 58–70 (2014). doi:10.1016/j.enconman.2014.06.088
Bouchekara, H.R.E.H.: Optimal power flow using black-hole-based optimization approach. Appl. Soft Comput. (2014). doi:10.1016/j.asoc.2014.08.056
Bouchekara, H.R.E.H., Abido, M.A., Boucherma, M.: Optimal power flow using teaching-learning-based optimization technique. Electr. Power Syst. Res. 114, 49–59 (2014). doi:10.1016/j.epsr.2014.03.032
Bouchekara, H.R.E.-H., Abido, M.A.: Optimal power flow using differential search algorithm. Electr. Power Compon. Syst. 42, 1683–1699 (2014). doi:10.1080/15325008.2014.949912
Bouchekara, H.R.E.H., Chaib, A.E., Abido, M.A., El-Sehiemy, R.A.: Optimal power flow using an improved colliding bodies optimization algorithm. Appl. Soft Comput. 42, 119–131 (2016). doi:10.1016/j.asoc.2016.01.041
Bouchekara, H.R.E.-H., Abido, M.A., Chaib, A.E.: Optimal power flow using an improved electromagnetism-like mechanism method. Electr. Power Compon. Syst. 44, 434–449 (2016). doi:10.1080/15325008.2015.1115919
Chaib, A.E., Bouchekara, H.R.E.H., Mehasni, R., Abido, M.A.: Optimal power flow with emission and non-smooth cost functions using backtracking search optimization algorithm. Int. J. Electr. Power Energy Syst. 81, 64–77 (2016). doi:10.1016/j.ijepes.2016.02.004
Sorensen, K.: Metaheuristics-the metaphor exposed. Int. Trans. Oper. Res. 22, 3–18 (2015). doi:10.1111/itor.12001
Ahrari, A., Atai, A.A.: Grenade explosion method–a novel tool for optimization of multimodal functions. Appl. Soft. Comput. J. 10, 1132–1140 (2010). doi:10.1016/j.asoc.2009.11.032
Ahrari, A., Shariat-Panahi, M., Atai, A.A.: GEM: a novel evolutionary optimization method with improved neighborhood search. Appl. Math. Comput. 210, 376–386 (2009). doi:10.1016/j.amc.2009.01.009
Kessel, P., Glavitsch, H.: Estimating the voltage stability of a power system. IEEE Trans. Power Deliv. 1, 346–354 (1986). doi:10.1109/TPWRD.1986.4308013
Behrangrad, M., Sugihara, H., Funaki, T.: Effect of optimal spinning reserve requirement on system pollution emission considering reserve supplying demand response in the electricity market. Appl. Energy. 88, 2548–2558 (2011). doi:10.1016/j.apenergy.2011.01.034
Abido, M.A.: Environmental/economic power dispatch using multiobjective evolutionary algorithms. IEEE Trans. Power Syst. 18, 1529–1537 (2003). doi:10.1109/TPWRS.2003.818693
Jubril, A.M., Olaniyan, O.A., Komolafe, O.A., Ogunbona, P.O.: Economic-emission dispatch problem: a semi-definite programming approach. Appl. Energy 134, 446–455 (2014). doi:10.1016/j.apenergy.2014.08.024
Frank, S., Rebennack, S.: A primer on optimal power flow: theory, formulation, and practical examples. Colorado School of Mines, Tech. Rep (2012)
Collette, Y., Siarry, P.: Optimisation multiobjectif. ÉDITIONS EYROLLES, Paris (2002)
Sakawa, M.: Genetic Algorithms And Fuzzy Multiobjective Optimization. Kluwer Academic Publishers Norwell, MA, USA (2001)
Marler, R.T., Arora, J.S.: Survey of multi-objective optimization methods for engineering. Struct. Multidiscip. Optim. 26, 369–395 (2004). doi:10.1007/s00158-003-0368-6
Engin, T.J., Sci, E.: A comparative study of multiobjective optimization methods in ok Objektifli Optimizasyon Tekniklerinin Mukayeseli Bir. Chem. Eng. 25, 69–78 (2001)
C.E.M.-S. & D. (David) G. Ray D. Zimmerman, MATPOWER, http://www.pserc.cornell.edu/matpower
Vaisakh, K., Srinivas, L.R., Meah, K.: A genetic evolving ant direction DE for OPF with non-smooth cost functions and statistical analysis. Energy, pp. 3155–3171 (2010). doi:10.1007/s00202-012-0251-9
Vaisakh, K., Srinivas, L.R.: Evolving ant direction differential evolution for OPF with non-smooth cost functions. Eng. Appl. Artif. Intell. 24, 426–436 (2011). doi:10.1016/j.engappai.2010.10.019
Liang, R.-H., Tsai, S.-R., Chen, Y.-T., Tseng, W.-T.: Optimal power flow by a fuzzy based hybrid particle swarm optimization approach. Electr. Power Syst. Res. 81, 1466–1474 (2011). doi:10.1016/j.epsr.2011.02.011
Lai, M.Z.L.L., Ma, J.T., Yokoyama, R.: Improved genetic algorithms for optimal power flow under both normal and contingent operation states. Electr. Power Energy Syst. 19, 287–292 (1997)
Bakirtzis, A.G., Biskas, P.N., Zoumas, C.E., Petridis, V.: Optimal power flow by enhanced genetic algorithm. IEEE Trans. Power Syst. 17, 229–236 (2002). doi:10.1109/TPWRS.2002.1007886
Sayah, S., Zehar, K.: Modified differential evolution algorithm for optimal power flow with non-smooth cost functions. 49, 3036–3042 (2008). doi:10.1016/j.enconman.2008.06.014
Ongsakul, W., Tantimaporn, T.: Optimal power flow by improved evolutionary programming. Electr. Power Components Syst. 34, 79–95 (2006). doi:10.1080/15325000691001458
Lee, K.Y., Park, Y.M., Ortiz, J.L.: A united approach to optimal real and reactive power dispatch. IEEE Trans. Power Appar. Syst. PAS-104, 1147–1153 (1985). doi:10.1109/TPAS.1985.323466
Marques De Sá, J.P.: Applied statistics using SPSS, STATISTICA. MATLAB and R (2007). doi:10.1007/978-3-540-71972-4
Bouchekara, H.R.E.H., Kedous-Lebouc, A., Yonnet, J.P., Chillet, C.: Multiobjective optimization of AMR systems. Int. J. Refrig. 37, 63–71 (2014). doi:10.1016/j.ijrefrig.2013.09.009
Acknowledgments
Dr. M. A. Abido would like to acknowledge the support provided by King Abdulaziz City for Science and Technology (KACST) through the Science and Technology Unit at King Fahd University of Petroleum and Minerals (KFUPM) for funding this work through Project # 14-ENE265-04 as a part of the National Science, Technology and Innovation Plan (NSTIP).
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Bouchekara, H.R.E.H., Chaib, A.E. & Abido, M.A. Multiobjective optimal power flow using a fuzzy based grenade explosion method. Energy Syst 7, 699–721 (2016). https://doi.org/10.1007/s12667-016-0206-8
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12667-016-0206-8