
Abstract
The studies of the dynamic behaviors of nonlinear models arising in ocean engineering play a significant role in our daily activities. In this study, we investigate the coupled Boussinesq equation which arises in the shallow water waves for two-layered fluid flow. The modified exp \((-\varphi (\zeta ))\)-expansion function method is utilized in reaching the solutions to this equation such as the topological kink-type soliton and singular soliton solutions. The interesting 2D and 3D graphics of the obtained analytical solutions in this study are presented. Via one of the reported analytical solutions, the finite forward difference method is used in obtaining the approximate numerical and exact solutions to this equation. The Fourier–Von Neumann analysis is used in checking the stability of the used numerical method with the studied model. The \(L_{2}\) and \(L_{\infty }\) error norms are computed. We finally present a comprehensive conclusion to this study.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
In the past two decades, investigations of the solutions to the various nonlinear evolution equations (NLEEs) have attracted the attention of many scientists from all over the world. Nonlinear evolution equations are used in modeling complex nonlinear aspects describing some of our real-life problems in the various fields of nonlinear sciences such as modeling the interaction between atmosphere and ocean influences, optic fibers, fluid mechanics, hydrodynamics, metrology and plasma physics. It is very important to investigate the behaviors of the models that arise in dynamics of the ocean because of the vital roles they play in our daily activities.
Various analytical and numerical techniques have been formulated for tackling these kinds of nonlinear models such as the improved tan\((\varphi /2)\)-expansion method [1], the sine-Gordon expansion method [2,3,4,5,6,7,8], the multivariate transformation technique [9], the homogeneous balance method [10], the Jacobi elliptic function method [11, 12], the extended homoclinic test function method [13], the local fractional Riccati differential equation method [14], the improved Bernoulli sub-equation function method [15], the Hirota’s bilinear method, homoclinic test approach and parameter perturbation technique [16], semi-inverse variational principle [17], the modified simple equation method [18], the ansatz and mapping methods [19], the lumped Galerkin approach [20], the Fourier pseudo-spectral method [21], the shooting method [22], the meshless kernel-based method of lines [23] and many other mathematical approaches [24,25,26,27,28,29,30,31,32,33,34,35,36,37,38,39,40,41,42,43,44,45,46,47,48,49,50,51,52,53,54].
This study uses the modified exp \((-\varphi (\zeta ))\)-expansion function method (MEFM) [55,56,57,58] in constructing analytical solutions to the coupled Boussinesq equation [59]. We further utilize the finite forward difference scheme in obtaining the numerical and exact approximations to the coupled Boussinesq equation by taking one of the obtained analytical solutions into consideration.
The Boussinesq equations for variable water depth that are effective for shallow water and referred to as the standard Boussinesq equations were first developed by Peregrine [60, 61]. The Boussinesq-type equations are very popular nonlinear evolution equations formulated for describing the dynamics of water with small amplitude and long wave. Boussinesq-type equations are also the most important equations in the prediction of wave transformations in coastal areas. The Boussinesq equation is widely used in coastal and ocean engineering. Tsunami wave modeling and mathematical modeling of tidal oscillations show some of the applications of this equation in ocean engineering [60, 61].
The coupled Boussinesq equation is given by [59]
Boussinesq equations are used to model the dynamics of shallow water waves that arise in different places like rivers, lakes and sea beaches [59, 60]. The coupled Boussinesq equation arises in the shallow water waves for two-layered fluid flow. This occurs whenever there is an accidental oil spill from a ship that results in a layer of oil floating above the layer of water [60, 61].
2 The MEFM
In this section, we present the general facts of the MEFM .
Consider the nonlinear partial differential equation of the form
where \(v=v(x, t)\) is an unknown function, and F is a polynomial in v(x, t) and its derivatives. The subscript indicates the partial derivatives of v with respect to x and t.
Step 1: Consider the following wave transformation:
Substituting Eq. (3) into Eq. (2) yields the following nonlinear ordinary differential equation (NODE):
where Q is a polynomial of V and its derivatives.
Step 2: The solution of Eq. (4) is assumed to be of the form [55]
where \(A_{i}, B_{j}, (0\le i\le \delta , 0\le j\le \sigma )\) are constants to be obtained later, such that \(A_{\delta }\ne 0\), \(B_{\sigma }\ne 0.\)
The function \(\varphi =\varphi (\zeta )\) simplifies the following nonlinear ordinary differential equation (NODE):
Equation (6) has the following family of solutions [55]:
Family 1: When \(\mu \ne 0\), \(\lambda ^{2}-4\mu >0\),
Family 2: When \(\mu \ne 0\), \(\lambda ^{2}-4\mu <0\),
Family 3: When \(\mu =0\), \(\lambda \ne 0\) and \(\lambda ^{2}-4\mu >0\),
Family 4: When \(\mu \ne 0\), \(\lambda \ne 0\) and \(\lambda ^{2}-4\mu =0\),
Family 5: When \(\mu =0\), \(\lambda =0\) and \(\lambda ^{2}-4\mu =0\),
\(A_{i}, B_{j}, (0\le i\le \delta , 0\le j\le \sigma )\), \(E, \lambda , \mu \) are coefficients to be obtained, and \(\sigma \), \(\delta \) are positive integers that can be determined by using the homogeneous balancing principle.
Step 3: Substituting Eq. (5) with fixed value of \(\delta \) and \(\sigma \), its possible derivatives along with Eq. (6) into Eq. (4), we get a polynomial in powers of \(e^{-\varphi (\zeta )}\). We collect a set of algebraic equations from the polynomial by equating each summation of the coefficients of \(e^{-\varphi (\zeta )}\) with the same power to zero. To get the solutions of (2), we solve the set of equations with aid of symbolic software and get the values of the coefficients \(A_{i}, B_{j}, (0\le i\le \delta , 0\le j\le \sigma )\), \(E, \lambda , \mu \). Substituting the obtained values of the coefficients into Eq. (5) gives the solutions to (2).
3 The analysis of FDM
In this section, we give the analysis of the finite forward difference. To present this analysis, the following notations need to be given:
-
1.
\(\Delta x\) is the spatial step
-
2.
\(\Delta t\) is the time step
-
3.
\(x_{i}=a+i\Delta x,\)\(i=0,1,2,...,N\) points are the coordinates of mesh and \( N=\frac{b-a}{\Delta x},\)\(t_{j}=j\Delta x,\)\(j=0,1,2,...,M\) and \(M=\frac{T}{ \Delta t}\).
-
4.
The functions \(v\left( x,t\right) \) and \(w\left( x,t\right) \) represent the values of these solutions at these grid points; \(v\left( x_{i},t_{j}\right) \approx v_{i,j}\) and \(w\left( x_{i},t_{j}\right) \approx w_{ij}\), respectively.
-
5.
\(v_{i,j}\) and \(w_{i,j}\) represent the numerical solutions of the exact values of \(v\left( x,t\right) \) and \(w\left( x,t\right) \) at the point \(\left( x_{i},t_{j}\right) \), respectively.
For v(x, t):
For w(x, t):
Thus, one may approximate the partial derivatives into the finite difference operators as
For v(x, t):
For w(x, t):
One may rewrite Eq. (1) in the finite forward difference operator’s form as
We get the following indexed forms by substituting Eqs. (12–16) into Eq. (22):
where the initial values \(u_{i,0}=u_{0}(x_{i})\) and \(v_{i,0}=v_{0}(x_{i})\).
4 Von Neumann stability analysis
In this section, the stability of the numerical scheme with the coupled Boussinesq equation is analyzed by using the Fourier–Von Neumann stability analysis (Figs. 1, 2, 3, 4). We consider \(\zeta ^{n}\) as the amplification factor. The growth factor of a typical Fourier mode may be given as follows:
where \(i=\sqrt{-1}\).
To check the stability of the numerical scheme, the nonlinear terms in the coupled Boussinesq equation \(vv_{x}, wv_{x}\) and \(vw_{x}\) must be linearized by making v and w local constants. Thus, the nonlinear terms \(vv_{x}, wv_{x}\) and \(vw_{x}\) become \(Av_{x}, Bv_{x}\) and \(Aw_{x},\) respectively.
The finite difference operator form of these linearized terms is given as
where \(A=v_{m}^{n}\) and \(B=w_{m}^{n}.\)
Implementing these changes on Eq. (22), one may obtain
Now, inserting Eq. (25) into Eq. (27) yields
where \(A=v_{m}^{n}, B=w_{m}^{n}\) Next, Let \(\zeta ^{n+1}=\zeta \zeta ^{n}\) and assume that \( \zeta \) is independent of time. Then, we easily obtain the following system of algebraic equations.
Therefore,
According to the Fourier stability, numerical scheme is unconditionally stable as \(\left| \zeta _{1}\right| \le 1,\)\(\left| \zeta _{1}\right| \le 1\).
5 L\(_{2}\) and L\(_{\infty }\) Error Norms
To show how close the exact and numerical solutions are, we use \(L_{2}\) and \(L_{\infty }\) error norms.
The \(L_{2}\) and \(L_{\infty }\) error norms are defined as [62]
6 Theoretical calculations
In this section, we present the computational parts of the study.
6.1 Application of the MEFM to Eq. (1)
In this subsection, we present the application of the MEFM to the coupled Boussinesq equations.
Consider the coupled Boussinesq equations given in Eq. (1).
Using the wave transformation
Eq. (1) is carried to the following single NODE:
where \(W=kV-\frac{V^{2}}{2}\).
Balancing the terms \(V^{''}\) and \(V^{3}\) in (35), we have the following relation between \(\sigma \) and \(\delta \):
choosing \(\sigma =1\) implies that \(\delta =2\).
Using \(\sigma =1\), \(\delta =2\) along with Eq. (5), we get
Substituting Eq. (37) and its second derivative into Eq. (35), we get an equation in a polynomial of \(e^{-\varphi }\). We collect a group of the algebraic equation from this polynomial by equating the sum of the coefficients of \(e^{-\varphi }\) with the same power to zero. We solve the group of equations with the help of Wolfram Mathematica software and find the values of the coefficients. The values of the coefficients are obtained in various cases. For each case, to obtain the solutions of Eq. (1), we put the values of the coefficients into Eq. (37) along with one of (Family 1–5).
Case-1:
Case-2:
With case-1, we obtained the following families of solutions:
solution-1:When \(\mu \ne 0\), \(\lambda ^{2}-4\mu >0\),
where
\(\psi _{1.1}(x,t)=\frac{1}{2}\Big (E+x-\sqrt{\lambda ^{2}-4\mu }\;t\Big ) \times \sqrt{\lambda ^{2}-4\mu }.\)

solution-2: When \(\mu =0\), \(\lambda \ne 0\) and \(\lambda ^{2}-4\mu >0\),
where
\(\psi _{1.2}(x,t)=\frac{1}{2}\lambda (E+x-\lambda t).\)

With case-2, we obtained the following families of solutions:
solution-1:When \(\mu \ne 0\), \(\lambda ^{2}-4\mu >0\),
where
\(\psi _{2.1}(x,t)=\frac{1}{2}k\Big (E+x-kt\Big ).\)

solution-2: When \(\mu =0\), \(\lambda \ne 0\) and \(\lambda ^{2}-4\mu >0\),
where
\(\psi _{2.2}(x,t)=\frac{1}{2}k(E+x-k t).\)

6.2 Exact and numerical approximations
In this subsection, we obtain the exact and numerical approximations of Eq. (1) using Eq. (38) and (39) and the datum \(k=1,\lambda = 3, \mu =2, E=2.5\). Substituting these values into Eqs. (38) and (39) gives the following special exact solutions for the approximations:
At \(t=0\), Eqs. (46) and (47) become
Inserting \((\Delta x)=(\Delta t)=0.01\) into Eq. (23) and (24) yields
respectively.
Hence, we present the exact and numerical approximations of Eq. (1) in Tables 1 and 2 and \(L_{2}\) and \(L_{\infty }\) error norms in Table 3.



Absolute error graph under Eq. (38)

Absolute error graph under Eq. (39)
7 Results and discussion
In this study, we successfully employed the modified exp \((-\varphi (\zeta ))\)-expansion function method to the coupled Boussinesq equation. Several wave solutions are constructed. Jawad et al. [59] constructed some exponential function and non-topological soliton solutions to the coupled Boussinesq equation. In this study, soliton, topological kink-type soliton and singular soliton solutions are reported. When we compare our results with the results presented in [59], we observed that the reported analytical solutions in this study are newly constructed. Furthermore, the well-known numerical scheme, namely the finite forward difference method, is used in obtaining the approximate exact and numerical solutions to the coupled Boussinesq equation. We observed that as \(\Delta x=\Delta t\) are getting smaller, the approximations are approaching zero (Figs. 5 and 6).
8 Conclusion
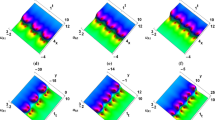
In this study, we use the modified exp \((-\varphi (\zeta ))\)-expansion function method in obtaining the analytical solutions to the coupled Boussinesq equation. Topological kink-type soliton, soliton and singular soliton solutions are successfully extracted. By choosing the suitable values of the parameters, the 2D and 3D of the reported solutions are also plotted. Via one of the obtained analytical solutions, the finite forward difference scheme is used in approximating the exact and numerical solutions to the studied nonlinear model. The stability of the numerical scheme is also checked. The \(L_{2}\) and \(L_{\infty }\) error norms are also computed (Figs. 7, 8). The numerical and exact approximations are compared, and the comparison is supported by graphical plots.
The modified exp \((-\varphi (\zeta ))\)-expansion function method is an efficient mathematical tool which provides good analytical solutions for numerical study, and finite forward difference method supplies good approximations when it is utilized on these analytical solutions.
References
C T Sindi and J Manafian Eur. Phys. J. Plus 132 67 (2017)
H M Baskonus, T A Sulaiman and H Bulut, Optik 131 1036 (2017)
H Bulut, T A Sulaiman and H M Baskonus Opt. Quant. Electron 48 564 (2016)
H M Baskonus Nonlinear Dyn 86(1) 177 (2016)
H Bulut, T A Sulaiman and B Demirdag Nonlinear Dyn 91 1985 (2018)
T A Sulaiman, T Akturk, H Bulut and H M Baskonus Journal of Electromagnetic Waves and Applications 32(9) 1093 (2018)
A Yokus, T A Sulaiman and H Bulut Opt. Quant. Electron 50 31 (2018)
H M Baskonus, H Bulut and T A Sulaiman Eur. Phys. J. Plus 132 482 (2017)
R Pal, H Kaur, T S Raju and C N Kumar Nonlinear Dyn 89(1) 617 (2017)
E Fan and H Zhang Physics Letters A 246(5) 403(1998)
E Fan and J Zhang Physics Letters A 305(6) 383 (2002)
Z Zhang Rom Journ Phys 60 1384 (2015)
C Wang Nonlinear Dyn 85(2) 1119-1126 (2016)
X J Yang, F Gao and H M Srivastava Computers and Mathematics with Applications 73(2) 203 (2017)
H M Baskonus and H Bulut Waves in Random and Complex Media 26(2) 201 (2016)
W Tan and Z Dai Nonlinear Dyn 89(4) 2723 (2017)
M T Darvishi, M Najafi and A M Wazwaz Ocean Engineering 130 228 (2017)
M Eslami, M A Mirzazadeh and A Neirameh Pramana 84(1) 3 (2015)
E V Krishnan, S Kumar and A Biswas Nonlinear Dyn 70(2) 1213 (2012)
H Zeybek and S B G Karakoc SpringerPlus 5 199 (2016)
H Borluk and G M Muslu Numerical Methods for Partial Differential Equations 31 995 (2014)
W M K A W Zaimi, A Ishak and I Pop Journal of King Saud University-Science 25 143 (2013)
Y Dereli Int J Nonlinear Sci 13(1) 28(2012)
H Demiray J App Eng Math 1(1) 49 (2011)
C Yong and L Biao Chinese Physics 13(3) 302 (2004)
A R Seadawy and D Lu Results in Physics 6 590 (2016)
A R Seadawy and D Lu Results in Physics 7 43 (2017)
A R Seadawy Mathematical Methods and Applied Sciences 40(5) 1598 (2017)
A R Seadawy The European Physical Journal Plus 132 29 (2017)
A R Seadawy Optik 139 31 (2017)
A R Seadawy Journal of Electromagnetic Waves and Applications 1353 (14) 1353 (2017)
A R Seadawy The Pramana-Journal of Physics 89(3) 49 (2017)
A R Seadawy Applied Mathematical Sciences 6(82) 4081 (2012)
Z Lu and H Zhang Chaos, Solitons and Fractals 19 527 (2004)
C Dai and Y Wang Chaos, Solitons and Fractals 39 350 (2009)
H Zhang Communications in Nonlinear Science and Numerical Simulation 12(5) 627 (2007)
H Bulut, H A Isik and T A Sulaiman, ITM Web of Conferences 3 01019 (2017)
O A Ilhan, T A Sulaiman, H Bulut and H M Baskonus, Eur. Phys. J. Plus 133 27 (2018)
R I Nuruddeen, L Muhammad, A M Nass and T A Sulaiman, Palestine Journal of Mathematics 7(1) 262 (2018)
H Bulut, T A Sulaiman and H M Baskonus, Optik 163 49 (2018)
J Zhang, F Jiang and X Zhao International Journal of Computer Mathematics 87(8) 1716 (2010)
H M Baskonus, H Bulut and F B M Belgacem Journal of Computational and Applied Mathematics 312 257 (2017)
E Aranda and P Pedregal Journal of the Franklin Institute 351(1) 3865 (2014)
A Ashyralyev and Y Ozdemir Journal of the Franklin Institute 351(2) 602 (2014)
N S Akbar, S Nadeem, R U Haq and Z H Khan Indian Journal of Physics 87(11) 1121 (2013)
H Bulut, T A Sulaiman, H M Baskonus and T Akturk Opt Quant Electron 50 134 (2018)
A Yokus, H M Baskonus, T A Sulaiman and H Bulut Numerical Methods of Partial Differential Equations 34(1) 211 (2018)
A R Seadawy Physics of Plasmas 21 052107 (2014)
A R Seadawy Computers and Mathematics with Applications 70(4) 345 (2015)
A R Seadawy The European Physical Journal Plus 130 182 (2015)
A R Seadawy Physica A 439 124 (2015)
A R Seadawy Appl. Math. Inf. Sci. 10(1) 209 (2016)
A R Seadawy Computers and Mathematics with Applications 71(1) 201 (2016)
A R Seadawy Physica A 455 44 (2016)
H M Baskonus, H Bulut and A Atangana Smart Materials and Structures 25(3) 035022 (2016)
A Ciancio, H M Baskonus, T A Sulaiman and H Bulut Indian J Phys 92(10) 1281 (2018)
O A Ilhan, H Bulut, T A Sulaiman and H M Baskonus Indian J Phys 92(8) 999 (2018)
S Duran, M Askin and T A Sulaiman IJOCTA 7(3) 240 (2017)
A J M Jawad, M D Petkovic, P Laketa and A Biswas Scientia Iranica B 20(1) 179 (2013)
A Wazwaz Journal of Computational and Applied Mathematics 207(1) 18 (2007)
D H Peregrine J Fluid Mech 27 815 (1967)
A Yokus and D Kaya Journal of Nonlinear Science and Applications 10 3419 (2017)
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Sulaiman, T.A., Bulut, H., Yokus, A. et al. On the exact and numerical solutions to the coupled Boussinesq equation arising in ocean engineering. Indian J Phys 93, 647–656 (2019). https://doi.org/10.1007/s12648-018-1322-1
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12648-018-1322-1