
Abstract
The present article motivates great interests on the constitutive modeling of thermoelastic coupling behavior in a transversely isotropic thick plate in the context of a new theory of ultrafast heating condition, known as Moore–Gibson–Thompson (MGT) theory. Corresponding to this new theory, the heat transport law is formulated in an integral form of a common derivative within a slipping interval by assimilating the memory-dependent heat transfer. Upper surface of the plate is stress-free subjected to prescribed surface temperature, whereas the lower surface rests in a rigid foundation and is thermally insulated and under the action of the gravitational field. Applying the Laplace–Fourier transforms successively, the solutions of the governing equations have been achieved in the transformed domain and the corresponding solutions in the space-time domain have been obtained using suitable numerical technique based on the expansion of Fourier series. According to the graphical representations corresponding to the numerical results, conclusions about the new theory are constructed. Excellent predictive capability is demonstrated due to the presence of memory-dependent derivative, gravitational field and kernel functions. A comparative study between isotropic and transversely isotropic material is also demonstrated.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
During the last decades, extensive research works have been carried out indicating the applications of classical Fourier’s law of heat conduction in the problems which involves large spatial dimensions and long-time behavior. However, the classical form of Fourier’s law predicts unsatisfactory outcomes in the problems incorporating short time behavior, high heat flux and extreme thermal gradients. From the theoretical point of view, the infinite velocity of heat wave propagation by Fourier’s law also leads to physically unacceptable situation in the heat transfer problems. As a consequence, serious attention has been given to the development of different generalized heat conduction models which admit the finite speed of thermal waves.
One of the so-called generalized theories, the Moore–Gibson–Thompson (MGT) theory of generalized thermoelasticity arises from the modeling of high amplitude sound waves. Nowadays, this new theory has received a major interest in recent years from the researchers and as an outcome, several research articles have been published for understanding it. This theory actually originated from the fluid mechanics [1]. Various remarkable works can be notified in this field due to the wide range of applications of the theory such as the industrial usage and medical usage in the case of high-intensity ultrasound in lithotripsy, thermotherapy, ultrasound cleaning, etc. [2,3,4].
The classical theory of heat conduction based on the Fourier law jointly with the energy equation arrives at
where \(q_i\) denotes the component of the heat flux vector, \(\theta\) is the temperature field and c is the temperature capacity [5, 6].
Clearly, the above law predicts the instantaneous propagation of the thermal waves. This fact contradicts the causality principle. However, some alternative equations for the heat conduction have now been proposed by the Scientists. Among the proposed theories, the well-known theory proposed by Maxwell and Cattaneo [7], in which, the Fourier law has been changed by a constitutive equation which involves a relaxation parameter in the following form
where k denotes the thermal conductivity of the material and \(\tau_0 \, (>0)\) is the relaxation time. In the above equation, dot denotes the derivative with respect to time whereas comma and subscript signifies the spatial derivative with respect to the corresponding variable. Using Eqs. (1) and (2), the damped hyperbolic equation can be derived. Corresponding to the hyperbolic equation, the thermal wave propagates with a finite speed. In recent years, many research have been reported which have been contributed to develop a series of celebrated non-classical thermoelasticity theories based on the hyperbolic Lord–Shulman (LS) theory [8]. During the last decades, another development was by Green and Naghdi (GN) [9,10,11], in which three new alternative theories for heat conduction based on a rational technique were proposed, named as type I, II and III, respectively. The linearized version of the type I theory agrees with the classical Fourier’s law. The theory proposed in Type II drives to another hyperbolic equation for heat conduction. In this case, there is no dissipation and the flux vector is obtained as a linear expression of the thermal displacement.
where \(K^\star\) is the conductivity rate parameter. The thermoelasticity theory for type III theory is described by the constitutive equation
where K and \(K^\star\) are both positive. The adjoining of Eq. (3) together with Eq. (1) provides another generalization of the classical Fourier law. The exponential decay of solutions has been obtained in this situation. However, this theory has the same drawback as the usual Fourier theory and it also predicts the instantaneous propagation of thermal waves. Again, the causality principle is not satisfied. Therefore, it is also natural to modify this proposition introducing a relaxation time parameter in the constitutive equation to overcome this problem. In order to do this, the further modification was done as [12]
Nowadays, this theory is widely applicable in the heat transfer problems in the field of Engineering sciences. Recently, Abouelregal et al. [13] considered a problem of an infinite magneto-thermoelastic solid subjected to periodically dispersed with varying heat flow based on nonlocal Moore–Gibson–Thompson theory. Also, Sur [14] studied the nonlocal elasto-thermodiffusive interaction for an infinite body with a spherical cavity based on MGT theory.
The nonlocal characteristics of well-known fractional differential equations are mostly useful in this and other applications. The integer-order differential operator is well-known to be a local operator, while the fractional-order differential operator is nonlocal [15]. Recently, Wang and Li [16] investigated a new definition of the derivative named as “memory-dependent derivative” (MDD) by modifying the conventional fractional-order derivative. This new form of derivative is found to be able to capture the realistic outcomes of real-life problems as much as possible because its definition is based on the integration of the function in the slipping interval where the minimum interval is very close to the upper bound and it is also found that recent data is required to predict the realistic outcomes of the problems. Incorporating memory-dependent derivatives in thermoelasticity has attracted the attention of many investigators in recent years, and it is also fashionable [17,18,19].
The well-known memory-dependent derivative [16] of the first order of function f is simply defined in an integral form of a common derivative with a kernel function on a slipping interval as follows:
where \(\omega \,(>0)\) is the delay time and \(K(t-\xi )\) is the kernel function which can be chosen freely in different linear and nonlinear forms, such as \(K(t-\xi )=1\), \(1-\frac{t-\xi }{\omega }\), \(1-(t-\xi )\) and \(\left( 1-\frac{t-\xi }{\omega }\right) ^2\). The kernel function can be understood as the degree of the past effect on the present. In addition, if \(K(t-\xi )\equiv 1\),
Therefore, it might be concluded that the common derivative \(\frac{d}{dt}\) can be represented as the limit of \(D_\omega\) as \(\omega \rightarrow 0\).
The right side of Eq. (6) can be understood as mean value of \(f'(\xi )\) on the past interval \([t-\omega , t]\) with different weights. Generally, from the viewpoint of applications, the memory effect requires weight \(0\leqslant K(t-\xi )<1\) for \(\xi \in [t-\omega , t)\), so the magnitude of the memory-dependent derivative is usually smaller than that of the common derivative \(f'(t)\) [20, 21]. The variational principles, reciprocal theorems and uniqueness of solutions due to memory dependence in a thermodiffusive medium have been proven by El-Karamany and Ezzat [22].
Therefore, following the definition outlined in Eq. (6), the constitutive law for the heat flux under memory-dependent Moore–Gibson–Thompson (MGT) theory is given by
where \(\omega\) is the delay time and \(\tau_0\) is the relaxation time for MGT theory.
As per the knowledge of author, it is difficult to find out the thermoelastic interaction in a thick plate in the presence of a heat source. However, in order to study some practical relevant problems, particularly in heat transfer problems involving very short time intervals and in the problems of very high heat fluxes, where the lagging behavior in the heat conduction is considered as the elapsed times during a transient process are very small, say about \(10^{-7}\), it is advantageous to implement the Moore–Gibson–Thompson (MGT) theory. With this motivation in mind, the present contribution mainly focuses on the study of the thermoelastic interactions in a transversely isotropic thick plate due to the influence of gravitational field. The heat transport law is formulated in the context of memory-dependent generalized Moore–Gibson–Thompson theory in the presence of heat source. The upper surface of the plate is stress-free and is subjected to a prescribed surface temperature, whereas the lower surface is laid down on a rigid foundation and is thermally insulated. The governing equations are solved in Laplace and Fourier transforms domain on applying suitable integral transforms. The inversions of double transform has been carried out numerically using a method based on Fourier series expansion technique [23], as mentioned in Appendix. Numerical computation have been done for Magnesium (Mg) and the computed results have been depicted graphically to show the significant effects of different linear and nonlinear kernel functions in the heat equation. Moreover, it is noticed that how the second degree term of delay-time parameter influences the heat conduction involving nonlinear kernel function compared to different linear kernels chosen. Excellent predictive capability is demonstrated due to the influence of the gravitational field and the delay-time parameter also.
2 Formulation of the problem
Consider an infinite transversely isotropic thick plate with spatially varying heat source at an uniform reference temperature \(T_0\) in the undisturbed state. The upper surface of this medium is taken traction-free and subjected to a known temperature distribution applied with the band of width 2l \((-l \leqslant y \leqslant l)\). The lower surface of the plate is laid down on a rigid foundation and is thermally insulated. Here, g is the acceleration due to gravity which acts vertically downward along the x-axis. Let the faces of the plate be the planes \(x=\pm h\), referred to a rectangular set of Cartesian coordinates axes Ox, Oy and Oz as shown in Fig. 1.

Geometry of the problem
For the present problem, two-dimensional deformation of the plate parallel to xy-plane is considered. Therefore, it can be assumed that all the field quantities are dependent only on the space coordinates \(x, \; y\) and the time t. Therefore, for the current problem, the displacement vector \(\vec {u}\) and the temperature field T are given by
The strain–displacement relationship in the present problem is given by
The constitutive relations for the present problem are
where \(\sigma _{ij}\) \((i,\; j=x,y)\) are the stress components, \(\beta _1\) is the thermal modulus and \(c_{11}\), \(c_{12}\), \(c_{22}\) are the elastic constants.
The equations of motion along x- and y-directions under the action of gravitational effect can be obtained as
The heat conduction equation in the context of memory-dependent MGT theory is given by
However, the laws of heat conduction in the context of memory-dependent MGT theory are given by
where \(\rho\) is the density of the plate, K is the thermal conductivity of the plate, \(K^\star\) being the conductivity rate parameter, \(c_\nu\) is the specific heat at constant strain, Q is the intensity of the applied heat source per unit mass and \(\tau _0\) is the relaxation time.
Introducing the following nondimensional variables
and, after omitting primes, the above equations have been rewritten in nondimensional form as follows:
where
The above equations are to be solved subjected to the initial conditions
The boundary conditions for the problem may be taken as
In the first equation of (23), \(\theta _0\) and \(\varkappa\) are constants, while H(.) is the Heaviside unit step function. Thus, the surface \(x=h\) is traction-free and it is heated on a band of width \(2\varkappa\) around the \(y-\)axis on the upper surface, while the rest of the surface is kept at zero temperature.
The kernel function \(K(t-\xi )\) can be chosen freely as [24,25,26,27]
where \(\omega\) is the time-delay parameter and e, f are constants.
Employing the Laplace and the Fourier transforms successively to the function f(x, y, t), defined by
subjected to the operational relationship
Therefore, applying Laplace–Fourier double transform to Eqs. (16)–(21) yields
Eliminating \(\hat{{\bar{u}}}\) and \(\hat{{\bar{\theta }}}\) from Eqs. (29)–(31) yields
In a similar fashion, eliminating \(\hat{{\bar{u}}}\) and \(\hat{{\bar{v}}}\) between equations (29)–(31) yields
where
3 Spatially varying heat source
The heat source Q(x, y, t) is defined in the following form
in which a and b are constants.
On applying the Laplace–Fourier transforms, the expression of the heat source takes the form
Thus, the expressions if G(x, q, p) and H(x, q, p) are given by
Therefore, the solutions of Eqs. (34) and (35) can be obtained as
respectively, where
where \(k_j\) and \(-k_j\)’s \((j=1, 2, 3)\) indicates the roots of the equation
Substituting the expressions of \(\hat{{\bar{v}}}\) and \(\hat{{\bar{\theta }}}\) in (29), the corresponding equation reduces to
where \(k_4=\sqrt{p^2+\omega _1q^2}\). Therefore, the solutions for \(\hat{{\bar{u}}}\), \(\hat{{\bar{v}}}\) and \(\hat{{\bar{\theta }}}\) compatible with Eq. (30) can be obtained as
where
The stress components can be represented from Eqs. (26)–(28) as
The boundary conditions in the Laplace–Fourier double transform domain take the form
On using the boundary conditions (47), Eqs. (44)–(46) yield
The solution of the above system of equation gives the unknown parameters \(A_j(q,p)\) and \(A_{-j}(q,p) \, j=1 (1) 3.\)
The results for an isotropic material can be deduced from the present analysis by simply substituting \(\omega _1=\lambda /(\lambda +2\mu )\), \(\omega _2=(\lambda +\mu )/(\lambda +2\mu )\) and \(\epsilon =\gamma ^2T_0/(\rho c_\nu (\lambda +2\mu ))\), where \(\gamma =(3\lambda +2\mu )\alpha _t\), where \(\lambda\), \(\mu\) are Lame’s constants, \(\rho\) is the density of the medium, \(c_\nu\) is the specific heat at constant strain and \(\alpha _t\) is the coefficient of linear thermal expansion of the material. Also, it can be verified that all the results corresponding to the absence of gravitational field for GN III model agree with the results of the existing literature [28].
4 Numerical results and discussions
In order to study the influence of the gravitational field, the effect of the time-delay parameter and the significance of different kernel functions in the heat transport law, the analytical results have been depicted in the real space-time domain in the form of the respective graphical representations. The material constants used for the numerical computations are as follows [29]:
Also, the material properties for isotropic material (Cu) are given as follows [30]:
In order to get the roots of the polynomial equation (38) in the complex domain, the Laguerre’s method has been implemented. For the purpose of illustration, the value of the additional material constant is taken to be \(K^\star =7\) [28]. Moreover, the phase lag parameters and the additional material constants satisfy the stability condition for MGT heat conduction, that the solution will be exponentially stable if \(c>0\), \(\tau _0>0\), \(K>0\), \(K^\star >0\) and \(K>K^\star \tau_0\) is satisfied [12].
In order to study the effect of different linear and nonlinear kernel functions in MGT heat conduction law due to the influence of gravitational field, Figs. 2, 3, 4, 5 and 6 are illustrated. For these numerical computations, the magnesium material is considered. The numerical computations are performed for time \(t=0.25\) on \(y=0\) plane. The relaxation time and the time-delay parameters are taken to be \(\tau _0=0.2\) and \(\omega =0.01\). The kernel functions have been considered as \(K(t-\xi )=1\), \(1-\frac{t-\xi }{\omega }\), \(1-(t-\xi )\) and \(\left( 1-\frac{t-\xi }{\omega }\right) ^2\) , respectively.

u vs. x for \(t=0.25\), \(y=0\) and \(g=9.8\) for different kernel functions

v vs. x for \(t=0.25\), \(y=0\) and \(g=9.8\) for different kernel functions

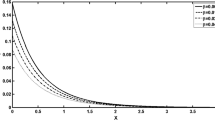
\(\theta\) vs. x for \(t=0.25\), \(y=0\) and \(g=9.8\) for different kernel functions

\(\sigma _{xx}\) vs. x for \(t=0.25\), \(y=0\) and \(g=9.8\) for different kernel functions

\(\sigma _{xy}\) vs. x for \(t=0.25\), \(y=0\) and \(g=9.8\) for different kernel functions
Figure 2 depicts the variation of the horizontal displacement u against the thickness x for different kernel functions in the heat conduction law. It is seen that u vanishes on the rigid base, satisfying the boundary condition of the problem as laid down in equation (23). Further, the displacement component u is seen to be attaining maximum magnitude on the upper surface which supports the physical fact. Also, an oscillatory nature for the magnitude of u is seen for the nonlinear kernel function \(\left( 1-\frac{t-\xi }{\omega }\right) ^2\) compared to the other linear forms of kernel functions considered. On the upper boundary of the plate, magnitude of the peak of oscillation of the displacement is maximum for \(K(t-\xi )=1\), compared to \(1-\frac{t-\xi }{\omega }\) than \(1-(t-\xi )\) than that of \(\left( 1-\frac{t-\xi }{\omega }\right) ^2\).
Figure 3 displays the variation of the vertical displacement v versus the thickness x for the same choices of the kernels. The boundary condition is also satisfied for different kernel functions as seen from the graphical representation, which partially validates the numerical codes prepared for the problem. Moreover, it is seen that on the upper boundary of the plate, the magnitude of v is maximum for the nonlinear kernel function compared to the linear kernel functions.
Figure 4 displays the variation of the temperature profile \(\theta\) versus the thickness x of the plate for the magnesium material. Since the lower surface of the plate is thermally insulated and has been kept on a rigid foundation, the maximum magnitude of the temperature is reflected from there. Moreover, on the upper boundary, the temperature satisfies the thermal boundary condition of the problem as laid down in Eq. (23). An oscillatory nature in the magnitude of \(\theta\) is seen near \(x=-0.5\) due to the reflection of thermal waves from there. Further, it is seen that the magnitude of oscillation of \(\theta\) is larger for \(K(t-\xi )=1\), compared to \(1-\frac{t-\xi }{\omega }\) than \(1-(t-\xi )\) than that of \(\left( 1-\frac{t-\xi }{\omega }\right) ^2\).
Figures 5 and 6 depict the variations of the stress components \(\sigma _{xx}\) and \(\sigma _{xy}\) for different kernel functions as mentioned earlier. As noticed from these figures, the stress components satisfy the mechanical boundary condition of the problem, which validates the numerical codes prepared for the computation purpose. Also, it is seen that the effect of linear kernels in the heat transport law influences the stress components more compared to the nonlinear kernel function. Since the upper surface of the plate is assumed to be stress-free, the respective figures also justify the qualitative behavior and the wave nature is seen near the lower boundary, which is quite plausible.
In order to discuss the effect of gravitational field on the thermophysical quantities of the transversely isotropic plate, Figs. 7, 8, 9, 10 and 11 are depicted. These graphical representations have been displayed at time \(t=0.25\) for kernel \(1-\frac{t-\xi }{\omega }\) at depth \(y=0\). The relaxation time and the time-delay parameters are taken to be \(\tau _0=0.2\) and \(\omega =0.01\). From the figures, it is seen that the presence of the gravitational field has the tendency to diminish the magnitude of the profiles of the thermophysical quantities.

u vs. x for \(t=0.25\), \(y=0\) and \(K(t-\xi )=1-\frac{t-\xi }{\omega }\)

v vs. x for \(t=0.25\), \(y=0\) and \(K(t-\xi )=1-\frac{t-\xi }{\omega }\)

\(\theta\) vs. x for \(t=0.25\), \(y=0\) and \(K(t-\xi )=1-\frac{t-\xi }{\omega }\)

\(\sigma _{xx}\) vs. x for \(t=0.25\), \(y=0\) and \(K(t-\xi )=1-\frac{t-\xi }{\omega }\)

\(\sigma _{xy}\) vs. x for \(t=0.25\), \(y=0\) and \(K(t-\xi )=1-\frac{t-\xi }{\omega }\)
Figures 12 and 13 are plotted to show the variation of the temperature \(\theta\) and normal stress \(\sigma _{xx}\) against the thickness x at \(y=0\) for kernel function \(K(t-\xi )=1\) in the absence of gravitational field \((g=0)\) to make a comparison of the results obtained in case of an isotropic material (Cu). Though the qualitative behavior of the graphical representations remains the same, significant differences are also noticed. The stress profile attains a larger magnitude for transversely isotropic material compared to an isotropic material. Also, the peak of oscillation of the thermal waves attains a larger magnitude for an isotropic material and the temperature disappears within the plate for \(-0.3<x<0.15\).

\(\theta\) vs. x for \(t=0.25\), \(y=0\), \(g=0\) and \(K(t-\xi )=1\)

\(\sigma _{xx}\) vs. x for \(t=0.25\), \(y=0\), \(g=0\) and \(K(t-\xi )=1\)
5 Conclusions
In the present analysis, a new thermoelastic theory has been developed where the heat conduction is described by the Moore–Gibson–Thompson (MGT) theory under the light of memory-dependent derivative. The medium is a transversely isotropic thick plate, from which the isotropy of the material can be derived as a special case. The form of the kernel function in the heat conduction, which actually reflects the effect of memory, can be chosen freely according to the necessity of applications. Though the graphical representations are self-explanatory in exhibiting the different peculiarities which occur in the propagation of waves, the following remarks may be added:
-
1.
Because high-intensity focused ultrasound plays a central role in such problems with wide industrial applications, study on the MGT theory is of great interest in various scientific fields such as modern aeronautical and astronautical engineering, high-energy particle accelerating devices and different systems exploited in the industries. Therefore, the contribution of the relaxation parameter in the heat conduction law of MGT theory reflects high significance in such situations.
-
2.
In order to study some practical relevant heat transfer problems involving very short time intervals and in the problems of very high heat fluxes, the temperature profile for Lord–Shulman and Green–Naghdi theory increases abruptly and a sudden decay in the temperature profile is noticed, which is not realistic. However, for MGT theory, the effect of temperature is more prominent within the medium. Since, for MGT theory, the lagging behavior in the heat conduction is considered when the elapsed times during a transient process are very small, say about \(10^{-7}\), so the prominent effect of temperature is quite plausible. Therefore, in the case of such problems, it is more convenient to consider the MGT heat transport model.
-
3.
For the thermoelastic interactions in a thick plate, the case when a nonlinear kernel function is involved in the heat transport law, the degree of the delay time influences the transport phenomena more compared to a linear kernel function, and in conclusion, it is advantageous to formulate the heat transport law with nonlinear kernel.
-
4.
The purpose of the present survey is to introduce a generalized model for the Fourier’s law of heat conduction with time-delay involving a kernel function by using the definition for reflecting the memory effect (instantaneous change rate depends on the past state). Here, the linearity and nonlinearity in the kernel of the heat conduction law justify the classification of the materials according to the time-delay parameter, which is a new indicator of its ability to conduct heat in the conducting medium.
-
5.
Presence of gravitational field diminishes the magnitudes of the profiles of the thermophysical quantities.
Data availability
Not applicable.
References
P A Thompson Compressible-fluid dynamics (New York: McGraw-Hill) (1972)
S Gupta, R Dutta and S Das J. Ocean Engrng Sci. (2022). https://doi.org/10.1016/j.joes.2022.01.010
W Chena and R Ikehata J. Differ Eqs. 292 176 (2021)
F Dell’Oro, I Lasiecka and V Pata J. Differ Eqs. 261 4188 (2016)
A E Abouelregal, H M Sedighi, S A Faghidian and A H Shirazi Facta Universitatis, Series: Mech. Engirng. 19 633 (2021)
D Atta J. Appl. Comput. Mech. 8 1358 (2022)
C Cattaneo CR Acad Sci Paris. 247 431 (1958)
H H Lord and Y Shulman J. Mech. Phys. Solids 15 299 (1967)
A E Green and P M Naghdi Proc. Roy Soc. London Ser. A. 432 171 (1992)
A E Green and P M Naghdi J. Therm. Stress. 15 252 (1992)
A E Green and P M Naghdi J. Elast. 31 189 (1993)
R Quintanilla Math. Mech. Solids. (2019). https://doi.org/10.1177/1081286519862007
A E Abouelregal, H M Sedighi, A H Shirazi, M Malikan and V A Eremeyev Cont. Mech. Thermodyn. 34 1067 (2022)
A Sur Mech. Time Dep. Mater. (2023). https://doi.org/10.1007/s11043-023-09626-8
S Mondal, A Sur and M Kanoria Acta. Mech. 230 4367 (2019)
J L Wang and H F Li Comput. Math. Appl. 62 1562 (2011)
J Suzuki, Y Zhou, M D’Elia and M Zayernouri Comput. Meth. Appl. Mech. Engrng 373 113494 (2021)
A E Abouelregal, Ö Civalek and H F Oztop Int. Commun. Heat Mass Transf. 128 105649 (2021)
C W Y Leong, J W S Leow, R R Grunstein, S L Naismith, J Z Teh, A L D’Rozario and B Saini Sleep Med Rev. 62 101605 (2022)
S Mondal, A Sur, D Bhattacharya and M Kanoria Ind. J. Phys. 94 1591 (2020)
A Sur, S Mondal and M Kanoria J. Multisc. Model 11 2050002 (2020)
A S El-Karamany and M A Ezzat J. Therm. Stress. 39 1035 (2016)
G Honig and U Hirdes J. Comp. Appl. Math. 10 113 (1984)
A Sur Waves Rand. Compl. Media 32 1468 (2022)
A Sur and M I A Othman Waves Random Compl. Media 32 1228 (2022)
A Sur Waves Random Compl. Media 32 251 (2022)
A Sur Waves Random Compl. Media 32 137 (2022)
A Sur and M Kanoria Thin-Walled Struct. 126 85 (2018)
R S Dhaliwal and A Singh. Dynamic coupled thermoelasticity, Hindustan Pubm Delhi (1980)
N M El-Maghraby J. Therm. Stress. 27 227 (2004)
Funding
Not applicable.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The author declare that they have no conflict of interest.
Informed consent
Not applicable.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendix
Appendix
1.1 Numerical Inversion of the double transform
The expression for \({\overline{f}}(x,y,p)\), the Laplace transform of f(x, y, t), can be obtain from \(\widehat{{\overline{f}}}(x,q,p)\) by taking its Fourier inversion given as follows:
where \(\widehat{{\overline{f}}}_e\) and \(\widehat{{\overline{f}}}_0\) denote the even and odd part of \(\widehat{{\overline{f}}}(x,q,p)\) , respectively.
To get the solution in space-time domain, we have to apply Laplace inversion to equation (A.1) which have been done numerically using a method based on Fourier series expansion technique [23]. The outline of the numerical inversion method used is given as follows:
Let \({\overline{f}}(x,y,p)\) be the Laplace transform of a function f(x, y, t). Then, the inverse formula for Laplace transform can be written as
where \(\gamma\) is an arbitrary real number greater than real part of all the singularities of \({\overline{f}}(x,y,p).\) Taking \(p=\gamma +iw,\) the preceding integral takes the form
Expanding \(e^{-\gamma {t}}f(x,y,t)\) in a Fourier series in the interval [0, 2T], we obtain the approximate formula [23]
where
and \(E_D\) is the discretization error. The error \(E_D\) can be made arbitrary small by choosing \(\gamma\) large enough [23]. Since the infinite series in Eq.(A.5) can be summed up to a finite number N of terms, the approximate value of f(x, y, t) becomes
Using the formula to evaluate f(x, y, t), we introduce a truncation error \(E_T\) that must be added to the discretization error. Two methods are used to reduce the total error. First, the ‘Korrecktur’ method is used to reduce the discretization error. Next, the \(\varepsilon -\)algorithm is used to accelerate convergence. The ‘Korrecktur’ method uses the following formula to evaluate the function f(x, y, t)
where the discretization error \(|E'_D|\ll |E_D|.\) Thus, the approximate value of f(x, y, t) becomes
We shall now describe the \(\varepsilon -\)algorithm that is used to accelerate the convergence of the series in Eq. (A.5). Let \(N=2q+1\), where q is a natural number and \(s_{m} = \sum\nolimits_{{k = 1}}^{m} {c_{k} }\) is the sequence of partial sum of series in (A.7). We define the \(\varepsilon -\)sequence by
and
It can be shown that [23] the sequence \(\varepsilon _{1,1}\), \(\varepsilon _{3,1}\), \(\varepsilon _{5,1}\), \(\ldots\), \(\varepsilon _{N,1}\) converges to \(f(x,y,t)+E_D-\frac{c_0}{2}\) faster than the sequence of partial sums \(s_m,m=1,\; 2,\; 3,\; \ldots\). The actual procedure used to invert the Laplace transform consists of using Eq. (A.6) together with the \(\varepsilon -\)algorithm. The values of \(\gamma\) and T are chosen according to the criterion outlined in [23].
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Sur, A. Moore–Gibson–Thompson generalized heat conduction in a thick plate. Indian J Phys 98, 1715–1726 (2024). https://doi.org/10.1007/s12648-023-02931-5
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12648-023-02931-5