
Abstract
The current study analyses the effect of root zone soil moisture in the calibration and validation of Soil and Water Assessment Tool (SWAT) model. A multi-algorithm, genetically adaptive multi-objective method (AMALGAM) is used for the calibration of the model. The multi-variable calibration considering both streamflow and soil moisture is compared with a single-variable calibration considering streamflow and then analysed the effectiveness of root zone soil moisture in the calibration of SWAT. The results of the analysis show that the root zone soil moisture significantly influences the simulation of evapotranspiration component in SWAT. The SOL_AWC and SOL_K are found to be the key parameters for the simulation of hydrological fluxes in SWAT. The multi-variable calibration at the watershed outlet ensures a better process representation and spatial prediction in SWAT compared to the single-variable calibration approach.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
SWAT is a physics-based semi-distributed hydrological model widely used for water resources planning and management on a watershed scale (Gassman et al. 2007; Gassman et al. 2014; Athira et al. 2016). The SWAT model is capable of simulating the streamflow, sediment and nutrient transport in a watershed (Arnold et al. 2015). SWAT represents the complex hydrological systems through conservation laws and encompasses a multitude of parameters for process representation. Hence, the predictive power of SWAT depends on the calibration process. The streamflow information at the watershed outlet is used to calibrate the parameters. However, studies have reported that calibration with a single variable at the watershed outlet cannot ensure better process representation in the model (Anderton et al. 2002; Cao et al. 2006; Wanders et al. 2014a,b). Researchers have used different optimization schemes for autocalibration of the SWAT model. The commonly used schemes are Generalized Likelihood Uncertainty Estimation (GLUE, Beven 1992), Shuffled Complex Evolutionary Algorithms (Sharma et al. 2006a,b), Particle Swarm Optimization (Zhang et al. 2008a,b), Genetic Algorithm (Zhang et al. 2009), AMALGAM (Her et al. 2015), Sequential Uncertainty Fitting (SUFI) (Abbaspour et al. 2015), etc. The autocalibration capabilities are incorporated in SWAT through the software SWAT-CUP (Abbaspour et al. 2009). Depending on the number of parameters involved, the calibration process becomes complex and the computational demand will increase.
The result of the calibration process also depends on the performance index that is used for comparison of the simulated and measured variables. Moriasi et al. (2015) have reported that the most commonly used statistical performance indices for hydrological model evaluation are Nash Sutcliffe Efficiency (NSE), Root Mean Square Error (RMSE) and Coefficient of Determination (R2). These performance indices are functions of squared deviations of observed and simulated calibration variable and they are always biased towards the high flow prediction (Moriasi et al. 2007). Muleta (2011) has analysed the effect of performance indices on the automatic calibration of SWAT model. The study recommends the use of performance indices which are based on the absolute deviations since it can give better prediction in both high and low flow ranges. The performance indices in this category are Mean Absolute Error (MAE), Modified Nash Sutcliffe Efficiency (MNSE), and Volumetric Efficiency (VE) etc. The limitations of the performance indices have resulted in the development of multi-objective calibration for hydrological models (Gupta et al. 1998). The prediction from multi-objective calibration can be improved by considering performance indices from different performance index categories.
A multi-objective calibration which considers more than one performance index for evaluating the same calibration variable leads to a better prediction in all the flow ranges (Bekele and Nicklow 2007). This calibration approach will improve the prediction at the watershed outlet, but this may not guarantee a better spatial prediction in a heterogeneous watershed. A multi-site calibration considering measured information from different gauging points in a watershed can overcome this issue (Nkiaka et al. 2018). The parameters estimated by optimizing the objective function at different subbasin outlets can produce better predictions than those obtained from a single site calibration (Zhang et al. 2008a,b). However, the use of multiple stream gauging stations for calibration may not ensure an improved simulation of other surface and sub-surface fluxes in the watershed (Wanders et al. 2014a,b). A multi-variable calibration considering an internal state variable such as soil moisture, evapotranspiration, baseflow, etc. along with streamflow can improve the parameter estimation in process-based distributed models (Anderton et al. 2002; Cao et al. 2006; Rajib et al. 2016). A multi-variable calibration is ideal for highly heterogenous watersheds. There are studies which used remotely sensed Evapotranspiration (ET), baseflow and soil moisture for multivariable calibration in SWAT model (Zhang et al. 2011; Herman et al. 2018; Immerzeel and Droogers 2008; Tobin and Bennett 2017; Brocca et al. 2012; Chen et al. 2011; Rajib et al. 2016). It is observed that the inclusion of root zone soil moisture for calibration results in improved water budgeting of the watershed and it reduces the parametric uncertainty in SWAT as compared to other hydrological fluxes (Rajib et al. 2016; Wanders et al. 2014a,b).
Even though soil moisture is considered as an important physical variable for hydrological modelling, soil moisture data availability is limited. The common approaches for obtaining soil moisture data are in situ soil moisture measurement, remote sensing, and modelled data (Brocca et al. 2017). The hydrological/land surface models are widely used for the simulation of soil moisture flux on a watershed scale (Dirmeyer et al. 2000; Heathman et al. 2003; Parajka et al. 2006; Shi et al. 2015). Machine Learning techniques are also used for soil moisture estimation (Adeyemi et al. 2016; Cai et al. 2019; Adab et al. 2020; Al-Mukhtar 2016). The soil moisture estimates are widely used for different applications such as rainfall-runoff modelling, irrigation, landslide modelling, flood and drought management, etc. (Chen et al. 2011; Wanders et al. 2014a,b; Cammalleri et al. 2016; Adeyemi et al. 2018). There are studies that reported the effect of soil moisture on surface runoff generation, streamflow and evapotranspiration in a watershed based on field measured experimental dataset (Vivoni et al. 2008, Penna et al. 2011; Zhao et al. 2014, Grillakis et al. 2016). However, the representation of these processes and process interactions will vary in different hydrological models depending on the model structure. Rajib et al. (2016) have reported that the use of root zone soil moisture in SWAT model calibration can improve water and energy budget in a watershed. However, a detailed analysis on the impact of root zone soil moisture on the SWAT model simulation of other hydrological fluxes like streamflow, evapotranspiration and baseflow is missing in the literature. Hence, the objective of the current study is to analyse the effect of root zone soil moisture on the simulation of other hydrological fluxes in SWAT. The analysis is conducted by comparing the process representation in SWAT model setups which are calibrated with and without the soil moisture data and it is demonstrated in the Little River Experiment Watershed (LREW), USA.
Materials and methods
SWAT model description
SWAT is a widely accepted process-based semi-distributed model, which is developed by the Agricultural Research Service of United States Department of Agriculture (USDA). It is a watershed scale model developed for analysing the impact of agricultural management activities on streamflow, sediment, and nutrients. It is computationally very efficient for doing continuous daily simulations for a longer period. The number of parameters involved in SWAT are high, since it discretizes the watershed spatially to account for the watershed heterogeneity. SWAT divides the watershed into sub-basins based on the topographic features of the watershed. Furthermore, these sub-basin areas are divided into Hydrological Response Units (HRUs). HRU delineation is based on unique combination of land use, hydrologic soil group, and slope within each sub-basin. The SWAT model simulations are occurring in HRUs with the input information of weather, soil properties, topography, landuse, and land management practices corresponding to the watershed. SWAT simulates the fluxes like streamflow, evapotranspiration, soil water, and loadings like sediments and nutrients for each HRU individually. These outputs from each HRU are summed up together to get the sub-basin outputs. Water balance equation is the governing equation for SWAT simulation
where \({SW}_{t}\) is the final soil water content (mm H2O), \({SW}_{0}\) is the initial soil water content (mm H2O), \({R}_{\mathrm{day}}\) is the amount of precipitation on day \(i\) (mm H2O), \({Q}_{\mathrm{surf}}\) is the amount of surface runoff on day \(i\) (mm H2O), \({E}_{a}\) is the amount of evapotranspiration on day \(i\) (mm H2O), \({w}_{\mathrm{seep}}\) is the amount of percolation and bypass flow exiting the soil profile bottom on day \(i\) (mm H2O), and \({Q}_{gw}\) is the amount of return flow on day \(i\) (mm H2O).
In SWAT, Soil Conservation Services (SCS) Curve Number (CN) method (USDA-SCS, 1972) and Green-Ampt infiltration method (1911) are the two approaches provided to simulate the surface runoff. The SCS curve number method estimates the surface runoff after accounting the initial abstraction. The runoff generation process in the SWAT model is directly related to the parameter Curve Number (CN2_f) which is the most significant parameter for streamflow prediction in SWAT. The watersheds with elongated shape will have time of concentration more than a day and that is accounted in SWAT through the parameter Surface Lag (SURLAG). The potential evapotranspiration of a watershed can be estimated in three approaches in SWAT; Hargreaves method, Priestly Taylor method and Penman–Monteith method. The actual evapotranspiration is estimated in SWAT by accounting the canopy storage, transpiration and soil water evaporation. The parameters ESCO and EPCO are related to the evapotranspiration process in SWAT. Soil moisture is one of the important variables which affect all the hydrological process. The parameters related to the soil moisture simulation in SWAT are SOL_AWC and Soil Hydraulic Conductivity, SOL_K. The parameter SOL_AWC indicates the plant available water content of the soil layer (mm H2O/mm soil). The SOL_AWC values are taken from pedo-transfer functions based on the percentage sand, silt and clay. In principle, the value of SOL_AWC is obtained by subtracting the fraction of water present at the permanent wilting point from that present at field capacity. Field Capacity is the water content at a soil matric potential of − 0.033 MPa. Permanent Wilting Point is the soil water content at a soil matric potential of − 1.5 MPa. The calibrated SOL_AWC value is used for calculating the Field Capacity in SWAT since it is a critical moisture content for the estimation of hydrological processes like evapotranspiration and percolation.
The soil layer will become saturated when the soil moisture content exceeds the field capacity. The excess amount of water percolates to the lower layers if the soil moisture of the lower layer is less than the field capacity. Once all the layers are saturated, the percolated water will reaches the shallow aquifer. SWAT simulates both the unconfined (shallow aquifer) and confined aquifer (deep aquifer). The parameters GWQMN, GW_REVAP, ALPHA_BF, and GW_DELAY are related to the groundwater component of the SWAT model. A detailed description of all the parameters is presented in Table 1 with its permissible range. The SWAT parameters are in two levels; basin-level parameters, and HRU level parameters. The range type (r—relative or a—absolute), units, and permissible range of these parameters are mentioned in Table 1. The permissible range is specified in such a way that the parameter value stays within the realistic range (Vema and Sudheer 2020). The default value of HRU level parameters are assigned based on the HRU characteristics. In the calibration process, the percentage deviation from the default value is fine-tuned in HRU level parameters, and the absolute value of the parameter are fine-tuned for basin level parameters.
Study area
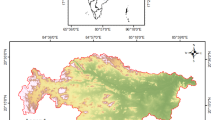
Little River Experimental Watershed (LREW) is located near Tifton, Georgia in USA. The watershed is having a drainage area of 340 km2 with a slow moving stream system. LREW is situated in the coastal plain region of USA. The landscape area of LREW is having high vegetation cover with predominant land use as woodland (40%). The other land use patterns in the watershed are Agricultural land (36%), Pasture (18%) and Water (5%). The major agricultural activity in the watershed is the cultivation of raw crops, primarily peanut and cotton (Sahoo et al. 2008). Soils having loamy sand texture are predominant in the watershed with an infiltration rate of approximately 5 cm/hr. Climatic condition in the watershed is humid subtropical. The annual mean precipitation over the watershed is estimated to be 1200 mm and mean annual temperature is 18.67 °C. January is the coldest month of the year with an average temperature of 10.6 °C and July is the warmest month with an average temperature of 26.8 °C. The geology of the watershed returns the infiltrated water to the main channel as lateral flow. There is a high temporal variability in the rainfall throughout the year. Research studies on the water balance of LREW have shown that the streamflow generation in the watershed is around 30% of the annual rainfall and 70% of the annual rainfall contributes to the evapotranspiration process (Feyereisen et al. 2007). Return flow from the shallow aquifer is 24% of annual rainfall and direct surface runoff is around 6% of annual rainfall in LREW. Deep seepage and recharge to the deep aquifers is less in LREW, as the surface soils are underlain by the Hawthorn geologic material, 0–6 m below the land surface which restrict the movement of water. It results in more groundwater flow contribution to the streamflow (Sheridan 1997). The current study considers three USGS stream gauging station data for the analysis, the USGS site GALR6840 is the watershed outlet. There are 18 soil moisture measuring stations present within the watershed and the measurements are in volumetric units.
Model setup and data used
SWAT 2012 is used in the current study and ArcSWAT GIS interface is used for setting up the SWAT model. Basic data requirement for model setup are elevation, land use, soil and meteorological information. The digital elevation model (DEM) of 30 m resolution is obtained from the United States Geological Survey-National Elevation Dataset (USGS-NED). The land cover data of 30 m resolution for the year 2011 is obtained from the National Land Cover Database (USGS-NLCD), and the State Soil Geographic Data (STATSGO) is obtained from the web soil survey (USDA-NRCS) (https://websoilsurvey.sc.egov.usda.gov/), for the watershed. As per the STATSGO database, soil data in LREW is at a depth of 250–300 mm. The streamflow, soil moisture and meteorological data are collected from Sustaining the Earth’s Watersheds–Agricultural Research Data System (STEWARDS), in the USDA website (https://www.nrrig.mwa.ars.usda.gov/stewards/stewards.html). The SWAT model setup is done for 11 years from 2006 to 2016 in the LREW. The first one year is considered as warm-up period to reduce the uncertainty associated with the initial assumptions. The period 2006–2013 is considered for calibration of the model and 2014–2016 is used for validation of the model. There are five sub-basins present in the model setup. Total 386 HRUs are present in the watershed with a HRU threshold of zero percentage for landuse, soil and slope (Table 2). The major crops in the region are Cotton and Peanut with one year crop rotation. Timely management practices are also incorporated in the model (STEWARDS, USDA). The current study considers three stream gauging station data for the analysis (Fig. 1). The watershed outlet is located in the sub-basin 5. There are 18 soil moisture measuring stations present within the watershed (Fig. 1).

Study area
The soil moisture estimates available from field sensors are in volumetric units (cm3/ cm3 or m3/m3), while SWAT simulates soil moisture in depth units (mm H2O) at daily time step. To compare the observed and SWAT simulated soil moisture, they need to be in the same units. To overcome this issue, observed soil moisture data are converted into the same depth units. In LREW, field sensors are present at a depth of 50 mm, 200 mm, and 300 mm with soil moisture estimates for every 30 min interval. The volumetric measurements are converted into depth units by multiplying it with soil moisture depth intervals. The wilting point of each soil layer is estimated using the bulk density and percentage clay of each soil layer. The wilting point component of the soil moisture storage is deducted from the soil moisture measurement and calculates the plant available water for each layer. The total available soil moisture is obtained by adding the plant available water of each layer.
Methodology
The conventional calibration approaches use streamflow data at the watershed outlet as a calibration variable, since the streamflow is considered as an integrated response of a watershed. In the calibration, the hydrological model parameters will get adjusted for a better prediction of the calibration variable at the watershed outlet. The current study analyses the potential of soil moisture data for calibration of SWAT by comparing two different calibration approaches. The Case I is a conventional single site, single-variable calibration with streamflow as calibration variable. The Case II is a single site, multi-variable calibration with both streamflow and root zone soil moisture as calibration variables. Process representation in the SWAT model setup is analysed using the built in program SWAT Check. The soft data from literature is also used to evaluate the model setup. The study considers 18 SWAT model parameters which affect the streamflow generation process. The parameters and their permissible range for calibration are presented in Table 1, here 12 parameters are HRU level parameters and remaining are basin level parameters. The current study considers all the parameters for calibration, since it focuses on analysing the impact of soil moisture on the simulation of all surface and sub-surface hydrological fluxes in the watershed.
The calibration of the SWAT model has done with AMALGAM optimizer. The AMALGAM optimizer consists of four optimization algorithms, Genetic Algorithm, Particle Swarm Optimization, Adaptive Metropolis Search and Differential Evolution. The major advantage of AMALGAM is that it can merge the strength of four different search strategies and increase the speed of convergence of solutions to pareto set (Vrugt 2015). The model performance for streamflow prediction is analysed with the performance index Nash Sutcliffe Efficiency (NSE). The NSE is one of the most commonly used performance indices for SWAT model simulations and is calculated as (Moriasi et al. 2015; Arnold et al. 2012; Feyereisen et al. 2007; Muleta 2011)
where \({O}_{i}\) and \({P}_{i}\) are the observed and simulated values for the ith pair, \(\overline{O }\) is the mean of the observed values and \(n\) is the total number of paired values. NSE value lies between − ∞ and 1, with 1 indicating a perfect fit. The soil moisture prediction of the model is quantified with the performance index Volumetric Efficiency (VE), which is a relative absolute measure and it can quantify the frequent variations in the soil moisture flux.
The value of VE ranges between − ∞ and 1 and a value close to 1 indicates the best fit simulation. The current study also uses a performance index PBIAS to quantify the performance of the calibrated parameter set. The PBIAS is capable of analysing the model performance in the medium flow ranges.
The PBIAS value ranges from − ∞ to ∞. Model performance is more accurate if the absolute PBIAS value is close to zero. A positive percent BIAS indicates underestimation bias and negative percent BIAS shows the overestimation bias (Gupta et al. 1998).
The Latin Hypercube sampling is employed in AMALGAM to generate the initial population based on the range specified for each parameter. The single-variable calibration considers the streamflow measurement at the watershed outlet for adjusting the model parameters. The model performance of each parameter set is evaluated in terms of the objective function considered in the calibration approach. The single-variable calibration optimizes the parameter set by minimizing the objective function − 1 × NSE. The multi-variable calibration considers both streamflow and in situ root zone soil moisture measurements at the watershed outlet for optimizing the SWAT model parameters. In this approach, the optimization of parameter values are done by minimizing both − 1 × NSE and − 1 × VE. The convergence of objective function is considered as a criterion to stop the optimization algorithm. Flowchart of the methodology is presented in Fig. 2. In single-variable calibration approach, 4000 iterations are conducted with a population size of 100 in each generation. The number of iterations considered in multi-variable calibration is 12,000 with a population size of 100 in each generation. The calibrated parameter sets are validated in the period 2014–2016. The spatial prediction ability of both the calibration approaches are analysed in the study. Spatial prediction is analysed only for the upstream subbasins 1 and 2 due to the limited availability of data in other subbasins. The streamflow prediction at the calibration outlet is obtained from the output.rch file in SWAT. The soil moisture comparison is also conducted on a subbasin scale. The subbasin level soil moisture is the weighted average of soil moisture estimates from all the HRUs within that subbasin. The simulated soil moisture data is extracted from model standard outputs (output.hru and output.sub). In the analysis, the subbasin level soil moisture estimates from SWAT are compared with the weighted average of soil moisture measurements from that subbasin. There are five soil moisture measurement stations present in the subbasin 5. The outlet of subbasin 5 is the watershed outlet and the streamflow and average soil moisture measurement at the outlet is considered for calibration of the model.

Flowchart for the proposed methodology
The effect of improved soil moisture simulation on the process representation of calibrated SWAT model is analysed by a diagnostic test based on vertical soil moisture profile (McMillan et al. 2011). The improved soil moisture simulation can give a reliable vertical soil moisture profile in the watershed. The moisture content in soil layers fluctuates seasonally in a year. The seasonal variations in the soil moisture distribution will significantly affect the evapotranspiration process in a watershed. The evapotranspiration demand of the watershed is met from the lower soil layers during summer and from upper soil layers during winter season. Hence, the vertical soil moisture profile has a significant role on the ET process estimation (Ferguson et al. 2016). The current study compares the evapotranspiration estimates from both the calibration approaches. The changes in the soil moisture storage and evapotranspiration will also affect the baseflow and lateral flow component since the hydrological models are based on the water balance equation.
The current study uses an automatic baseflow filter program proposed by Arnold et al. (1995) for the baseflow separation from streamflow. The recursive digital filter technique (Nathan and McMahon 1990) used in the baseflow filter program is originally used in signal analysis and processing (Lyne and Hollick 1979). In this technique, the filtering of surface runoff (high-frequency signal) from baseflow (low-frequency signal) is analogous to filtering the high-frequency signals in signal processing. The equation for filtering is given by:
where \({q}_{t}\) is the filtered surface runoff (quick response) at the time step t,\({Q}_{t}\) is the original streamflow, \({b}_{t}\) is the base flow, and \(\beta\) is the filter parameter.
The streamflow generation in a watershed is an integrated response of all the components of the hydrological cycle. The effect of root zone soil moisture on the streamflow prediction is analysed by comparing the flow duration curve from both the calibration approaches. McMillan et al. (2011) have analysed the hydrological field data of Mahurangi catchment, New Zealand and reported that the improvement in the root zone soil moisture can improve the medium and low flow ranges of the flow duration curve. The current study considers the flow duration curve in three segments; 0–0.2 flow exceedance probability is high flow segment, 0.2–0.7 flow exceedance probability is medium flow range, and 0.7–1.0 flow exceedance probability is low flow segment (Yilmaz et al. 2008). The flow duration curve from both the calibration approaches are compared with that of the measured streamflow in the watershed outlet. Then, the effect of multivariable calibration is analysed.
Results and discussion
Calibration and validation of SWAT model
The SWAT model setup is done for LREW in the period 2006–2016. The SWAT Check analysis shows that the major hydrological component of the watershed is groundwater component. The watershed has a flat terrain with very high hydraulic conductivity. Bosch et al. (2007) reported that around 55% of the streamflow is from groundwater contribution in LREW. The calibration is conducted in two approaches, a single-variable calibration considering streamflow at the watershed outlet (Case I) and a multi-variable calibration considering both streamflow and soil moisture at the watershed outlet (Case II). The results show that objective function got converged after 2700 simulations in single-variable calibration of LREW (Fig. 3a). The best performing parameter set is selected from final ensemble simulations. The parameter set from single-variable calibration is able to simulate the streamflow by NSE value of 0.62 (Fig. 4a). The streamflow simulations in physics-based distributed hydrological models are considered acceptable, if the NSE value is greater than 0.50 or PBIAS value lies between ± 25% (Moriasi et al. 2015). However, the calibrated SWAT model overpredicts the soil moisture in single-variable calibration by VE value of 0.54 (Fig. 4b). The parameters are adjusted for better simulation of streamflow at the calibration outlet in single-variable calibration. The adjustment of the parameters SOL_AWC and SOL_K modifies the water holding capacity of each soil layer and its hydraulic conductivity. These parameter values are adjusted for better prediction of streamflow in a single-variable calibration without considering the prediction of other hydrological fluxes. In most of the single-variable calibration studies, the parameters SOL_AWC and SOL_K are converged to its minimum/maximum value specified in Table 1. The optimal value of the parameter SOL_AWC is 0.89 in the single-variable calibration with SOL_K value -0.25. The increase in water holding capacity with reduced hydraulic conductivity can increase the soil moisture storage in each soil layer. Hence, the optimal parameter set from single-variable calibration has resulted in an overprediction of soil moisture.

a Convergence of objective function in single-variable calibration b Trade-off between objective functions (NSE and VE) in multivariable calibration

Comparison of single-variable and multi-variable calibration in terms of a streamflow and b soil water storage at the watershed outlet in the calibration period
The multi-variable calibration optimizes the parameters in such a way that it can predicts both streamflow and soil moisture well. The multi-variable calibration results in a pareto set of parameters due to the significant trade-off that exists in the calibration of SWAT for streamflow and soil moisture (Fig. 3b). The best parameter set for streamflow prediction (NSE = 0.62) has a soil moisture prediction by a VE value of 0.61. Similarly, the parameter set which simulates the soil moisture well (VE = 0.85) has a poor streamflow prediction by a NSE value of 0.45. The SWAT model structure has limitations in calibrating the model for multiple hydrological fluxes. Hence, the current study considers a compromising parameter set which can reasonably simulate both streamflow and soil moisture at the calibration outlet (NSE = 0.59 and VE = 0.75). The optimal parameter sets from both the calibration approaches are presented in Table 1. There is a significant difference in the parameter values related to groundwater component, evapotranspiration and soil moisture storage. This difference in parameter values indicates that the simulation of these hydrological fluxes are different in both the calibration approaches.
The calibrated parameter sets from both the approaches are validated in the period 2014–2016. The parameter set of single-variable calibration can simulate the streamflow well in the validation period by a NSE value of 0.61 at the watershed outlet (Fig. 5a). The soil moisture prediction of single-variable calibration is an overprediction by VE value 0.51 in the validation period. The calibrated parameter set from the multivariable calibration simulates both the streamflow and soil moisture reasonably well in the validation period. The multivariable calibration simulates the streamflow at the watershed outlet by NSE value of 0.58. The corresponding soil moisture prediction is also reasonably good (VE = 0.75) (Fig. 5b). This improved prediction in the multivariable calibration may be because of the improvement in the process representation. Hence, multivariable calibration has the capability to improve the suitability of SWAT model for impact analysis studies.

Comparison of single-variable and multi-variable calibration in terms of a streamflow and b soil water storage at the watershed outlet in the validation period
Spatial prediction of streamflow and soil moisture
The better prediction of more surface and sub-surfaces hydrological fluxes indicates the improved process representation in the model. The better process representation in the model can ensure an improved spatial prediction of the hydrological variables. The streamflow and soil moisture prediction at the upstream gauged subbasins are analysed with the calibrated parameter sets (Fig. 1). The parameter set from single-variable calibration simulates the streamflow at the upstream subbasins 1 and 2 by NSE values of 0.59 and 0.62, respectively (Table 3). The corresponding soil moisture simulations are overprediction with VE values of − 0.24 and 0.14, respectively (Table 3). The parameter set from multi-variable calibration is able to give a better streamflow prediction at both the subbasins 1 and 2 by NSE values of 0.60 and 0.61, respectively. The soil moisture predictions in these subbasins are having VE value of 0.26 and 0.51, respectively. The spatial prediction of soil moisture and streamflow in the validation period are also better in the multivariable calibration compared to the single-variable parameter set (Table 3). This improved spatial prediction of parameters can enhance the capability of SWAT for ungauged basin predictions.
Effect of root zone soil moisture on the process representation of calibrated SWAT model
The soil water–plant–atmosphere interaction is one of the complex system which affects the hydrological cycle, climate, plant growth, and nutrient cycle of a watershed (Geris et al. 2017; Brocca et al. 2017; Corradini 2014; Wang et al. 2019). The soil moisture dynamics influences all the components of the hydrological cycle in a physics-based system (Wang et al. 2019; Corradini 2014); hence, an improved prediction of soil moisture may result in a better process representation in the hydrological models according to the model structure. Ajmal et al. (2016) have statistically analysed the effect of soil moisture at different depth on different hydroclimatic factors and reported a significant correlation with ET process. The effect of soil moisture on the process representation in the calibrated SWAT model is analysed in the study and presented below.
Vertical soil moisture distribution
The calibrated parameter set from the multi-variable calibration is able to make a better spatial prediction of soil moisture. The soil moisture estimate is the average soil moisture of the entire soil thickness for that particular subbasin. The soil moisture measurements at different locations in the subbasin are averaged to obtain the corresponding observed soil moisture time series. The comparison of soil moisture simulation has done on subbasin level. Previous studies reported that the improvement in the root zone soil moisture prediction can improve the simulation of other surface and subsurface hydrological fluxes in the watershed (Rajib et al. 2016; Kundu et al. 2017; Brocca et al. 2012). As per the STATSGO soil data, the soil thickness in most of the HRUs are in the range of 300 mm in LREW and the soil moisture measurements are available at 50 mm, 200 mm and 300 mm depth. The vertical soil moisture distribution will be different in different seasons. The soil moisture distribution will be uniform for all the layers in the winter season. The soil moisture in the upper layers will be less during the summer season and hence the evaporative demand of the watershed has to be obtained from lower layers (McMillan et al. 2011). The current study considers the soil moisture only up to 300 mm depth, hence fluctuations in the soil moisture with respect to the seasons are not much visible. The soil moisture distribution of two HRUs in different seasons is plotted in Fig. 6. It is observed that the soil moisture simulation from multi-variable calibration is close to the observed soil moisture values at different depths. Soil moisture prediction from the single-variable calibration results in an overprediction of soil moisture for the entire depth and the soil moisture at the lower layer of soil shows much variability from the measured values. Soil moisture at the root zone depth has significant impact on the ET process and percolation. The value of the parameters ESCO and EPCO will get adjusted according to the soil moisture storage at different layers. Each soil layer will store the water up to field capacity limit and the excess amount of water percolates to the lower layer or go as surface runoff in SWAT. Hence, the variations in the soil moisture prediction will affect the ET, percolation and groundwater component of the water balance equation in each HRU. The annual soil water storage for the watershed is presented in Fig. 7a. The annual soil water storage in the multi-variable calibration is much close to the measured soil water storage. The single-variable calibration optimizes the parameters for better prediction of streamflow at the watershed outlet and it is resulted in significant overprediction of the soil moisture.

Vertical soil moisture distribution in different HRUs

Comparison of single- and multi-variable calibration in terms of a annual soil water storage and b annual evapotranspiration simulation in the watershed
Evapotranspiration
The actual evapotranspiration of the watershed is dependent on the soil moisture, wind and different climatic factors. 50% of the evaporative demand in SWAT is met from water stored in the first 10 mm of the soil profile. The ET is modelled in such a way that the non-availability of water in the upper layer is not compensated with the water from lower layers. The non-availability of water in the upper layers will results in reduced actual evapotranspiration estimates. The parameter ESCO helps to redistribute the soil depth according to the soil water availability. The parameter set from single-variable calibration overpredicts the soil water storage. This overprediction of soil water leads to a higher estimate of actual evapotranspiration in the watershed (Fig. 7b). In multi-variable calibration, the soil water storage is less compared to the single-variable calibration. Hence, the actual evapotranspiration estimate is less in magnitude compared to single-variable calibration. The ET estimates from both the calibration approaches are different in magnitude by 160 mm in annual scale. The evapotranspiration estimate in SWAT is not only depends on the parameters ESCO and EPCO, but the parameters SOL_AWC and SOL_K are also significant for the evapotranspiration process. The measured actual evapotranspiration values are not available in the watershed; hence, an accuracy analysis of the simulated ET estimates are not possible. The actual evapotranspiration estimate from both the calibration approaches are presented in Fig. 7b.
Streamflow
The streamflow of a watershed has three components which are overland flow, surface runoff and baseflow. The major component of streamflow in LREW is baseflow (Bosch et al. 2017). The baseflow component is a slow and consistent contribution to the streamflow and hence, the improvement in the baseflow prediction will reflects in the low flow segment of flow duration curve (Yilmaz et al. 2008). It also has a significant impact on the chemical transport of nutrients through water. The baseflow separated from measured streamflow using the baseflow filter program follows the same pattern as that is observed from the field experiments in LREW. The baseflow contribution is significant during the period December to May (Bosch et al. 2017). The baseflow contribution from both the calibration approaches are under-predictions as compared to the separated baseflow from measured streamflow data for the period 2007–2010 (Fig. 8a). Thereafter, the baseflow simulations are over-predictions in both the cases. The baseflow prediction in multi-variable calibration is slightly better than the single-variable calibration in the year 2013. The calibrated groundwater parameter values are different in the multi-variable calibration compared to the single-variable calibration. However, it could not significantly improve the baseflow simulation in the current model structure of SWAT.

Comparison of single-variable and multi-variable calibration in terms of a baseflow and b surface runoff simulation in the watershed
The surface runoff generation from both the calibration approaches are analysed in the watershed. The calibrated value of the parameter CN2_f from both the calibration approaches are similar (Table 1). The major difference is in the SOL_AWC value; the water holding capacity of the soil is higher in single-variable calibration. The hydraulic conductivity of the soil layers remains the same in both the approaches. Hence, it can be concluded that the multivariable calibration over-predicts the surface runoff compared to that of single-variable calibration in SWAT. The surface runoff generation from both the calibration approaches are compared with the observed runoff generation (Fig. 8b). The baseflow separated streamflow is considered as the surface runoff in the current study. The surface runoff generation is better in single-variable calibration as compared to the multi-variable calibration. Flow duration curve of the streamflow from both the calibration approaches are presented in Fig. 9. The streamflow predictions from both the calibration approaches are underprediction in high flow range and a slight overprediction in low- and medium-flow ranges. The flow duration curve from single-variable calibration is slightly better than the multi-variable calibration. The SWAT model structure has limitations in simulating both the surface runoff and soil moisture better with the same parameter set. Similarly, improvement in the simulation of both surface runoff and baseflow together is difficult in the current SWAT model structure. In a single-variable calibration, the SWAT model can simulate the streamflow better only if the surface runoff is the predominant component of streamflow. If the baseflow contribution is significant in the streamflow, a multi-variable calibration will be ideal and it can improve the simulation in the low- and medium-flow ranges.

Streamflow prediction in various flow ranges at the watershed outlet
Correspondence between the physically interpretable SWAT model parameters
The current analysis on different water balance components shows that root zone soil moisture has a significant role to play in simulating the different components of the hydrological cycle in SWAT model. The parameters SOL_AWC and SOL_ K are key parameters that can influence all the surface and sub-surface hydrological processes. The parameters SOL_AWC and SOL_K are HRU level parameters and hence, the percentage deviations from the default values are optimized in a calibration process. These parameter variations are treated as independent while calibrating the SWAT model. However, the water holding capacity and hydraulic conductivity are two characteristics of the soil layer based on its texture. The current study observed a relation between the variations of the parameters CN2_f, SOL_AWC, and SOL_K in the ensemble parameter sets from multi-variable calibration. A positive correlation is observed between the parameter variations of CN2_f and SOL_AWC (Fig. 10). Similarly, the variations of the parameter SOL_K is negatively correlated to the parameter variations SOL_AWC and CN2_f. A positive deviation for CN2_f indicates an increase in runoff generation from each HRU. The increase in runoff results in a decrease in infiltration and percolation losses. The decrease in these variables is accounted for in the model by the parameter SOL_K. Hence, the positive deviation of CN2_f logically matches with the negative deviation for the parameter SOL_K. Similarly, a negative variation for SOL_K indicates an increase in the water holding capacity of the soil and that corresponds to a positive variation for parameter SOL_AWC. Even though these parameters are independent physical variables, a calibration process that can preserve these correlations will be able to represent the hydrological processes of a watershed better. This may help reduce the trade-off that exists in the SWAT model structure to calibrate both surface runoff and soil moisture together.

Dependence between the parameter variations in the ensemble parameter sets from multi-variable calibration
Conclusion
The physics-based distributed hydrological models are widely used for solving environmental issues. The calibration process is a vital task in the application of physics-based distributed hydrological models. The streamflow measurement at the watershed outlet is considered as an integrated response of the watershed; hence, it is commonly used for calibration of the hydrological models. The soil moisture is an important variable which affect other hydrological processes since most of the physics-based distributed hydrological models work on water balance equation. The current study analyses the potential of root zone soil moisture for improving the process representation in SWAT model through the calibration process. The analysis is done by comparing the single-variable calibration in SWAT using streamflow at the watershed outlet and the multi-variable calibration using both streamflow and soil moisture in the watershed outlet. It is observed that the single-variable calibration is able to simulate the streamflow well at the calibration outlet by NSE value of 0.62. The trade-off exist in the calibration of SWAT is resulted in poor prediction of soil moisture by VE value of 0.54. The parameters SOL_AWC and SOL_K are the key parameters which affect both the processes. The compromising parameter set of multi-variable calibration simulates both the fluxes reasonably well (NSE = 0.59 and VE = 0.75). There is an improved spatial prediction of streamflow and soil moisture in multi-variable calibration compared to the single-variable calibration.
The vertical soil moisture distribution from the multi-variable calibration is close to the observed soil moisture measurements at different depths. The soil moisture prediction from single-variable calibration is an overprediction. The improvement in the root zone moisture prediction in multivariable calibration influences the prediction of other hydrological fluxes. The change in the soil moisture storage has influenced the ET estimate from both the calibration approaches. The watershed considered in this study has significant groundwater contribution to the streamflow. The multi-variable calibration simulates the groundwater contribution slightly better than the single-variable calibration. However, the improved root zone soil moisture simulation in SWAT is not capable to bring significant improvement in the baseflow simulation in the current model structure. The trade-off in the calibration of SWAT for surface runoff and soil moisture has resulted in an overestimation of surface runoff in multi-variable calibration. Hence, the multi-variable calibration cannot bring improvement in the simulation of streamflow. The ensemble parameter sets from the multi-variable calibration has shown some dependence between the variations of the parameters SOL_AWC, SOL_K and CN2_f. The dependence/correlation observed in the parameter variations satisfies the physics of surface runoff generation. A single-variable calibration approach which considers this parameter dependence will be able to simulate the hydrological fluxes similar to that in multi-variable calibration.
Data availability
The study used open source data from different sources.
References
Abbaspour KC, Faramarzi M, Ghasemi SS, Yang H (2009) Assessing the impact of climate change on water resources in Iran. Water Resour Res 45(10):1–16. https://doi.org/10.1029/2008WR007615
Abbaspour KC, Rouholahnejad E, Vaghefi S, Srinivasan R, Yang H, Kløve B (2015) A continental-scale hydrology and water quality model for Europe: calibration and uncertainty of a high-resolution large-scale SWAT model. J Hydrol 524:733–752. https://doi.org/10.1016/j.jhydrol.2015.03.027
Adab H, Morbidelli R, Saltalippi C, Moradian M, Ghalhari GAF (2020) Machine learning to estimate surface soil moisture from remote sensing data. Water 12(11):3223
Adeyemi O, Grove I, Peets S, Domun Y, Norton T (2018) Dynamic neural network modelling of soil moisture content for predictive irrigation scheduling. Sensors 18(10):3408
Ajmal M, Waseem M, Ahmad W, Kim TW (2016) Soil moisture dynamics with hydro-climatological parameters at different soil depths. Environ Earth Sci 75(2):133
Al-Mukhtar M (2016) Modelling the root zone soil moisture using artificial neural networks, a case study. Environ Earth Sci 75(15):1–12
Anderton SP, White SM, Alvera B (2002) Micro-scale spatial variability and the timing of snow melt runoff in a high mountain catchment. J Hydrol 268(1–4):158–176. https://doi.org/10.1016/S0022-1694(02)00179-8
Arnold JG, Allen PM, Muttiah R, Bernhardt G (1995) Automated base flow seperation and recession techniques. Ground Water 33:1010–1018
Arnold JG, Moriasi DN, Gassman PW, Abbaspour KC, White MJ, Griensven V, Liew V (2012) Digitals@University of Nebraska-Lincoln SWAT: model use, calibration, and validation. Biol Syst Eng: Papers Publ. 10(13031/2013):42263
Arnold JG, Youssef MA, Yen H, White MJ, Sheshukov AY, Sadeghi AM et al (2015) Hydrological processes and model representation: impact of soft data on calibration. Trans ASABE 58(6):1637–1660. https://doi.org/10.13031/trans.58.10726
Athira P, Sudheer KP, Cibin R, Chaubey I (2016) Predictions in ungauged basins: an approach for regionalization of hydrological models considering the probability distribution of model parameters. Stoch Env Res Risk Assess 30(4):1131–1149. https://doi.org/10.1007/s00477-015-1190-6
Bekele EG, Nicklow JW (2007) Multi-objective automatic calibration of SWAT using NSGA-II. J Hydrol 341(3–4):165–176. https://doi.org/10.1016/j.jhydrol.2007.05.014
Beven K, Binley A (1992) The future of distributed models: model calibration and uncertainty prediction. Hydrol Process 6(3):279–298. https://doi.org/10.1002/hyp.3360060305
Beven KJ, O’Connell PE (1982) On the role of physically-based distributed modelling in hydrology.
Bosch DD, Sheridan, JM, Lowrance RR, Hubbard RK, Strickland TC, Feyereisen GW, Sullivan DG (2007) Little river experimental watershed database. Water Resour Res 43(9)
Bosch DD, Arnold JG, Allen PG, Lim KJ, Park YS (2017) Temporal variations in baseflow for the Little River experimental watershed in South Georgia, USA. J Hydrol: Regional Stud 10:110–121. https://doi.org/10.1016/j.ejrh.2017.02.002
Brocca L, Moramarco T, Melone F, Wagner W, Hasenauer S, Hahn S (2012) Assimilation of surface- and root-zone ASCAT soil moisture products into rainfall-runoff modeling. IEEE Trans Geosci Remote Sens 50(7 PART1):2542–2555. https://doi.org/10.1109/TGRS.2011.2177468
Brocca L, Ciabatta L, Massari C, Camici S, Tarpanelli A (2017) Soil moisture for hydrological applications: open questions and new opportunities. Water 9(2):140
Cai Y, Zheng W, Zhang X, Zhangzhong L, Xue X (2019) Research on soil moisture prediction model based on deep learning. PLoS ONE 14(4):e0214508
Cammalleri C, Micale F, Vogt J (2016) A novel soil moisture-based drought severity index (DSI) combining water deficit magnitude and frequency. Hydrol Process 30(2):289–301
Cao W, Bowden WB, Davie T, Fenemor A (2006) Multi-variable and multi-site calibration and validation of SWAT in a large mountainous catchment with high spatial variability. Hydrol Process 20(5):1057–1073. https://doi.org/10.1002/hyp.5933
Chen F, Crow WT, Starks PJ, Moriasi DN (2011) Improving hydrologic predictions of a catchment model via assimilation of surface soil moisture. Adv Water Resour 34(4):526–536. https://doi.org/10.1016/j.advwatres.2011.01.011
Corradini C (2014) Soil moisture in the development of hydrological processes and its determination at different spatial scales. J Hydrol (amsterdam) 516:1–5
Dirmeyer PA, Zeng FJ, Ducharne A, Morrill JC, Koster RD (2000) The sensitivity of surface fluxes to soil water content in three land surface schemes. J Hydrometeorol 1(2):121–134
Ferguson IM, Jefferson JL, Maxwell RM, Kollet SJ (2016) Effects of root water uptake formulation on simulated water and energy budgets at local and basin scales. Environ Earth Sci 75(4):316
Feyereisen GW, Strickland TC, Bosch DD, Sullivan DG (2007) Evaluation of SWAT manual calibration and input parameter sensitivity in the little river watershed. Trans ASABE 50(3):843–855
Gassman PW, Reyes MR, Green CH, Arnold JG (2007) The soil and water assessment tool: historical development, applications, and future research directions. Trans ASABE 50(4):1211–1250
Geris J, Tetzlaff D, McDonnell JJ, Soulsby C (2017) Spatial and temporal patterns of soil water storage and vegetation water use in humid northern catchments. Sci Total Environ 595:486–493
Grillakis MG, Koutroulis AG, Komma J, Tsanis IK, Wagner W, Blöschl G (2016) Initial soil moisture effects on flash flood generation—a comparison between basins of contrasting hydro-climatic conditions. J Hydrol 541:206–217
Gupta HV, Sorooshian S, Yapo PO (1998) Toward improved calibration of hydrologic models: multiple and noncommensurable measures of information. Water Resour Res 34(4):751–763. https://doi.org/10.1029/97WR03495
Guse B, Reusser DE, Fohrer N (2014) How to improve the representation of hydrological processes in SWAT for a lowland catchment—temporal analysis of parameter sensitivity and model performance. Hydrol Process 28(4):2651–2670. https://doi.org/10.1002/hyp.9777
Heathman GC, Starks PJ, Ahuja LR, Jackson TJ (2003) Assimilation of surface soil moisture to estimate profile soil water content. J Hydrol 279(1–4):1–17
Her Y, Cibin R, Chaubey I (2015) Application of parallel computing methods for improving efficiency of optimization in hydrologic and water quality modeling. Appl Eng Agric 31(3):455–468. https://doi.org/10.13031/aea.31.10905
Herman MR, Nejadhashemi AP, Abouali M, Hernandez-Suarez JS, Daneshvar F, Zhang Z et al (2018) Evaluating the role of evapotranspiration remote sensing data in improving hydrological modeling predictability. J Hydrol 556:39–49. https://doi.org/10.1016/j.jhydrol.2017.11.009
Immerzeel WW, Droogers P (2008) Calibration of a distributed hydrological model based on satellite evapotranspiration. J Hydrol 349(3–4):411–424. https://doi.org/10.1016/j.jhydrol.2007.11.017
Kundu D, Vervoort RW, van Ogtrop FF (2017) The value of remotely sensed surface soil moisture for model calibration using SWAT. Hydrol Process 31(15):2764–2780. https://doi.org/10.1002/hyp.11219
McMillan HK, Clark MP, Bowden WB, Duncan M, Woods RA (2011) Hydrological field data from a modeller’s perspective: part 1. Diagnostic tests for model structure. Hydrol Process 25(4):511–522. https://doi.org/10.1002/hyp.7841
Moriasi DN, Arnold JG, Van Liew MW, Bingner RL, Harmel RD, Veith TL (2007) Model evaluation guidelines for systematic quantification of accuracy in watershed simulations. Trans ASABE 50(3):885–900
Moriasi DN, Gitau MW, Pai N, Daggupati P (2015) Hydrologic and water quality models: performance measures and evaluation criteria. Trans ASABE 58(6):1763–1785. https://doi.org/10.13031/trans.58.10715
Muleta M (2011) Improving model performance using dynamic evaluation and proper objective function. World Environmental and Water Resources Congress 2011: Bearing Knowledge for Sustainability—Proceedings of the 2011 World Environmental and Water Resources Congress, (1): 2820–2829. https://doi.org/10.1061/41173(414)294
Nathan RJ, McMahon TA (1990) Evaluation of automated techniques for base flow and recession analyses. Water Resour Res 26(7):1465–1473. https://doi.org/10.1029/WR026i007p01465
Nkiaka E, Nawaz NR, Lovett JC (2018) Effect of single and multi-site calibration techniques on hydrological model performance, parameter estimation and predictive uncertainty: a case study in the Logone catchment, Lake Chad basin. Stoch Environ Res Risk Assess 32(6):1665–1682. https://doi.org/10.1007/s00477-017-1466-0
Parajka J, Naeimi V, Blöschl G, Wagner W, Merz R, Scipal K (2006) Assimilating scatterometer soil moisture data into conceptual hydrologic models at the regional scale. Hydrol Earth Syst Sci 10(3):353–368
Penna D, Tromp-van Meerveld HJ, Gobbi A, Borga M, Dalla Fontana G (2011) The influence of soil moisture on threshold runoff generation processes in an alpine headwater catchment. Hydrol Earth Syst Sci 13(3):689–702
Rajib MA, Merwade V, Yu Z (2016) Multi-objective calibration of a hydrologic model using spatially distributed remotely sensed/in-situ soil moisture. J Hydrol 536:192–207. https://doi.org/10.1016/j.jhydrol.2016.02.037
Sahoo AK, Houser PR, Ferguson C, Wood EF, Dirmeyer PA, Kafatos M (2008) Evaluation of AMSR-E soil moisture results using the in-situ data over the Little River Experimental Watershed. Georgia Remote Sens Environ 112(6):3142–3152. https://doi.org/10.1016/j.rse.2008.03.007
Sharma V, Swayne DA, Lam D, Schertzer W (2006a) Parallel shuffled complex evolution algorithm for calibration of hydrological models. 20th International Symposium on High-Performance Computing in an Advanced Collaborative Environment, 2006. HPCS 2006, 30. https://doi.org/10.1109/HPCS.2006.34
Sharma V, Swayne D, Lam D, Schertzer W (2006b) Auto-calibration of hydrological models using high performance computing. Proceedings of the IEMSs 3rd Biennial Meeting, Summit on Environmental Modelling and Software
Sheridan JM (1997) Rainfall-streamflow relations for coastal plain watersheds. Appl Eng Agric 13(3):333–344
Shi Y, Baldwin DC, Davis KJ, Yu X, Duffy CJ, Lin H (2015) Simulating high-resolution soil moisture patterns in the Shale Hills watershed using a land surface hydrologic model. Hydrol Process 29(21):4624–4637
Tobin KJ, Bennett ME (2017) Constraining SWAT calibration with remotely sensed evapotranspiration data. J Am Water Resour Assoc 53(3):593–604. https://doi.org/10.1111/1752-1688.12516
Vema VK, Sudheer KP (2020) Towards quick parameter estimation of hydrological models with large number of computational units. J Hydrol 587:124983
Vivoni ER, Moreno HA, Mascaro G, Rodriguez JC, Watts CJ, Garatuza-Payan J, Scott RL (2008) Observed relation between evapotranspiration and soil moisture in the North American monsoon region. Geophy Res Lett. https://doi.org/10.1029/2008GL036001
Wanders N, Bierkens MFP, de Jong SM, de Roo A, Karssenberg D (2014a) The benefits of using remotely sensed soil moisture in parameter identification of large-scale hydrological models. Water Resour Res 50(8):6874–6891. https://doi.org/10.1002/2013WR014639
Wanders N, Karssenberg D, Roo AD, De Jong SM, Bierkens MFP (2014b) The suitability of remotely sensed soil moisture for improving operational flood forecasting. Hydrol Earth Syst Sci 18(6):2343–2357
Wang C, Fu B, Zhang L, Xu Z (2019) Soil moisture–plant interactions: an ecohydrological review. J Soils Sediments 19(1):1–9
Yilmaz KK, Gupta HV, Wagener T (2008) A process-based diagnostic approach to model evaluation: application to the NWS distributed hydrologic model. Water Resour Res 44(9):1–18. https://doi.org/10.1029/2007WR006716
Zhang WM, Dong ZC, Zhu CT, Qian W (2008a) Automatic calibration of hydrologic model based on multi-objective particle swarm optimization method. J Hydraul Eng 39(5):528–534
Zhang X, Srinivasan R, Van Liew M (2008b) Multi-site calibration of the SWAT model for hydrologic modeling. Trans ASABE 51(6):2039–2049. https://doi.org/10.13031/2013.25407
Zhang X, Srinivasan R, Zhao K, Liew MV (2009) Evaluation of global optimization algorithms for parameter calibration of a computationally intensive hydrologic model. Hydrol Process: Int J 23(3):430–441
Zhang X, Srinivasan R, Arnold J, Izaurralde RC, Bosch D (2011) Simultaneous calibration of surface flow and baseflow simulations: a revisit of the SWAT model calibration framework. Hydrol Process 25(14):2313–2320. https://doi.org/10.1002/hyp.8058
Zhao N, Yu F, Li C, Zhang L, Liu J, Mu W, Wang H (2015) Soil moisture dynamics and effects on runoff generation at small hillslope scale. J Hydrol Eng 20(7):05014024
Funding
There is no funding agency for this study.
Author information
Authors and Affiliations
Contributions
Rajat Choudhary: conceptualization, methodology, software, writing—original draft preparation. PA: resources, supervision, writing—reviewing and editing.
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this paper.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Choudhary, R., Athira, P. Effect of root zone soil moisture on the SWAT model simulation of surface and subsurface hydrological fluxes. Environ Earth Sci 80, 620 (2021). https://doi.org/10.1007/s12665-021-09912-z
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s12665-021-09912-z