
Abstract
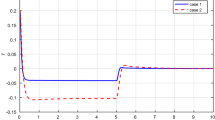
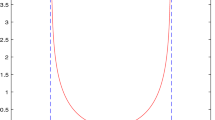
This paper develops an adaptive fuzzy control method for accommodating actuator faults in a class of unknown nonlinear systems with unmeasured states. The considered faults are modeled as lock-in-place (stuck at unknown place). With the help of fuzzy logic systems to approximate the unknown nonlinear functions, and K-filters are designed to estimate the unmeasured states. Combining the backstepping technique with the nonlinear fault-tolerant control theory, a novel adaptive fuzzy faults-tolerant control (FTC) approach is constructed. It is proved that the proposed control approach can guarantee that all the signals of the resulting closed-loop system are bounded and the tracking error between the system output and the reference signal converges to a small neighborhood of zero by appropriate choice of the design parameters. Simulation results are provided to show the effectiveness of the control approach.
Article PDF
Similar content being viewed by others

Avoid common mistakes on your manuscript.
References
B. Chen, X. P Liu, and P. Shi, “Direct adaptive fuzzy control for nonlinear systems with time-varying delays,” Inf. Sci., vol. 180, no. 5, pp. 776–792, 2010.
B. Chen, X. P. Liu, K. F. Liu, and C. Lin, “Direct adaptive fuzzy control of nonlinear strict-feedback systems,” Automatica, vol. 45, no. 6, pp. 1530–1535, 2009.
M. Wang, B. Chen, X. P. Liu, and P. Shi, “Adaptive fuzzy tracking control for a class of perturbed strict-feedback nonlinear time-delay systems,” Fuzzy Sets Syst., vol. 159, no. 8, pp. 949–967, 2008.
M. Wang, B. Chen, and P. Shi, “Adaptive neural control for a class of perturbed strict-feedback nonlinear time-delay systems,” IEEE Trans. Syst., Man, Cybern. B, vol. 38, no. 3, pp. 721–730, 2008.
W. S. Chen, L. C. Jiao, R. H. Li, and J. Li, “Adaptive backstepping fuzzy control for nonlinearly parameterized systems with periodic disturbances,” IEEE Trans. Fuzzy Syst., vol. 18, no. 4, pp. 674–685, 2010.
B. Chen and X. P. Liu, “Adaptive fuzzy output tracking control of MIMO nonlinear uncertain systems,” IEEE Trans. on Fuzzy Systems, vol. 15, no. 2, pp. 287–300, 2007.
T. S. Li, S. C. Tong, and G. Feng, “A novel robust adaptive-fuzzy-tracking control for a class of nonlinear MIMO systems,” IEEE Trans. on Fuzzy Systems, vol. 18, no. 1, pp. 150–160, 2010.
H. Lee, “Robust adaptive fuzzy control by backstepping for a class of MIMO nonlinear systems,” IEEE Trans. on Fuzzy Systems, vol. 19, no. 2, pp. 265–275, 2011.
C. C. Hua, Q. G. Wang, and X. P. Guan, “Adaptive fuzzy output-feedback controller design for nonlinear time-delay systems with unknown control direction,” IEEE Trans. Syst., Man, Cybern. B, vol. 39, no. 2, pp. 363–374, 2009.
S. C. Tong and Y. M. Li, “Observer-based fuzzy adaptive control for strict-feedback nonlinear systems,” Fuzzy Sets Syst., vol. 160, no. 12, pp. 1749–1764, 2009.
S. C. Tong, C. L. Liu, and Y. M. Li, “Robust adaptive fuzzy filters output feedback control of strict-feedback nonlinear systems,” Int. J. Appl. Math. Comput. Sci., vol. 20, no. 4, pp. 637–653, 2010.
S. C. Tong, C. Y. Li, and Y. M. Li, “Fuzzy adaptive observer backstepping control for MIMO nonlinear systems,” Fuzzy Sets Syst., vol. 160, no. 19, pp. 2755–2775, 2009.
S. C. Tong, G. J. Yang, and W. Zhang, “Observerbased fuzzy fault-tolerant control for fuzzy systems with time delays,” Int. J. Appl. Math. Comput. Sci., vol. 21, no. 4, pp. 617–627, 2011.
D. Xu, B. Jiang, and P. Shi, “Nonlinear actuator fault estimation observer: An inverse system approach via a T-S fuzzy model,” Int. J. Appl. Math. Comput. Sci., vol. 22, no. 1, pp. 183–196, 2012.
D. Ye and G. Yang, “Adaptive fault-tolerant tracking control against actuator faults with application to flight control,” IEEE Trans. on Control Systems Technology, vol. 14, no. 6, pp. 1088–1096, 2006.
G. Yang and D. Ye, “Adaptive fault-tolerant H ∞ control via state feedback for linear systems against actuator faults,” Proc. of the IEEE Conference on Decision and Control, pp. 3530–3535, 2006.
G. Tao, S. M. Joshi, and X. L. Ma, “Adaptive state feedback and tracking control of systems with actuator failures,” IEEE Trans. Autom. Contr., vol. 46, no. 1, pp. 78–95, Jan. 2001.
X. D. Tang, G. Tao, and S. M. Joshi, “An adaptive control scheme for output feedback nonlinear systems with actuator failures,” Proc. of the 15th IFAC World Congress, T-Tu-A03, July, 2002, Barcelona, Spain.
X. Tang, G. Tao, and S. M. Joshi, “Adaptive actuator failure compensation for nonlinear MIMO systems with an aircraft control application,” Automatica, vol. 43, no. 11, pp. 1869–1883, 2007.
M. Lingya and B. Jiang, “Backstepping-based active fault-tolerant control for a class of uncertain SISO nonlinear systems,” Journal of Systems Engineering and Electronic, vol. 20, no. 6, pp. 1263–1270, 2009.
B. Jiang, Z. F. Gao, and P. Shi, “Observer-based integrated robust fault estimation and accommodation design for discrete-time systems,” International Journal of Control, vol. 83, no. 6, pp. 1167–1181, 2010.
P. Li and G. Yang, “Backstepping adaptive fuzzy control of uncertain nonlinear systems against actuator faults,” Control Theory Appl., vol. 7, no. 3, pp. 248–256, 2009.
P. Li and G. Yang, “Adaptive fuzzy control of unknown nonlinear systems with actuator failures for robust output tracking,” Proc. of the American Control Conference, pp. 4898–4903, 2008.
P. Li and G. Yang, “An adaptive fuzzy design for fault-tolerant control of MIMO nonlinear uncertain systems,” Control Theory Appl., vol. 9, no. 2, pp. 244–250, 2011.
S. C. Tong, T. C. Wang, and W. Zhang, “Fault tolerant control for uncertain fuzzy systems with actuator failures,” International Journal of Innovative Computing, Information and Control, vol. 4, no. 10, pp. 2461–2474, 2008.
H. Wu and M. Z. Bai, “Stochastic stability analysis and synthesis for nonlinear fault tolerant control systems based on T-S fuzzy model,” International Journal of Innovative Computing, Information and Control, vol. 6, no. 9, pp. 3989–4000, 2010.
K. Zhang, B. Jiang, and P. Shi, “Fault estimation observer design for discrete-time Takagi-Sugeno fuzzy systems based on piecewise Lyapunov functions,” IEEE Trans. on Fuzzy Systems, vol. 20, no. 1, pp. 192–200, 2012.
K. Nguang, P. Shi, and S. Ding, “Fault detection for uncertain fuzzy systems: an LMI approach,” IEEE Trans on Fuzzy Systems, vol. 15, no. 6, pp. 1251–1262, 2007.
W. J. Chang, C. C. Ku, and P. H. Huang, “Robust fuzzy control via observer feedback for passive stochastic fuzzy systems with time-delay and multiplicative noise,” International Journal of Innovative Computing, Information and Control, vol. 7, no. 1, pp. 345–364, 2011.
L. X. Wang, Adaptive Fuzzy Systems and Control, Prentice Hall, Englewood Cliffs, NJ, 1994.
H. G. Zhang and Y. B. Quan, “Modeling, identification, and control of a class of nonlinear systems,” IEEE Trans. on Fuzzy Systems., vol. 9, no. 2, pp. 349–354, 2001.
Z. P. Jiang and D. J. Dill, “A robust adaptive back-stepping scheme for nonlinear systems with unmodeled dynamics,” IEEE Trans. Autom. Contr., vol. 44, no. 9, pp. 1705–1711, 1999.
Author information
Authors and Affiliations
Corresponding author
Additional information
Recommended by Editorial Board member Bin Jiang under the direction of Editor Poogyeon Park.
This journal was supported by the National Natural Science Foundation of China (Nos. 61074014, 61203008), and Program for Liaoning Innovative Research Team in University (No. LT 2012013).
Baoyu Huo received her BS degree from Mathematics & Information Science College, Hebei Normal University, Shijiazhuang, China, in 2010. She is now working towards an ME degree in Applied Mathematics, from Liaoning University of Technology, Jinzhou, China. Her current research interests include nonlinear adaptive control, fuzzy control and FTC.
Shaocheng Tong received his BA degree in Mathematics from Jinzhou Normal College, Jinzhou, China, an MA degree in Fuzzy Mathematics from Dalian Marine University, PRC, and a Ph.D. degree in Fuzzy Control from Northeastern University, PRC, in 1982, 1988 and 1997, respectively. Currently, he is a Professor in the Department of Basic Mathematics, Liaoning University of Technology, Jinzhou, PRC. His research interests include fuzzy control theory, nonlinear adaptive control, and intelligent control.
Yongming Li received his BS and MS degrees in Applied Mathematics from Liaoning University of Technology, Jinzhou, China, in 2004 and 2007, respectively. He is currently a lecturer in the Department of Basic Mathematics, Liaoning University of Technology. His current research interests include fuzzy and neural networks control and nonlinear adaptive control.
Rights and permissions
About this article
Cite this article
Huo, B., Tong, S. & Li, Y. Observer-based adaptive fuzzy fault-tolerant output feedback control of uncertain nonlinear systems with actuator faults. Int. J. Control Autom. Syst. 10, 1119–1128 (2012). https://doi.org/10.1007/s12555-012-0606-z
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12555-012-0606-z